1、按键简介
常态下,独立按键是断开的,按下的时候才闭合。每个独立按键会单独占用一个 IO 口,通过 IO 口的高低电平判断按键的状态。但是按键在闭合和断开的时候,都存在抖动现象,即按键在闭合时不会马上就稳定的连接,断开时也不会马上断开。这是机械触点,无法避免。独立按键抖动波形图如下:
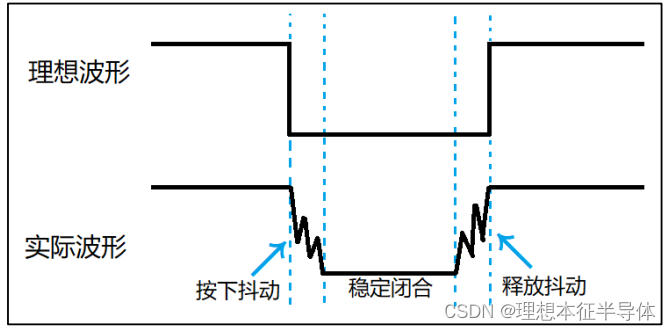
图中的按下抖动和释放抖动的时间一般为 5~10ms, 如果在抖动阶段采样, 其不稳定状态可能出现一次按键动作被认为是多次按下的情况。为了避免抖动可能带来的误操作,我们要做的措施就是给按键消抖(即采样稳定闭合阶段)。消抖方法分为硬件消抖和软件消抖,我们常用软件的方法消抖。
软件消抖:方法很多, 我们例程中使用最简单的延时消抖。 检测到按键按下后,一般进行10ms 延时,用于跳过抖动的时间段,如果消抖效果不好可以调整这个 10ms 延时,因为不同类型的按键抖动时间可能有偏差。待延时过后再检测按键状态,如果没有按下,那我们就判断这是抖动或者干扰造成的;如果还是按下,那么我们就认为这是按键真的按下了。对按键释放的判断同理。
硬件消抖:利用 RC 电路的电容充放电特性来对抖动产生的电压毛刺进行平滑出来,从而实现消抖。
本实验采用软件消抖的方法。
2、GPIO输入寄存器(IDR)
本实验我们将会用到 GPIO 端口输入数据寄存器,下面来介绍一下,该寄存器用于存储 GPIOx 的输入状态,它连接到施密特触发器上, IO 口外部的电平信号经过触发器后,模拟信号就被转化成 0 和 1 这样的数字信号,并存储到该寄存器中。寄存器描述如图:
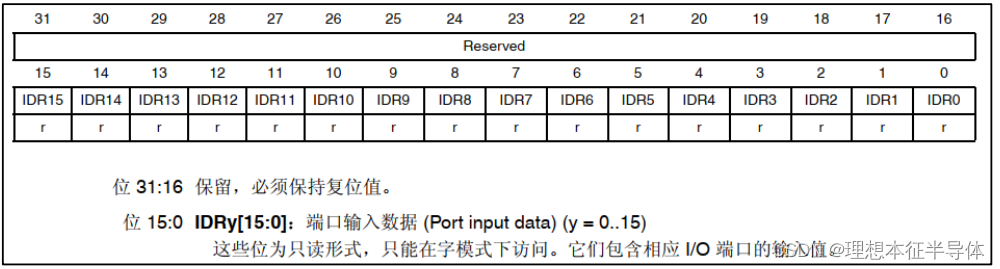
该寄存器低 16 位有效,分别对应每一组 GPIO 的 16 个引脚。当 CPU 访问该寄存器,如果对应的某位为 0(IDRy=0),则说明该 IO 口输入的是低电平,如果是 1(IDRy=1),则表示输入的是高电平, y=0~15。
3、硬件设计
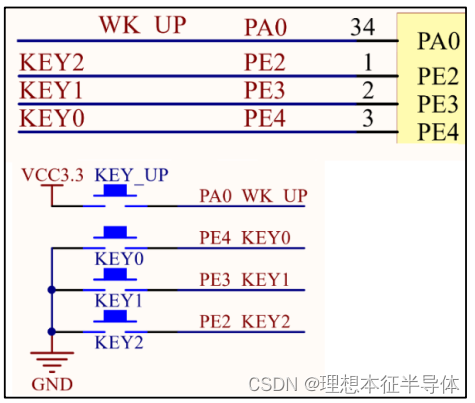
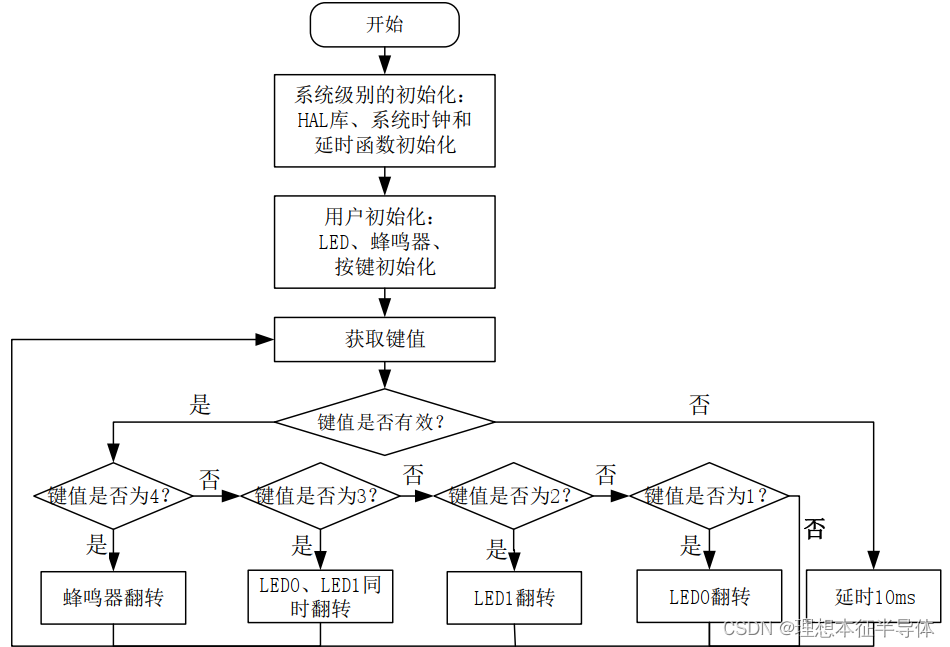
本实验通过开发板上的四个独立按键控制 LED 灯: KEY0 控制 LED0 翻转, KEY1 控制 LED1 翻转, KEY2 控制 LED0、 LED1 同时翻转, KEY_UP 控制蜂鸣器翻转。
4、程序设计
HAL_GPIO_ReadPin 函数是 GPIO 口的读引脚函数。其声明如下:
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
函数描述:用于读取 GPIO 引脚状态,通过 IDR 寄存器读取。
形参 1 是端口号,可以选择范围: GPIOA~GPIOG。
形参 2 是引脚号,可以选择范围: GPIO_PIN_0 到 GPIO_PIN_15。
函数返回值:引脚状态值 0 或者 1
GPIO 输入配置步骤
1)使能对应 GPIO 时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();2) 设置对应 GPIO 工作模式(上拉/下拉输入)
本实验 GPIO 使用输入模式(带上拉/下拉),从而可以读取 IO 口的状态,实现按键检测, GPIO 模式通过函数 HAL_GPIO_Init 设置实现。
3) 读取 GPIO 引脚高低电平
在配置好 GPIO 工作模式后,我们就可以通过 HAL_GPIO_ReadPin 函数读取 GPIO 引脚的高低电平,从而实现按键检测了。
key.h
#ifndef __KEY_H
#define __KEY_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* 引脚 定义 */
#define KEY0_GPIO_PORT GPIOE
#define KEY0_GPIO_PIN GPIO_PIN_4
#define KEY0_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOE_CLK_ENABLE(); }while(0) /* PE口时钟使能 */
#define KEY1_GPIO_PORT GPIOE
#define KEY1_GPIO_PIN GPIO_PIN_3
#define KEY1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOE_CLK_ENABLE(); }while(0) /* PE口时钟使能 */
#define KEY2_GPIO_PORT GPIOE
#define KEY2_GPIO_PIN GPIO_PIN_2
#define KEY2_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOE_CLK_ENABLE(); }while(0) /* PE口时钟使能 */
#define WKUP_GPIO_PORT GPIOA
#define WKUP_GPIO_PIN GPIO_PIN_0
#define WKUP_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
/******************************************************************************************/
#define KEY0 HAL_GPIO_ReadPin(KEY0_GPIO_PORT, KEY0_GPIO_PIN) /* 读取KEY0引脚 */
#define KEY1 HAL_GPIO_ReadPin(KEY1_GPIO_PORT, KEY1_GPIO_PIN) /* 读取KEY1引脚 */
#define KEY2 HAL_GPIO_ReadPin(KEY2_GPIO_PORT, KEY2_GPIO_PIN) /* 读取KEY2引脚 */
#define WK_UP HAL_GPIO_ReadPin(WKUP_GPIO_PORT, WKUP_GPIO_PIN) /* 读取WKUP引脚 */
#define KEY0_PRES 1 /* KEY0按下 */
#define KEY1_PRES 2 /* KEY1按下 */
#define KEY2_PRES 3 /* KEY2按下 */
#define WKUP_PRES 4 /* KEY_UP按下(即WK_UP) */
void key_init(void); /* 按键初始化函数 */
uint8_t key_scan(uint8_t mode); /* 按键扫描函数 */
#endif
key.c
#include "./BSP/KEY/key.h"
#include "./SYSTEM/delay/delay.h"
/**
* @brief 按键初始化函数
* @param 无
* @retval 无
*/
void key_init(void)
{
GPIO_InitTypeDef gpio_init_struct; /* GPIO配置参数存储变量 */
KEY0_GPIO_CLK_ENABLE(); /* KEY0时钟使能 */
KEY1_GPIO_CLK_ENABLE(); /* KEY1时钟使能 */
KEY2_GPIO_CLK_ENABLE(); /* KEY2时钟使能 */
WKUP_GPIO_CLK_ENABLE(); /* WKUP时钟使能 */
gpio_init_struct.Pin = KEY0_GPIO_PIN; /* KEY0引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY0_GPIO_PORT, &gpio_init_struct); /* KEY0引脚模式设置,上拉输入 */
gpio_init_struct.Pin = KEY1_GPIO_PIN; /* KEY1引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY1_GPIO_PORT, &gpio_init_struct); /* KEY1引脚模式设置,上拉输入 */
gpio_init_struct.Pin = KEY2_GPIO_PIN; /* KEY2引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY2_GPIO_PORT, &gpio_init_struct); /* KEY2引脚模式设置,上拉输入 */
gpio_init_struct.Pin = WKUP_GPIO_PIN; /* WKUP引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLDOWN; /* 下拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(WKUP_GPIO_PORT, &gpio_init_struct); /* WKUP引脚模式设置,下拉输入 */
}
/**
* @brief 按键扫描函数
* @note 该函数有响应优先级(同时按下多个按键): WK_UP > KEY2 > KEY1 > KEY0!!
* @param mode:0 / 1, 具体含义如下:
* @arg 0, 不支持连续按(当按键按下不放时, 只有第一次调用会返回键值,
* 必须松开以后, 再次按下才会返回其他键值)
* @arg 1, 支持连续按(当按键按下不放时, 每次调用该函数都会返回键值)
* @retval 键值, 定义如下:
* KEY0_PRES, 1, KEY0按下
* KEY1_PRES, 2, KEY1按下
* KEY2_PRES, 3, KEY2按下
* WKUP_PRES, 4, WKUP按下
*/
uint8_t key_scan(uint8_t mode)
{
static uint8_t key_up = 1; /* 按键按松开标志 */
uint8_t keyval = 0;
if (mode) key_up = 1; /* 支持连按 */
if (key_up && (KEY0 == 0 || KEY1 == 0 || KEY2 == 0 || WK_UP == 1)) /* 按键松开标志为1, 且有任意一个按键按下了 */
{
delay_ms(10); /* 去抖动 */
key_up = 0;
if (KEY0 == 0) keyval = KEY0_PRES;
if (KEY1 == 0) keyval = KEY1_PRES;
if (KEY2 == 0) keyval = KEY2_PRES;
if (WK_UP == 1) keyval = WKUP_PRES;
}
else if (KEY0 == 1 && KEY1 == 1 && KEY2 == 1 && WK_UP == 0) /* 没有任何按键按下, 标记按键松开 */
{
key_up = 1;
}
return keyval; /* 返回键值 */
}