目前业内解决大模型问题,基本以多节点、分布式方案为主。分布式方案具体的实施时,又分为数据并行、参数并行、流水线并行等,针对具体的业务场景采取合适的并行方案方可带来更高的效率。
后续结合业内主流的分布式框架,具体介绍各种并行的思路以及可能带来的收益。
数据并行
一些基础知识的补充:
Pytorch DDP分布式细节分享
![[图片]](https://img-blog.csdnimg.cn/direct/8aaa100184ff4cb9979b16bd10521b64.png#pic_center)
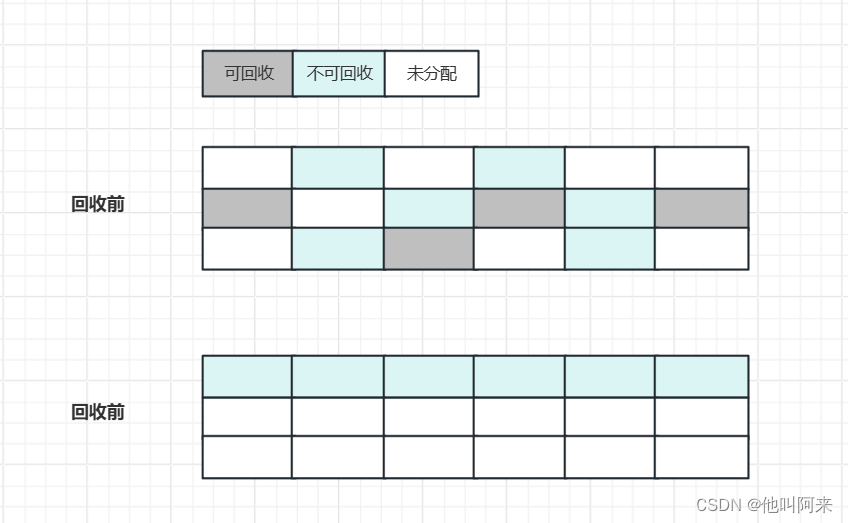
ZeRO(零冗余优化)
零冗余优化的核心思想:用通信换显存,数据算完即废,等需要的时候,再同步过来。
从效果来说,零冗余优化属于数据并行+张量并行,从根本来说属于数据并行。
模型在训练时需要的显存大小,假设模型的参数W大小是phi,以byte为单位,存储如下:
![[图片]](https://img-blog.csdnimg.cn/direct/c97e6f278db04d869d255da57fda4ceb.png#pic_center)
结论:优化器、模型参数、梯度是占据显存的主要数据。
将优化器、模型参数、梯度等数据进行切分可达到不同程度的显存优化,可分为zero1、zero2、zero3
zero1(优化器切分)
![[图片]](https://img-blog.csdnimg.cn/direct/d473ba7f112147a39b9e153bdfd52029.png#pic_center)
由于每块GPU上只保管部分optimizer states,因此只能将相应的W(蓝色部分)进行更新;需要对W做一次All-Gather,从别的GPU上把更新好的部分W取回来,额外产生单卡通讯量phi。
zero2(优化器+梯度切分)
![[图片]](https://img-blog.csdnimg.cn/direct/63152f7ae7ec41feb6c792d25a52fd2e.png#pic_center)
- 对梯度做一次Reduce-Scatter,保证每个GPU上所维持的那块梯度是聚合梯度。单卡通讯量phi。
- 每块GPU用自己对应的O和G去更新相应的W。更新完毕后,每块GPU维持了一块更新完毕的W。同理,对W做一次All-Gather,将别的GPU算好的W同步到自己这来。单卡通讯量phi。
zero3(优化器+梯度+参数切分)
![[图片]](https://img-blog.csdnimg.cn/direct/202b2f0edf6a4d54a45ea5cc0c56ad47.png#pic_center)
- 做forward时,对W做一次All-Gather,取回分布在别的GPU上的W,得到一份完整的W,单卡通讯量phi 。forward做完,立刻把不是自己维护的W抛弃。
- 做backward时,对W做一次All-Gather,取回完整的W,单卡通讯量phi。backward做完,立刻把不是自己维护的W抛弃。
- 做完backward,算得一份完整的梯度G,对G做一次Reduce-Scatter,从别的GPU上聚合自己维护的那部分梯度,单卡通讯量phi。聚合操作结束后,立刻把不是自己维护的G抛弃。
优化效果:

用1.5倍的通讯开销,换回近60倍的显存
基于zero的实现的工具有:
- 微软Deepspeed
- Pytorch fsdp(1.11+)
参考论文:
zero-deepspeed.pdf
模型并行
在数据并行训练中,一个明显的特点是每个 GPU 持有整个模型权重的副本,这就带来了冗余问题。如果将模型参数、优化器等分割在一个设备整列,将有效缓解显存的压力和副本冗余。
模型并行,主流上分为张量并行和流水线并行。
张量并行为层内并行,对模型 Transformer 层内进行分割、流水线为层间并行,对模型不同的 Transformer 层间进行分割。
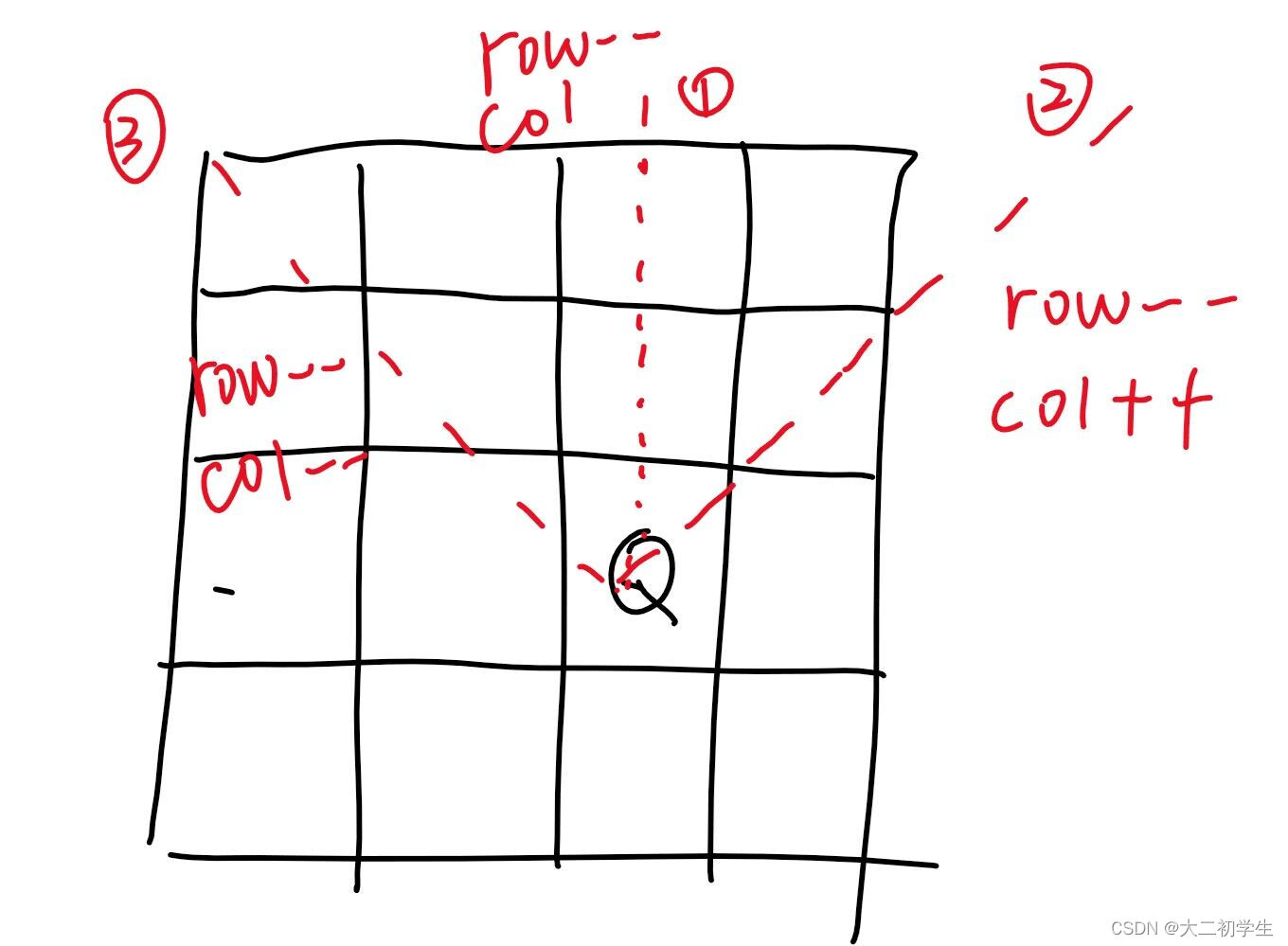
张量并行(TP)
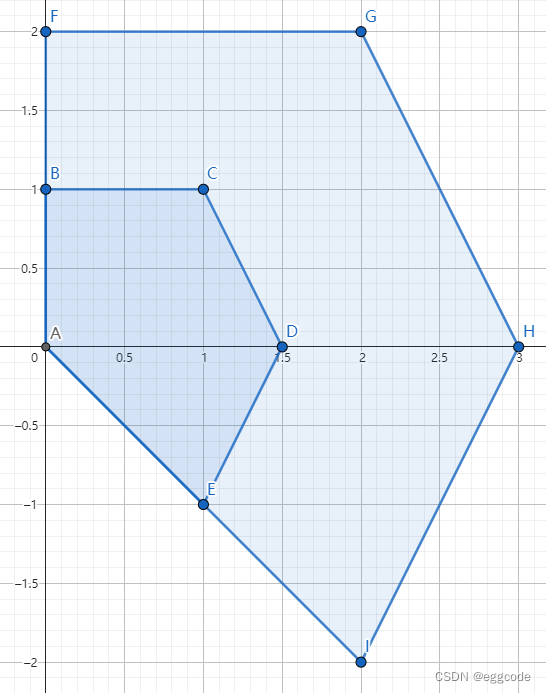
张量并行可视为层内并行,可分为按行进行切分和按列进行切分,分别对应行并行(Row Parallelism)与列并行(Column Parallelism)。
![[图片]](https://img-blog.csdnimg.cn/direct/37cf198d33b446de873215832d58b22f.png#pic_center)
受 GSPMD、Oneflow 和 TF DTensor 的启发,PyTorch 从 2.0.0 开始引入 DTensor,通过DTensor抽象,我们可以无缝构建张量并行。
参考论文:
Megatron-LM 1D 2020-03-13
流水线并行(PP)
经典的流水线并行范式有Google推出的Gpipe,和微软推出的PipeDream。两者的推出时间都在2019年左右,大体设计框架一致。主要差别为:在梯度更新上,Gpipe是同步的,PipeDream是异步的。
多维混合并行
在进行上百亿/千亿级以上参数规模的超大模型预训练时,通常会组合多种并行技术一起使用。
常见的组合方式:
DP+PP
3D 并行(DP + PP + TP)
ZeRO-DP + PP + TP

![[图解]产品经理-竞赛题解析:阿布思考法和EA](https://img-blog.csdnimg.cn/direct/6bf467128dec4b3d817a0d692031e424.png)


![【Linux】-Redis安装部署[15]](https://img-blog.csdnimg.cn/direct/e9fb30f4a772467db564502068a98b4e.png)