在线性时变系统的PID控制-1的基础上采用S函数进行Simulink仿真。
被控对象的描述方式可变换为:

在S函数中,采用初始化、微分函数和输出函数,即mdllnitializeSizes函数、mdIDerivatives函数和mdlOutputs函数。在初始化中采用sizes结构,选择1个输出。3个输入,3个输入实现了P、I、D三项的输入。S函数嵌入在Simulink程序中。系统初始状态为: x(0)=0,t(0)=0。取kp=10,ki =2,kd=1,仿真结果如图所示。
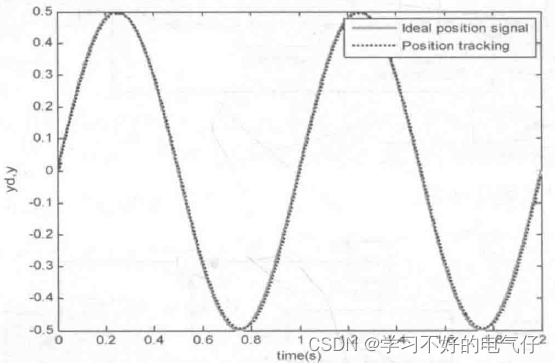
仿真图:
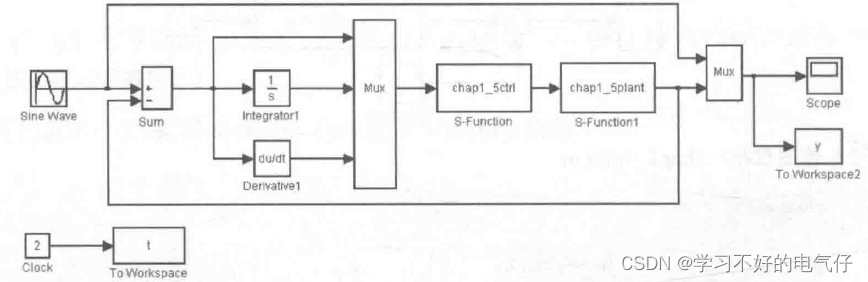
S函数控制器子函数程序:chap1_5ctrl.m
function [sys,x0,str,ts]= spacemodel(t,x.u,flag)
switch flag,
case 0,
[sys,x0,str,ts]-mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case {2,4,9}
sys=[ ];
otherwise
error(['Unhandled flag = ',num2st(flag)]);
end
function[sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates=0;
sizes.NumDiscStates= 0;
sizes.NumOutputs=l;
sizes.NumInputs =3;
sizes.DirFeedthrough=l;
sizes.NumSampleTimes =1;% At least one sample time is needed
sys - simsizes(sizes);
x0=[];
str=[];
ts=[0 0];
function sys=mdlOutputs(t,x,u)
kp=10;
ki=2;
kd=1;
ut=kp*u(1)+ki*u(2)+kd*u(3);
sys(1)=ut;
S函数被控对象子程序:chap1_5plant.m
function [sys,x0,str,ts] = spacemodel(t,x,u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdllnitializeSizes;
case 1,
sys=mdlDerivatives(t.x,u);
case 3,
sys=mdIOutputs(t,x,u);
case {2,4,9}
sys=[];
otherwise
error(['Unhandled flag =' num2str(flag));
end
function [sys,x0,str,ts]=mdllnitializeSizes
sizes= simsizes;
sizes.NumContStates= 2;
sizes.NumDiscStates=0;
sizes.NumOutputs=1;
sizes.NumInputs=1;
sizes.DirFeedthrough=0;
sizes.NumSampleTimes = l; % At least one sample time is needed
sys = simsizes(sizes);
x0=[0;0];
str=[];ts =[0 0];
function sys=mdlDerivatives(t,x,u) %Time-varying model
ut= u(1);
J=20+10*sin(6*pi*t);
K=400+300*sin(2*pi*t);sys( 1)-x(2);
sys(2)=-J*x(2)+K*ut;
function sys=mdlOutputs(t,x,u)
sys(1)=x(1);
作图程序:
close all;
plot(ty(:,1),t,ty(:,2),'k:' linewidth’,2);
xlabel('time(s));ylabel('yd,y');
legend('Ideal position signal','Position tracking');s
通过本实例的仿真可见,采用S函数,很容易地表示复杂的被控对象及控制算法,特别适合于复杂控制系统的仿真。

![[经典的图像warping方法] Thin Plate Spline: TPS理论和代码详解](https://img-blog.csdnimg.cn/9473ab13803d486f8cf510afff333fd0.png)



![SAPIEN PrimalSQL 2023.1[x64] Crack](https://img-blog.csdnimg.cn/d15737840f144b6798e9c2d6b1bfd54a.png)