0、前言
参考:
【【STM32F4+CubeMX零基础快速入门】定时器中断 PWM输出】 https://www.bilibili.com/video/BV1f54y1Y7Ls/?share_source=copy_web&vd_source=77e36f24add8dc77c362748ffb980148
理论
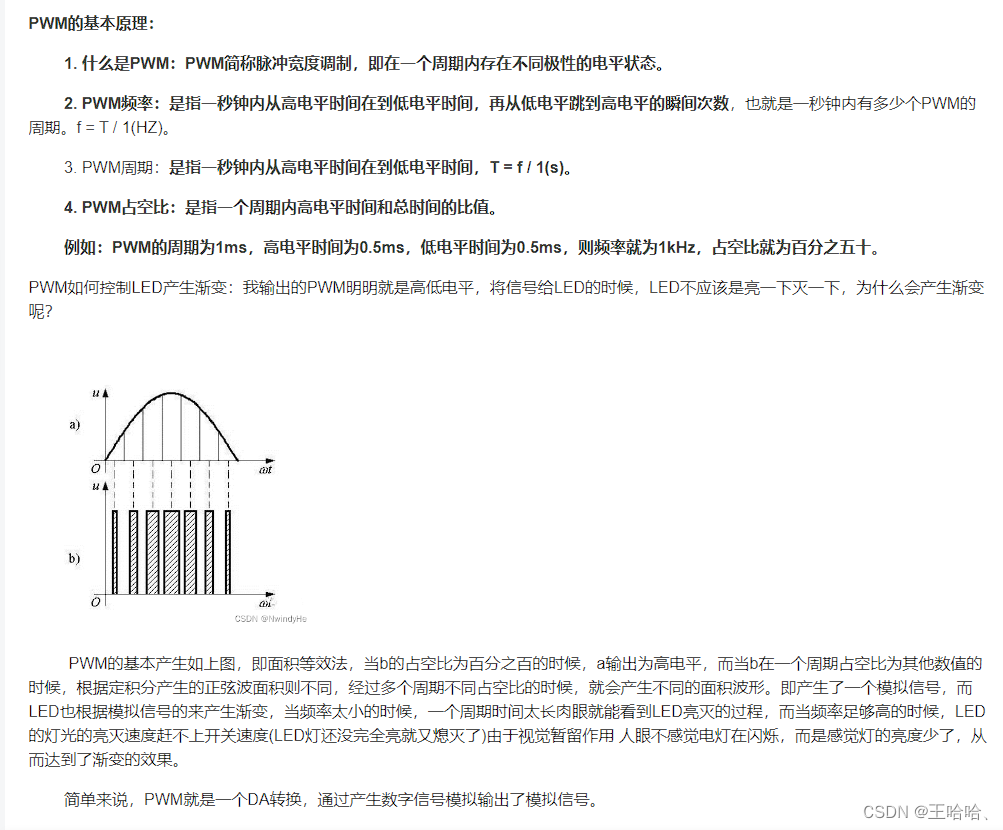
PWM生成原理
Cubemx
电路
TIM1.Channel1,2,3,4, PA0~3,
代码
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "ServoMotor.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
/*********** 实例化舵机 **************/
ServoMotor servomotor_left_front = {
.servomotordata = {
.targetPosition = 0, // 初始目标位置
.isMoving = false,
.channel = TIM_CHANNEL_1, // PA0
},
.SetTargetPosition = ServoMotor_SetTargetPosition // 设置目标位置的函数
}; // 实例化舵机
ServoMotor_Init(&servomotor_left_front); // 初始化舵机
ServoMotor servomotor_left_back = {
.servomotordata = {
.targetPosition = 0, // 初始目标位置
.isMoving = false,
.channel = TIM_CHANNEL_2, // PA1
},
.SetTargetPosition = ServoMotor_SetTargetPosition // 设置目标位置的函数
}; // 实例化舵机
ServoMotor_Init(&servomotor_left_back); // 初始化舵机
ServoMotor servomotor_right_front = {
.servomotordata = {
.targetPosition = 0,
.isMoving = false,
.channel = TIM_CHANNEL_3, // PA2
},
.SetTargetPosition = ServoMotor_SetTargetPosition};
ServoMotor_Init(&servomotor_right_front);
ServoMotor servomotor_right_back = {
.servomotordata = {
.targetPosition = 0,
.isMoving = false,
.channel = TIM_CHANNEL_4, // PA3
},
.SetTargetPosition = ServoMotor_SetTargetPosition};
ServoMotor_Init(&servomotor_right_back);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
servomotor_left_front.SetTargetPosition(&servomotor_left_front.servomotordata, 180);
servomotor_left_front.SetTargetPosition(&servomotor_left_front.servomotordata, 0);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 72 - 1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 20000 - 1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
/*Configure GPIO pin : PA4 */
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
// void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
// {
// HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_4);
// }
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
servomotor.h
#ifndef __SERVOMOTOR_H
#define __SERVOMOTOR_H
#include "stm32f1xx_hal.h"
#include <stdbool.h> // 引入布尔类型的定义
#include "main.h"
typedef struct
{
int targetPosition; // 目标位置
bool isMoving; // 是否正在移动
uint32_t channel; // 定时器通道
} ServoMotorData;
// 定义函数指针类型
typedef void (*ServoMotor_SetTargetPosition_Function)(ServoMotorData *servomotordata, int angle);
// 修改ServoMotor结构体,使用上面定义的函数指针类型
typedef struct
{
ServoMotorData servomotordata;
ServoMotor_SetTargetPosition_Function SetTargetPosition; // 使用上面定义的函数指针类型
} ServoMotor;
// 函数声明
void ServoMotor_Init(ServoMotor *servomotor);
void ServoMotor_SetTargetPosition(ServoMotorData *servomotordata, int angle);
#endif // __SERVOMOTOR_H
servomotor.c
#include "ServoMotor.h"
void ServoMotor_Init(ServoMotor *servomotor)
{
servomotor->servomotordata.channel = 0;
servomotor->servomotordata.isMoving = false;
HAL_TIM_PWM_Start(&htim2, servomotor->servomotordata.channel);
}
void ServoMotor_SetTargetPosition(ServoMotorData *sermotor, int angle)
{
if (angle < 0)
{
angle = 0; // 限制角度范围为0到180度
}
else if (angle > 180)
{
angle = 180;
}
int compare_value = 10 + 2*angle/9;
__HAL_TIM_SET_COMPARE(&htim2, sermotor->channel, compare_value);
HAL_Delay(1000); // 延时给舵机转动的反应时间
}