AprilTags

ISAAC教程合集地址
文章目录
- AprilTags
- 源码
- Isaac Codelet
- 运行示例应用程序
- 在主机系统上运行示例应用程序
- 在 Jetson 上运行应用程序
- 在 Websight 中查看应用程序的输出
AprilTags 是一种流行的基准标记形式。 它在机器人技术中有广泛的应用,包括对象跟踪、视觉定位、SLAM 精度评估和人机交互。 Isaac 通过利用 GPU 加速提供实时 AprilTag 检测,同时实现高解码稳健性。
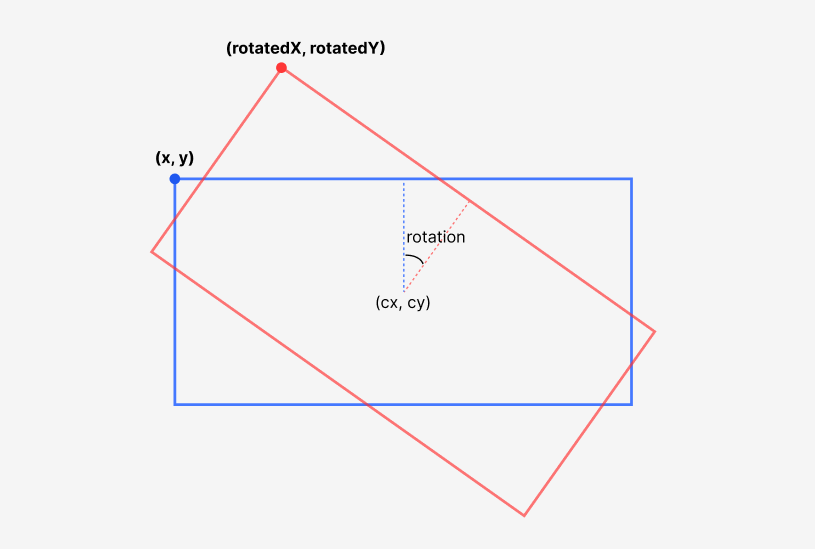
除了检测之外,Isaac 还对所有检测到的标签进行标签姿态估计。 我们根据相机内在参数、标签的大小和标签角的像素坐标计算标签姿势的估计值,返回标签相对于相机的旋转和平移。 具体来说,鉴于以下情况:
-
X 和 Y 中的相机焦距,以像素(每弧度)为单位。
-
相机主点 X 和 Y,以图像中像素 (0,0) 的像素为单位。
-
标记大小 W,其中标记为正方形 W x W,以调用者方便的单位表示。 建议使用米或厘米。
Isaac SDK 返回以下内容:
-
所有检测到的 AprilTag 的标签 ID,格式为
<tagFamily>_<tagID>。 例如,对于标签系列 Tag36h11 和 ID 7,返回的标签 ID 是 tag36h11_7。 -
在 2018.3 版本中,支持 tag36h11 标签系列。 计划在未来的版本中将该算法扩展到其他标签系列。
-
观察到的标签的像素坐标,从左上角开始,依次是右上角、右下角、左下角。
-
表示标签相对于相机框架的方向的四元数; 和
-
一个 3维向量,指示标签中心相对于相机位置的位置,使用与指定标签尺寸相同的单位。
相对于相机的坐标系为:
-
右撇子
-
X轴向右
-
Y轴向上
-
Z轴向内
-
列扫描旋转矩阵,即 X、Y 和 Z 轴的重新映射列表。
该估计的精度与到标签的距离成反比。
源码
Isaac 使用静态库形式的 AprilTags 检测代码。
AprilTags 检测和姿势估计被包装为 Isaac codelet,并且在 Isaac 存储库中可用。
Isaac Codelet
包装 AprilTags 检测的 Isaac codelet 获取输入图像,并发布检测到的标签列表以及标签角的坐标。 它还使用相机内在特性、输入标签大小和检测到的标签的坐标来估计这些标签的姿态。 相对于相机的位置,姿势由四元数和平移向量表示。
运行示例应用程序
AprilTags 示例应用程序使用 Realsense 立体相机。 首先将相机连接到主机系统或您正在使用的 Jetson 平台。 然后使用以下过程之一运行包含的示例应用程序。
在主机系统上运行示例应用程序
- 使用以下命令构建示例应用程序:
bob@desktop:~/isaac/sdk$ bazel build //apps/samples/april_tags
- 使用以下命令运行示例应用程序:
bob@desktop:~/isaac/sdk$ bazel run //apps/samples/april_tags
在 Jetson 上运行应用程序
-
在主机上构建一个包,然后将其部署到 Jetson 系统中。
-
按照应用程序控制台选项中的说明将
//apps/samples/april_tags:april_tags-pkg部署到机器人。 -
登录到 Jetson 系统并使用以下命令运行应用程序:
bob@jetson:~/$ cd deploy/bob/april_tags-pkg
bob@jetson:~/deploy/bob/april_tags-pkg$./apps/samples/april_tags/april_tags
其中“bob”是您在主机系统上的用户名。
在 Websight 中查看应用程序的输出
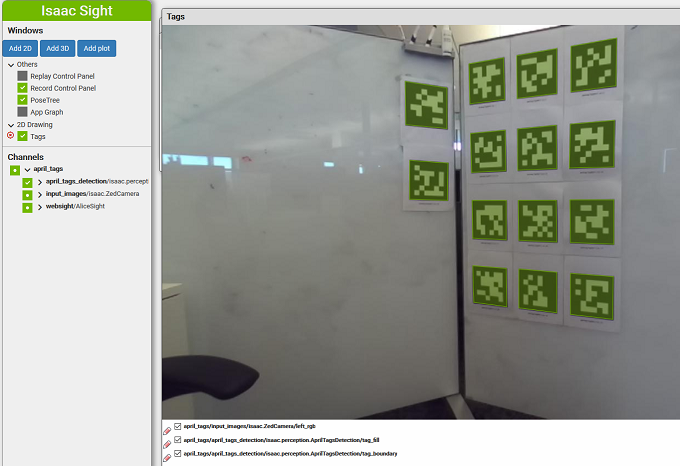
在应用程序运行时,通过导航到 http://localhost:3000 在浏览器中打开 Isaac Sight。 (如果在 Jetson 平台上运行应用程序,请确保使用 Jetson 系统的 IP 地址而不是本地主机。)
在 Websight 中,一个名为 Tags 的窗口显示输入图像,其中一个绿色半透明矩形覆盖在检测到的 AprilTags 之上:
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561