Hello,大家好,我是Xiaojie,好久不见,欢迎大家能够和Xiaojie一起学习毫米波雷达知识,Xiaojie准备连载一个系列的文章—DDMA信号处理以及数据处理的流程,本系列文章将从目标生成、信号仿真、测距、测速、cfar检测、测角、目标聚类、目标跟踪这几个模块逐步介绍,这个系列的文章大约是一个7-8篇左右。
最终效果如下:

本篇文章主要讲的是DDMA原理性的部分。
目录
文章目录
- DDMA波形
- DDMA速度解模糊
- DDMA信号仿真
- 参考文献
DDMA波形
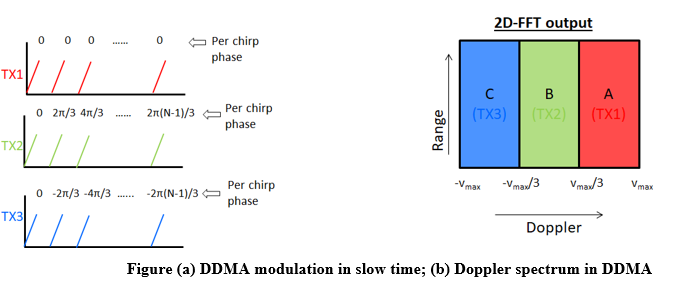
DDMA波形下所有发射天线同时发射,但是每个发射天线的信号都偏移一个特定的频率,通过这个外部偏移的频率使不同发射天线的信号在doppler域上能分离开来。
不同发射天线上的频率偏移是通过在chirp之间上施加不同的相位旋转来实现的,但是在chirp内信号的相位是不变的。
假如发射天线总共有 N t N_t Nt根发射天线,对于发射天线k,在相邻chirp上施加的相移 ω k \omega _k ωk由下式决定:
ω k = 2 π ( k − 1 ) N t , k = 1 , … … , N t \omega_k=\frac{2\pi (k-1)}{N_t},k=1,……,N_t ωk=Nt2π(k−1),k=1,……,Nt
发射天线数量为3根时,具体表现如下图所示(图片来源于TI文档):
当目标的速度超过一定的范围时,就无法根据子带的位置去分离不同的发射天线数据,就会产生DDMA的速度模糊问题。
DDMA速度解模糊
为解决DDMA速度模糊的问题,TI采用的是一种基于空子带的解速度模糊的方法。
在相邻chirp上施加的相移 ω k \omega _k ωk修改为:
ω k = 2 π ( k − 1 ) N t + N e m p t y , k = 1 , … … , N t \omega_k=\frac{2\pi (k-1)}{N_t+N_{empty}},k=1,……,N_t ωk=Nt+Nempty2π(k−1),k=1,……,Nt
N e m p t y N_{empty} Nempty为空子带的数量
发射天线数量为4根,空子带数量为2时,具体表现如下图所示(图片来源于TI文档):

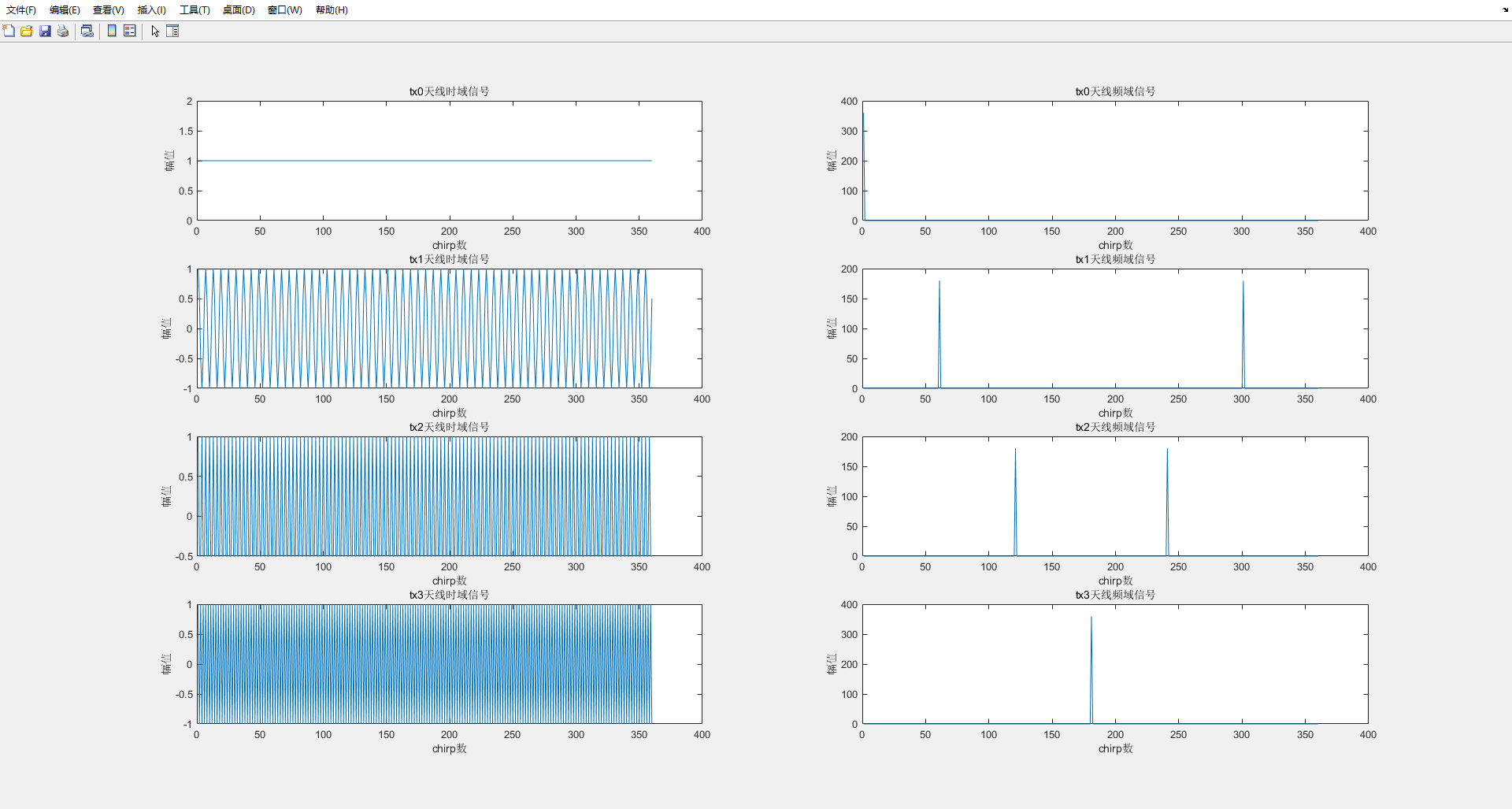
DDMA信号仿真
对DDMA信号进行仿真,参数如下:
发射天线数量:4,
空子带数量:2,
chirp数量:384,
结果如下:
代码如下:
clc;close all;clear;
chirpNums = 384;
txAntennas = 4;
emptySuband = 2;
i = 1:1:chirpNums;
j = 1:1:txAntennas;
phi = zeros(chirpNums,txAntennas);
S = zeros(chirpNums, 1);
for i_index= 1:1:chirpNums
for j_index = 1:1:txAntennas
phi (i_index,j_index)= mod(360*(i_index-1)*(j_index-1)/(txAntennas+emptySuband),360);
end
end
s1(:,1)= cosd(phi(:, 1));
s2(:,1)= cosd(phi(:, 2));
s3(:,1)= cosd(phi(:, 3));
s4(:,1)= cosd(phi(:, 4));
figure;
subplot(4,2,1);plot(((s1)));xlabel('chirp数');ylabel('幅值');title('tx0天线时域信号')
subplot(4,2,3);plot(((s2)));xlabel('chirp数');ylabel('幅值');title('tx1天线时域信号')
subplot(4,2,5);plot(((s3)));xlabel('chirp数');ylabel('幅值');title('tx2天线时域信号')
subplot(4,2,7);plot(((s4)));xlabel('chirp数');ylabel('幅值');title('tx3天线时域信号')
subplot(4,2,2);plot(abs(fft(s1)));xlabel('chirp数');ylabel('幅值');title('tx0天线频域信号');
subplot(4,2,4);plot(abs(fft(s2)));xlabel('chirp数');ylabel('幅值');title('tx1天线频域信号');
subplot(4,2,6);plot(abs(fft(s3)));xlabel('chirp数');ylabel('幅值');title('tx2天线频域信号');
subplot(4,2,8);plot(abs(fft(s4)));xlabel('chirp数');ylabel('幅值');title('tx3天线频域信号');
参考文献
- 《基于 AWR2944 的汽车雷达 DDMA 波形的原理和实现》
至此,本片文章就此结束了。







![[word] word怎样转换成pdf #职场发展#经验分享#职场发展](https://img-blog.csdnimg.cn/img_convert/4ec11645aaa8126e892ff5acb146cd2f.png)