目录
前言:
一.线位置
二.扩展
三.总结
前言:
这是一篇关于51单片机实机LED点阵的插线图和代码说明.另外还有一篇我写的仿真的连接在这:http://t.csdnimg.cn/ZNLCl,欢迎大家的点赞,评论,关注.

一.线位置
接线实机图.
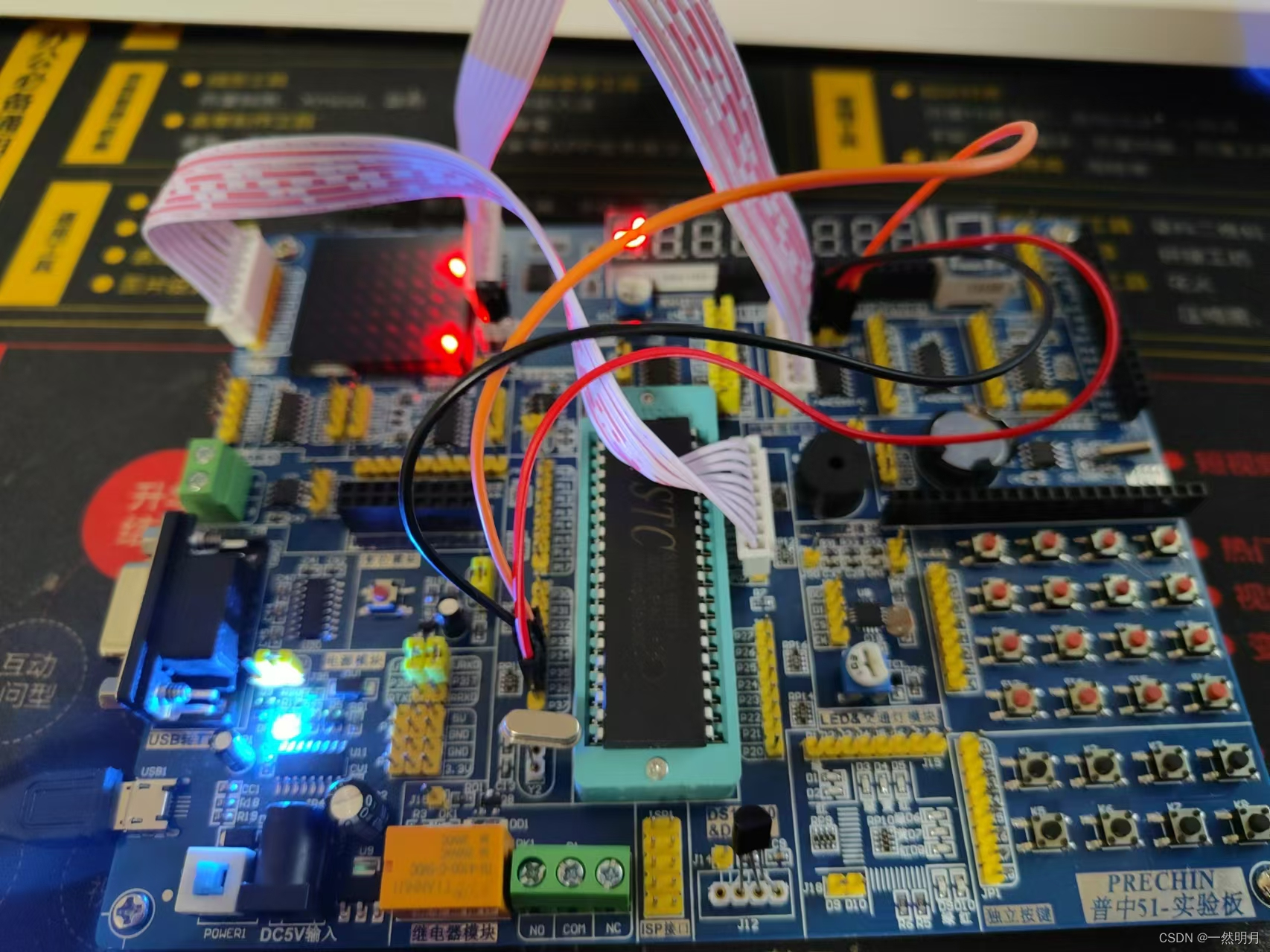
引脚位置注意:
1. *-*
P00->RE8
P01->RE7P02->RE6
P03->RE5
P04->RE4
P05->RE3
P06->RE2
P07->RE1
2. *-*
P34->SE
P35->RC
P36->SC
3. *-*
QQ1->Dp
.....
QA8->A
接下来上代码
#include <reg51.h>
// void delay(unsigned int t)
// {
// unsigned int i, j;
// for (i = 0; i < t; i++) {
// for (j = 0; j < 1275; j++) {
// ; // 空循环,等待时间过去
// }
// }
// }
void main(void)
{
P0 = 0 ;
P2 = 0 ;
while(1)
{
P0 = ~0x01 ;
P2 = 0x01 ;
}
}
就可以看到.随着P0,P2的改变,灯就会改变.
二.扩展
既然基本的已经会了,接下来就可以做点进阶的,比如显示数字0到9;
可以封装一下
u8 gled_row[8]={0x00,0x7C,0x82,0x82,0x82,0x7C,0x00,0x00};//LED点阵显示数字0的行数据
u8 gled_col[8]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe};//LED点阵显示数字0的列数据
然后加上一个循环
while(1)
{
for(i=0;i<8;i++)//循环8次扫描8行、列
{
LEDDZ_COL_PORT=gled_col[i];//传送列选数据
write_data(gled_row[i]);//传送行选数据
delay_us(100);//延时一段时间,等待显示稳定
write_data(0x00);//消影
}
}
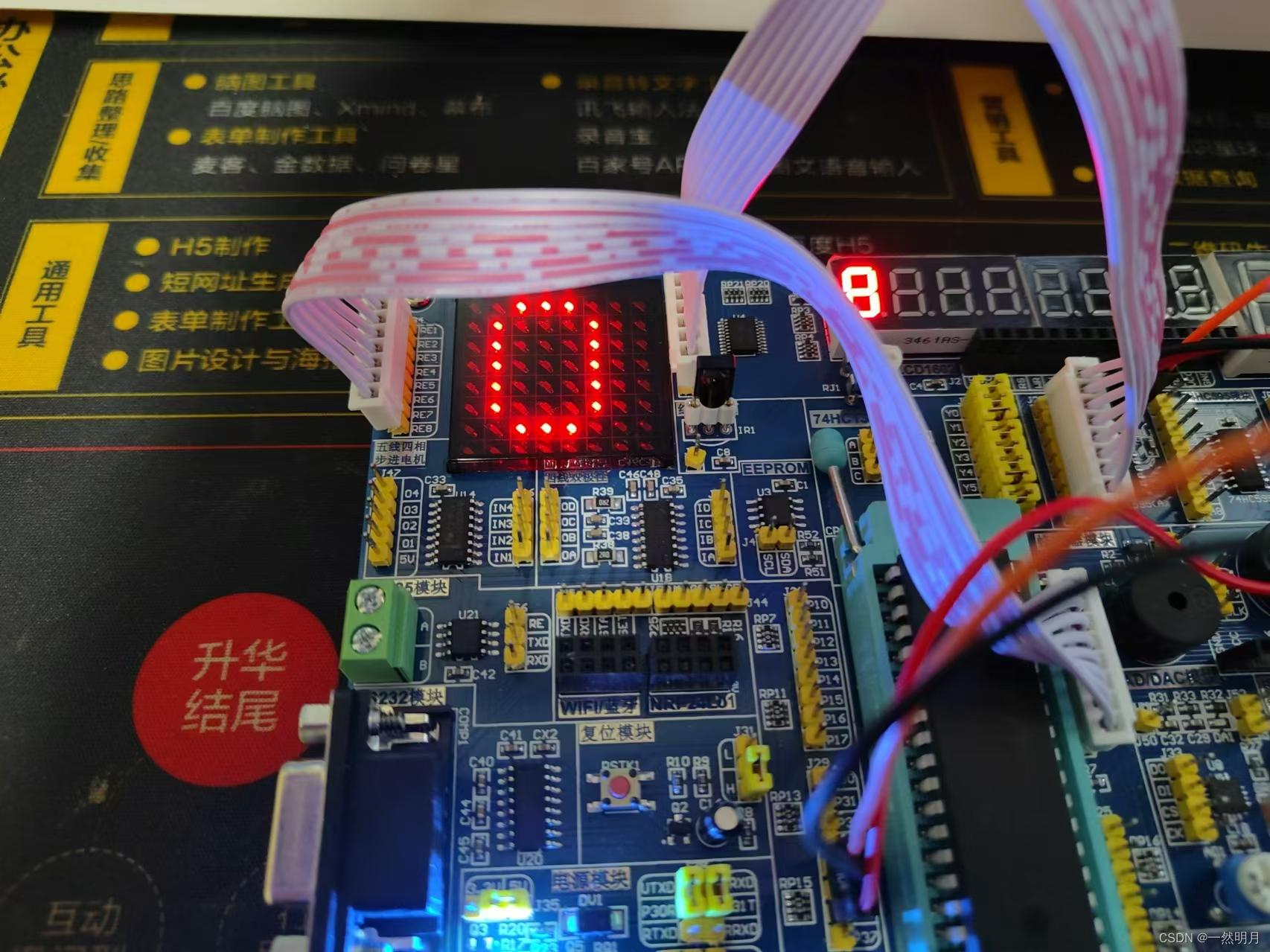
就可以实现了.下面是实机效果图,和完整的代码
#include "reg52.h"
typedef unsigned int u16;
typedef unsigned char u8;
sbit SRCLK=P3^6; //移位寄存器时钟输入
sbit RCLK1=P3^5; //存储寄存器时钟输入
sbit SER=P3^4; //串行数据输入
#define LEDDZ_COL_PORT P0 //点阵列控制端口
u8 gled_row[8]={0x00,0x7C,0x82,0x82,0x82,0x7C,0x00,0x00};//LED点阵显示数字0的行数据
u8 gled_col[8]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe};//LED点阵显示数字0的列数据
void delay_us(u16 ten_us)
{
while(ten_us--);
}
void write_data(u8 dat)
{
u8 i=0;
for(i=0;i<8;i++)//循环8次即可将一个字节写入寄存器中
{
SER=dat>>7;//优先传输一个字节中的高位
dat<<=1;//将低位移动到高位
SRCLK=0;
delay_us(1);
SRCLK=1;
delay_us(1);//移位寄存器时钟上升沿将端口数据送入寄存器中
}
RCLK1=0;
delay_us(1);
RCLK1=1;//存储寄存器时钟上升沿将前面写入到寄存器的数据输出
}
void main()
{
u8 i=0;
while(1)
{
for(i=0;i<8;i++)//循环8次扫描8行、列
{
LEDDZ_COL_PORT=gled_col[i];//传送列选数据
write_data(gled_row[i]);//传送行选数据
delay_us(100);//延时一段时间,等待显示稳定
write_data(0x00);//消影
}
}
}三.总结
以下是关于 51 单片机实机演示 LED 点阵的总结:
51 单片机的作用:
- 作为控制核心,负责数据处理和信号输出。
LED 点阵特点:
- 可以显示各种图形、字符等丰富信息。
- 由多个 LED 灯按矩阵排列组成。
实机演示的关键:
- 硬件连接:正确将 LED 点阵与 51 单片机引脚连接。
- 编程控制:通过编写代码来控制 LED 点阵的显示内容。
实现步骤:
- 硬件搭建,确保连接可靠。
- 初始化 51 单片机相关设置。
- 设计显示数据和刷新逻辑。
- 不断循环更新显示。
显示效果:
- 可以实现静态图像显示。
- 也能实现动态的图像变化或动画效果。
注意事项:
- 要考虑电流驱动能力,避免损坏器件。
- 优化显示算法以提高显示效果和效率。
应用领域:
- 电子广告牌。
- 简单的信息显示设备。
通过 51 单片机实机演示 LED 点阵,能够直观地展现单片机的控制能力和 LED 点阵的显示功能,为进一步开发更复杂的显示应用提供了基础和经验。