智能门锁-手机应用相机国产、非国产统计参数对比分析
智能门锁应用
从2019年1月1日至2020年12月31日,3D人脸识别智能门锁在全市场统计中,总销量已接近20万套。其中德施曼以其先发优势,良好的市场定位和大力度的推广,成为市场发展的最大赢家,在3D人脸识别智能门锁细分领域占据着七成以上的市场份额,达到百分之七十二。其次是凯迪仕,占比近百分之二十的市场份额,两强占比近百分之九十,在市场中占据着绝对的优势地位。
1. 奥比中光U2
U2门锁人脸识别模组,基于奥比中光结构光技术设计并采用第三代自研深度引擎MX6300芯片,内置算法版,体积更小,功耗更低,更加便于门锁组装。通过3D多模态人脸识别技术,实现金融支付安全等级,对逆光、暗光、强光、不同身高、人脸姿态、人脸遮挡等应用场景均有良好适应性。该模组通过class1、ROHS以及BCTC增强级活体认证和人脸辨识算法双重认证。

其物理尺寸为41mmL×15.2mmW×8.72mmH,深度距离为0.3m-1.0m,识别一次的平均功耗为0.57W,精度为1m±5mm,视场角为H(50±2)°V(61±2)°,适用于室内和半户外,通过串口来进行通讯,可以识别1.2m-2m身高,支持自学习和挟持报警。
2. ReadSense极光
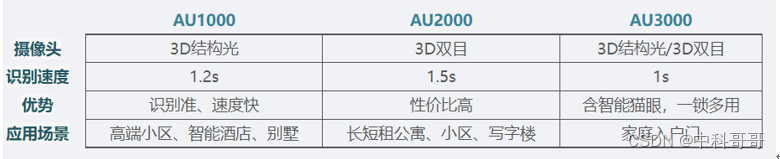
阅面(ReadSense)科技推出极光3D人脸识别门锁方案,极光3D人脸识别门锁解决方案共包含三款模组产品,分别是AU1000、AU2000和AU3000。三款模组产品各自适用于不同的场景方案,应用于超过10家智能门锁品牌的主线产品中,获得了市场与客户的极高认可
3.皇家金盾S2-DM
皇家金盾的S2-DM采用商汤双目人脸识别算法,活体安全性为98%通过率,十万分之一误识率,对比安全性98%通过率,百万分之一误识率。

手机应用
1. 结构光
3D结构光在消费电子领域的商用最早可追溯到2009年,微软与以色列3D感测公司PrimeSense合作发布了搭载3D结构光模组的体感设备Kinect一代,2010年11月上市后,该产品成为2011年销售最快的消费电子设备。尽管产品大获成功,但第一代Kinect的准确度、图像分辨率和响应速度并不理想,微软在2009年和2010年先后收购了以色列TOF相机公司3DV Systems和3D手势识别公司Canesta,并在2013年终止了与PrimeSense的合作,自行研发推出搭载TOF摄像头的Kinect2代产品。然而好景不长,由于缺乏爆款游戏应用、硬件亏本销售等问题的存在,2017年10月微软表示已经停止生产Kinect,自2011年上市以来累计销量仅3500万部。尽管Kinect失败,但在游戏市场的沉淀使得3D感测技术日益成熟,2017年苹果发布iPhone X,首次搭载3D结构光模组,可实现3D人脸识别技术,成为苹果近两年最大的创新。此前由于半导体工艺等多方面技术的限制,3D感测很难应用到体积非常有限、功耗要求低的手机上,因此iPhone X的发布是3D结构光技术的重大突破,市场对3D结构光技术的热情重新点燃。苹果的3D结构光方案正是来自为微软Kinect一代提供技术方案的PrimeSense,苹果在2013年11月宣布以3.6亿美元收购该公司。苹果之外,主要3D结构光方案厂商还有美国的英特尔、高通/Himax,以色列Mantis Vision以及国内华为、奥比中光等公司。2014年英特尔发布全球首款内嵌于各种智能设备的3D景深摄像头RealSense,采用3D结构光技术,应用在联想、戴尔等多款超级本电脑以及无人机等设备中。同年高通宣布与影像IC设计公司奇景光电Himax合作提供高分辨率、低功耗的3D结构光模组SLiMTM。iPhone X发布后,国内小米、华为和OPPO也先后发布了首款搭载3D结构光模组的智能手机,其中小米采用的是以色列Mantis Vision公司的解决方案,华为采用的是自研方案,OPPO采用的是国内公司奥比中光的解决方案。
苹果在2018年和2019年的iPhone新产品中也全部搭载了3D结构光模组。目前已经发布的搭载3D结构光模组的智能手机包括苹果的iPhone X以后的所有机型,华为的Mate20 Pro、荣耀Magic 2和Mate30 Pro,小米的小米8探索版以及OPPO的OPPO Find X。据DigiTimes数据,2018年搭载3D结构光的智能手机整体约1亿台,其中苹果占比约88%。
1. iPhone X
2017年9月,苹果公司发布了iPhone X,iPhone X的深度相机采用:单目IR+投影红外点阵+ASIC方案,通过前置点阵投影器将超过30000个肉眼不可见的光点投影到人脸,再根据红外镜头接收到的反射光点,就可以计算得到人脸深度图。 RGB摄像头拍摄的2D人脸结合计算的深度人脸信息,经过算法处理就可以绘制出精确细致的3D人脸。该技术安全性极高,可以轻松的识别出普通RGB相机难以处理的利用打印照片、软件合成、面具等进行的人脸识别攻击,可以安全方便的进行人脸活体检测。该技术用于iPhone的人脸解锁方案,称为FaceID,是iPhone X最重要的新功能之一。
2. 小米8
2018年5月,小米年度旗舰发布会中重磅亮相的小米8透明探索版,作为小米八周年纪念版的旗舰机型,融合了多项黑科技,其中以3D结构光技术的应用最为瞩目。该技术由以色列Mantis Vision公司自主研发,此次应用于小米8透明探索版也是该技术在安卓手机史上的首次尝试。
Mantis Vision的原始数据采集依靠“红外点阵投影器”、“红外相机”和“RGB相机”来完成,其工作原理是:红外点阵投影器发射编码光图案在物体表面形成反射,被红外相机接收;后台算法和程序实时解码数据,生成点云和深度图;RGB相机采集彩色图像;经过快速地网格化和纹理贴图处理,栩栩如生的3D模型便呈现在眼前。
不同于iPhone X的DOE(衍射光学元件)投影,Mantis Vision采用了基于 Mask(掩膜)的编码结构光。其创新的专利编码技术,凭借密集的点云和精确的深度信息能够捕捉最小的细节,真实还原扫描目标的原貌,同时有效降低处理运算量。另外,配合相机的高帧率,还可以实现3D内容的实时动态捕捉。
3. OPPO Find X
2018年6月,OPPO公司发布了Find X系列手机,作为安卓市场首个大规模量产的3D结构光的技术,Find X可以说做到了实际应用和设计的双重兼顾,首先在设计上,由于采用创新的双轨潜望结构设计,使得3D结构光的模组被很好的安放在了升降模块中,不使用的时候可以很好的隐藏在机身的内部。因此也就没有刘海屏的产生。这也让整机的屏占比达到了惊人的93.8%。
而在实际的应用体验上,除了实现3D面部识别以外,OPPO Find X也是基于3D结构光的安全性全面支持了微信和支付宝移动支付功能,同时在拍照方面,OPPO更是创新的将3D结构光应用到了拍照中,通过3D结构光带来的15000个识别点,OPPO Find X可以为用户建立脸部3D模型,再利用AI技术进行智能分析,比如脸部的立体轮廓、鼻型、眼睛的深浅、下巴、颧骨等,并自动给出相关美化建议,最终呈现出更加精细化的美颜效果,实现3D美颜的效果,这一点在实际的拍照体验上也有着不错的表现。

4. 华为Mate 20 Pro
华为于2018年10月上市Mate 20 Pro,前置摄像头采用了3D结构光技术,经中国泰尔实验室根据“移动电话机人脸识别安全能力测评方案”进行测评,评价为【人脸识别安全能力五星产品】,安全能力获得权威机构肯定。
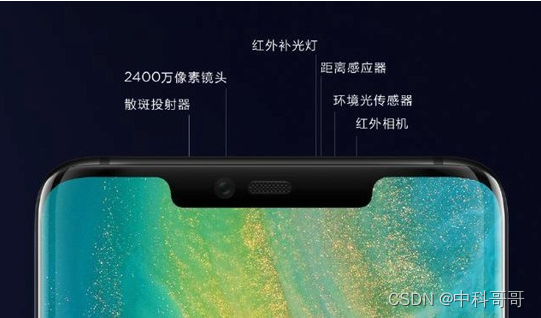
采用3D结构光的原理,HUAWEI Mate 20 Pro在录制人脸数据时,前置的散斑投射器,会将30000个不可见的小光点,投射到人脸的各个特征结构上,以获得面部深度信息;同时红外补光灯开启,获得人脸的特征信息。系统再通过红外相机拍摄和分析这些信息,从而获得精准的人脸数据。每次需要解锁时,手机会通过红外相机、散斑投射器和红外补光灯捕捉人脸数据,再与系统内的人脸信息进行比对,如果一致,则机主身份确认,手机成功解锁。
通过散斑结构光技术,HUAWEI Mate 20 Pro散斑投射器投射到人脸上的光点具有随机性,相比编码结构光来说,安全性更高。同时,红外相机通过识别关键面部点,立体防伪,能准确“认出”人脸鼻尖,瞳孔反光,脸颊偏暗等特征。
TOF
TOF最早的商用可追溯到2006年7月,衍生自CSEM(瑞士电子与微技术中心)的MESA Imaging公司成立,并推出商用TOF摄像头产品系列SwissRanger,最开始应用于汽车的被动安全检测。2014年,MESA被新加坡微型光学器件厂商Heptagon收购,Heptagon在2016年又被奥地利知名传感器厂商AMS收购,在小型化TOF传感器领域已经具备了一定优势。2013年,微软在第二代Kinect中采用了TOF技术,方案来自2010年收购的TOF相机公司3DV Systems。2015年,索尼索尼收购比利时手势识别技术公司SoftKinetic,该公司拥有知名DepthSense TOF感测系统,两年后索尼就发布了全球最小的TOF模组。TOF技术首次应用到智能手机是在2016年,Google和联想合作推出了全球首个搭载TOF模组的智能手机Phab2Pro,采用的是pmd/英飞凌的TOF方案,该手机可实现一些如三维测量等简易的AR应用,但并没有引起市场较大的反响。
英飞凌和德国3D感测公司pmd在TOF领域合作了数十年,并开发出了知名的REAL3 TOF传感器芯片,其中pmd主要提供TOF像素矩阵,英飞凌主要提供芯片上系统(SoC)集成的所有功能组件,并开发相应的制造工艺,该方案还用在了华硕2017年发布的AR智能手机Zenfone上。2018年8月6日,OPPO在北京召开了TOF技术沟通会,并在8月23日发布了其首部搭载TOF摄像头的智能手机OPPO R17 Pro,采用了Sony的解决方案。随后在2018年12月,vivo发布了其首部搭载TOF摄像头的智能手机vivo NEX双屏版,采用了松下的解决方案;华为发布了其首部搭载TOF摄像头模组的智能手机荣耀V20,采用的是OPPO R17 Pro相同的TOF方案。进入2019年后,安卓厂商纷纷加入TOF镜头的阵营,2019年2月,三星发布了Galaxy S10 5G,前后分别各搭载一颗TOF镜头;LG发布了LG G8 ThinQ,搭载后置TOF镜头,采用了英飞凌的解决方案;联想发布了Z6 Pro 5G手机,搭载了后置TOF镜头。华为在6月份在中端机型nova 5 Pro上也搭载了后置TOF镜头。
1. 华硕 Zenfone
来自英飞凌科技股份公司的REAL3™图像传感器芯片在华硕最新推出的增强现实(AR)智能手机中起到了关键作用。这款手机2017年1月在拉斯维加斯国际消费电子展CES 2017上推出。华硕 Zenfone AR是当时全球最轻薄的搭载3D飞行时间(ToF)摄像头的智能手机,能实现对周围环境的实时三维感知。
REAL3图像传感器芯片是世界上最小的智能手机专用3D摄像头模块的关键组件。它基于飞行时间(ToF)原理,测量红外信号从摄像头往返拍摄对象所花的时间。其消耗的时间被称为“飞行时间”。对于电池供电式移动终端的性能、大小和功耗而言,ToF较之其他3D感应原理具备诸多优势。

2. OPPO R17 Pro
OPPO R17 Pro于2018年8月发布,R17 Pro采用了后置三摄像头的设计:TOF镜头+带可变光圈的主镜头+景深三镜头。TOF是面光源投射,将红外光均匀的投射在物体上,然后使用TOF相机捕捉红外光反射的时间差,通过计算得出景深信息,这样的好处在于投影成像距离较远,精度也不差。因为同样采用了主动光源,TOF在黑暗的环境下成像也不受影响。而且,将TOF布置在后置摄像头区域能更容易的放置主动光源,减少对手机空间的挤压。最关键的是,TOF技术已经相对成熟,它的成本也比3D结构光更低。