目录
概述
1 系统硬件框架
1.1 框架介绍
1.2 硬件实物图
2 STM32Cub生成工程
2.1 软件版本信息
2.2 配置参数
编辑2.3 生成项目
3 PID算法实现
3.1 概念
3.2 代码实现
4 其他功能实现
4.1 设置电机速度
4.2 PID算法控制电机
4.3 功能函数的调用
5 测试
5.1 测试案例1
5.2 测试案例2
源代码下载地址:
PID算法在电机速度控制上的应-测试源码资源-CSDN文库
概述
本文主要介绍使用PID算法实现电机速度的控制,笔者使用IO外部中断测试码盘的脉冲实现测速功能,通过该速度值,应用PID算法实现调制PWM的占空比,以实现电机速度的控制。
1 系统硬件框架
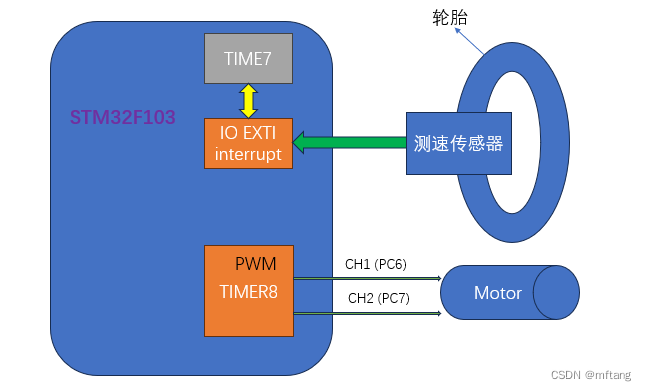
1.1 框架介绍
1) 系统使用光电编码器进行速度测试,具体实现方式可以参看原文:
电机转速计算(基于码盘和IO外部中断)-CSDN博客
2) TIMER7实现定时器功能,其会产生10us的定时器中断,为系统工作提供基准时钟。
3)TIMER8用于产生PWM实现电机速度控制,系统通过电机速度的反馈值以调节PWM的脉冲宽度,以实现电机速度的闭环控制。
1.2 硬件实物图
使用STM32F103RC作为主控芯片,LN298N用于驱动电机,光电码盘用于测试电机转速。具体的测试实物图如下: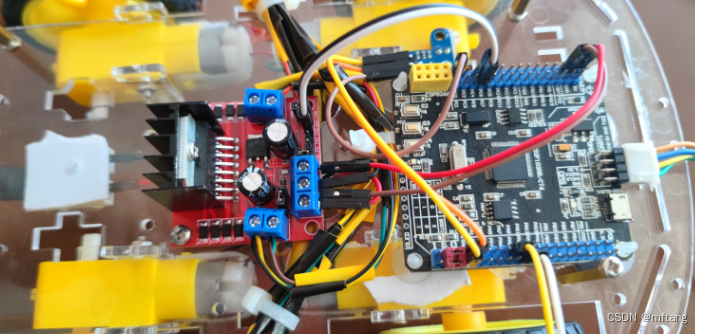
2 STM32Cub生成工程
2.1 软件版本信息
| 软件名称 | 版本信息 |
|---|---|
| STM32Cube | STM32CubeMX 6.11 |
| STM32 HAL | STM32Cube_FW_F1_V1.8.5 |
2.2 配置参数
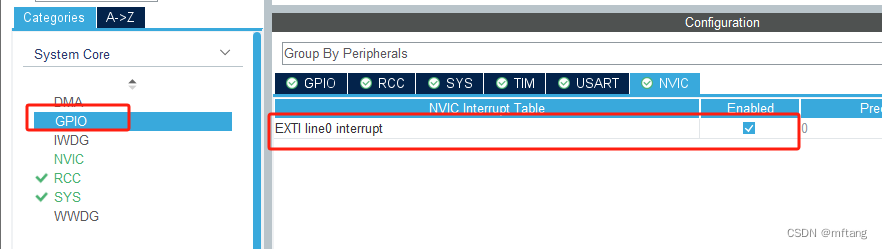
1)配置EXTI IO中断,其用测监测编码器的冲击脉冲,选择PC0接口,同时要使能外部中断函数
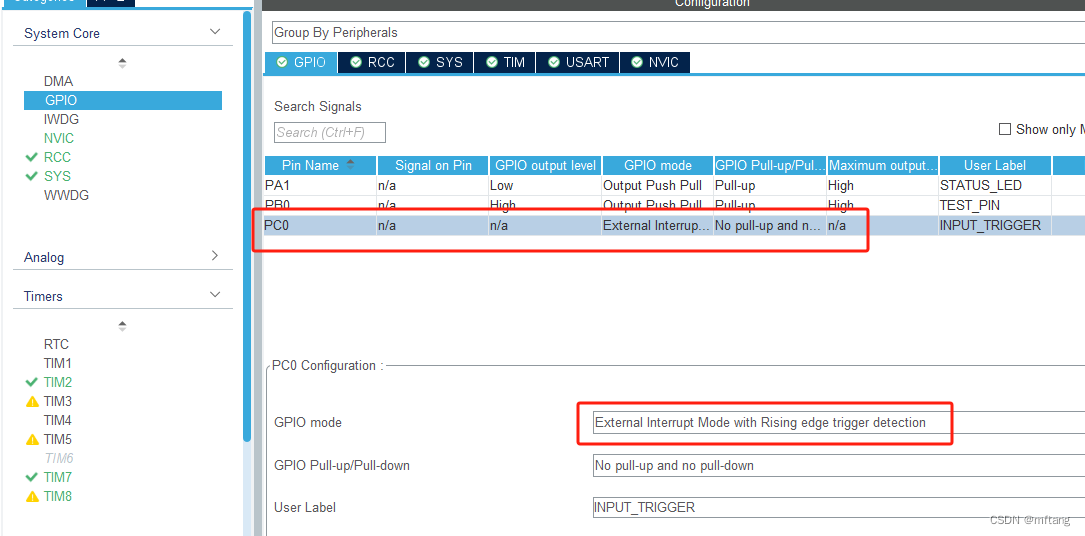
使能中断函数
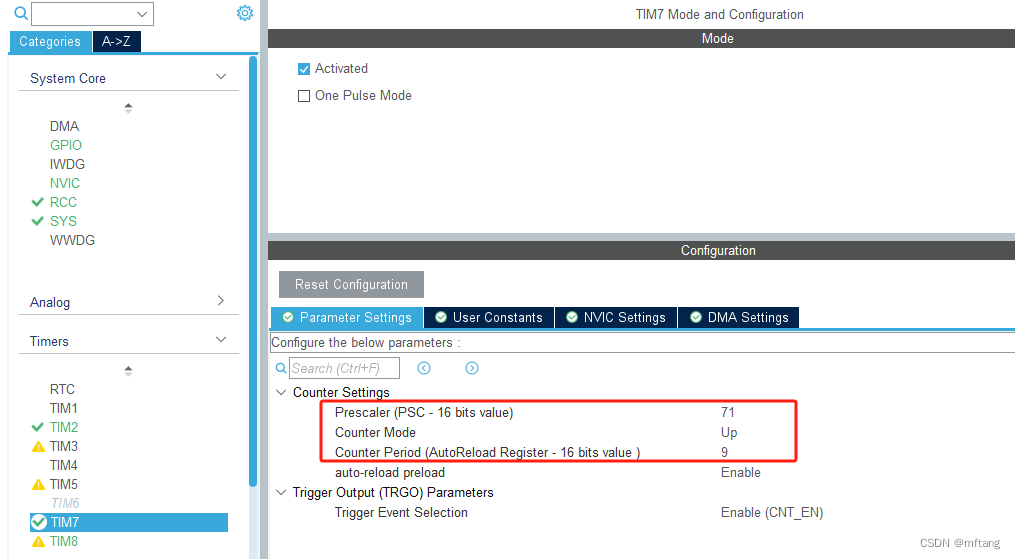
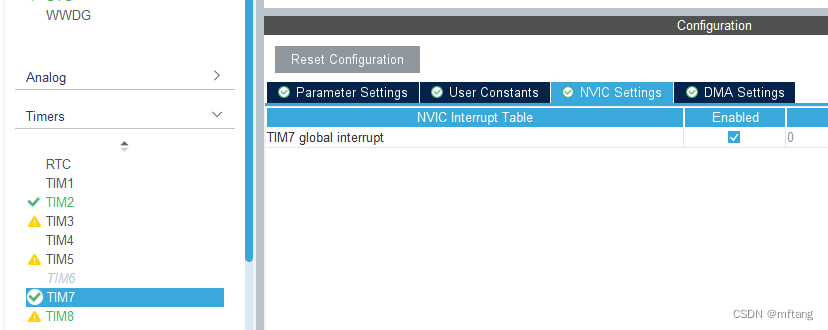
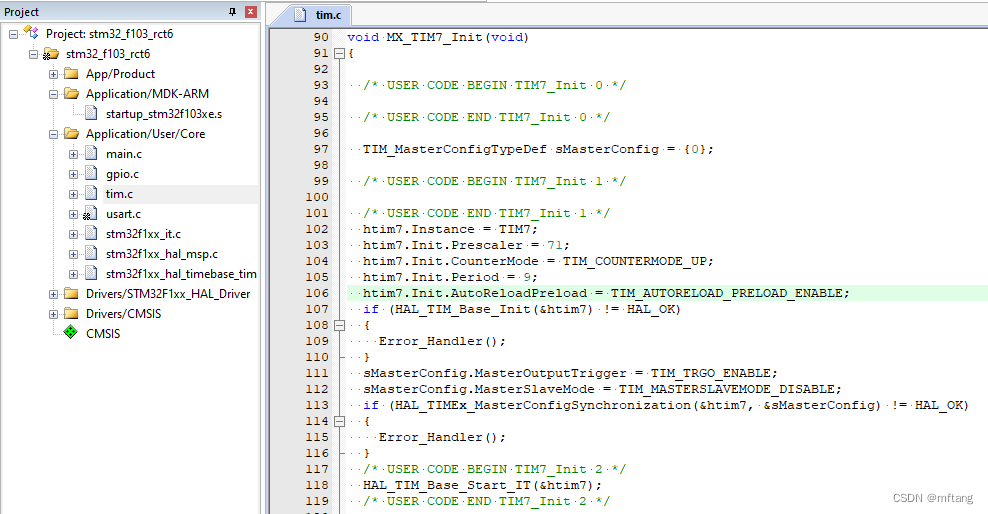
2)配置Timer7,中断间隔为10us,其具体配置参数如下:
使能中断函数
3)配置PWM相关的参数和使能通道
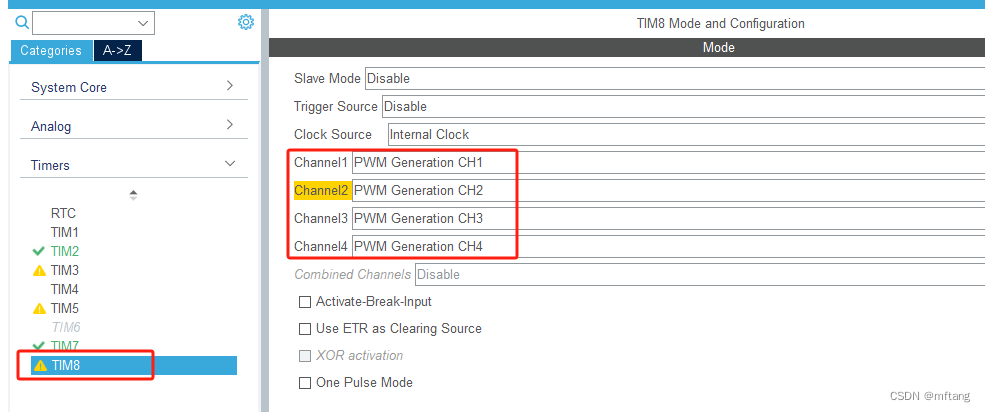
定时器相关的参数配置如下,计数周期为10ms

PWM通道相关的参数:

各个通道对应的IO接口如下:
 2.3 生成项目
2.3 生成项目
配置完成各个参数后,就可以生成项目,打开项目后,其结构如下:
3 PID算法实现
3.1 概念
PID是一种常用的控制算法,全名为比例-积分-微分控制算法(Proportional-Integral-Derivative Control)。它通过对系统的误差进行比例、积分和微分运算,从而对系统进行控制。
PID控制算法的基本原理是:根据当前系统的误差,分别计算比例、积分和微分项,并将它们加权叠加作为最终的控制量。
具体来说,比例项(Proportional)是根据误差的大小与比例系数的乘积来计算的,它决定了控制量与误差之间的直接关系。比例项越大,控制量的调整越快。
积分项(Integral)是根据误差的累积进行计算的,它可以消除系统存在的静态误差,并且对于系统的稳定性有所影响。积分项越大,控制量的调整越缓慢。
微分项(Derivative)是根据误差的变化率进行计算的,它可以预测误差的未来变化趋势,并提前调整控制量。微分项越大,控制量的调整越灵敏。
PID算法的最终控制量是比例项、积分项和微分项的加权叠加,其中比例系数、积分系数和微分系数可以根据实际需求进行调整,以达到最佳的控制效果。
理想的PID控制算法:
• Kp —— 比例增益, Kp 与比例度成倒数关系
• Tt —— 积分时间常数
• TD —— 微分时间常数
• u(t)—— PID 控制器的输出信号
• e(t)—— 给定值 r(t)与测量值误差

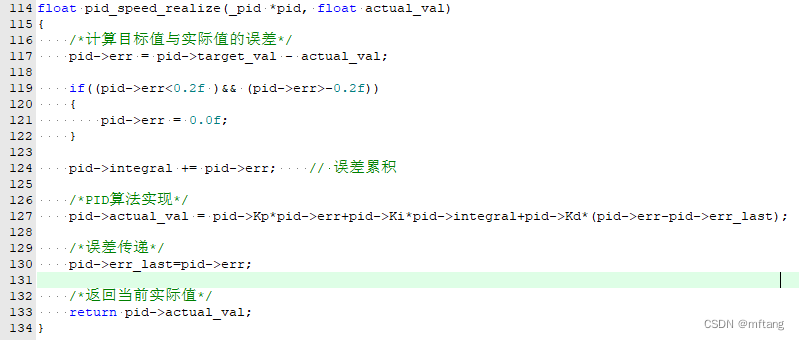
3.2 代码实现
代码117行: 计算目标值与实际值的误差
代码124行:累计误差值
代码127行:实现PID的功能
代码130行: 传递误差值
实际代码:
typedef struct
{
float target_val; //目标值
float actual_val; //实际值
float err; //定义偏差值
float err_last; //定义上一个偏差值
float Kp,Ki,Kd; //定义比例、积分、微分系数
float integral; //定义积分值
}_pid;
/**
* @brief 速度PID算法实现
* @param actual_val:实际值
@note 无
* @retval 通过PID计算后的输出
*/
float pid_speed_realize(_pid *pid, float actual_val)
{
/*计算目标值与实际值的误差*/
pid->err = pid->target_val - actual_val;
if((pid->err<0.2f )&& (pid->err>-0.2f))
{
pid->err = 0.0f;
}
pid->integral += pid->err; // 误差累积
/*PID算法实现*/
pid->actual_val = pid->Kp*pid->err+pid->Ki*pid->integral+pid->Kd*(pid->err-pid->err_last);
/*误差传递*/
pid->err_last=pid->err;
/*返回当前实际值*/
return pid->actual_val;
}4 其他功能实现
4.1 设置电机速度
代码80行: 设置通道1的占空比值
代码81行: 设置通道2的占空比值为0,用于控制方向

实际代码:
void set_motor_speed( uint16_t actual_speed )
{
HAL_TIM_SetPWM_Pulse( actual_speed, TIM_CHANNEL_1);
HAL_TIM_SetPWM_Pulse( 0, TIM_CHANNEL_2);
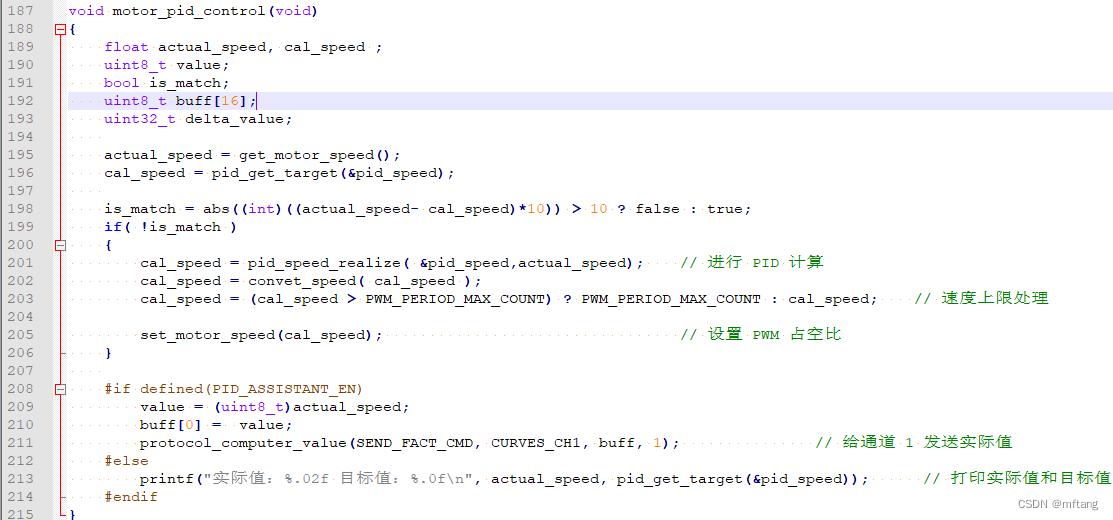
}4.2 PID算法控制电机
代码195行:获取当前电机的转速
代码198行:比较实际值和期望值的差值,便于将实际值控制在一定的范围之内
代码201行:使用实际值进行PID运行,计算出占空比的值,以调节转速
代码205行:设置电机速度
实际代码:
void motor_pid_control(void)
{
float actual_speed, cal_speed ;
uint8_t value;
bool is_match;
uint8_t buff[16];
uint32_t delta_value;
actual_speed = get_motor_speed();
cal_speed = pid_get_target(&pid_speed);
is_match = abs((int)((actual_speed- cal_speed)*10)) > 10 ? false : true;
if( !is_match )
{
cal_speed = pid_speed_realize( &pid_speed,actual_speed); // 进行 PID 计算
cal_speed = convet_speed( cal_speed );
cal_speed = (cal_speed > PWM_PERIOD_MAX_COUNT) ? PWM_PERIOD_MAX_COUNT : cal_speed; // 速度上限处理
set_motor_speed(cal_speed); // 设置 PWM 占空比
}
#if defined(PID_ASSISTANT_EN)
value = (uint8_t)actual_speed;
buff[0] = value;
protocol_computer_value(SEND_FACT_CMD, CURVES_CH1, buff, 1); // 给通道 1 发送实际值
#else
printf("实际值:%.02f 目标值:%.0f\n", actual_speed, pid_get_target(&pid_speed)); // 打印实际值和目标值
#endif
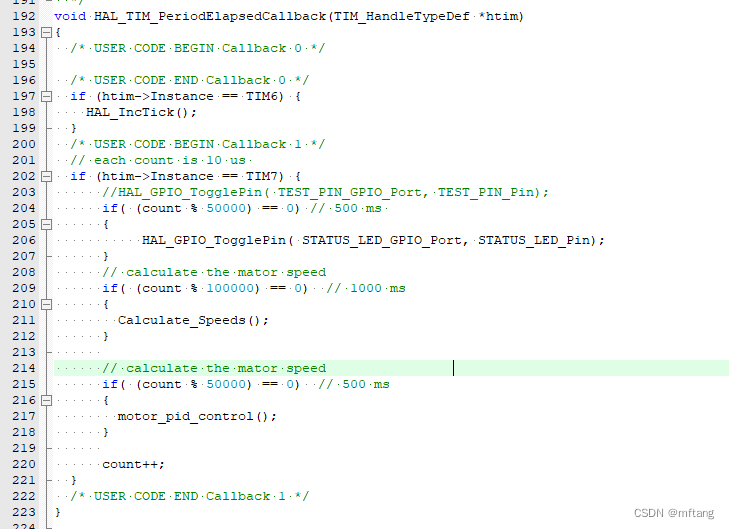
}4.3 功能函数的调用
代码211行:计算电机的转速
代码217行:电机PID控制函数
实际源码:
void motor_pid_control(void)
{
float actual_speed, cal_speed ;
uint8_t value;
bool is_match;
uint8_t buff[16];
uint32_t delta_value;
actual_speed = get_motor_speed();
cal_speed = pid_get_target(&pid_speed);
is_match = abs((int)((actual_speed- cal_speed)*10)) > 10 ? false : true;
if( !is_match )
{
cal_speed = pid_speed_realize( &pid_speed,actual_speed); // 进行 PID 计算
cal_speed = convet_speed( cal_speed );
cal_speed = (cal_speed > PWM_PERIOD_MAX_COUNT) ? PWM_PERIOD_MAX_COUNT : cal_speed; // 速度上限处理
set_motor_speed(cal_speed); // 设置 PWM 占空比
}
#if defined(PID_ASSISTANT_EN)
value = (uint8_t)actual_speed;
buff[0] = value;
protocol_computer_value(SEND_FACT_CMD, CURVES_CH1, buff, 1); // 给通道 1 发送实际值
#else
printf("实际值:%.02f 目标值:%.0f\n", actual_speed, pid_get_target(&pid_speed)); // 打印实际值和目标值
#endif
}5 测试
5.1 测试案例1
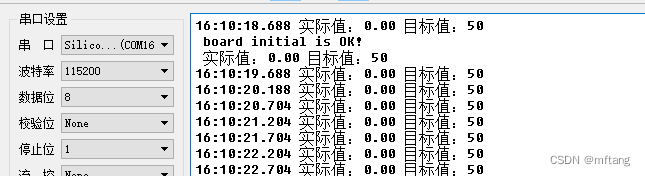
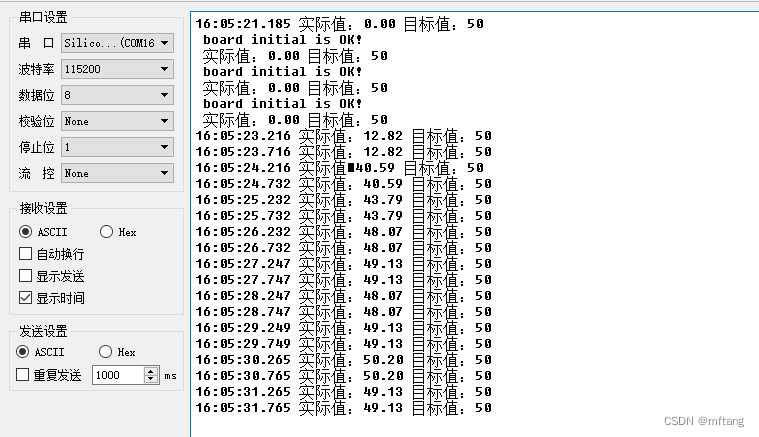
PID参数设置如下类型,观察速度值的变化(Expect value: speed = 50 )
pid_speed.Kp = 7.0;
pid_speed.Ki = 20.0;
pid_speed.Kd = 14.0;串口log如下,在5s左右就完成速度定速功能
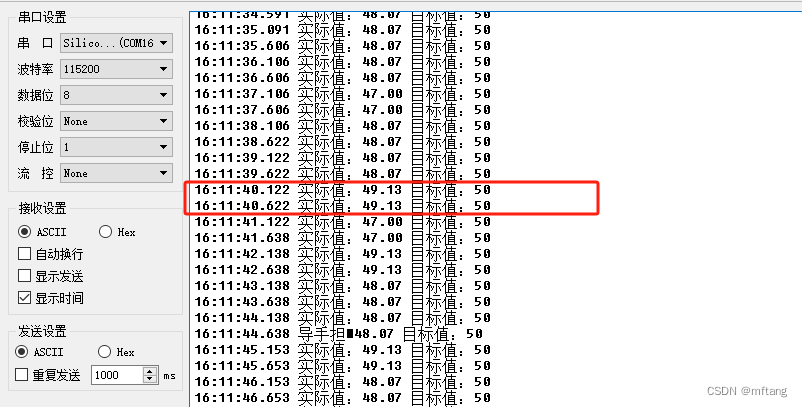
5.2 测试案例2
PID参数设置如下类型,观察速度值的变化(Expect value: speed = 50 )
pid_speed.Kp = 7.0;
pid_speed.Ki = 2.0;
pid_speed.Kd = 4.0;串口log如下,在2min左右才完成速度定速功能