本文主要介绍ROS的Launch File和Parameter概念,通过Launch File启动单个或多个节点,并通过Parameter配置启动参数。
更多内容,访问专栏目录获取实时更新。
当你的应用中包含了很多工作包,每个工作包了又包含了多个节点时,通过硬编码的方式在启动节点时传递参数显然不那么合适,同时要启动哪些节点,通过命令行指令一个个执行启动也必然会有很多麻烦,通过ROS Parameter Server 和 Launch File就能帮助解决这些麻烦。
ROS Parameter
ros2 param list
ros2 param get <node_name> <parameter_name>
通过上面的指令我们能查看每个节点的Parameter及其详细信息。
ros2 run <package_name> <node_name> --ros-args -p <parameter_name>:=<value>
通过上面的指令我们可以在运行节点时给节点的Parameter设置值。
在程序里,我们通过declear_parameter方法声明一个Parameter:

我们首先创建一个新的节点(参考教程:ROS2 Topics和Services),并为它添加一个Parameter,在启动该节点时传递Parameter的值:
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from std_msgs.msg import Int64
class NumberPublisherNode(Node):
def __init__(self):
super().__init__("number_publisher")
self.declare_parameter("number_to_publish")
self.number = self.get_parameter("number_to_publish").value
self.publisher = self.create_publisher(Int64, "number", 10)
self.timer = self.create_timer(1, self.publish_number)
self.get_logger().info("Number Publisher has been started!")
def publish_number(self):
msg = Int64()
msg.data = self.number
self.publisher.publish(msg)
def main(args=None):
rclpy.init(args=args)
node = NumberPublisherNode()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == "__main__":
main()
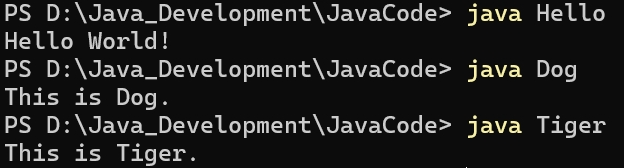
修改setup.py,编译并运行该节点,通过命令行传递Parameter的值,可以看到如下的效果:

Launch File
在工作空间下创建一个新的工作包my_robot_bringup

在新的工作包下我们新建了launch文件夹,在该文件夹下创建我们的启动文件:
number_app.launch.py:
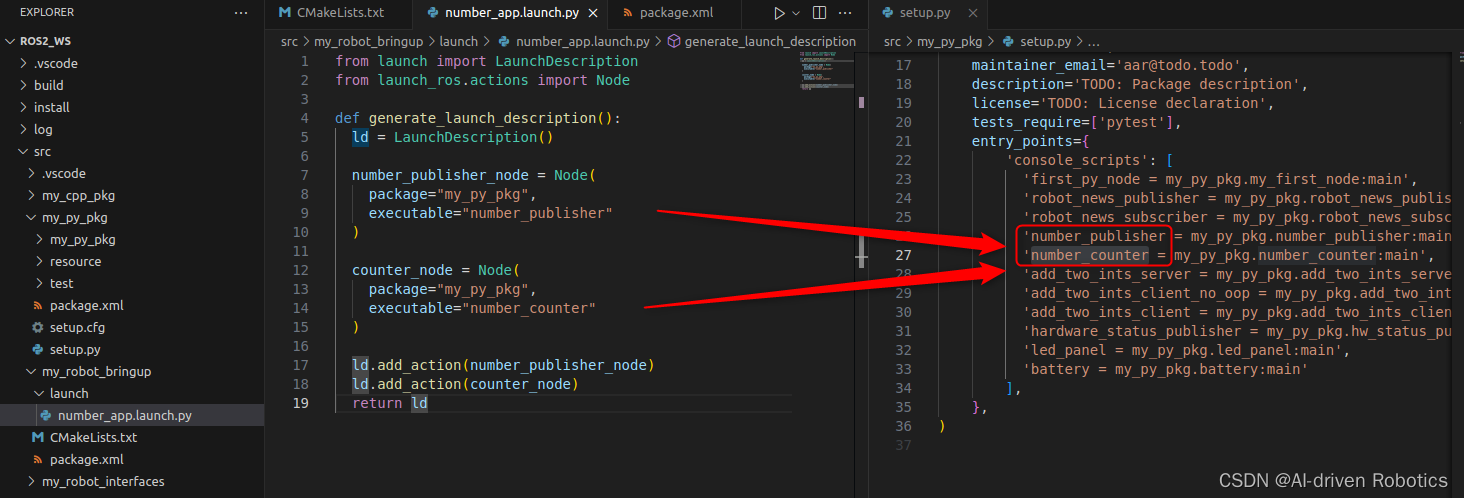
注意:函数名必须是generate_launch_description
更多启动配置:
number_publisher_node = Node(
package="my_py_pkg",
executable="number_publisher",
name="my_number_publisher", # rename node
remappings=[ # remap topic
remap_number_topic
],
parameters=[ # provide parameter
{"number_to_publish": 4},
{"publish_frequency": 1},
]
)
修改CMakeLists.txt,添加下面的指令:
install(DIRECTORY
launch
DESTINATION share/${PROJECT_NAME}
)
因为我们需要启动my_py_pkg工作包下的节点,所以在package.xml中,需要添加执行依赖:
<exec_depend>my_py_pkg</exec_depend>
编译并执行,通过ros2 node list就可以看到Launch文件里的两个节点都被启动了
ros2 launch my_robot_bringup number_app.launch.py
如有错误,欢迎留言或来信指正:hbin6358@163.com




![[oeasy]python019_ 如何在github仓库中进入目录_找到程序代码_找到代码](https://img-blog.csdnimg.cn/img_convert/aa05a77a3ab4f6194e11f0a9857736db.png)