1.在Anaconda某个环境中安装s2p
pip install s2p2.在Ubuntu系统中安装s2p源代码
git clone https://github.com/centreborelli/s2p.git --recursive
cd s2p
pip install -e ".[test]"3.在s2p中进行make all处理

中间会有很多情况,基本上哪个包出问题就重新pip那个包就行
4.进行make test处理
会在testoutput文件夹中生成output_pair和output_triplet
里面有生成的dsm和各个tile对应的dsm和点云cloud.ply文件

先按照row分行,每个row再有几个col
5.运行测试文件
s2p tests/data/input_pair/config.json
config.json
{
"out_dir" : "../../testoutput/output_pair2",
"images" : [
{"img" : "img_01.tif"},
{"img" : "img_02.tif"}
],
"roi" : {
"x" : 150,
"y" : 150,
"w" : 700,
"h" : 700
},
"full_img": true,
"horizontal_margin": 20,
"vertical_margin": 5,
"tile_size" : 300,
"disp_range_method" : "sift",
"msk_erosion": 0,
"dsm_resolution": 0.5,
"3d_filtering_r": 5,
"3d_filtering_n": 50
}
里面的参数在s2p/config.py中有详细解释
Notice that each input image must have RPC coefficients, either in its GeoTIFF tags or in a companion
.xmlor.txtfile.
readme里面有这么一句话,我怎么没找到他说的RPC文件在哪?
6.cloud.ply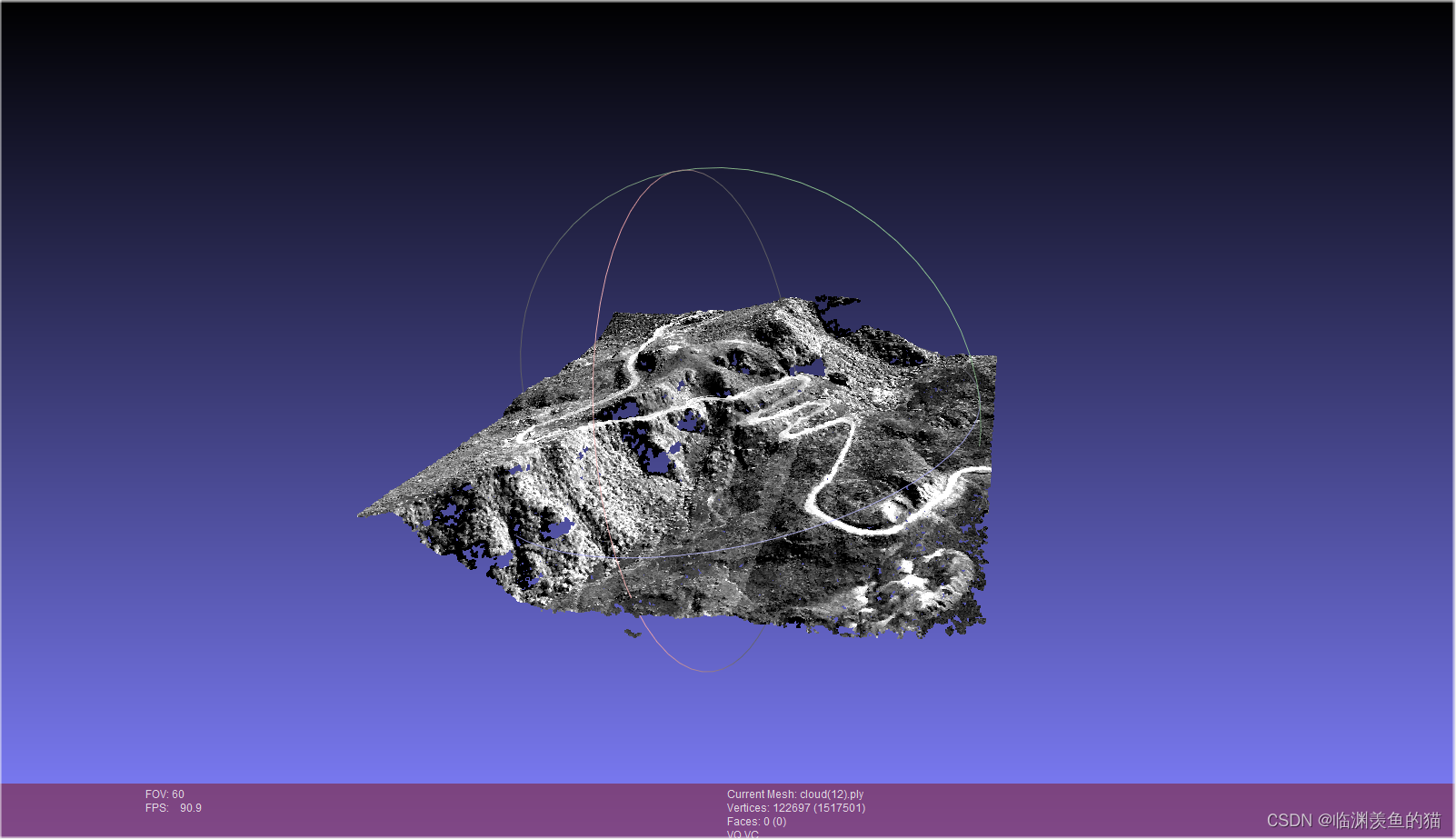
dsm
问题:
- 这个初始图像的rpc文件在哪?
- 初始左右视图像完全匹配不上怎么回事?
- 生成的dsm文件和初始左右视图像完全匹配不上?