目录
一、信号
1.1、生活中的信号
1.2、Linux中的信号
二、信号处理常见方式
三、信号的产生
3.1、简单理解信号的保存和发送
3.2、键盘产生信号
3.3、核心转储
3.4、系统调用接口产生信号
3.4.1、kill
3.4.2、raise
3.4.3、abort
3.5、软件条件产生信号
3.6、硬件异常产生信号
四、信号的保存
4.1、相关概念
4.2、信号保存——三个数据结构
4.3、信号集——sigset_t
4.3、信号操作函数
一、信号
1.1、生活中的信号
在生活中,我们很容易能够想到常见的一些信号。比如,红绿灯,手机闹钟,上下课铃声,转向灯等等。我们人不仅能够识别它们,还能够知道不同的信号对应的下一步动作应该怎么做。比如,红灯停绿灯行;上课铃响就上课,下课铃响就下课;转向灯告诉别人我要转的方向。
那么,我们是怎么识别并知道这些信号,并且知道信号发出后,接下来的动作应该是怎么样的呢?首先,这当然是规定过的,交通部门规定了红灯停绿灯行,而如果交通部门规定红灯行,绿灯停,那么我们也就只能照做。其次,我们从出生开始,大人们就不断告诉我们,要红灯停,绿灯行,久而久之,我们就记住了特定场景下的信号,以及后续我们需要做到动作,并且终身不忘。
而且,即使我们没有在过马路,而是在吃饭,我们也能够知道应该如何处理红绿灯信号。
再比如,如果,我的9点的闹钟响了,但是我没有立即起床,而是30分钟后再起床。这就说明,当信号产生的时候,我们不一定会立即执行后续动作,但是我记住了闹钟响过了,我该起床了,后面我再执行起床的动作。
上面就是一些生活中的信号,以及我们对待信号的方式。下面我们就来看看Linux中的信号。
1.2、Linux中的信号
什么是Linux信号?
Linux信号本质是一种通知机制,是用户或者操作系统,通过发送一定的信号,来通知进程某件事已经发生,你可以后续对其进行处理。
Linux信号的特点
结合上面生活中的信号的特点,Linux信号有如下特点:
a. 进程能够识别信号,即能够看到信号发送给了自己,并且知道后续的处理动作。
b. 进程能够识别信号,已经由Linux设计者提前设计好了,并且规定了各种信号的后续处理动作。
c. 信号的产生是随机的,信号产生时,进程可能正在做自己的事,所以,进程不一定会立即对信号进行处理。
d. 因为进程不一定立即处理信号,所以进程一定能够将信号记住,后续再进行处理。
e. 进程会在合适的时候处理信号(什么时候合适?后面会讲)。
g. 一般而言,信号的产生相对于进程是异步的。
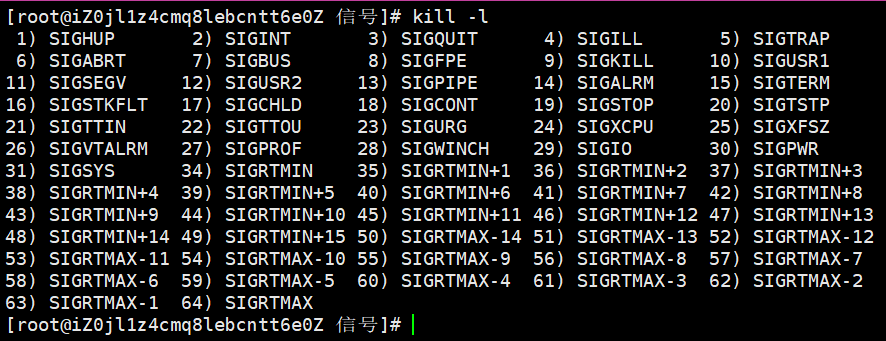
信号查看:我们可以通过 kill -l 命令查看Linux中有哪些信号
其中,1~31号信号,是普通信号,34~64是实时信号。我们在平时使用中使用的最多的是普通信号。
二、信号处理常见方式
为了方便后面的讲解,我们首先了解一下信号处理的常见方式:
1、执行该信号的默认处理动作(进程自带的,Linux设计者写好的逻辑)。
2、用户自己提供一个信号处理函数,要求在进行信号处理时,使用用户自己定义的方式处理信号,这种方式称为捕捉(Catch)一个信号。
3、忽略该信号。
我们可以通过 man 7 signal 查看信号的默认处理动作:
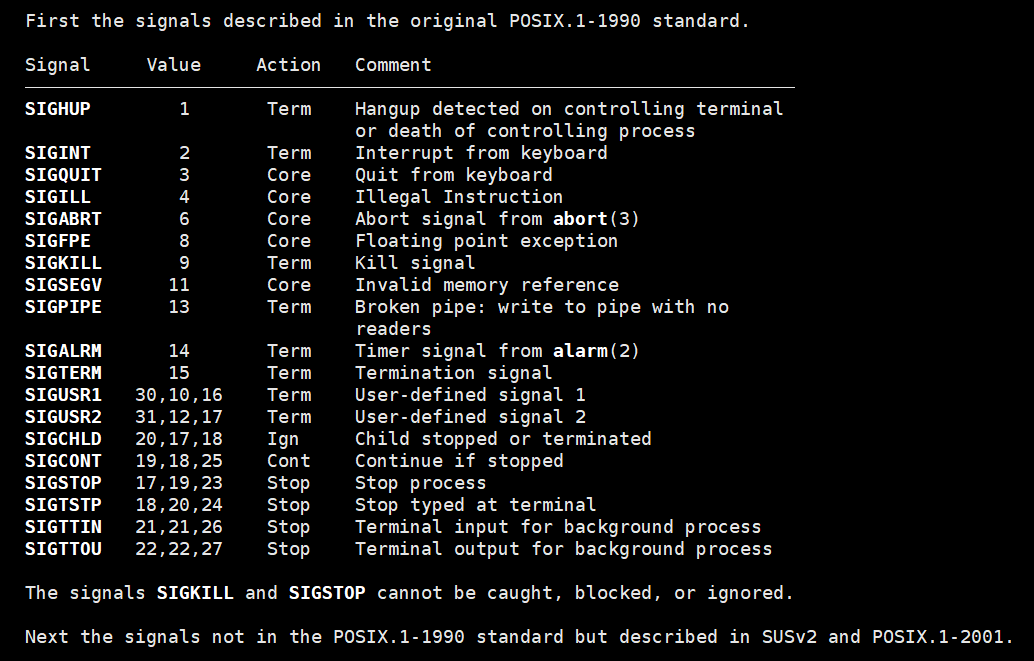
value:信号编号 action:默认处理动作。
三、信号的产生
3.1、简单理解信号的保存和发送
为了下面我们讲解信号的产生,这里我们先简单地理解一下信号的保存。
前面讲到过,信号产生后,进程不一定会立即处理信号,而是在之后的某个合适的时间对信号进行处理。所以在这中间的一段时间里,我们必须对信号进行保存。
对于保存,进程只需要知道是否有这个信号,就可以对信号进行处理,所以我们可以使用位图来对信号进行保存。0就代表该比特位对应的信号没有产生,1就代表产生了该信号。这样,在之后进程只需要遍历一遍位图,就可以知道产生了哪些信号,然后进行处理。
该位图在进程的PCB中,属于内核数据,只有操作系统能够修改,所以信号的发送就是os把信号对应的比特位的数字由0改成1。
当然,关于信号的保存和发送我们会在下面的内容中,进行详细的讲解,这里只是有一个概念。
3.2、键盘产生信号
在之前讲进程等待时,我们知道使用 Ctrl + c 的组合键能够终止一个进程,而且我们也讲了,其本质就是通过向进程发送2号信号,来终止进程的。下面我们就来证明一下:
我们使用自定义函数,将信号进行捕捉:signal
#include <signal.h>
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);
RETURN VALUE
signal() returns the previous value of the signal handler, or SIG_ERR on error. In the event of an error, errno is set to indicate the cause.#include <iostream>
#include <signal.h>
#include <unistd.h>
using namespace std;
void catchsig(int signum)
{
cout << "进程捕捉到了一个信号:" << signum << " "
<< "pid"
<< " " << getpid() << endl;
}
int main()
{
signal(SIGINT, catchsig);
while (true)
{
cout << "我是一个进程,我正在运行"
<< " "
<< "pid"
<< " " << getpid() << endl;
sleep(1);
}
return 0;
}
通过对比上面两张图,我们发现Ctrl + c 和发送2号命令,都调用了我们自定义的处理动作。所以 Ctrl + c的本质就是发送2号命令。

3.3、核心转储
上面的一张图,在信号的默认动作action中,term表示只终止进程,而还有的信号的动作是core,这个动作不仅会终止进程,还可以发生核心转储。这个与我们前面的进程等待的内容又有些关联了。

上图是进程等待中,父进程获取子进程信息的status位图结构。低7位保存信号,之前有一个core dump标志,该比特位表示是否发生了核心转储。
核心转储:当进程出现某种异常时,是否由os将当前进程在内存中的相关核心数据,转存到磁盘中。
一般来说,云服务器上的核心转储功能是被关闭了的。而我们可以使用ulimit -a 命令查看core文件,ulimit -c 大小 命令打开云服务器的核心转储功能。


那么核心转储有什么作用呢?我们使用下面的代码来看看:
#include <iostream>
#include <signal.h>
#include <unistd.h>
using namespace std;
void catchsig(int signum)
{
cout << "进程捕捉到了一个信号:" << signum << " "
<< "pid"
<< " " << getpid() << endl;
}
int main()
{
signal(SIGQUIT, catchsig);
while (true)
{
cout << "我是一个进程,我正在运行"
<< " "
<< "pid"
<< " " << getpid() << endl;
sleep(1);
int a = 100;
a /= 0;
}
return 0;
}
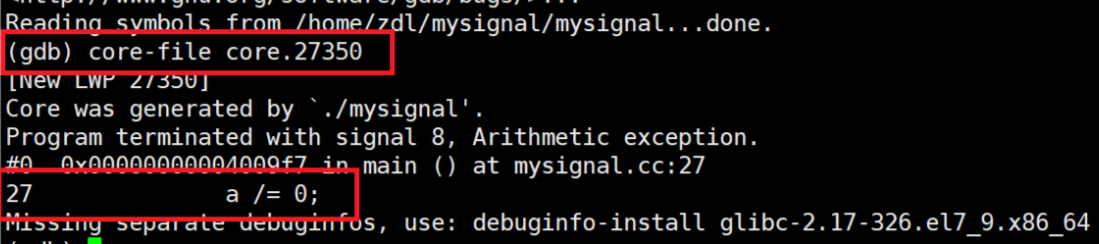
运行代码后生成了core文件,且以进程pid为后缀。

我们知道程序出错了,而有了core文件后,我们不用去一行一行找出错位置,使用core文件在gdb下可以直接定位出错位置,如下:
3.4、系统调用接口产生信号
3.4.1、kill
NAME
kill - send signal to a process
SYNOPSIS
#include <sys/types.h>
#include <signal.h>
int kill(pid_t pid, int sig);
Feature Test Macro Requirements for glibc (see feature_test_macros(7)):
kill(): _POSIX_C_SOURCE >= 1 || _XOPEN_SOURCE || _POSIX_SOURCE其实,我们常常使用的kill命令的底层所调用的就是该函数,下面我们可以模拟实现一下 kill命令的实现。
#include <iostream>
#include <cassert>
#include <sys/types.h>
#include <signal.h>
using namespace std;
static void Usage(const string &proc)
{
cout << "\nUsage:" << proc << " pid signo\n"
<< endl;
}
// ./mykill 2 pid
int main(int argc, char *argv[])
{
if (argc != 3)
{
Usage(argv[0]);
exit(1);
}
int signo = atoi(argv[1]);
int sigpid = atoi(argv[2]);
int n = kill(sigpid, signo);
assert(n == 0);
return 0;
}3.4.2、raise
作用:进程让os给自己发送某一个信号。
NAME
raise - send a signal to the caller
SYNOPSIS
#include <signal.h>
int raise(int sig);
DESCRIPTION
The raise() function sends a signal to the calling process or thread. In a single-threaded program it is equivalent to
kill(getpid(), sig);#include <iostream>
#include <cassert>
#include <unistd.h>
#include <sys/types.h>
#include <signal.h>
int main()
{
cout << "我开始运行了" << endl;
sleep(2);
raise(2);
return 0;
}3.4.3、abort
作用:让os给自己发一个6号信号。其实abort的底层也是去调用 raise(6)去实现的。
NAME
abort - cause abnormal process termination
SYNOPSIS
#include <stdlib.h>
void abort(void);#include <iostream>
#include <cassert>
#include <unistd.h>
#include<stdlib.h>
#include <sys/types.h>
#include <signal.h>
using namespace std;
int main()
{
cout << "我开始运行了" << endl;
sleep(2);
abort();
return 0;
}所以,总的来说,系统调用接口产生信号的具体过程就是: 用户调用系统接口——os执行对应的代码——os向目标进程写入信号——修改信号对应的比特位——进程后续对信号进行处理。
3.5、软件条件产生信号
~ 管道
在前面的进程间通信的管道中,我们讨论了一个问题:对于正在通信的两个进程,当管道的读端不读了,而且读端关闭了,但是写端一直在写。这时,写就没有任何意义了。我们验证了,在这个时候,os会通过发送13号信号的方式终止进程。因为管道是一个通过文件在内存级的实现,所以管道是一个软件,所以这种情况就是软件条件不满足而产生信号的一种情况。
~ 设置闹钟 alarm
#include <unistd.h> unsigned int alarm(unsigned int seconds);
调用alarm函数可以设定一个闹钟,也就是告诉内核在seconds秒之后给当前进程发SIGALRM信号,该信号的默认处理动作是终止当前进程。这个函数的返回值是0或者是以前设定的闹钟时间还余下的秒数。闹钟一旦触发了,将会自动移除。
我们可以使用该函数写一个能够测试自己的电脑CPU的计算能力的代码:
#include <iostream>
#include <cassert>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <signal.h>
using namespace std;
int count = 0;
void sigcath(int sig)
{
cout << "final count: "
<< " " << count << endl;
}
int main()
{
alarm(1);
signal(SIGALRM, sigcath);
while (true)
count++;
return 0;
}
我们也可以写一个代码来让os帮助我们每隔1秒就可以显示cout最新的计算结果
#include <iostream>
#include <cassert>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <signal.h>
using namespace std;
uint64_t count = 0;
void sigcath(int sig)
{
cout << "final count: "
<< " " << count << endl;
alarm(1);
}
int main()
{
alarm(1);
signal(SIGALRM, sigcath);
while (true)
count++;
return 0;
}3.6、硬件异常产生信号
~ 除0错误
我们来看一看下面的代码:
#include <iostream> #include <cassert> #include <unistd.h> #include <stdlib.h> #include <sys/types.h> #include <signal.h> using namespace std; void hander(int sig) { cout << "我捕捉了一个信号:" << " " << sig << endl; sleep(1); } int main() { signal(SIGFPE, hander); int a = 100; a /= 0; return 0; }
运行结果如下:

我们知道了如果代码中出现了除0错误,os会给进程发送8号信号,那么是怎么产生并发送的呢?
首先,计算以及各种信息的处理是由CPU这个硬件进行的。CPU中有一个寄存器,叫做状态寄存器,它含有一个位图,该位图上有溢出标记位。 CPU在进行计算时,发现代码中出现了除0错误,因此将溢出标记位由0改为1,进程异常,CPU将该进程切出。os会自动进行计算完成后,检测状态寄存器,当检查到溢出标记位为1时,os就会提取当前正在运行的进程的PID,给其发送8号信号。
那么为什么会是死循环打印呢?
上面讲到,溢出标记位由0改为1后,CPU就会将该进程切出,因为寄存器里面的数据是该进程的上下文,所以位图也会跟随进程一起切出。但是,我们虽然将信号进行了捕捉,但是并没有让进程退出,所以这个进程只是被切出去了,当CPU正常进行调度时,再次调度该进程,上下文恢复上去,os立马识别到了溢出标记位还是1,再次打印,如此反复。
所以,为了解决这个问题,我们要在捕捉函数最后加上 exit,让进程退出。
~ 野指针和越界访问
我们知道,指针变量必须通过地址才能找到目标位置。而我们语言上的地址是虚拟地址,所以我们前面讲了通过页表将物理地址和虚拟地址建立联系。但是事实上,我们是通过页表+MMU(memory manger unit,一个硬件)的方式将物理地址和虚拟地址建立联系的,所以当代码中出现了野指针或者越界访问时,因为这是一个非法地址,那么MMU一定会报错,它会将自己内部的寄存器进行标识,os就能够检测到,且知道是哪个进程的地址转化出错了。
四、信号的保存
4.1、相关概念
a. 信号递达:进程对信号的处理动作称为信号递达。
b. 信号未决:信号从产生到递达之间的这个状态称为信号未决。
c. 信号阻塞:被阻塞的信号产生时将保持在未决状态,直到进程解除对此信号的阻塞,才执行递达的动作。
阻塞和忽略是不同的,只要信号被阻塞就不会递达,而忽略是在递达之后可选的一种处理动作。
4.2、信号保存——三个数据结构
前面我们讲到,在进程的PCB中,存在一种位图是用来保存信号的,但是事实上有3种数据结构与信号是相关的。他们分别是pending位图,block位图,typedef void(*handler_t)(int signo),handler_t handler[32]={0}结构。
pending位图:该位图就是我们常说的用来保存信号的位图。
block位图:该位图比特位的位置与信号标号一一对应,比特位的内容代表该信号是否阻塞。
typedef void(*handler_t)(int signo),handler_t handler[32]={0}:这个是一个函数指针数组,这个数组在内核中有指针指向它,这个数组称为当前进程所匹配的信号递达的所有方法,数组下标代表信号的编号,数组的每一个元素都是一个函数指针(存函数地址),指向信号对应的处理方法。

4.3、信号集——sigset_t
上面讲到的三个结构都是属于进程PCB,是内核数据结构。所以os必定不会让用户直接访问这三个结构,更不能够让用户直接进行位移操作。那么如果用户想要得到pending和block位图该怎么办呢?于是,Linux就提供了一种数据类型信号集——sigset_t,用户可以直接使用。
4.3、信号操作函数
既然Linux提供了信号集,那么必定也通过了与之相关的各种方法,让用户能够去操作,这样用户根本就不需要关系在内核中这些结构到底是怎么样的。下面的5个函数就是对信号集进行操作的函数。
#include <signal.h>
int sigemptyset(sigset_t *set);
int sigfillset(sigset_t *set);
int sigaddset (sigset_t *set, int signo);
int sigdelset(sigset_t *set, int signo);
int sigismember(const sigset_t *set, int signo);sigpending:获取当前进程的 pending 信号集。信号发送的本质就是对pending位图进行修改。
NAME
sigpending - examine pending signals
SYNOPSIS
#include <signal.h>
int sigpending(sigset_t *set);
读取当前进程的未决信号集,通过set参数传出。调用成功则返回0,出错则返回-1。sigprocmask :读取或更改进程的信号屏蔽字(阻塞信号集) (block)
NAME
sigprocmask - examine and change blocked signals
SYNOPSIS
#include <signal.h>
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);下表说明了how参数的可选值及其作用:
| 选项 | 作用 |
| SIG_BLOCK | set包含了我们希望添加到当前信号屏蔽字的信号 |
| SIG_UNBLOCK | set包含了我们希望从当前信号屏蔽字中解除阻塞的信号 |
| SIG_SETMASK | 设置当前信号屏蔽字为set所指向的信号 |
注:9号信号是不能被捕捉或阻塞的。