TOF相机国产、非国产统计参数对比分析
Kinect v2
Kinect v2是Microsoft在2014年发售的,如图1-1所示。相比于Kinect v1在硬件和软件上作出了很大的进化,且在深度测量的系统和非系统误差方面表现出更好的性能。
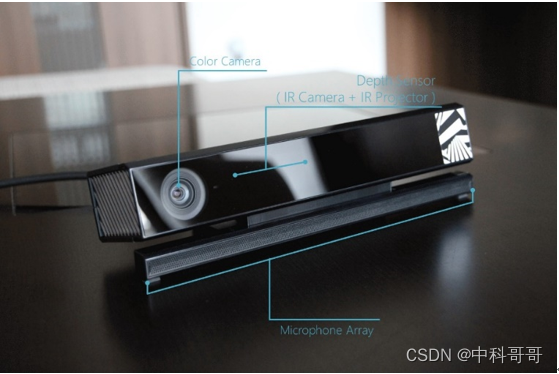
Kinect v2中一共有三个摄像头,从左至右分别为颜色摄像头,红外摄像机,红外投影机
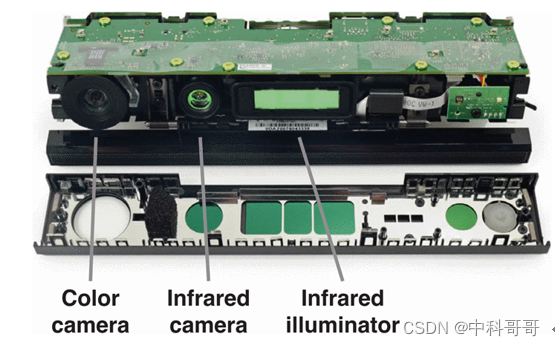
Kinect v2深度传感器基于飞行时间TOF测量原理,闪光红外光照亮场景,光线被障碍物反射,每个像素的飞行时间由红外相机记录。在内部,波调制和相位检测用于估计到障碍物的距离(间接ToF)。
其物理尺寸为250mmL×70mmW×45mmH,深度范围为0.5-4.5m,3D分辨率为512×424,RGB分辨率为1920×1080,帧率为30FPS,视场角为70°H, 60°V,使用USB3.0接口,可接入ROS驱动。
PMD CamCube 3.0
CamCube3.0拥有200x200像素,可同时获取高分辨率距离和灰度信息。采用最新的高灵敏度和增强性能的PMD 41k-S2芯片,可在短积分时间和长距离下获得更高精度的数据,采用SBI(背景光抑制)技术,产品可用于户内和户外环境。优化的光学镜头(F1,1),对于宽视场角应用场合下仍可提供优秀的3D性能。抗运动模糊处理允许测量到快速移动物体。ROI(感兴趣的区域)设定功能可满足特定应用下横向分辨率。硬件同步触发可轻易同CamCube3.0到其它系统。对于更高级的图像处理需求,CamCube3.0可提供原始数据和算法去进一步处理这些数据。

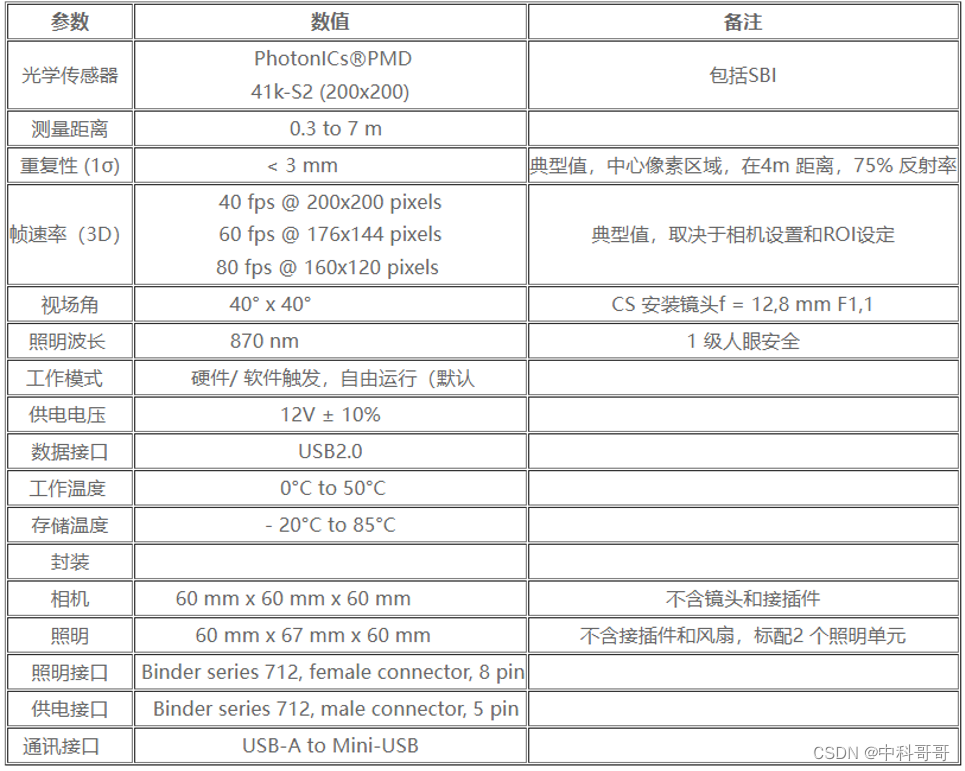
扩展API(PMDSDK2)接口函数可在不同的调制频率和积分时间下调节多达四种帧速率输出,以便根据实际情况获取不同的场景信息。由于采用模块化的设计,硬件和软件可轻易调整为不同的场合需求。比如,改变镜头或者改变主动照明以满足特殊需求,由于固件可升级,CamCube3.0可轻易升级到后续版本。产品发货时自带显示工具软件CamVis3,API接口函数PMDSDK2和MATLAB接口PMDSDK,可轻易把想法变成现实。其技术参数如图1-4所示。
Camcube3.0相比于Kinect v1来说具有更宽的工作距离,而且工作距离可调整(可通过更改光源的调制频率来延长工作距离到几十米),还通过更改光学镜头来调整视场大小,具有可靠的深度精度,每个像素对应一个3D数据。而Kinect,深度方向的分辨率不清晰,当目标模式不能被成功探测时,深度图通常出现空洞,深度精度大约为3cm–4cm。
目标物体的分辨率方面:Kinect不能很好地分辨手指,而Camcube3.0可探知更细小的特征。PMD相机抗环境光干扰的能力更强,PMD相机可适用户外环境,从体积上说,PMD的相机比Kinect更小巧,从成本上说,
Mesa Swiss Ranger 4000
MESA Imaging成立于2006年7月,旨在将3D飞行时间深度测绘相机商业化。除了屡获殊荣的SwissRanger™技术外,MESA还能够利用其丰富的经验来开发定制的相机解决方案。
Swiss Ranger 4000实时提供高分辨率3D图像数据。该器件依赖于能够实时捕获三维数据集(称为深度图)的图像传感器技术,并内置于单个紧凑的固态外壳中。
相机的核心是一种先进的传感器技术,该技术采用飞行时间距离测量原理,其中来自相机内部照明源的红外光被场景中的物体反射并传播回相机,在那里其精确的到达时间由数万个传感器像素中的每一个独立测量。提供两种测量范围型号,最远可达 10 米。日期通过USB 2.0或以太网输出到计算机进行可视化,解释和处理。有各种型号可供选择,以满足用户需求。
其物理尺寸为65×65×68mm,最大帧率为50FPS,RGB分辨率为176×144,视场角为43.6°×34.6°,可以通过USB或者以太网进行采集,现已停止生产。
Creative Senz3D/DepthSense 525
索尼DepthSenseTM飞行时间(ToF)传感器集各项先进技术于一体,提供快速、可靠的实时3D成像。通过利用电流辅助光电子解调器(CAPD)和其高性能背照式像素结构,以及LUCID的专业化的相机设计,索尼可在LUCID的Helios 3D系列相机中达到最大飞行时间性能。
飞行时间(ToF)技术已在工业行业应用多年,但索尼IMX556 DepthSense ToF传感器的发布将3D传感的精度和准度带到了行业的新水平。凭借其独特的DepthSense像素结构,索尼的ToF传感器能够更可靠地3D 格式、更详细、更快速的帧率重建被测物体。结合LUCID自身的相机研发技术力量,索尼的DepthSense传感器将为我们带来最大的工业应用潜力。DepthSense 525的RGB分别率为320×240,视场角为74°V×58°H,深度范围为0.15-1m。

ifm
ifm O3D303可以用于距离、液位或体积的视觉评估,通过时间间隔测量得来的可靠距离测量,在一个单元中集照明、测量和评估为一体,每次测量输出93,000个距离和灰度值,方便对应用进行详细评估,通过直观的参数设定软件进行集成。
其图像分辨率共有两种,2×2固定模式为176×132,或352×264,深度范围为0.3-8m,帧率25FPS,视场角为60°V×45°H,物理尺寸为120×95×76 mm,接口使用以太网接口,支持ROS、ROS2驱动。

ifm O3X100的3D分辨率为224×172,深度范围0.05-3m,帧率最大为20FPS,支持自主配置,视场角60°V×45°H,物理尺寸为80mm×43.5mm×21mm,接口使用以太网接口,支持ROS、ROS2驱动。

Basler
Basler是全球领先的高品质工业相机和相机配件制造商,开发并制造面向工业、交通和医疗等市场应用的工业相机、工业镜头,以及其他工业视觉组件。
Basler blaze相机是一款工业3D相机,按照脉冲式Time-of-Flight原理工作。配备在940 nm近红外范围(NIR)内运作的激光二极管(VCSEL),只需一次拍摄即可生成包含2D和3D数据的多部分图像,包括范围、强度和置信图。
Basler blaze采用Sony最新DepthSense™ IMX556PLR芯片技术,实现出色3D成像;使用ToF (Time-of-Flight)的方法,可进行精确到毫米级的光学测量;测量范围大,例如可覆盖两个欧标托盘或一辆小型汽车;实时传输经过预处理的3D点云和2D强度图像;能在自然光下工作,具备IP67级保护,在严苛条件下依然能获得稳定的成像效果;不受光线和对比度的影响;借助精巧的设计和千兆网(GigE)接口,轻松实现系统集成;友好易用且独立于平台的编程界面,带有示例程序;能在多相机系统中可靠运行,且互相不会产生干扰。

blaze-101相机物理尺寸为100mm×81mm×64mm,分辨率为640×480,使用GigE以太网接口,视场角为67°×51°,工作范围为0-10m,精度为±5mm[0.5-5.5m],帧率为30FPS。
Terabee
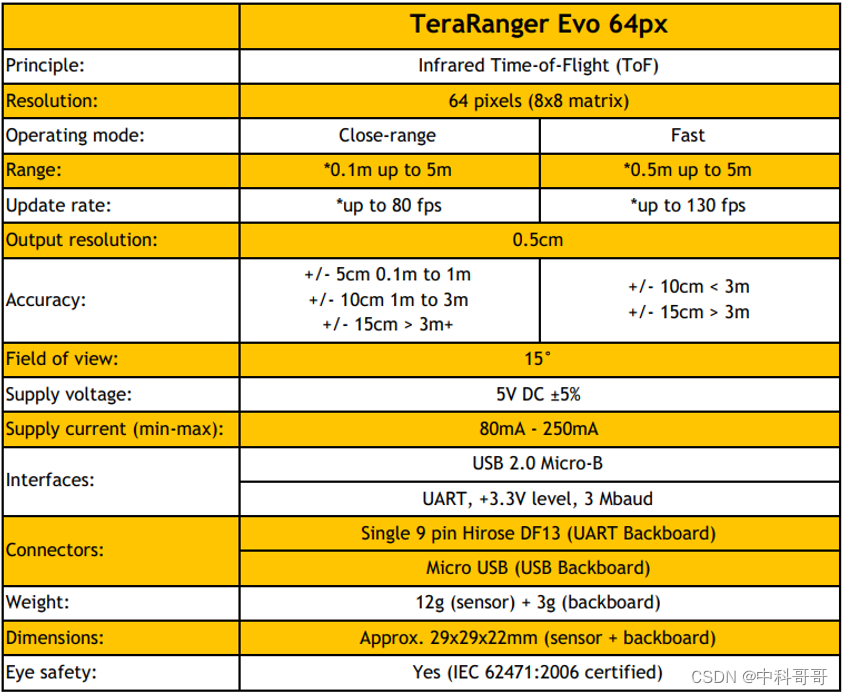
Terabee是飞行时间传感TOF的领导者。传感器模块、嵌入式软件和面向系统集成商的即用型解决方案使Terabee成为LiDAR、3D深度传感、低分辨率热成像和射频定位系统的首选合作伙伴。Terabee现在的3D TOF相机一共有三种,分别是:TeraRanger Evo 64px、Terabee 3Dcam 80×60以及Terabee 3Dcam VGA。
Evo 64px专为室内使用而开发,可在15度视野范围内输出8×8高速距离读数矩阵,最大范围可达5米。全部采用小巧轻便的外形,仅重12克。免费的图形用户界面可用于在PC上进行快速测试,并且还编写了ROS驱动程序,增加了即插即用的便利性。
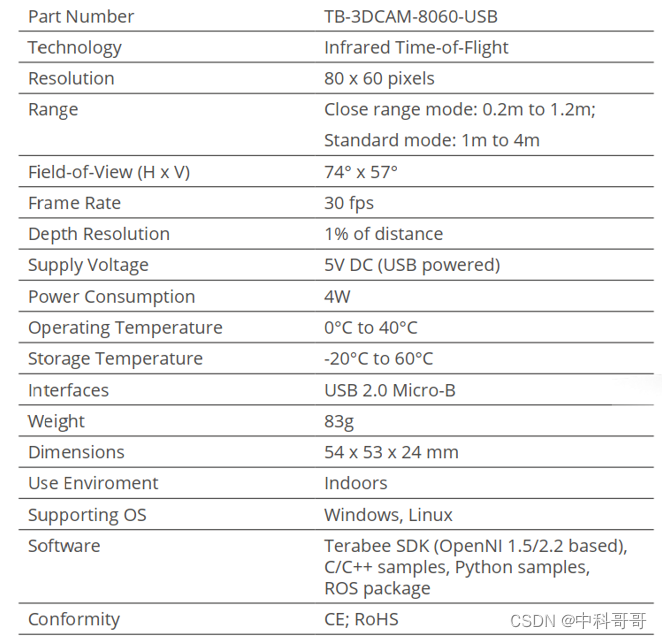
Terabee 3Dcam 80×60具有80×60像素分辨率和74°×57°视场角。Terabee 3Dcam带有基于OpenNI的SDK、C/C++示例、Python示例和ROS包,可通过Windows或Linux操作系统上的USB接口轻松设置和流式传输深度数据。

Terabee 3Dcam VGA工业级深度摄像头的首选,坚固、安全、紧凑,具有VGA分辨率和最宽广的视野。作为Terabee工业4.0产品的最新成员,3Dcam VGA结合了价格,性能和多功能性。该器件坚固耐用,IP65和IP67防护等级,是同类产品中体积最小、重量最轻、价格最实惠的工业级飞行时间3D摄像机。
3Dcam VGA 具有最宽的视场(90°×67.5°)、VGA分辨率(640×480像素),作为1类激光产品,3Dcam VGA是工业自动化和工业4.0解决方案的关键组件。它适用于物流,移动机器人,人机交互,液位监控,智能农业以及人员和运动检测等应用。
其物理尺寸为100×103×32mm,RGB分辨率为640×480(VGA),可以输出深度信息、点云等,深度范围为0.35m-5m,最高可达30FPS,视场角为90°×67.5°,采用GigE以太网接口和RS485接口。

Phab2 Pro
Google和联想合作于2016年11月推出的联想Phab2 Pro,是全球首款支持Google Project Tango技术的手机,其深度相机采用TOF技术方案,由PMD公司和Infineon公司合作研发。
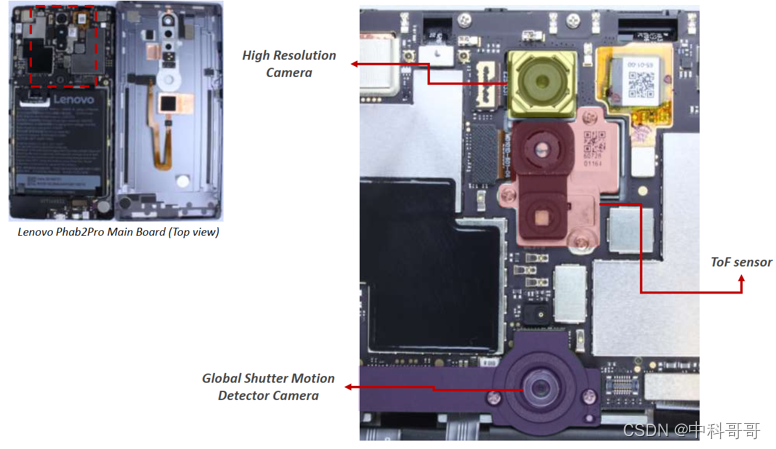
Phab2 Pro使用三摄像头传感器实现这项TOF技术。该子系统使用三星的1600万像素分辨率CMOS图像传感器(CIS),Omnivision的VGA分辨率CIS,以及英飞凌和pmd合作的38000像素分辨率3D图像传感器,集成到一个具有近红外垂直腔面发射激光器(VCSEL)的子系统中。
为了提供3D场景,三摄像头的高分辨率摄像头提供纹理,全局快门摄像头提供运动跟踪。最后,由于VCSEL发射器,ToF传感器以高速率提供深度感知,这使手机能够像人类一样快速理解空间和运动。
奥比中光Femto
奥比中光是行业领先的3D视觉感知整体技术方案提供商,在技术纵向上对包括深度引擎芯片、感光芯片、专用光学系统等在内的核心底层技术以及SDK、行业应用算法等全链路技术进行全栈式自主研发,在技术横向上对结构光、iToF、双目、dToF、Lidar、工业三维测量进行全领域布局。
Femto是基于奥比中光iToF智能视觉平台技术开发的高性能RGBD相机,适用距离为0.2m-5m,搭载有iToF高画质Rx、Tx模块,可输出高完整度、高精确性的深度数据,支持USB3.0/Tpye-C接口,可实现3D追踪、识别及重建等应用需求。其物理尺寸为99.4mmL×69mmW×25mmH,深度范围为0.2-5m,精度为1%,深度分辨率@帧率为640×480@5/10/15/30FPS,使用接口为USB3.0。