二叉树
1、什么是二叉树
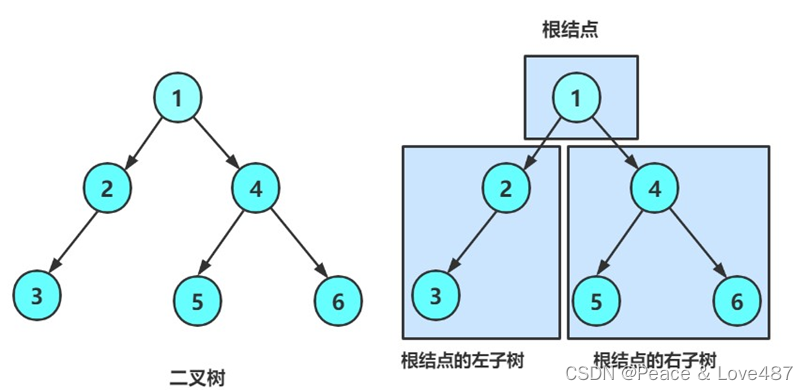
二叉树(Binar Tree)是n(n>=0)个结点的优先集合,该集合或者为空集(称为空二叉树),或者由一个根结点和两颗互不相交的、分别称为根结点的左子树和右子树的二叉树构成。
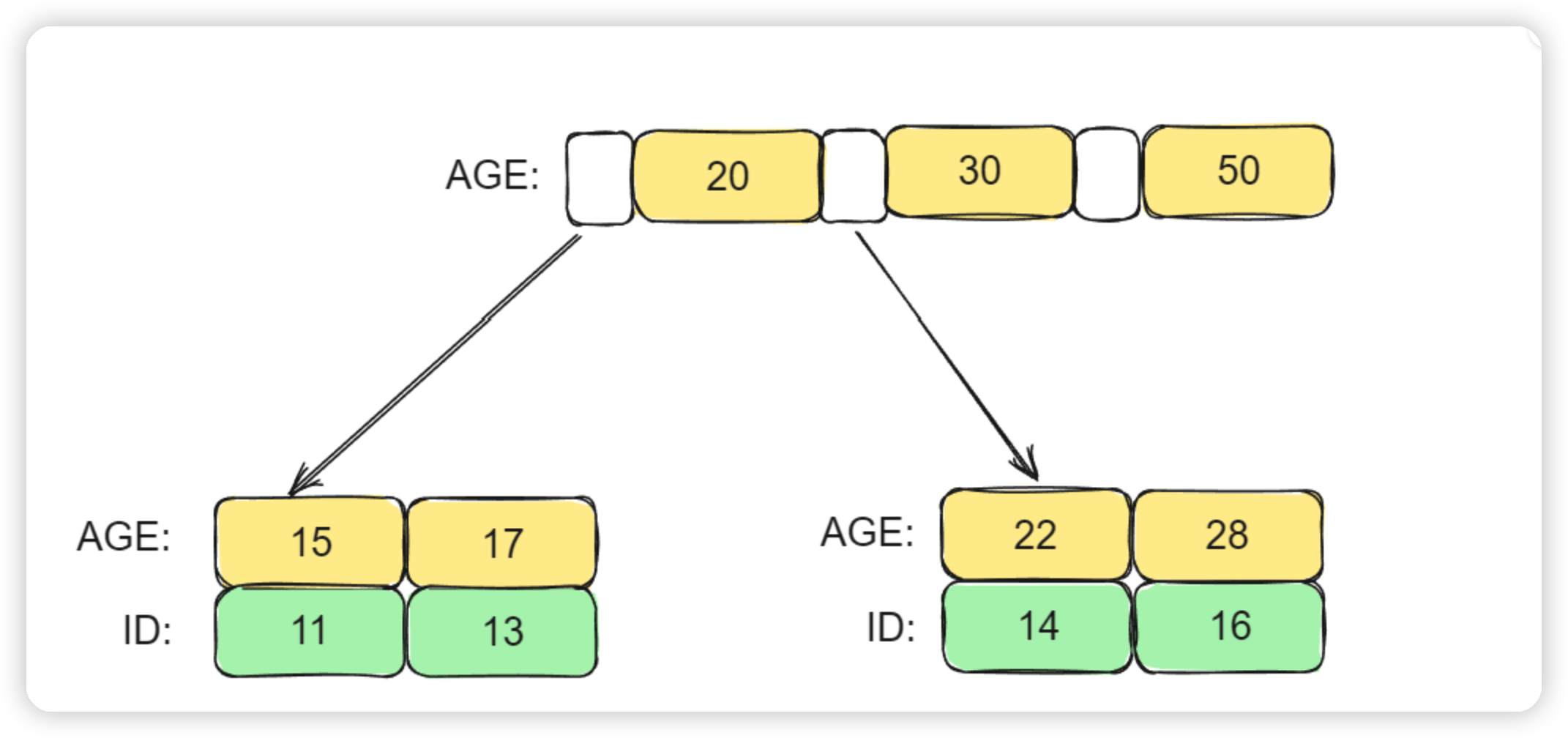
这里给张图,能更直观的感受二叉树:
2、二叉树的特点
从上图可以看出二叉树的几个特点:
- 二叉树不存在度大于2的结点,每个结点最多有两颗子树;
- 左子树和右子树是有顺序的,次序不能颠倒;
- 即使树中的某个结点只有一颗子树,那也要区分它是左子树还是右子树。
讲到这那就不得不提及二叉树的五种基本形态:
- 空二叉树;
- 只有一个根节点;
- 根结点只有左子树;
- 根结点只有右子树;
- 根结点既有左子树又有右子树。

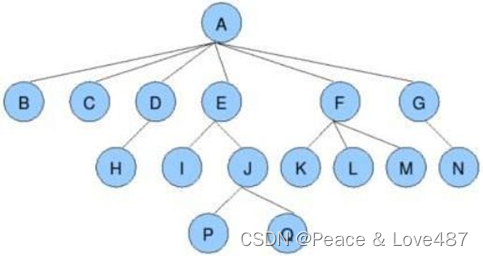
如下图所示,这棵树就不符合二叉树的条件,所以它就不是一颗二叉树。
3、几种特殊的二叉树
- 斜树:顾名思义,斜树一定是要斜的,但是往哪斜是有讲究的。所有结点只有左子树的二叉树叫左斜树。所有结点只有右子树的二叉树叫右斜树。这两者统称为斜树。

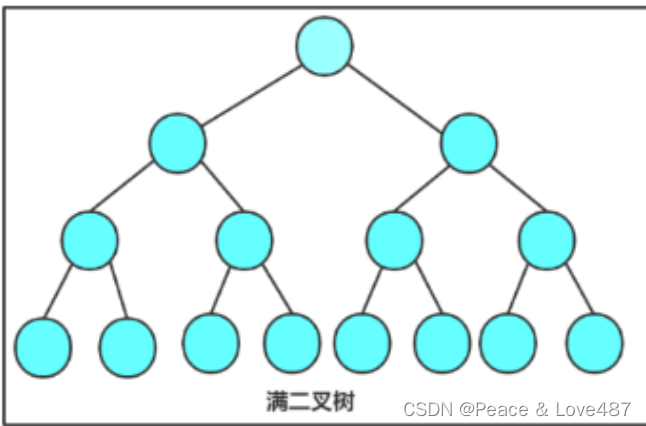
- 满二叉树:在一棵二叉树中,如果所有分支结点都存在左子树和右子树,并且所有叶子都在同一层上,这样的二叉树称为满二叉树。
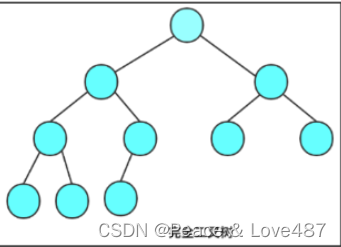
- 完全二叉树:完全二叉树是效率很高的数据结构,完全二叉树是由满二叉树而引出来的。对于深度为K的,有n个结点的二叉树,当且仅当其每一个结点都与深度为K的满二叉树中编从1至n的结点一一对应时称之为完全二叉树。 要注意的是满二叉树是一种特殊的完全二叉树。
4、二叉树的性质
4.1 满二叉树的性质
- 叶子只能出现在最下一层。出现在其他层就不可能达到平衡;
- 非叶子节点的度一定是2,否则就是“缺胳膊少腿”了;
- 在同样深度的二叉树中,满二叉树的结点个数最多,叶子最多。
4.2 完全二叉树的性质
- 叶子结点只能出现在最下两层;
- 最下层的叶子一定集中在左部连续位置;
- 倒数两层,若有叶子结点,一定都在右部连续位置;
- 如果结点度为1,则该结点只有左孩子,即不存在只有右孩子的情况;
- 同样结点数的二叉树,完全二叉树的深度最小。
4.3 二叉树的性质
-
若规定根节点的层数为 1 ,则一棵非空二叉树的 第 i 层上最多有2^(i-1) 个结点.
-
若规定根节点的层数为1,则深度为h的二叉树的最大结点数是2^h - 1.
-
若规定根节点的层数为 1 ,具有 n 个结点的满二叉树的深度 , h= log2(n+1). (ps:是log 以 2 为底,n+1 为对数 ).
-
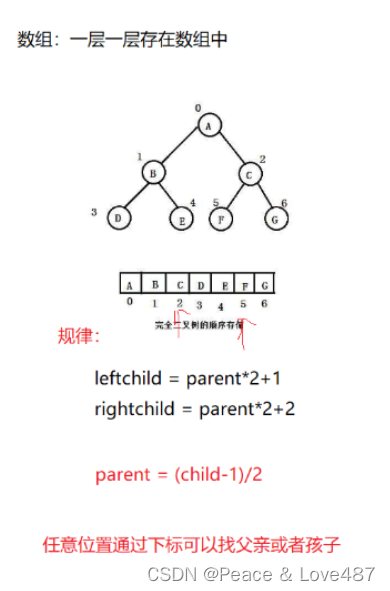
对于具有n个结点的完全二叉树,如果按照从上至下从左至右的数组顺序对所有节点从0开始编号,则对 于序号为i的结点有:1. 若 i>0 , i 位置节点的双亲序号: (i-1)/2 ; i=0 , i 为根节点编号,无双亲节点2. 若 2i+1<n ,左孩子序号: 2i+1 , 2i+1>=n 否则无左孩子3. 若 2i+2<n ,右孩子序号: 2i+2 ,2i+2>=n否则无右孩子
-
对任何一棵二叉树, 如果度为 0 其叶结点个数为n0 , 度为 2 的分支结点个数为n2 , 则有 n0=n2 + 1.
5、现实中的二叉树

6、二叉树的存储结构
二叉树一般可以使用两种存储结构,一种是顺序存储结构,另一种则是链式存储结构。
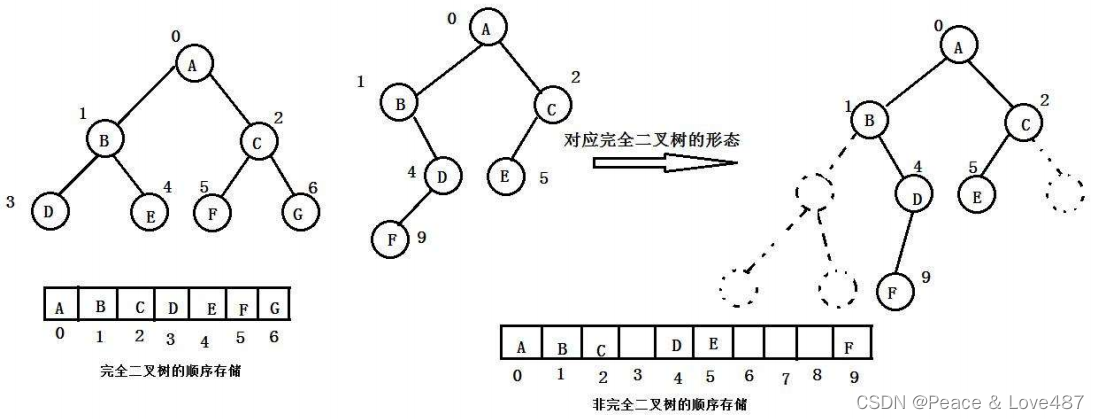
6.1 顺序存储结构
二叉树的顺序存储结构计算用一个一维数组存储二叉树中的结点。一般使用数组只适合表示完全二叉树,因为不是完全二叉树会有空间的浪费。而现实中使用中只有堆才会使用数组来存储。
6.2 链式存储结构
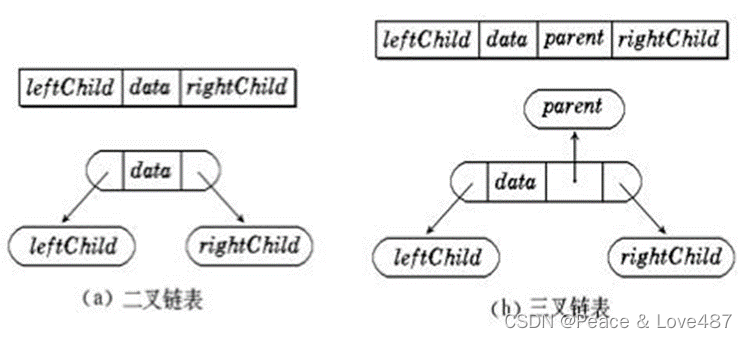
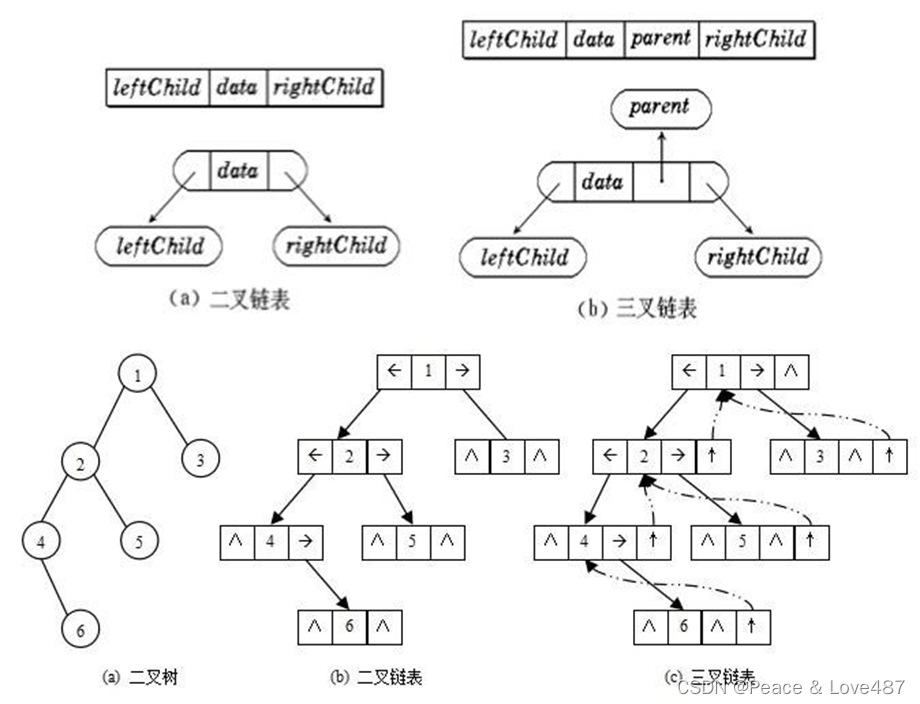
二叉树的链式存储结构是指,用链表来表示一棵二叉树,即用链来指示元素的逻辑关系。 通常的方法是链表中每个结点由三个域组成,数据域和左右指针域,左右指针分别用来给出该结点左孩子和右孩子所 在的链结点的存储地址 。链式结构又分为二叉链和三叉链。
typedef int BTDataType;
// 二叉链
struct BinaryTreeNode
{
struct BinTreeNode* _pLeft; // 指向当前节点左孩子
struct BinTreeNode* _pRight; // 指向当前节点右孩子
BTDataType _data; // 当前节点值域
}
// 三叉链
struct BinaryTreeNode
{
struct BinTreeNode* _pParent; // 指向当前节点的双亲
struct BinTreeNode* _pLeft; // 指向当前节点左孩子
struct BinTreeNode* _pRight; // 指向当前节点右孩子
BTDataType _data; // 当前节点值域
};
7、二叉树的顺序存储结构
普通的二叉树是不适合用数组来存储的,因为可能会存在大量的空间浪费。而完全二叉树更适合使用顺序结 构存储。现实中我们通常把堆
(
一种二叉树
)
使用顺序结构的数组来存储,需要注意的是这里的堆和操作系统
虚拟进程地址空间中的堆是两回事,一个是数据结构,一个是操作系统中管理内存的一块区域分段。
7.1 堆的概念和结构
如果有一个关键码的集合
K = { k0
,k1 ,k2 ,
…
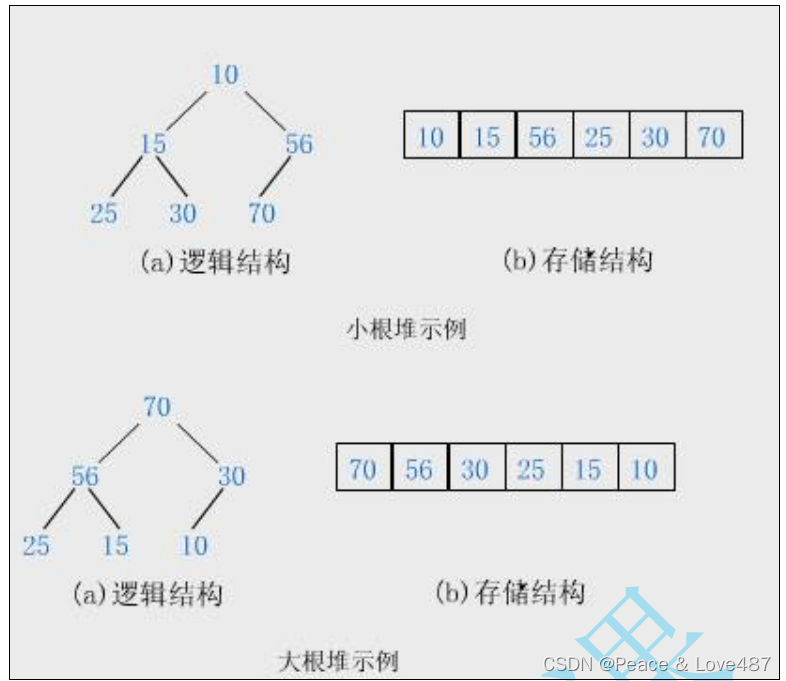
,kn-1},把它的所有元素按完全二叉树的顺序存储方式存储 在一个一维数组中,并满足: ki<=k2i+2 且 ki<=k2i+1 (ki >=k2i+1 且 ki>=k2i+2 ) i = 0,
1,
2…,则称为小堆
(
或大堆
)
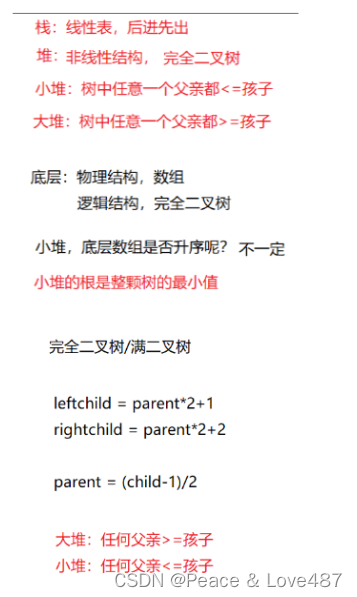
。将根节点最大的堆叫做最大堆或大根堆,根节点最小的堆叫做最小堆或小根堆。
堆的性质:
堆中某个节点的值总是不大于或不小于其父节点的值;
堆总是一棵完全二叉树。
7.2 堆的实现
实现堆的接口函数:
#pragma once
#include<stdio.h>
#include<stdlib.h>
#include<assert.h>
#include<stdbool.h>
#include<time.h>
#include<string.h>
typedef int HPDataType;
typedef struct Heap
{
//数组存储
HPDataType* a; //数组
int size; //数据的个数
int capacity; //数组长度
}HP;
//初始化
void HeapInit(HP* php);
//释放空间
void HeapDestory(HP* php);
//插入数据
void HeapPush(HP* php, HPDataType x);
//打印数据
void HeapPrint(HP* php);
//删除数据
void HeapPop(HP* php);
//获取第一个数据
HPDataType HeapTop(HP* php);
//判断是否为空
bool HeapEmpty(HP* php);函数的具体实现
#define _CRT_SECURE_NO_WARNINGS 1
#include"Heap.h"
//初始化
void HeapInit(HP* php)
{
assert(php);
php->a = NULL;
php->size = php->capacity = 0;
}
//释放空间
void HeapDestory(HP* php)
{
assert(php);
free(php->a);
php->a = NULL;
php->size = php->capacity = 0;
}
//交换数据
void Swap(HPDataType* x, HPDataType* y)
{
HPDataType tmp = *x;
*x = *y;
*y = tmp;
}
//结点向上调整 -- 小堆
void AdJustUp(HPDataType* a, int child)
{
int parent = (child - 1) / 2;
//循环判定条件为孩子结点下标大于0
while (child > 0)
{
//如果孩子结点值小于父亲节点就相互交换
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
child = parent;
parent = (parent - 1) / 2;
}
//如果孩子结点值大于或等于父亲节点值就直接跳出循环
else
{
break;
}
}
}
//向下调整
void AdJustDown(HPDataType* a, int n, int parent)
{
int child = 2 * parent + 1;
while (child < n )
{
//找出左孩子和右孩子中较小的那个
if (child+1 < n && a[child + 1] > a[child])
{
++child;
}
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
//继续向下调整
parent = child;
child = 2 * parent + 1;
}
else
{
break;
}
}
}
//插入数据
void HeapPush(HP* php, HPDataType x)
{
assert(php);
//扩容
if (php->capacity == php->size)
{
int newcapacity = php->capacity == 0 ? 4 : 2 * php->capacity;
HPDataType* tmp = (HPDataType*)realloc(php->a, sizeof(HPDataType) * newcapacity);
if (tmp == NULL)
{
perror("realloc fail");
exit(-1);
}
php->a = tmp;
php->capacity = newcapacity;
}
php->a[php->size] = x;
php->size++;
//插入新元素后,要使原来的堆还是小堆,就得向上调整
AdJustUp(php->a , php->size-1);
}
//打印数据
void HeapPrint(HP* php)
{
assert(php);
for (int i = 0; i < php->size; i++)
{
printf("%d ", php->a[i]);
}
}
//删除数据
void HeapPop(HP* php)
{
assert(php);
assert(php->size > 0);
//交换第一个和最后一个数据
Swap(&php->a[0], &php->a[php->size - 1]);
--php->size;
AdJustDown(php->a, php->size, 0);
}
//获取第一个数据
HPDataType HeapTop(HP* php)
{
assert(php);
assert(php->size > 0);
return php->a[0];
}
//判断是否为空
bool HeapEmpty(HP* php)
{
assert(php);
return php->size == 0;
}