Introduction to Multi-Armed Bandits——03 Thompson Sampling[1]
参考资料
-
Russo D J, Van Roy B, Kazerouni A, et al. A tutorial on thompson sampling[J]. Foundations and Trends® in Machine Learning, 2018, 11(1): 1-96.
-
ts_tutorial
-
在线学习(MAB)与强化学习(RL)[4]:贝叶斯Bandit算法
项目代码地址: https://github.com/yijunquan-afk/bandit-learning.git
一、 Greedy Decisions
在第二节中,介绍过贪心算法,其选择动作(action)的两个步骤为:
-
从历史数据中估计一个模型
-
选择对估计的模型来说是最优的动作。
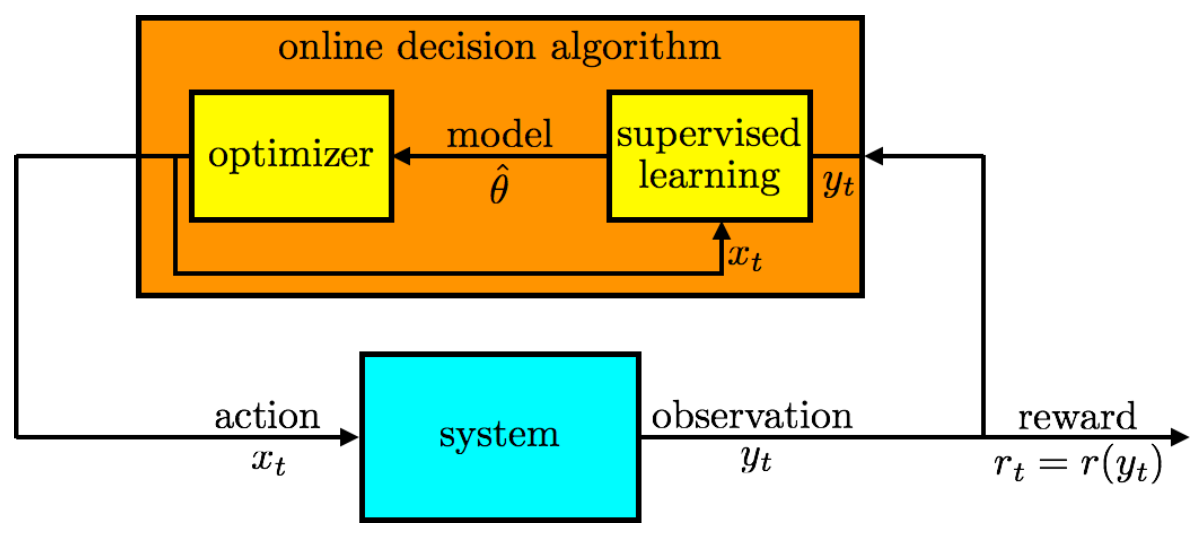
贪心方法的一个缺点是它没有积极探索,这可能会降低性能。以Bernoulli bandit为例, observation 是 reward,所以
r
t
=
r
(
y
t
)
=
y
t
r_t = r(y_t) = y_t
rt=r(yt)=yt。 在每轮
t
t
t ,将产生对每个
k
k
k 个动作的平均奖励的估计值
θ
^
k
\hat{\theta}_k
θ^k,然后选择使这些估计值最大的动作。
我们再用具体的例子进行说明。假设有三个动作(臂),其平均奖励率为 θ ∈ R 3 \theta \in \mathbb{R}^3 θ∈R3 。 特别是,每次臂 k k k 被选中,就会以 θ k \theta_k θk 的概率产生 1 1 1 的奖励,否则奖励为0。 算法事先是不知道 θ \theta θ 的值,需要不断观察样本去估计 θ \theta θ。
下图为概率密度函数。这些分布代表了在智能体(agent)分别尝试了动作1和2一千次,动作3三次,获得了累计奖励分别为600、400和1,并将这些观察结果与每个动作的平均奖励的统一先验分布综合起来。智能体确信动作1和动作2的平均奖励接近于他们的期望值,即大约 0.6 0.6 0.6 和 0.4 0.4 0.4 ,但是对动作3的平均奖励非常不确定。
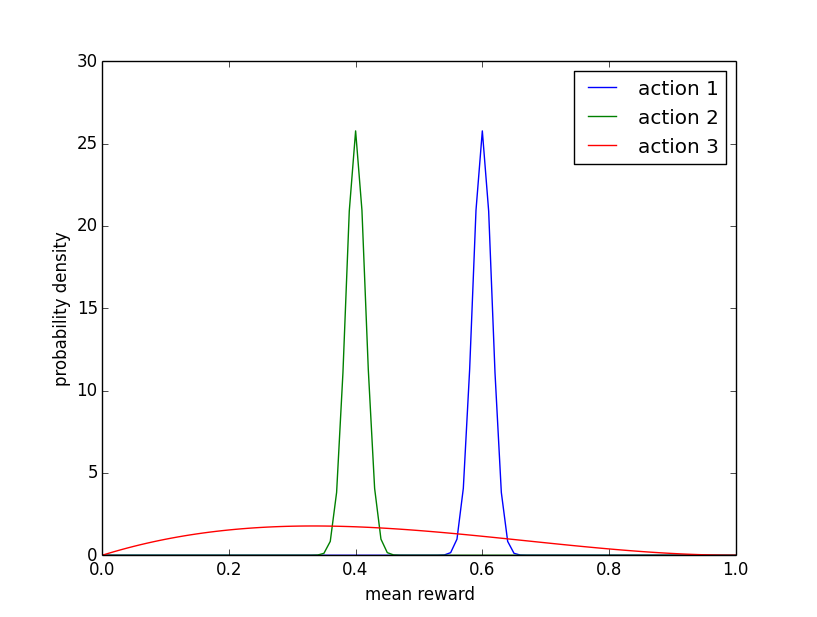
因此,对于动作1和动作2我们已经得到了较多的数据,对其分布估计较为准确,所以从贪心的角度考虑,应该抛弃动作2,因为 θ 2 > θ 1 \theta_2 > \theta_1 θ2>θ1 的可能性极小。而由于动作3的数据较少,按理来说应该再尝试多几次,但是贪心算法不可能会这么做,该算法没有考虑到到平均奖励的不确定性。
Dithering(抖动)是一种常见的探索方法,它通过随机扰动动作来操作贪心算法。其中一个典型的算法就是
E
p
s
i
l
o
n
−
g
r
e
e
d
y
Epsilon-greedy
Epsilon−greedy 算法,上一节说明过。尽管这种形式的探索相对于纯粹的贪心方法可以改善动作,但由于没有 “注销” 动作而浪费了资源。以上图为例,动作2几乎没有机会成为最优选择,因此不值得进行实验,而动作3的不确定性则值得探索。
E
p
s
i
l
o
n
−
g
r
e
e
d
y
Epsilon-greedy
Epsilon−greedy 探索将为每个动作分配同等数量的实验,会浪费掉许多实验。1933年提出的汤普森(Thompson Sampling)抽样提供了一个替代抖动的方法,可以更明智地分配探索。
二、Thompson Sampling for the Bernoulli Bandit
2.1 Beta-Bernoulli Bandit
假设有 K K K 的动作,并且在执行时,任何动作都会成功或失败。当进行游戏时,动作 k ∈ { 1 , ⋯ , K } k\in \{1,\cdots,K\} k∈{1,⋯,K} 产生一个概率为 θ k \theta_k θk的1奖励和一个概率为 1 − θ k 1-\theta_k 1−θk 的零奖励。 动作 k ∈ { 1 , ⋯ , K } k\in \{1,\cdots,K\} k∈{1,⋯,K} 成功的概率为 θ k ∈ [ 0 , 1 ] \theta_k\in[0,1] θk∈[0,1]。成功概率 ( θ 1 , . . . , θ K ) (\theta_1,...,\theta_K) (θ1,...,θK)对智能体来说是未知的,但随着时间的推移是固定的,因此可以通过实验学习。在第一个阶段,一个动作 x 1 x_1 x1 被应用,奖励 r 1 ∈ { 0 , 1 } r_1 \in \{0,1\} r1∈{0,1} 以成功概率 P ( r 1 = 1 ∣ x 1 , θ ) = θ x 1 \mathbb{P}(r_1=1 | x_1, \theta) = \theta_{x_1} P(r1=1∣x1,θ)=θx1 产生。 在观察到 r 1 r_1 r1 之后,算法应用另一个动作 x 2 x_2 x2,观察到奖励 r 2 r_2 r2 ,不断进行。
对于每个 θ k \theta_k θk 都有一个先验分布,在Beta-Bernoulli Bandit中,这些先验分布是 beta 分布。参数为 α = ( α 1 , … , α K ) \alpha = (\alpha_1,\ldots,\alpha_K) α=(α1,…,αK) 和 β ∈ ( β 1 , … , β K ) \beta \in (\beta_1,\ldots,\beta_K) β∈(β1,…,βK)。对于每个动作 k k k , θ k \theta_k θk 先验概率密度函数为:
p ( θ k ) = Γ ( α k + β k ) Γ ( α k ) Γ ( β k ) θ k α k − 1 ( 1 − θ k ) β k − 1 p(\theta_k) = \frac{\Gamma(\alpha_k+\beta_k)}{\Gamma(\alpha_k)\Gamma(\beta_k)} \theta_k^{\alpha_k-1} (1-\theta_k)^{\beta_k-1} p(θk)=Γ(αk)Γ(βk)Γ(αk+βk)θkαk−1(1−θk)βk−1
其中 Γ \Gamma Γ 代表 gamma 函数。随着观察结果的收集,分布会根据贝叶斯规则进行更新。由于beta分布的共轭特性,用它来工作特别方便。特别是,每个动作的后验分布也是带有参数的 beta分布,可以根据一个简单的规则进行更新:
( α k , β k ) ← { ( α k , β k ) if x t ≠ k ( α k , β k ) + ( r t , 1 − r t ) if x t = k . \begin{aligned} (\alpha_k, \beta_k) &\leftarrow \begin{cases} (\alpha_k, \beta_k) & \text{if } x_t \neq k \\ (\alpha_k, \beta_k)+(r_t, 1-r_t) & \text{if } x_t =k. \end{cases} \end{aligned} (αk,βk)←{(αk,βk)(αk,βk)+(rt,1−rt)if xt=kif xt=k.
即如果我们选择了臂 k k k ,如果得到奖励为1则将相应的 α k \alpha_k αk +1( β k \beta_k βk 不变),否则将相应的 β k \beta_k βk +1( α k \alpha_k αk不变)。
对于 α k = β k = 1 \alpha_k=\beta_k=1 αk=βk=1的特殊情况,先验 p ( θ k ) p(\theta_k) p(θk) 在 [ 0 , 1 ] [0,1] [0,1]上是均匀的。只有选定的动作的参数被更新。一个参数为 ( α k , β k ) (\alpha_k,\beta_k) (αk,βk) 的 β分布,其平均值为 α k / ( α k + β k ) \alpha_k/(\alpha_k + \beta_k) αk/(αk+βk) , 随着 α k + β k \alpha_k+ β_k αk+βk 的增长,分布变得更加集中。当 α k \alpha_k αk 相较于 β k \beta_k βk 比较大时,平均值比较大,图像右倾,反之左倾,如上图所示。动作1的分布是 b e t a ( 601 , 401 ) beta(601,401) beta(601,401),动作2的分布是 b e t a ( 401 , 601 ) beta(401, 601) beta(401,601),动作3的分布是 b e t a ( 2 , 3 ) beta(2, 3) beta(2,3),也可以看出来动作3的试验次数较少。
2.2 算法思路
在Beta Bernoulli Bandit情形下,贪心算法的伪代码如下:

在每个时间段 t t t,算法产生一个估计值 θ ^ k = α k / ( α k + β k ) \hat{\theta}_k = \alpha_k/(\alpha_k+\beta_k) θ^k=αk/(αk+βk),等于其当前对成功概率 θ k \theta_k θk的期望。 然后,使 θ ^ k \hat{\theta}_k θ^k 最大的动作 x t x_t xt被应用,在这之后得到奖励 r t r_t rt,分布参数 α x t \alpha_{x_t} αxt和 β x t \beta_{x_t} βxt被更新。
我们再来看看汤普森抽样,其伪代码如下:

与贪心算法类似,唯一的区别是,成功概率估计值 θ ^ k \hat{\theta}_k θ^k 是从后验分布中随机抽取的,后验分布是一个参数为 α k \alpha_k αk 和 β k \beta_k βk 的 β分布,而不是取期望值 α k / ( α k + β k ) \alpha_k / (\alpha_k+\beta_k) αk/(αk+βk)。
让我们来看看汤普森采样是如何改进贪心算法的,回到之前三个臂的例子。在这种情况下,贪心算法将放弃学习动作3的潜在宝贵机会。在抖动(dithering)的情况下,尽管探索动作2几乎是徒劳无功的(因为动作2极不可能是最优的),但是探索动作2和3的机会是相等的。而汤普森采样算法会对动作1、2、3进行采样,其概率分别约等于
0.82
0.82
0.82 、
0
0
0 和
0.18
0.18
0.18 。 分别该动作抽取的随机估计值超过为其他动作抽取的估计值的概率,等于相应动作是最优的概率。 TS算法会天然同时完成explore和exploit,因为如果一个臂没怎么被选择,那么从这个臂中采样得到的
θ
^
k
\hat{\theta}_k
θ^k 会以近似均匀的概率落在整个区间上(相当于uniform exploration)。而一个臂如果被选择的次数多了,那么自然估计的就比较准了,如果这个臂比较“好”,则从它的后验分布里采样出来的就有大概率是比较高的,这个臂也就比较容易会被exploit。
2.3 python实现与实验结果分析
首先实现两个智能体智能体(agent)——BernoulliBanditEpsilonGreedy和BernoulliBanditTS,其中epsilon-greedy的epsilon设置为0就为纯粹的贪心算法。两个智能体之间的区别只在pick_action方法的实现上。
import numpy as np
def random_argmax(vector):
"""选择vector中的最大值的下标,如果有多个最大,则随机选择其中一个"""
index = np.random.choice(np.where(vector == vector.max())[0])
return index
class BernoulliBanditEpsilonGreedy():
"""Bernoulli Bandit问题中使用ε-greedy算法"""
def __init__(self, n_arm, a0=1, b0=1, epsilon=0.0):
self.n_arm = n_arm
self.epsilon = epsilon
self.prior_success = np.array([a0 for arm in range(n_arm)])
self.prior_failure = np.array([b0 for arm in range(n_arm)])
def set_prior(self, prior_success, prior_failure):
# 修改默认先验值
self.prior_success = np.array(prior_success)
self.prior_failure = np.array(prior_failure)
def get_posterior_mean(self):
# 由beta分布的α和β可知beta分布的期望为 α /(α+β)
return self.prior_success / (self.prior_success + self.prior_failure)
def get_posterior_sample(self):
# 从后验抽样
return np.random.beta(self.prior_success, self.prior_failure)
def update_observation(self, observation, action, reward):
# 简单检查与环境的兼容性
assert observation == self.n_arm
if np.isclose(reward, 1):
self.prior_success[action] += 1
elif np.isclose(reward, 0):
self.prior_failure[action] += 1
else:
raise ValueError('Rewards should be 0 or 1 in Bernoulli Bandit')
def pick_action(self, observation):
if np.random.rand() < self.epsilon:
# 随机探索
action = np.random.randint(self.n_arm)
else:
# 从后验分布中选取一个均值最大的臂
posterior_means = self.get_posterior_mean()
action = random_argmax(posterior_means)
return action
class BernoulliBanditTS(BernoulliBanditEpsilonGreedy):
def pick_action(self, observation):
"""汤普森抽样"""
sampled_means = self.get_posterior_sample()
action = random_argmax(sampled_means)
return action
然后实现环境(environment):
class BernoulliBandit():
"""Bernoulli Bandits"""
def __init__(self, probs):
"""
probs: 每个臂的奖励概率
optimal_reward: 最大奖励值
n_arm: 臂的数目
"""
self.probs = np.array(probs)
self.optimal_reward = np.max(self.probs)
self.n_arm = len(self.probs)
def get_observation(self):
return self.n_arm
def get_optimal_reward(self):
return self.optimal_reward
def get_expected_reward(self, action):
return self.probs[action]
def get_stochastic_reward(self, action):
# 重复伯努利试验,产生0/1的奖励
return np.random.binomial(1, self.probs[action])
def advance(self, action, reward):
"""Updating the environment (useful for nonstationary bandit)."""
pass
然后设计实验方法(experiment):
import numpy as np
import pandas as pd
class BaseExperiment(object):
"""基础实验:记录悔值(regret和采取的动作(action)
"""
def __init__(self, agent, environment, n_steps,
seed=0, unique_id='NULL'):
"""
agent: 智能体
environment: 环境
n_steps: 迭代次数
seed: 随机数种子
unique_id: 标识实验
results: 实验结果
"""
self.agent = agent
self.environment = environment
self.n_steps = n_steps
self.seed = seed
self.unique_id = unique_id
self.results = []
self.data_dict = {}
def run_step_maybe_log(self, t):
# 观察环境,选择臂
observation = self.environment.get_observation()
action = self.agent.pick_action(observation)
# 计算有用的值
optimal_reward = self.environment.get_optimal_reward()
expected_reward = self.environment.get_expected_reward(action)
reward = self.environment.get_stochastic_reward(action)
# 使用获得的奖励和选择的臂更新智能体
self.agent.update_observation(observation, action, reward)
# 记录悔值
instant_regret = optimal_reward - expected_reward
self.cum_regret += instant_regret
# 环境进化(非平稳实验中才会用到)
self.environment.advance(action, reward)
# 记录产生的数据
self.data_dict = {'t': (t + 1),
'instant_regret': instant_regret,
'cum_regret': self.cum_regret,
'action': action,
'unique_id': self.unique_id}
self.results.append(self.data_dict)
def run_experiment(self):
"""运行实验,收集数据"""
np.random.seed(self.seed)
self.cum_regret = 0
self.cum_optimal = 0
for t in range(self.n_steps):
self.run_step_maybe_log(t)
# 使用pandas存储数据
self.results = pd.DataFrame(self.results)
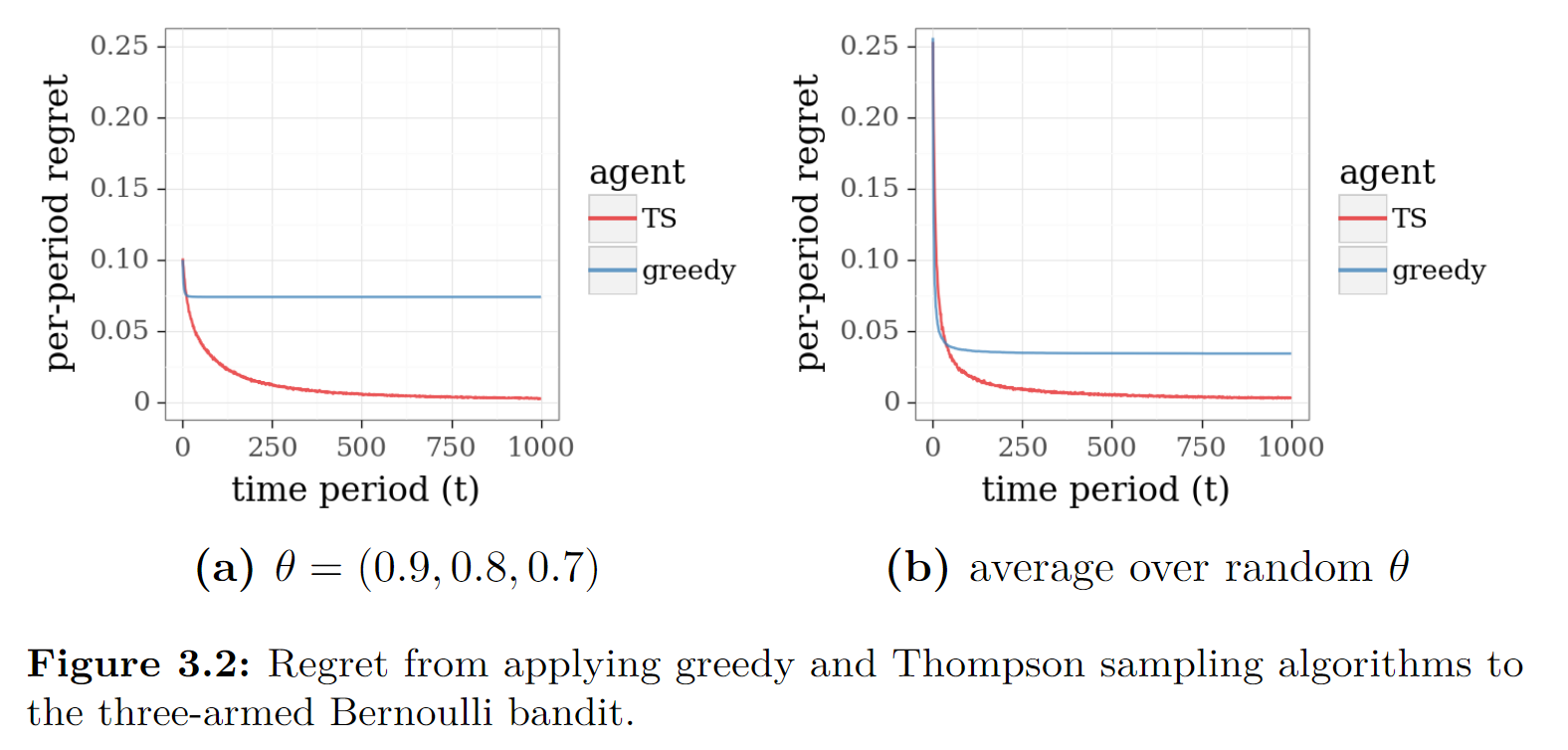
将TS算法与贪心算法的模拟结果进行比较。考虑一个三臂 beta-Bernoulli bandit,其平均奖励为
θ
1
=
0.9
\theta_1=0.9
θ1=0.9,
θ
2
=
0.8
\theta_2=0.8
θ2=0.8, 以及
θ
3
=
0.7
\theta_3=0.7
θ3=0.7。 让每个臂平均奖励的先验分布是均匀的(即beta(1,1))。 下图绘制了基于每种算法的200次独立模拟的结果。每次模拟都是在一千个时间段内进行的。
import plotnine as gg
def plotComparation(algorithm = 'TS'):
probs = [0.9,0.8,0.7]
n_steps = 1000
N_JOBS = 200
results = []
for job_id in range(N_JOBS):
if(algorithm == 'TS'):
agent = BernoulliBanditTS(n_arm=len(probs))
else:
agent = BernoulliBanditEpsilonGreedy(n_arm=len(probs))
env = BernoulliBandit(probs)
experiment = BaseExperiment(
agent, env, n_steps=n_steps, seed=job_id, unique_id=str(job_id))
experiment.run_experiment()
results.append(experiment.results)
df_agent = pd.concat(results)
n_action = np.max(df_agent.action) + 1
plt_data = []
for i in range(n_action):
probs2 = (df_agent.groupby('t') # 按照t分组
.agg({'action': lambda x: np.mean(x == i)}) # 按照action求平均
.rename(columns={'action': 'action_' + str(i + 1)})) # 重命名列
plt_data.append(probs2)
# 重置索引
plt_df = pd.concat(plt_data, axis=1).reset_index()
p = (gg.ggplot(pd.melt(plt_df, id_vars='t'))
+ gg.aes('t', 'value', colour='variable', group='variable')
+ gg.geom_line(size=1.25, alpha=0.75)
+ gg.xlab('time period (t)')
+ gg.ylab('Action probability')
+ gg.ylim(0, 1)
+ gg.scale_colour_brewer(name='Variable', type='qual', palette='Set1'))
print(p)
plotComparation('Greedy')
plotComparation('TS')

 AS
AS
而书中的试验次数达到了10000次,其结果如下:
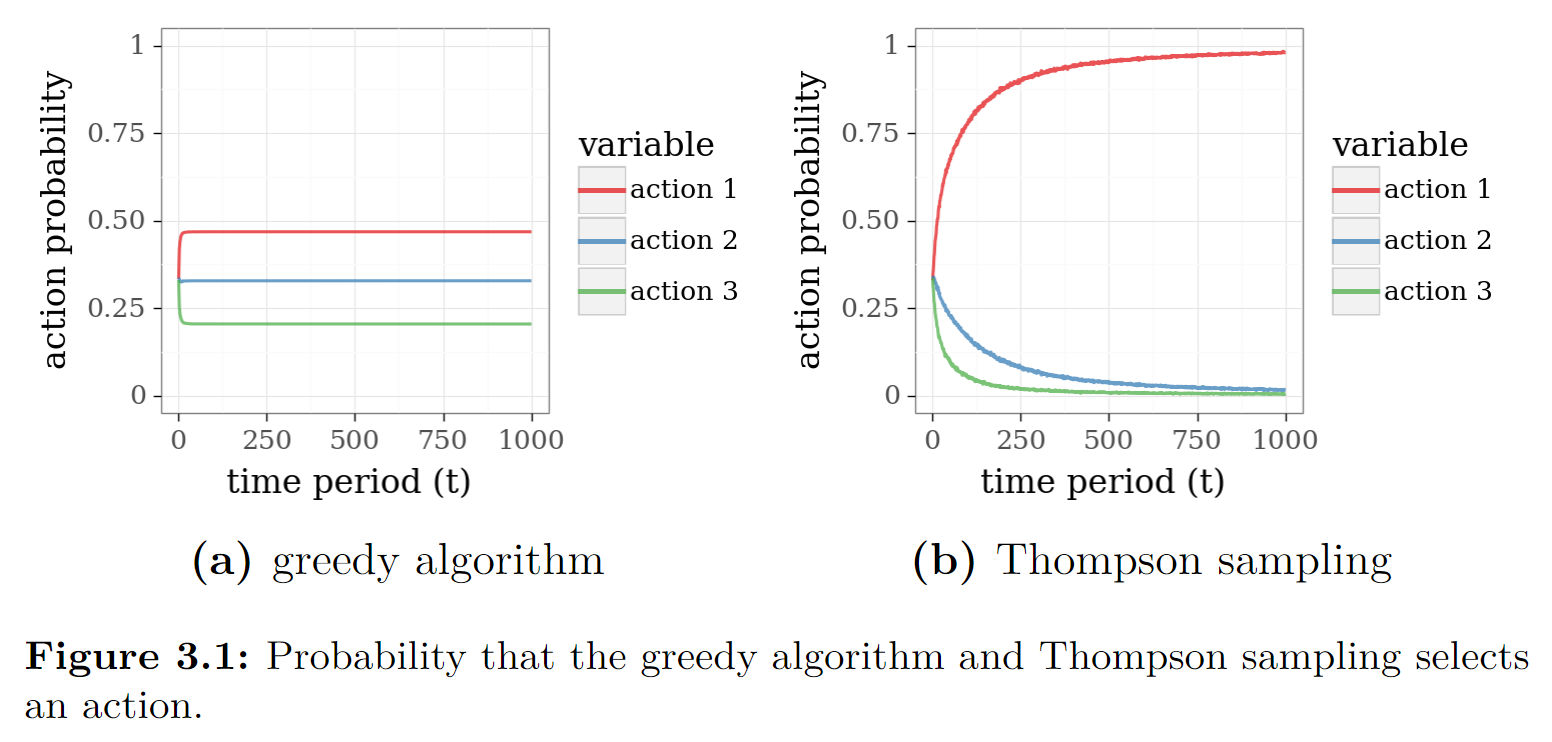
从图中可以看到,贪心算法最后并非收敛到动作1,而是三个动作都有可能选上。TS算法最后收敛到了动作1,即最优动作。
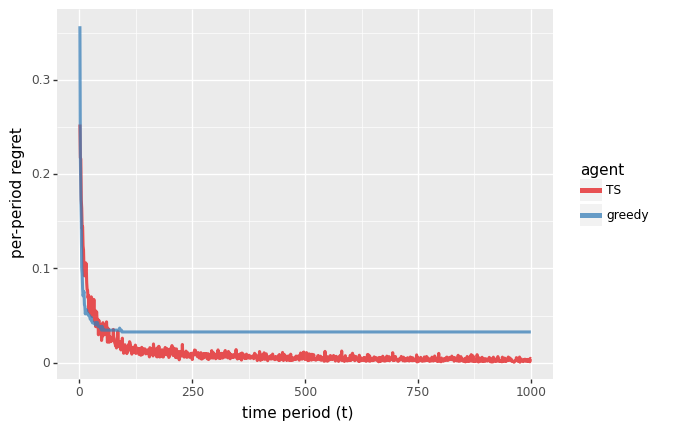
而在线学习通常用悔值图来分析比较,接下来进行实验分析(进行200次实验)。
def plotCompara2():
probs = [0.9,0.8,0.7]
n_steps = 1000
N_JOBS = 200
results1 = []
for job_id in range(N_JOBS):
agent = BernoulliBanditTS(n_arm=len(probs))
env = BernoulliBandit(probs)
experiment = BaseExperiment(
agent, env, n_steps=n_steps, seed=job_id, unique_id=str(job_id))
experiment.run_experiment()
results1.append(experiment.results)
df_agent1 = (pd.concat(results1)).assign(agent='TS')
results2 = []
for job_id in range(N_JOBS):
agent = BernoulliBanditEpsilonGreedy(n_arm=len(probs))
env = BernoulliBandit(probs)
experiment = BaseExperiment(
agent, env, n_steps=n_steps, seed=job_id, unique_id=str(job_id))
experiment.run_experiment()
results2.append(experiment.results)
df_agent2 = (pd.concat(results2)).assign(agent='greedy')
df_agents = pd.concat([df_agent1,df_agent2])
plt_df = (df_agents.groupby(['t','agent'])
.agg({'instant_regret': np.mean})
.reset_index())
p = (gg.ggplot(plt_df)
+ gg.aes('t', 'instant_regret', colour='agent')
+ gg.geom_line(size=1.25, alpha=0.75)
+ gg.xlab('time period (t)')
+ gg.ylab('per-period regret')
+ gg.scale_colour_brewer(name='agent', type='qual', palette='Set1'))
print(p)
plotCompara2()

由上图可知,TS的平均悔值随着时间的推移而消失,而贪婪算法则不是这样的。
如果固定臂产生奖励的概率,那结果将很大程度受到 θ \theta θ 的影响。 因此, θ \theta θ 的选值要足够合理。一个自然的方法是对先验分布中的许多 θ \theta θ 实例进行抽样,并为每个实例生成一个独立的模拟。 下图绘制了200个这样的模拟的平均。
def plotCompara3():
n_steps = 1000
N_JOBS = 200
results1 = []
for job_id in range(N_JOBS):
probs = np.random.rand(3)
agent = BernoulliBanditTS(n_arm=len(probs))
env = BernoulliBandit(probs)
experiment = BaseExperiment(
agent, env, n_steps=n_steps, seed=job_id, unique_id=str(job_id))
experiment.run_experiment()
results1.append(experiment.results)
df_agent1 = (pd.concat(results1)).assign(agent='TS')
results2 = []
for job_id in range(N_JOBS):
agent = BernoulliBanditEpsilonGreedy(n_arm=len(probs))
env = BernoulliBandit(probs)
experiment = BaseExperiment(
agent, env, n_steps=n_steps, seed=job_id, unique_id=str(job_id))
experiment.run_experiment()
results2.append(experiment.results)
df_agent2 = (pd.concat(results2)).assign(agent='greedy')
df_agents = pd.concat([df_agent1,df_agent2])
plt_df = (df_agents.groupby(['t','agent'])
.agg({'instant_regret': np.mean})
.reset_index())
p = (gg.ggplot(plt_df)
+ gg.aes('t', 'instant_regret', colour='agent')
+ gg.geom_line(size=1.25, alpha=0.75)
+ gg.xlab('time period (t)')
+ gg.ylab('per-period regret')
+ gg.scale_colour_brewer(name='agent', type='qual', palette='Set1'))
print(p)
plotCompara3()
书上经过10000次模拟的结果如下,结果类似,只是曲线更为平滑。




![[java/初学者]类的继承](https://img-blog.csdnimg.cn/33e4026791414af3a19fb854600468b5.png)