在配置前要记得先定义一下DMA转运的源端数组和目标数组两个数组哦。
接下来我们就开始准备配置吧
配置
初始化
1.RCC开启时钟(开启DMA的时钟)
void RCC_AHBPeriphClockCmd(uint32_t RCC_AHBPeriph, FunctionalState NewState)
作用:开启时钟
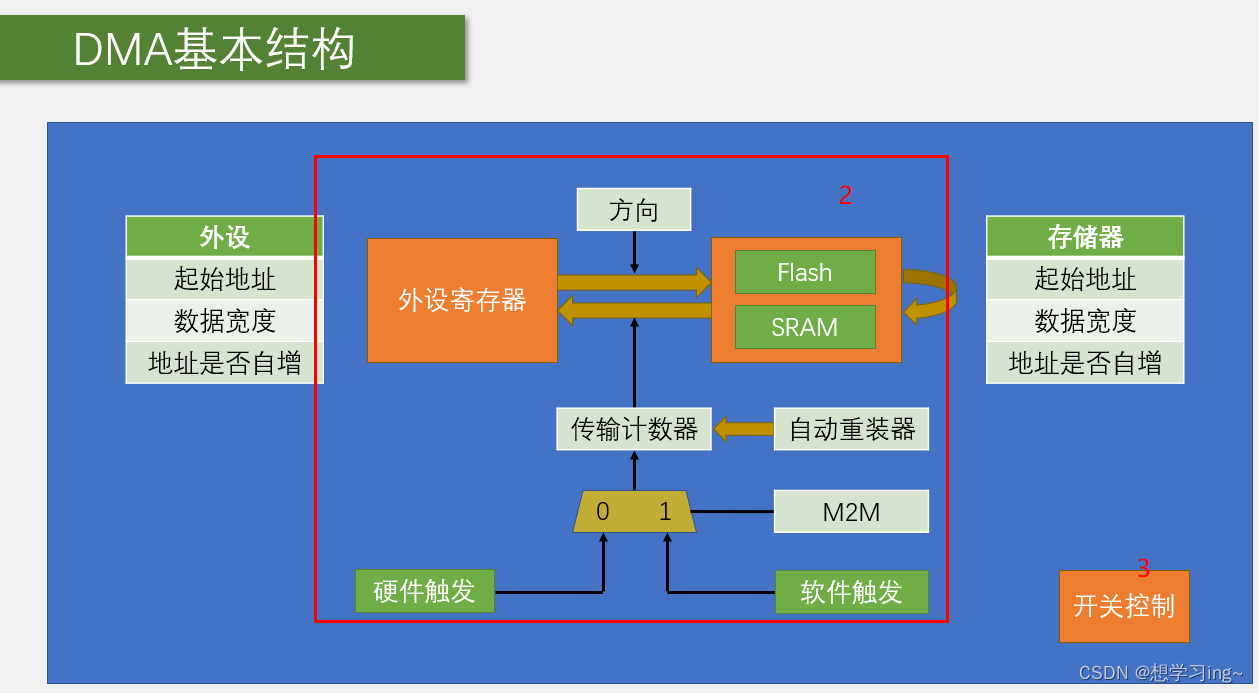
2.初始化DAM参数(包括外设和存储器站点的起始地址、数据宽度、地址是否自增、方向、传输计数器、是否要自动重装、选择触发源、通道优先级等)
void DMA_Init(DMA_Channel_TypeDef* DMAy_Channelx, DMA_InitTypeDef* DMA_InitStruct)
作用:初始化DMA。
注意:如果选择硬件触发,还需要调用×××_DMACmd,开启触发信号的输出。
如果需要DMA的中断,需要调用DMA_ITConfig,开启中断输出,再在NVIC里配置相应的中断通道,然后写中断函数就行了
3.打开DMA
void DMA_Cmd(DMA_Channel_TypeDef* DMAy_Channelx, FunctionalState NewState)
作用:设置DMA是使能/失能
注意:在运行的过程中,如果转运完成,传输寄存器就会清0.这时,如果还想给传输寄存器赋值的话,就关闭DMA(失能)——写传输寄存器——开启DMA(使能)
那我们接下来写一下这个函数
DMA传输函数
1.将DMA失能
void DMA_Cmd(DMA_Channel_TypeDef* DMAy_Channelx, FunctionalState NewState)
2.给传输寄存器赋值
void DMA_SetCurrDataCounter(DMA_Channel_TypeDef* DMAy_Channelx, uint16_t DataNumber);
作用:设置当前数据寄存器(给传输寄存器写数据)
3.给DMA使能
void DMA_Cmd(DMA_Channel_TypeDef* DMAy_Channelx, FunctionalState NewState)
4.获取标志位观察是否转运完成
FlagStatus DMA_GetFlagStatus(uint32_t DMAy_FLAG);
作用:获取标志位状态
5.清除标志位
void DMA_ClearFlag(uint32_t DMAy_FLAG);
代码
MyDMA.c
#include "stm32f10x.h" // Device header
uint16_t MyDMA_Size;
void MyDMA_Init(uint32_t AddrA, uint32_t AddrB, uint16_t Size)
{
MyDMA_Size = Size;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
DMA_InitTypeDef DMA_InitStructure;
DMA_InitStructure.DMA_PeripheralBaseAddr = AddrA;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Enable;
DMA_InitStructure.DMA_MemoryBaseAddr = AddrB;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = Size;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_M2M = DMA_M2M_Enable;
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
DMA_Cmd(DMA1_Channel1, DISABLE);
}
void MyDMA_Transfer(void)
{
DMA_Cmd(DMA1_Channel1, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel1, MyDMA_Size);
DMA_Cmd(DMA1_Channel1, ENABLE);
while (DMA_GetFlagStatus(DMA1_FLAG_TC1) == RESET);
DMA_ClearFlag(DMA1_FLAG_TC1);
}
MyDMA.h
#ifndef __MYDMA_H
#define __MYDMA_H
void MyDMA_Init(uint32_t AddrA, uint32_t AddrB, uint16_t Size);
void MyDMA_Transfer(void);
#endif
例题
DMA转运数据
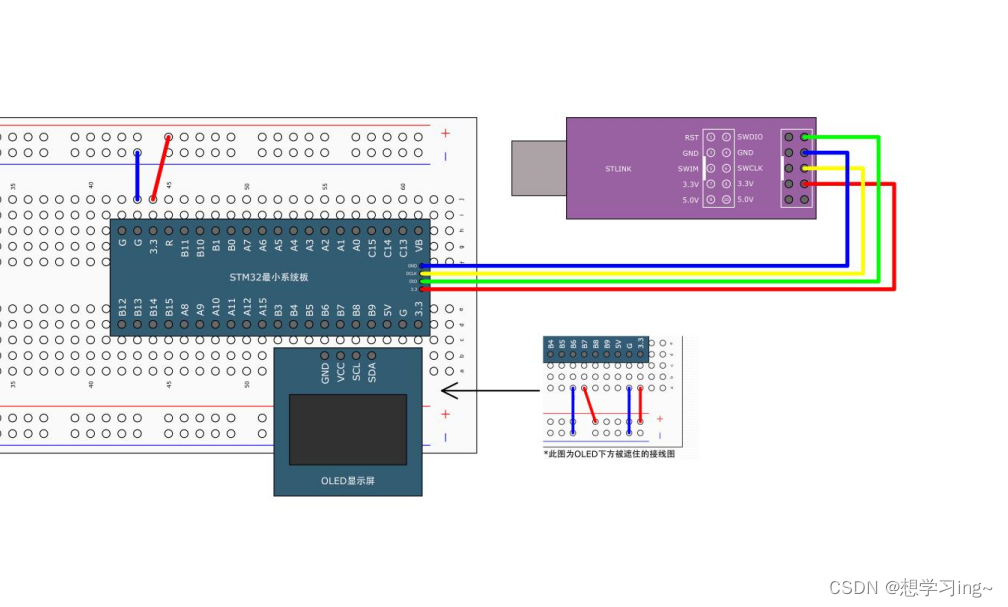
接线
代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MyDMA.h"
uint8_t DataA[] = {0x01, 0x02, 0x03, 0x04};
uint8_t DataB[] = {0, 0, 0, 0};
int main(void)
{
OLED_Init();
MyDMA_Init((uint32_t)DataA, (uint32_t)DataB, 4);
OLED_ShowString(1, 1, "DataA");
OLED_ShowString(3, 1, "DataB");
OLED_ShowHexNum(1, 8, (uint32_t)DataA, 8);
OLED_ShowHexNum(3, 8, (uint32_t)DataB, 8);
while (1)
{
DataA[0] ++;
DataA[1] ++;
DataA[2] ++;
DataA[3] ++;
OLED_ShowHexNum(2, 1, DataA[0], 2);
OLED_ShowHexNum(2, 4, DataA[1], 2);
OLED_ShowHexNum(2, 7, DataA[2], 2);
OLED_ShowHexNum(2, 10, DataA[3], 2);
OLED_ShowHexNum(4, 1, DataB[0], 2);
OLED_ShowHexNum(4, 4, DataB[1], 2);
OLED_ShowHexNum(4, 7, DataB[2], 2);
OLED_ShowHexNum(4, 10, DataB[3], 2);
Delay_ms(1000);
MyDMA_Transfer();
OLED_ShowHexNum(2, 1, DataA[0], 2);
OLED_ShowHexNum(2, 4, DataA[1], 2);
OLED_ShowHexNum(2, 7, DataA[2], 2);
OLED_ShowHexNum(2, 10, DataA[3], 2);
OLED_ShowHexNum(4, 1, DataB[0], 2);
OLED_ShowHexNum(4, 4, DataB[1], 2);
OLED_ShowHexNum(4, 7, DataB[2], 2);
OLED_ShowHexNum(4, 10, DataB[3], 2);
Delay_ms(1000);
}
}
其他重要库函数
uint16_t DMA_GetCurrDataCounter(DMA_Channel_TypeDef* DMAy_Channelx);
作用:获取当前数据寄存器(返回当前传输寄存器的值)
ITStatus DMA_GetITStatus(uint32_t DMAy_IT);
作用:获取中断状态
void DMA_ClearITPendingBit(uint32_t DMAy_IT);
作用:清除中断挂起位
有什么问题在评论区说哦!







![【Qt秘籍】[004]-Qt中的重要工具-介绍](https://img-blog.csdnimg.cn/direct/6d5e540f12dd4abc8f6a9bd447181345.png)