在C++中,哈希表是一种常用的数据结构,用于实现快速的插入、删除和查找操作。
哈希表的核心在于哈希函数,它将输入的关键字转换为一个数组索引。然而,不同的关键字可能映射到相同的索引,这种情况称为哈希冲突。
有效地解决哈希冲突是确保哈希表性能的关键。
1. 开放地址法
概念:开放地址法是指当一个关键字映射的位置已经被占用时,会寻找下一个空闲的位置进行存放。查找时,若原位置没有找到,则按照同样的规则继续查找下一个可能的位置。
优点:实现简单,无需额外的数据结构。
缺点:可能会导致某些区域过于密集,影响性能;删除操作复杂。
代码示例:
#include <iostream>
#include <vector>
class OpenAddressingHashTable {
public:
explicit OpenAddressingHashTable(size_t size) : table(size, -1), used(size, false) {}
void insert(int key) {
size_t index = key % table.size();
while (used[index]) {
index = (index + 1) % table.size(); // 线性探测法
}
table[index] = key;
used[index] = true;
}
bool search(int key) {
size_t index = key % table.size();
while (used[index]) {
if (table[index] == key) return true;
index = (index + 1) % table.size();
}
return false;
}
private:
std::vector<int> table;
std::vector<bool> used;
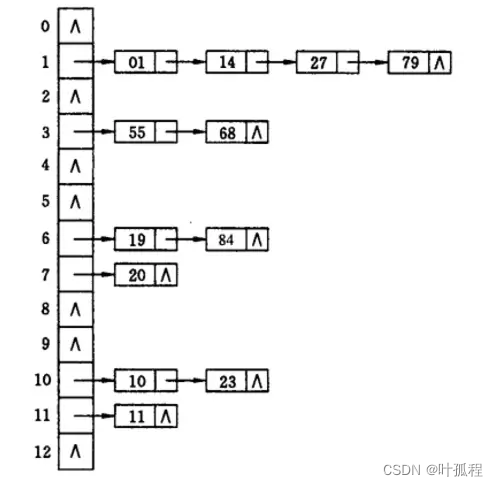
};2. 链地址法(哈希桶)
概念:链地址法是在每个数组位置上挂接一个链表,所有映射到该位置的元素都存储在这个链表中。
优点:冲突少时效率高,支持动态扩容,删除操作简单。
缺点:链表过长时,查找效率降低。
代码示例(基于之前提供的哈希桶示例):
#include <iostream>
#include <list>
#include <vector>
class HashBucket {
public:
explicit HashBucket(size_t size = 10) : buckets(size) {}
void insert(int key, std::string value) {
size_t index = hashFunction(key);
buckets[index].push_back({key, value});
}
std::string search(int key) {
size_t index = hashFunction(key);
for (const auto& pair : buckets[index]) {
if (pair.first == key) {
return pair.second;
}
}
return "Not Found";
}
void remove(int key) {
size_t index = hashFunction(key);
auto& bucket = buckets[index];
bucket.erase(std::remove_if(bucket.begin(), bucket.end(),
[key](const auto& p){ return p.first == key; }),
bucket.end());
}
private:
std::size_t hashFunction(int key) const {
return key % buckets.size(); // 简单的取模哈希函数
}
std::vector<std::list<std::pair<int, std::string>>> buckets;
};
int main() {
HashBucket hashTable;
hashTable.insert(10, "Apple");
hashTable.insert(25, "Banana");
hashTable.insert(20, "Cherry");
std::cout << "Search 10: " << hashTable.search(10) << std::endl; // 应输出 Apple
std::cout << "Search 30: " << hashTable.search(30) << std::endl; // 应输出 Not Found
hashTable.remove(20);
std::cout << "Search 20 after removal: " << hashTable.search(20) << std::endl; // 应输出 Not Found
return 0;
}3. 再哈希法
概念:当发生冲突时,使用第二个哈希函数计算另一个位置,如果仍冲突,则继续使用第三个或更多哈希函数,直到找到空位。
优点:可以减少聚集现象。
缺点:需要设计多个哈希函数,增加了实现复杂度。
代码示例(简略示例):
class RehashHashTable {
public:
void insert(int key) {
size_t index = primaryHash(key);
if (isOccupied(index)) {
index = secondaryHash(key); // 假设这是第二个哈希函数
// 可能需要更多的检查和重哈希直到找到空位
}
// 实际插入逻辑省略
}
private:
size_t primaryHash(int key) { /* 主哈希函数实现 */ }
size_t secondaryHash(int key) { /* 辅助哈希函数实现 */ }
bool isOccupied(size_t index) { /* 检查位置是否已被占用 */ }
};4. 建立公共溢出区(使用率低)
概念:当主表满时,额外分配一块区域作为溢出区,所有冲突的元素都放入这个区域,并以某种顺序(如链表)链接起来。
优点:实现简单。
缺点:查找效率较低,因为可能需要遍历整个溢出区。
解决哈希冲突的策略各有优劣,选择哪种方法取决于具体的应用场景和性能要求。开放地址法适合内存有限且数据量不大的情况;链地址法则更适合数据量大且需要频繁插入删除的场景;再哈希法和建立公共溢出区则是针对特定需求的解决方案,可能在某些特殊场景下更为合适。
在实际应用中,还需要考虑哈希函数的设计、哈希表的动态扩容机制等因素,以进一步优化性能。C++标准库中的std::unordered_map和std::unordered_set就是使用了类似链地址法的实现,结合了动态扩容机制,提供了高效的哈希表操作接口。



![页面加载不出来,报错[@umijs/runtime] load component failed](https://img-blog.csdnimg.cn/direct/a8128ccc9b7b42c3ae50ba83aeecf5d1.png)