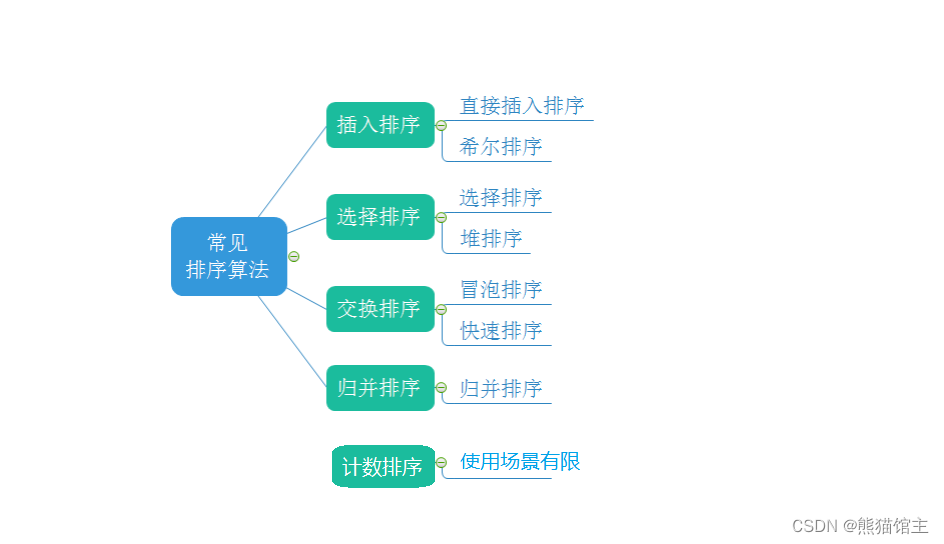
目录:
- 前言
- 算法实现
- (一)插入排序
- 1.直接插入排序
- 2.希尔排序(缩小增量排序)
- (二)选择排序
- 1.选择排序
- 2.堆排序
- (三)交换排序
- 冒泡排序
- 快速排序1(hoare版)
- 快速排序2(挖坑版)
- 快速排序3(前后指针版)
- 优化
- ①三数取中
- ②小区间优化
- 快速排序4(非递归版)
- (四)归并排序
- 递归版
- 非递归版
- (五)计数排序
- 三、性能分析
- 总结
前言
| 打怪升级:第12天 |
|---|
 |
排序:所谓排序,就是使一串记录,根据其中某个或某些关键字的大小,递增或递减地排序起来的操作。
下面在实验中我们使用整形数据来进行操作,并且全部排为升序序列。
算法实现
(一)插入排序
1.直接插入排序
在讲解直接插入排序之前我请大家回想一下,我们大家平时打牌的时候是怎么拼牌的呢?
如果手中有5,6,8,9,那么如果再起到一张7那大多数人都会将7放到6和8之间吧,而这个插入的过程就是我们的直接插入,
当然我们在程序中当然会将细节打磨的更好。
直接插入,到底应该插到那个位置呢?
基本思想
- 将待排序数据(aim)插入到有序序列中;
- 大于aim的数据都往后移;
- 将aim插入到小于等于它的数据之后。
动图模拟
算法实现
// 插入排序 时间复杂度:O(n^2) -- 稳定排序
void InsertSort(int* a, int n)
{
for (int i = 1; i < n; i++) // 需要向前插入的数据下标
{
int aim = a[i]; // 保存目标数据
int j = 0;
for (j = i - 1; j >= 0; j--)
{
if (a[j] > aim) // 如果a[j] 大于 aim, 就将a[j] 向后移动一位
a[j + 1] = a[j];
else // 否则就是找到了目标位置,结束循环
break;
}
// 情况0:第一次就不需要移动,此时aim仍然在原位置,也就是 j+1
a[j + 1] = aim; // 情况1:找到了合适位置:在下标j之后的位置,也就是 j+1
// 情况2:一直循环到 j == -1 的位置,此时应该将aim放到 j = 0 的位置上,也就是 j+1
}
}
算法总结
5. 元素集合越接近有序,直接插入算法时间效率越高
6. 时间复杂度:O(N^2)
7. 空间复杂度:O(1)
8. 稳定性:稳定
2.希尔排序(缩小增量排序)
基本思想
- 选定一个整数gap = n / 2,然后将数据分成gap组;
- 所以间隔为gap的数据分在一组,每组数据进行插入排序(预排序);
- 令gap /= 2,重复上述操作;
- 直到gap=1,此时所有数据分到一组,进行直接插入排序。 (上面所说肯定会让大家有很多疑问,这里说明一点:gap为数据之间的跨度,在直接插入排序中gap就是1,每次都是和前面间隔为1(gap)的数据进行比较,
而希尔排序会先扩大gap的值,这样就可以将数据更快地移动到合适的位置)
动图模拟
如动图所示,刚开始位于第四个位置的数据1如果进行直接插入排序需要进行三次比较才可以移动到最前面,
而我们将gap设为3时,数据1直接与和它前面间隔为3的数据进行比较,只进行一次比较就找到了合适的位置。
算法实现
// 希尔排序 -- 预排序 不稳定排序
void ShellSort(int* a, int n)
{
// 确定跨度
int gap = n / 2; // 也可写作:gap = n/3 + 1; 保证最后gap能够变为1
while (gap >= 1)
{
int k = 0;
while (k < gap)
{
for (int i = gap; i < n; i += gap) // 插入排序
{
int cnt = a[i];
int j = 0;
for (j = i - gap; j >= 0; j -= gap)
{
if (a[j] > cnt)
a[j + gap] = a[j];
else
break;
}
a[j + gap] = cnt;
}
k++;
}
gap /= 2;
}
}
// 由于四层循环不容易控制,这里我们进行了简化,如果大家有兴趣可以画一画图来加深理解
void ShellSort(int* a, int n)
{
// 确定跨度
int gap = n / 2; // 也可写作:gap = n/3 + 1; 保证最后gap能够变为1
while (gap >= 1)
{
// int k = 0;
// while (k < gap) // 可合并化简,省去一层循环(表面上)
// {
// for (int i = gap; i < n; i += gap)
for (int i = gap; i < n; i++)
{
int cnt = a[i];
int j = 0;
for (j = i - gap; j >= 0; j -= gap)
{
if (a[j] > cnt)
a[j + gap] = a[j];
else
break;
}
a[j + gap] = cnt;
}
// k++;
// }
gap /= 2;
}
}
这里我们需要注意:希尔排序只要求我们进行预排序,但是并没有规定应该如何进行预排序,换句话说就是:
gap=n/2 可以, gap=n/4+1 可以,gap=gap-1等等亦可以,也就是说只要能够保证最后gap=1就都是可行的,
因此大家不需要纠结“我们只可以将gap设置为gap=n/2吗”的问题,其实这些在专业领域中也是很有争议的。
也因此:希尔排序的时间复杂度不好计算,因为gap的取值方法很多,导致很难去计算,因此在好些书中给出的
希尔排序的时间复杂度都不固定,这里我们一般取的n^1.3
算法总结
- 时间复杂度:O(N^1.3)
- 空间复杂度:O(1)
- 稳定性:不稳定
(二)选择排序
1.选择排序
基本思想
- 遍历数据,找到最大数,并记录最大数据的下标;
- 将最大值换到最后;
- i++,重复上述操作
动图模拟

算法实现
// 选择排序 - 1 每次选择一个最大数放到最后
void SelectSort(int* a, int n)
{
for (int i = 0; i < n - 1; i++)
{
int sub = 0; // 记录最大值下标
for (int j = 1; j < n - i; j++)
{
if (a[j] > a[sub])
sub = j;
}
Swap(a + sub, a + n - 1 - i);
}
}
// 选择排序 - 2 优化 :一次找两个值
void SelectSort(int* a, int n)
{
for (int i = 0; i < n / 2; i++) // 注意 i ,j 的取值范围的改变
{
int lsub = i; // 最小值下标
int rsub = i; // 最大值下标
for (int j = i + 1; j < n - i; j++)
{
if (a[j] < a[lsub])
lsub = j;
if (a[j] > a[rsub])
rsub = j;
}
if (rsub == i) // 最大值位于第一个位置,那么下面在将最小值换到第一个位置的时候会将最大值换到lsub的位置,
rsub = lsub; // 因此需要更新rsub下标
Swap(a + i, a + lsub); // 交换函数请自行实现
Swap(a + n - 1 - i, a + rsub);
}
}
算法总结
- 无论数据是否有序,选择排序的时间复杂度都为O(N^2),因此在现实生活中很少使用。
- 时间复杂度:O(N^2)
- 空间复杂度:O(1)
- 稳定性:不稳定
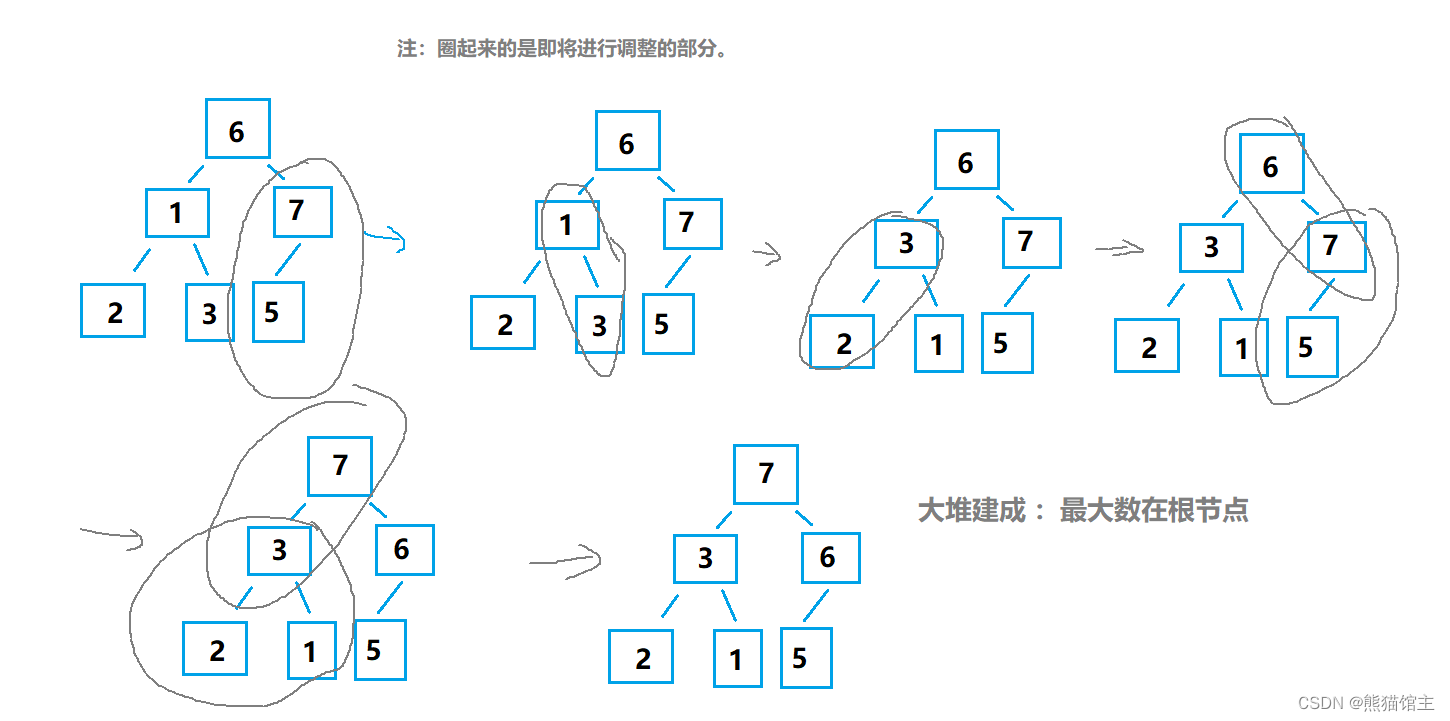
2.堆排序
基本思想
- 利用完全二叉树的特性,每次从最后一个父亲节点开始与孩子节点进行比较,将最大值换到根节点;(向下调整)
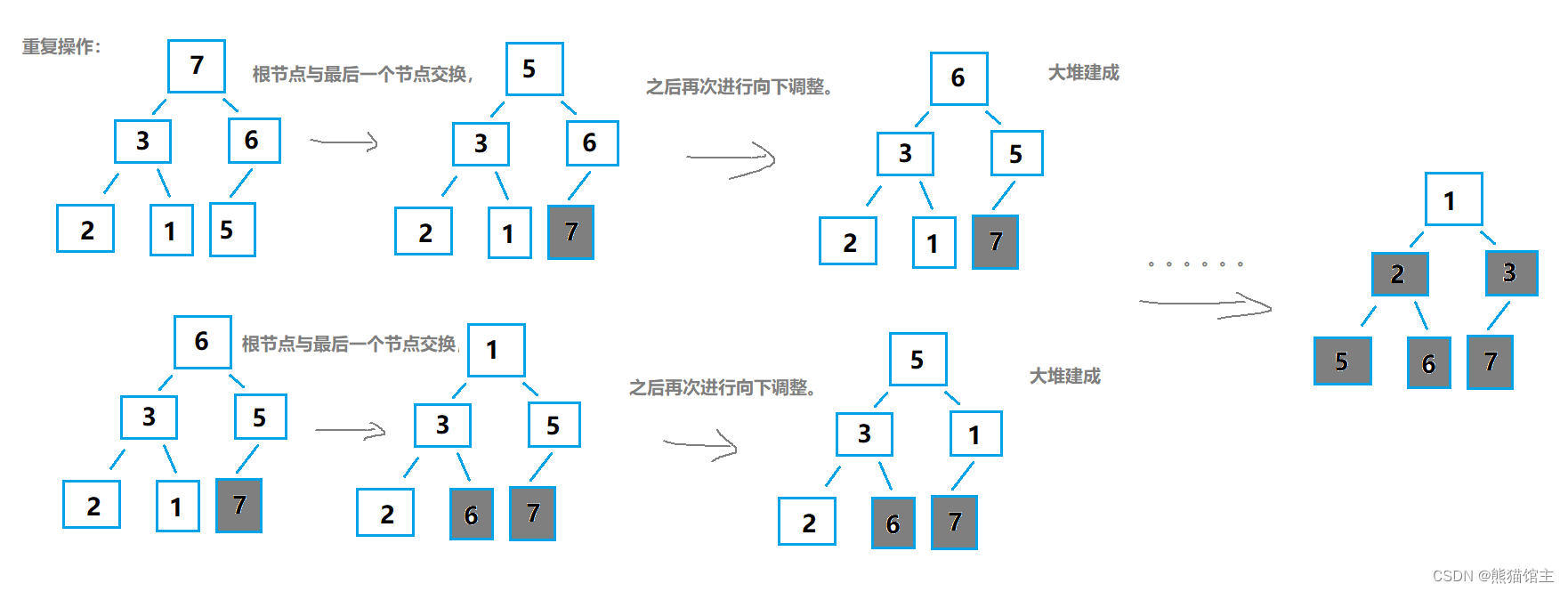
- 将最大值换到最后;
- 经过了上一步的交换,根节点可能已经不是最大值,就需要将根节点从新与孩子节点进行比较,将最大值换到根节点;
- 重复2,3两个步骤。
建堆
算法实现
typedef int HPDaataTyep;
typedef struct Heap
{
HPDaataTyep* a;
int size;
int capacity;
}Heap;
// 堆排序 --升序排序建大堆
void AdjustDown(int* a, int n, int root)
{
int parent = root;
int child = root * 2;
while (child < n)
{
if (child + 1 < n && a[child + 1] > a[child]) // 右孩子存在且更大
child++;
if (a[child] > a[parent]) // 孩子大于双亲--交换
{
Swap(a + child, a + parent);
parent = child;
child = parent * 2;
}
else
{
break;
}
}
}
void HeapSort(int* a, int n)
{
Heap hp;
hp.a = a;
hp.size = hp.capacity = n;
for (int i = n / 2; i >= 0; i--) // 从第一个非叶子节点开始向下调整建堆
{
AdjustDown(a, n, i);
}
while (hp.size > 1) // 取出最大数据,并对第一个数据向下调整
{
Swap(hp.a, hp.a + hp.size - 1);
hp.size--;
AdjustDown(hp.a, hp.size, 0);
}
}
算法总结
- 无论数据是有序无序甚至是全部相同,堆排序都需要进行建堆和调整,因此时间复杂度恒为O(n*logn)
- 时间复杂度:O(n*logn)
- 空间复杂度:O(1)
- 稳定性:不稳定
(三)交换排序
冒泡排序
基本思想
命名来自我们的生活经验:气泡越往上浮就变得越大。
- 从前往后进行遍历,遍历过程中将当前数与后一个数进行比较,将大数交换到后边;
- 如果有n个数据就遍历 n-1次;
- 如果在一轮遍历过程中没有进行交换,说明数据已经有序,可以提前结束排序。
算法实现
// 冒泡排序 -- 两两交换
void BubbleSort(int* a, int n)
{
for (int i = 0; i < n - 1; i++)
{
int aim = 1; // 1为没有进行交换,0为进行了交换
for (int j = 1; j < n - i; j++)
{
if (a[j] < a[j - 1])
{
Swap(a + j, a + j - 1);
aim = 0; // 本轮进行了交换
}
}
if (aim) // 有序就结束
break;
}
}
算法总结
- 冒泡排序的时间复杂度为O(N^2),但是当数据基本有序时采用冒泡排序还是非常快的(接近O(N),但是在平时并不常用,因为插入排序的同样包含这个特性,并且要更好一些)
- 时间复杂度:O(N^2)
- 空间复杂度:O(1)
- 稳定性:稳定
快速排序1(hoare版)
基本思想
动图模拟
算法实现
// 快速排序hoare版本 left 与 right 都为下标
int PartSort1(int* a, int left, int right)
{
int keyi = left; // key值
while (left < right)
{
if (a[right] >= a[keyi])
right--;
else
if (a[left] <= a[keyi])
left++;
if (a[right] < a[keyi] && a[left] > a[keyi])
Swap(a + left, a + right);
}
Swap(a + right, a + keyi); // 将key放到正确的位置
keyi = right;
return keyi;
}
void QuickSort(int* a, int begin, int end)
{
if (end <= begin) // 下标需要合理
return;
int keyi = PartSort1(a, begin, end);
QuickSort(a, begin, keyi - 1); // keyi - 1 有可能 小于 begin,下一个亦然,因此上面需要进行判断
QuickSort(a, keyi + 1, end);
}
算法总结
- 通过类似二分的方式进行递归,每次将一个数据放到它应该在的位置,左边是小于等于x的数据,右边是大于等于x的数据。
- 时间复杂度:O(n * logn)
- 空间复杂度:O(logn) – 递归深度决定
- 稳定性:不稳定
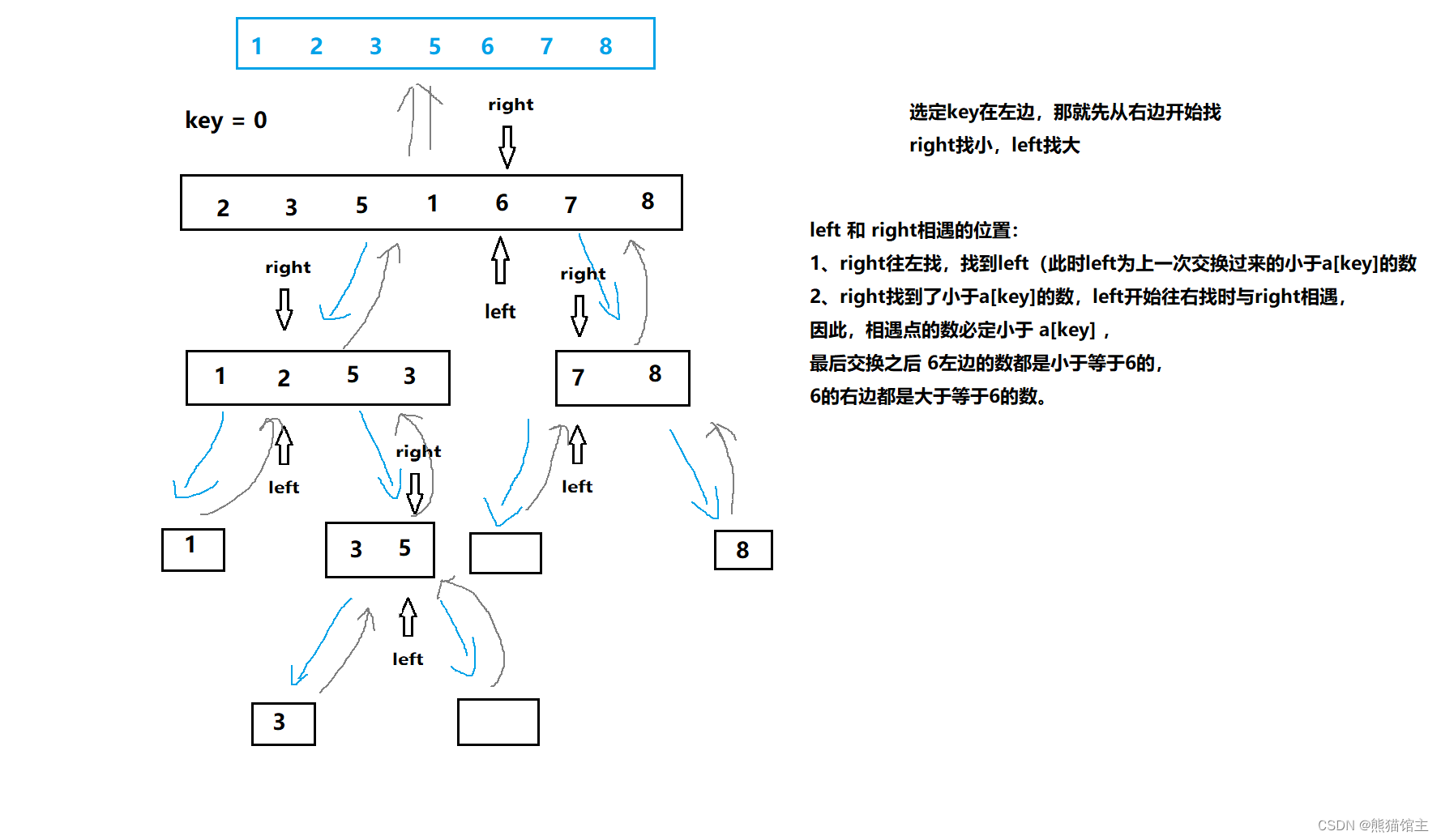
快速排序2(挖坑版)
基本思想
- 选取序列第一个位置为坑位,保留坑位数据作为目标值,保留坑位下标;
- 从右边开始查找,选择小于key值的数据“填坑”,并将原位置作为新的坑位;
- 从左边开始查找,选择大于key值的数据“填坑”,并将原位置作为新的坑位;
- 重复2,3步操作直至两指针相遇,相遇点肯定是坑位,将key填入坑位;
- 此时key左边的都是不大于key值的,右边都是不小于key值的,对左右两边分别重复上述操作。
动图模拟
算法实现
// 快速排序挖坑法
int PartSort2(int* a, int left , int right )
{
int key = a[left ]; // 保留数据,留出坑位
int keyi = left ; // 坑位
while (left < right)
{
while (left < right && a[right] >= key)
right--;
a[keyi] = a[right]; // 执行到这一步的原因:
keyi = right; // 1.找到a[right]<key 2.left == right ,此时相遇在坑位,填不填坑没有影响,因此此处不需要再判断 left < right
while (left < right && a[left] < key) // 不加等号:将相等的数据全部移动到侧
left++;
a[keyi] = a[left];
keyi = left;
}
a[keyi] = key;
return keyi;
}
void QuickSort(int* a, int begin, int end)
{
if (end <= begin) // 下标需要合理
return;
int keyi = PartSort2(a, begin, end);
QuickSort(a, begin, keyi - 1); // keyi - 1 有可能 小于 begin,下一个亦然,因此上面需要进行判断
QuickSort(a, keyi + 1, end);
}
算法总结
- 通过类似二分的方式进行递归,每次将一个数据放到它应该在的位置,左边是小于等于x的数据,右边是大于等于x的数据。
- 时间复杂度:O(n * logn)
- 空间复杂度:O(logn) – 递归深度决定
- 稳定性:不稳定
快速排序3(前后指针版)
基本思想
- 初始化两个指针,一个在起始位置,一个比它前一个位置;
- 如果fast所指数据大于key(keyi所指数据),slow指针不动,slow指针以及它之前的数据都是不大于key的;
- 前面的指针所指数据如果不大于key,并且不等于++slow(说明slow现在所指数据是大于key的)就交换;
- 遍历直到fast大于right;
动图模拟
算法实现
// 快速排序前后指针法
int PartSort3(int* a, int left, int right)
{
int keyi = left; // 对比值
int slow = left;
int fast = left+ 1;
while (++fast <= right) // 取值区间[begin, end]
{
if (a[fast] <= a[keyi] && ++slow != fast)
Swap(a + fast, a + slow);
}
Swap(a + keyi, a + slow); // slow以及它左边的都是小于key值的,右边的都是大于key值的
keyi = slow;
return keyi;
}
void QuickSort(int* a, int begin, int end)
{
if (end <= begin) // 下标需要合理
return;
int keyi = PartSort3(a, begin, end);
QuickSort(a, begin, keyi - 1); // keyi - 1 有可能 小于 begin,下一个亦然,因此上面需要进行判断
QuickSort(a, keyi + 1, end);
}
算法总结
- 通过类似二分的方式进行递归,每次将一个数据放到它应该在的位置,左边是小于等于x的数据,右边是大于等于x的数据。
- 时间复杂度:O(n * logn)
- 空间复杂度:O(logn) – 递归深度决定
- 稳定性:不稳定
优化
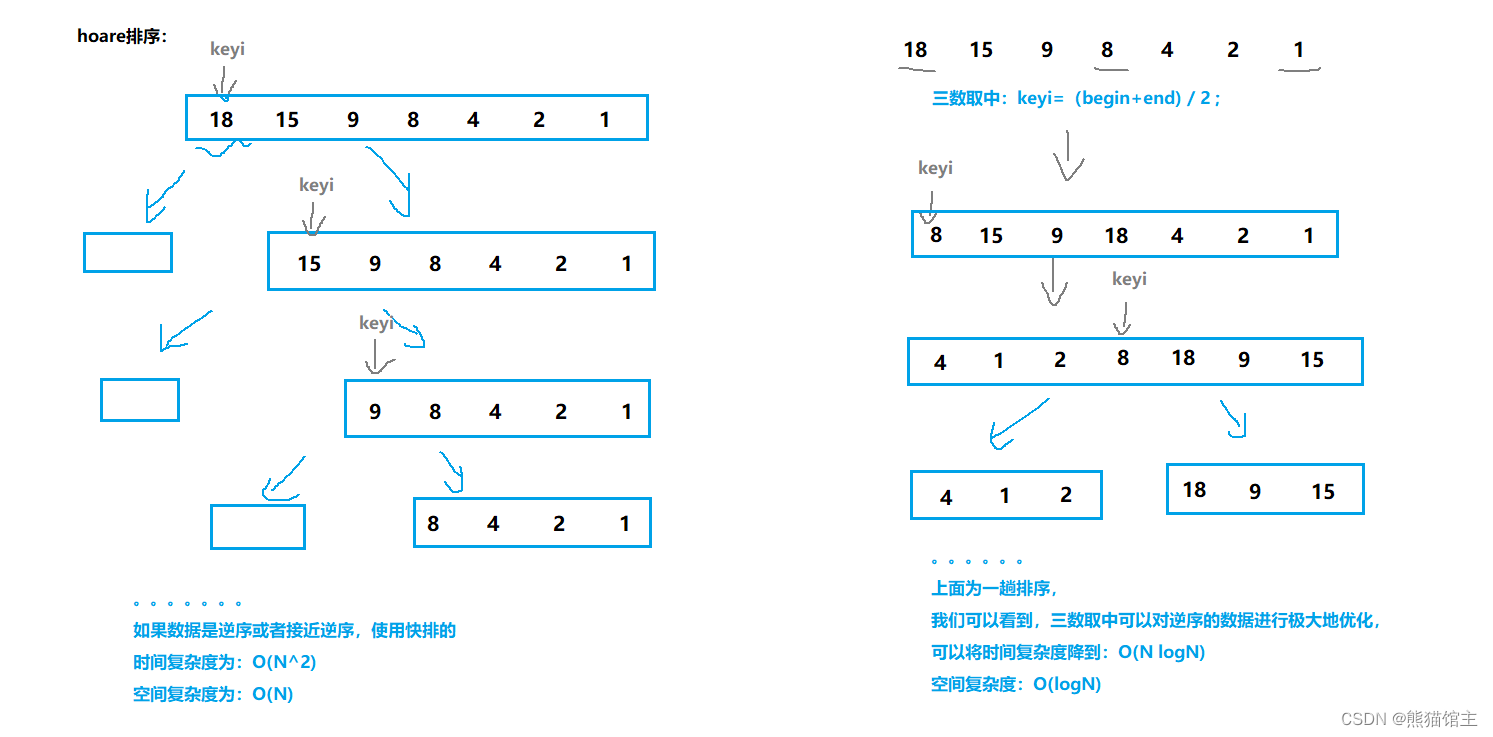
①三数取中
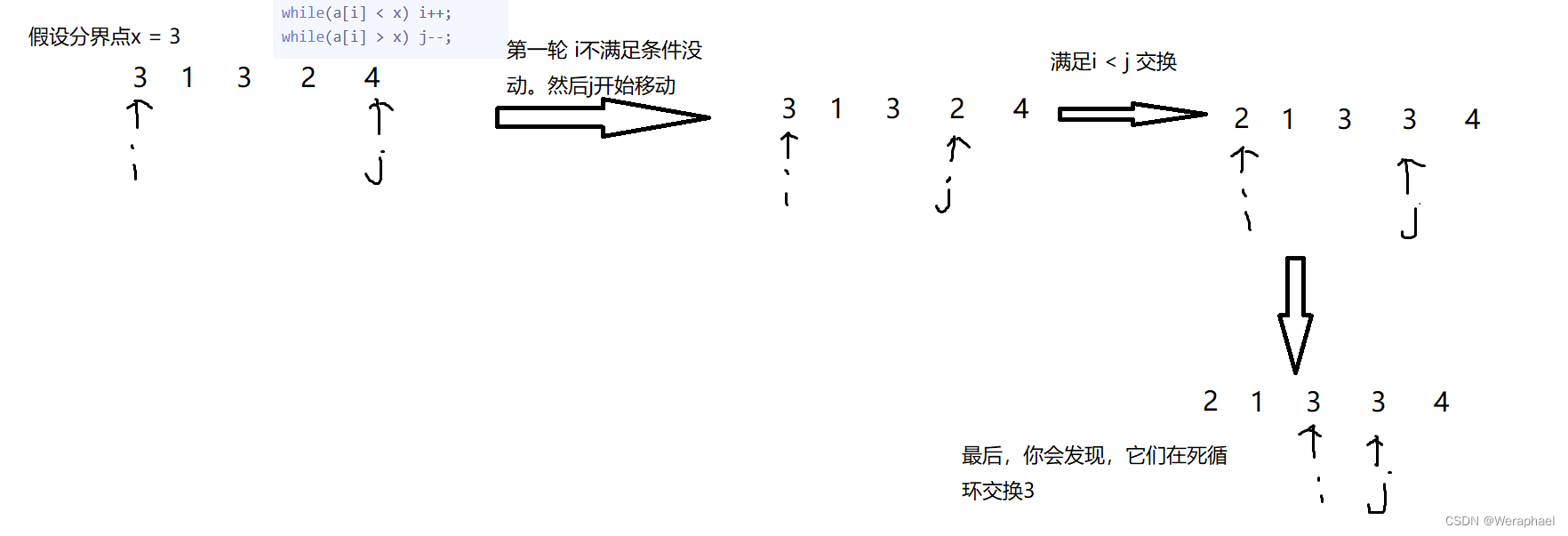
优化原因:如果是逆序序列,使用快排时间复杂度会大大增加。
优化目的:改善对逆序序列的排序(既对降序序列进行升序排序)。
优化方式:
在选择keyi之前,先在区间中对 a[begin] ,a[end],a[(begin+end)/2]三个数进行比较,
选择中间大小的数据作为key值(将它换到begin位置)。
// 优化1.1 -- 三数取中
int GetMidIndex(int* a, int begin, int end)
{
int mid = (begin + end) >> 1;
if (a[begin] > a[mid])
{
if (a[mid] >= a[end])
return mid;
else // a[mid] < a[end]
{
if (a[begin] > a[end])
return end;
else
return begin;
}
}
else // a[begin] <= a[mid]
{
if (a[mid] <= a[end])
return mid;
else // a[mid] > a[end]
{
if (a[begin] > a[end])
return begin;
else
return end;
}
}
}
②小区间优化
优化原因:数据量较小时,使用快排递归次数太多,我们可以使用其他排序进行替代,
这里使用的替代排序可以自行选择。
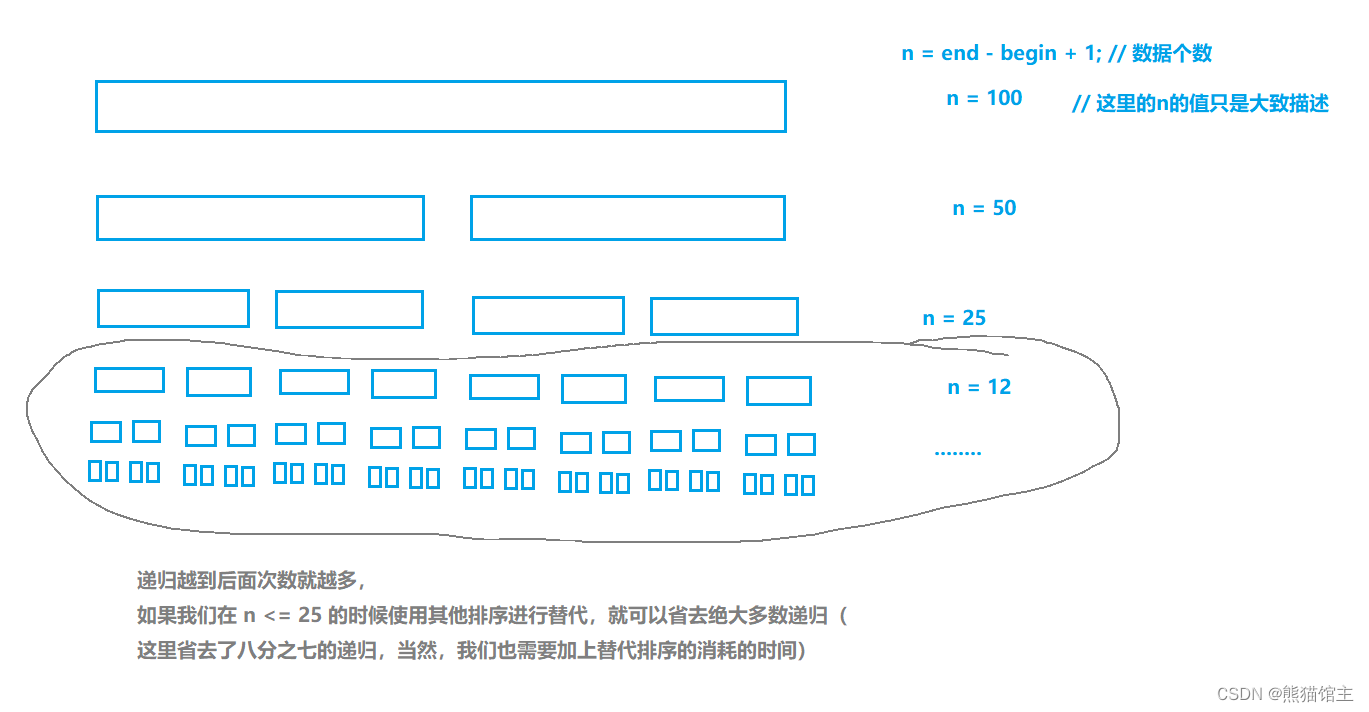
if (st._end - st._begin + 1 <= 25) // 熊猫选择插入排序
InsertSort(a + st._begin, st._end - st._begin + 1);
else
{
。。。。。。。
}
快速排序4(非递归版)
基本思想
借助栈结构(深度优先遍历),将待排序数组区间入栈(也可以使用队列 – 广度优先遍历)。
算法实现
test.h
// 支持动态增长的栈
typedef struct interval
{
int _begin; // 起始和结束位置下标
int _end;
}STDataType;
typedef struct Stack
{
STDataType* _a;
int _top; // 栈顶
int _capacity; // 容量
}Stack;
// 初始化栈
void StackInit(Stack* ps);
// 入栈
void StackPush(Stack* ps, STDataType data);
// 出栈
void StackPop(Stack* ps);
// 获取栈顶元素
STDataType StackTop(Stack* ps);
// 检测栈是否为空,如果为空返回非零结果,如果不为空返回0
bool StackEmpty(Stack* ps);
// 销毁栈
void StackDestroy(Stack* ps);
test.c
// 初始化栈
void StackInit(Stack* ps)
{
assert(ps);
ps->_a = (STDataType*)malloc(sizeof(STDataType) * 3);
ps->_top = 0;
ps->_capacity = 3;
}
// 入栈
void StackPush(Stack* ps, STDataType data)
{
assert(ps);
if (ps->_top == ps->_capacity)
{
STDataType* tmp = realloc(ps->_a, sizeof(STDataType) * ps->_capacity * 2);
assert(tmp);
ps->_a = tmp;
ps->_capacity *= 2;
}
ps->_a[ps->_top++] = data;
}
// 出栈
void StackPop(Stack* ps)
{
assert(ps);
if (StackEmpty(ps))
exit(-1);
ps->_top--;
}
// 获取栈顶元素
STDataType StackTop(Stack* ps)
{
assert(ps);
if (StackEmpty(ps))
exit(-1);
return ps->_a[ps->_top - 1];
}
// 检测栈是否为空,如果为空返回非零结果,如果不为空返回0
bool StackEmpty(Stack* ps)
{
assert(ps);
return ps->_top == 0;
}
// 销毁栈
void StackDestroy(Stack* ps)
{
assert(ps);
free(ps->_a);
ps->_a = NULL;
ps->_top = ps->_capacity = 0;
}
// 快速排序 非递归实现
void QuickSortNonR(int* a, int begin, int end)
{
Stack S;
StackInit(&S);
STDataType st;
st._begin = begin;
st._end = end;
StackPush(&S, st);
while (!StackEmpty(&S))
{
st = StackTop(&S); // 每次取栈顶数据,排序该区间
StackPop(&S);
if (st._end - st._begin + 1 < 15)
InsertSort(a + st._begin, st._end - st._begin + 1);
else
{
int mid = GetMidIndex(a, st._begin, st._end);
Swap(a + st._begin, a + mid);
int keyi = PartSort3(a, st._begin, st._end);
if (keyi - 1 > begin)
{
st._begin = keyi + 1; // 右区间入栈
st._end = st._end;
StackPush(&S, st);
}
if (end > keyi + 1)
{
st._begin = st._begin; // 左区间入栈
st._end = keyi - 1;
StackPush(&S, st);
}
}
}
StackDestroy(&S);
}
算法总结
- 非递归实现避免了数据量过大而导致的栈溢出。
- 时间复杂度:O(N logN)
- 空间复杂度:O(1)
- 稳定性:不稳定
(四)归并排序
递归版
基本思想
- 通过不断递归将数组分为一个个单独的数据;
- 逆向合并数据,单个数据可以看做有序,合并两个有序数组;
- 通过递归的返回,最终可以将所有数据合并为一个有序数组。
- 注意:在合并的时候如果在原数组进行合并可能会覆盖数据,因此需要有一个临时数组存放合并的数据,合并结束后再拷贝回原数组。
动图模拟
算法实现
// 归并排序递归实现 时间复杂度:O(N*logN) 空间复杂度:O(N) -- 分区间操控,
void _MergeSort(int* a, int begin, int end, int* tmp)
{
if (end <= begin)
return;
int mid = (begin + end) / 2; // 将该区间分为两部分继续递归拆分
_MergeSort(a, begin, mid, tmp);
_MergeSort(a, mid + 1, end, tmp);
int left1 = begin, right1 = mid;
int left2 = mid + 1, right2 = end;
int t = 0; // tmp数组下标
while (left1 <= right1 && left2 <= right2) // 合并两个有序数组
{
if (a[left1] <= a[left2])
tmp[t++] = a[left1++];
else
tmp[t++] = a[left2++];
}
while (left1 <= right1)
tmp[t++] = a[left1++];
while (left2 <= right2)
tmp[t++] = a[left2++];
memcpy(a + begin, tmp, sizeof(tmp[0]) * t); // 将排好序的数据拷贝回原数组
}
void MergeSort(int* a, int n)
{
int* tmp = (int*)malloc(sizeof(int) * n);
_MergeSort(a, 0, n - 1, tmp);
free(tmp);
}
算法总结
- 归并排序通过不断二分,时间复杂度为O(NlogN),而且归并排序不受数据的影响,每次都会递归到最后之后合并,不过需要一个辅助数组来存放数据,因此空间复杂度为O(N)。
- 时间复杂度:O(N logN)
- 空间复杂度:O(N)
- 稳定性:稳定
非递归版
基本思想
手动设置排序空间,这里需要注意下标越界情况!!!
算法实现
// 归并排序非递归实现 -- 手动设置排序区间,可以认为是希尔排序的相反思路 -- 熊猫是这么理解的
void MergeSortNonR(int* a, int n)
{
int* tmp = (int*)malloc(sizeof(int) * n);
int range = 1; // 排序区间中元素个数
while (range < n)
{
for (int i = 0; i < n; i += 2 * range)
{
int left1 = i, right1 = left1 + range - 1;
int left2 = i + range, right2 = left2 + range - 1;
int t = 0; // tmp数组下标
// right1 left2 right2 越界
if (right1 >= n)
break;
else
if (left2 >= n)
break;
else
if (right2 >= n)
right2 = n - 1;
while (left1 <= right1 && left2 <= right2) // 合并两个有序数组
{
if (a[left1] <= a[left2])
tmp[t++] = a[left1++];
else
tmp[t++] = a[left2++];
}
while (left1 <= right1)
tmp[t++] = a[left1++];
while (left2 <= right2)
tmp[t++] = a[left2++];
memcpy(a + i, tmp, sizeof(tmp[0]) * t); // 将排好序的数据拷贝回原数组 -- 每次排好序都进行拷贝
}
range *= 2;
}
free(tmp);
}
算法总结
2. 时间复杂度:O(N logN)
3. 空间复杂度:O(N)
4. 稳定性:稳定
(五)计数排序
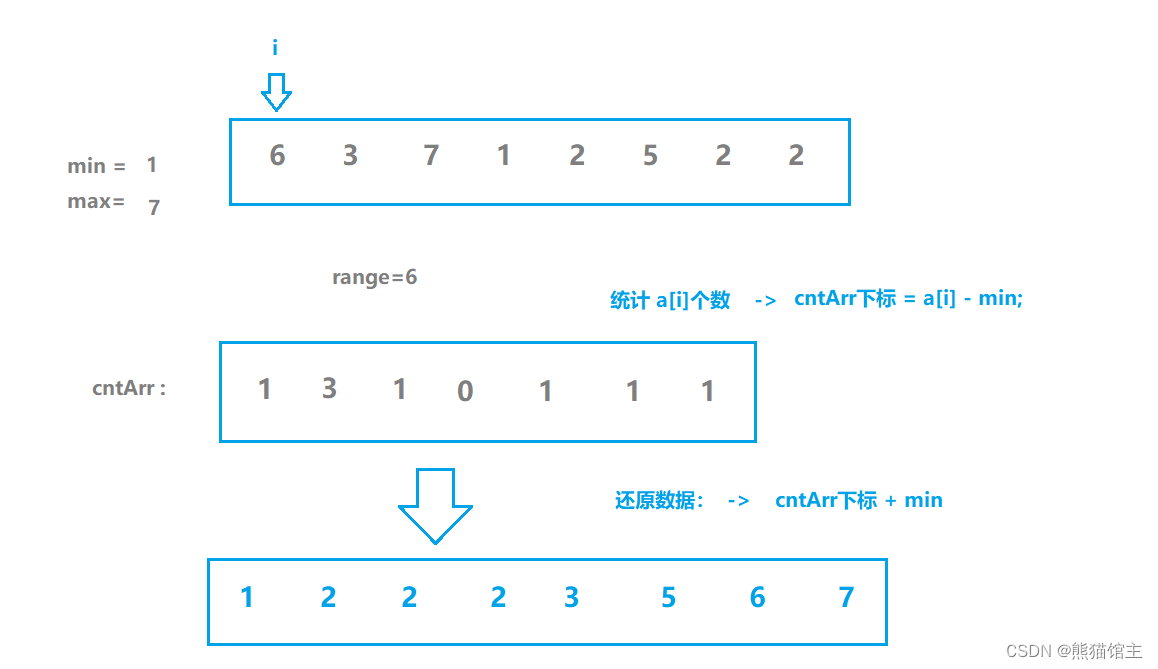
基本思想
不关注数据的值,只关注数据出现的次数。
画图理解
算法实现
// 计数排序
void CountSort(int* a, int n)
{
int max = a[0];
int min = a[0];
for (int i = 1; i < n; ++i)
{
if (a[i] > max)
max = a[i];
if (a[i] < min)
min = a[i];
}
int range = max - min + 1; // 空间区间
int* cntArr = (int*)calloc(range , sizeof(int));
// 最小数 -- d - min 最大数 -- d - min
for (int i = 0; i < n; ++i) // 统计个数
{
++cntArr[a[i] - min];
}
int size = 0; // a数组下标
for (int i = 0; i < range ; ++i) // 导出排序数组
{
while (cntArr[i]--)
{
a[size++] = min + i;
}
}
free(cntArr);
}
算法总结
- 计数排序适合数据集中的数据,并且,计数排序只适用于整形。
- 时间复杂度:O(N+range)
- 空间复杂度:O(range)
- 稳定性:不稳定
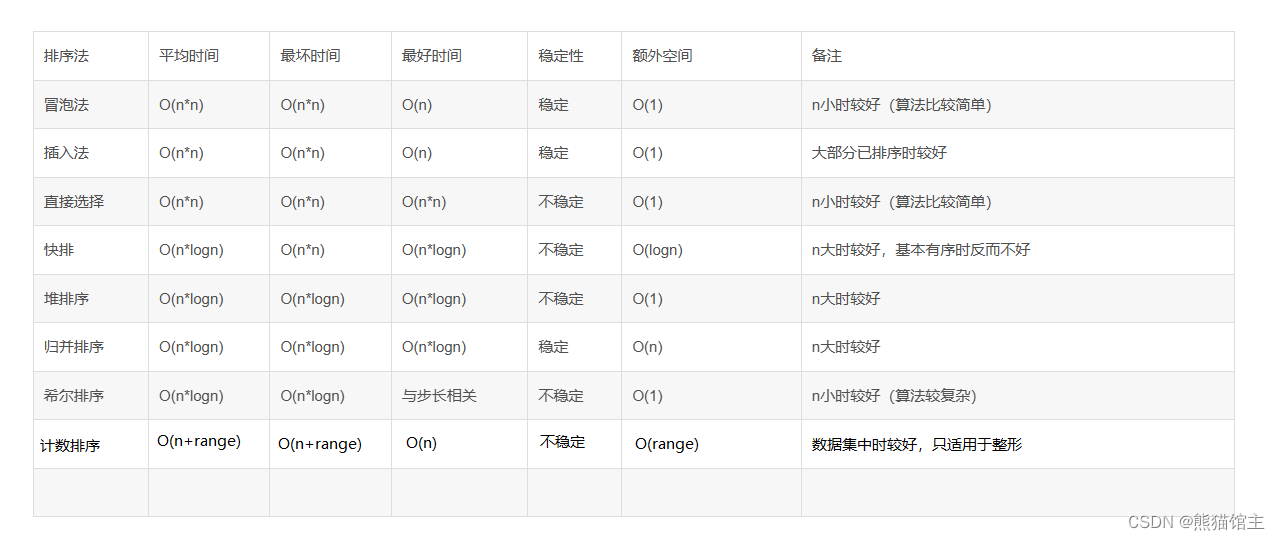
三、性能分析
稳定性:假定在待排序序列中存在多个具有相同关键字的记录,如经过排序后它们的相对位置不变,既a[i] == a[k],
并且a[i]在a[k]之前,排序后a[i]仍然在a[k]之前,就说明排序是稳定的。
上面的插入排序、冒泡排序和归并排序都是稳定排序,因为他们排序时都是两两交换的。
内排序:数据元素全部放在内存中的排序。
外排序:数据元素太多不能全部放到内存,根据排序过程的要求不能在内外存之间移动数据的排序。
总结
以上就是常用的八大排序的全部内容,如果有什么疑问或者建议都可以在评论区留言,感谢大家对 的支持。
的支持。