1 分割对象
EfficientSAM
https://github.com/yformer/EfficientSAM
2 计算在图像中最高点即y值最小点
import os
import cv2
def read_images(folder_path):
image_files = [f for f in os.listdir(folder_path) if
f.endswith(".jpg") or f.endswith(".png")] # 获取文件夹中所有的jpg和png图片文件
sorted_image_files = sorted(image_files, key=lambda x: int(''.join(filter(str.isdigit, os.path.splitext(x)[0]))))
images = [] # 用来存储读取的图像
for filename in sorted_image_files:
# print(filename)
image_path = os.path.join(folder_path, filename) # 构建完整的文件路径
image = cv2.imread(image_path) # 使用OpenCV库读取图像文件
# image = cv2.resize(image, (0, 0), fx=0.5, fy=0.5, interpolation=cv2.INTER_LINEAR)
images.append(image) # 将图像添加到列表中
return images
def reprocess_image(img):
# 读入图片
# for i in range(len(images)):
# img = images[i]
# 显示图片
# 将彩色图片转换成灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化处理
# ret, thresh = cv2.threshold(gray, 50, 255, 0)
# cv2.imshow("Binary Image", thresh)
# cv2.waitKey(0)
contour_image = img.copy()
# 直接用灰度图寻找轮廓
contours, hierarchy = cv2.findContours(gray, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 二值化处理后的图像再处理轮廓
# contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(contour_image, contours, -1, (0, 255, 0), 3)
cv2.imshow("contour_image", contour_image)
cv2.waitKey(0)
return contours, img
def find_highest_y_point(contours, img):
_highest_point = (0, 0)
max_y = img.shape[0]
for contour in contours:
for point in contour:
if point[0][1] < max_y:
max_y = point[0][1]
_highest_point = (point[0][0], point[0][1])
# print(highest_point[0])
# print(highest_point[1])
# 在图像上标记最高点
cv2.circle(img, _highest_point, 5, (0, 0, 255), -1)
# 显示结果
cv2.imshow('Highest Point', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
return _highest_point
if __name__ == '__main__':
folder_path = "final-images" # 替换为你的文件夹路径
highest_point = (0, 0)
real_highest_y = 300
if(read_images(folder_path) is not None):
print("读取成功")
print(len(read_images(folder_path)))
for _image in read_images(folder_path):
contours, img = reprocess_image(_image)
highest_point = find_highest_y_point(contours, img)
real_highest_y = img.shape[0] - highest_point[1]
real_highest_y *= 0.25
# print("最高点坐标:", highest_point)
# print("最高点x坐标:", highest_point[0])
# print("最高点y坐标:", highest_point[1])
print(real_highest_y)
else:
print("读取失败")
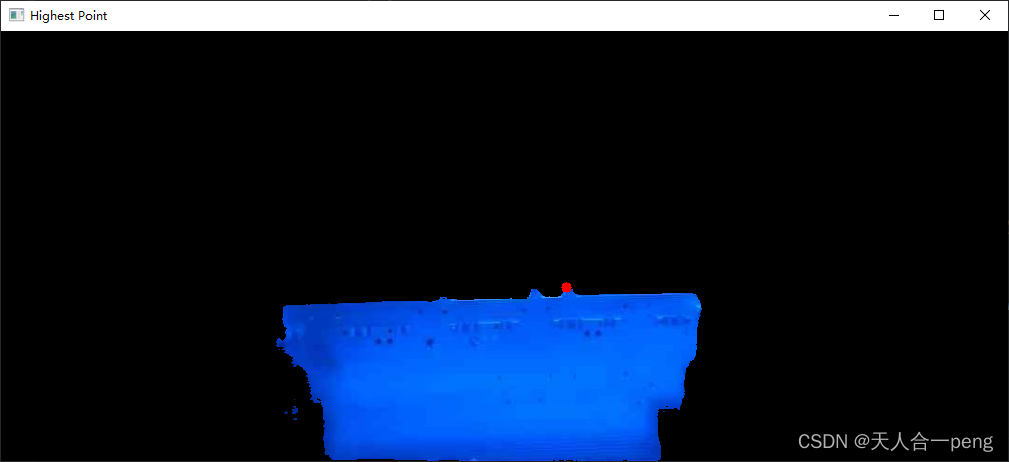
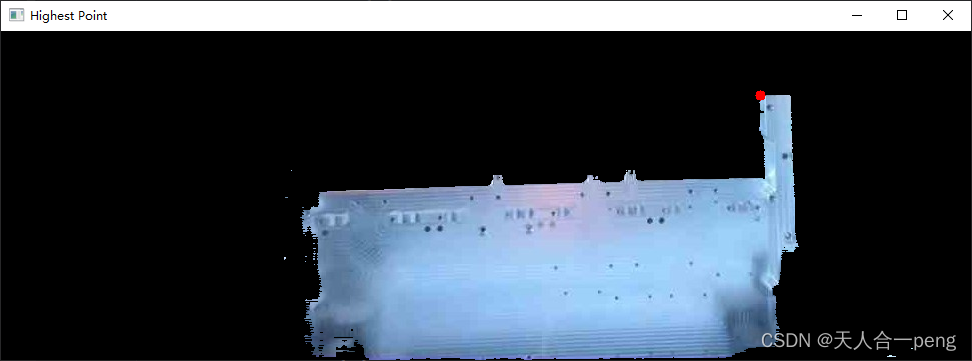
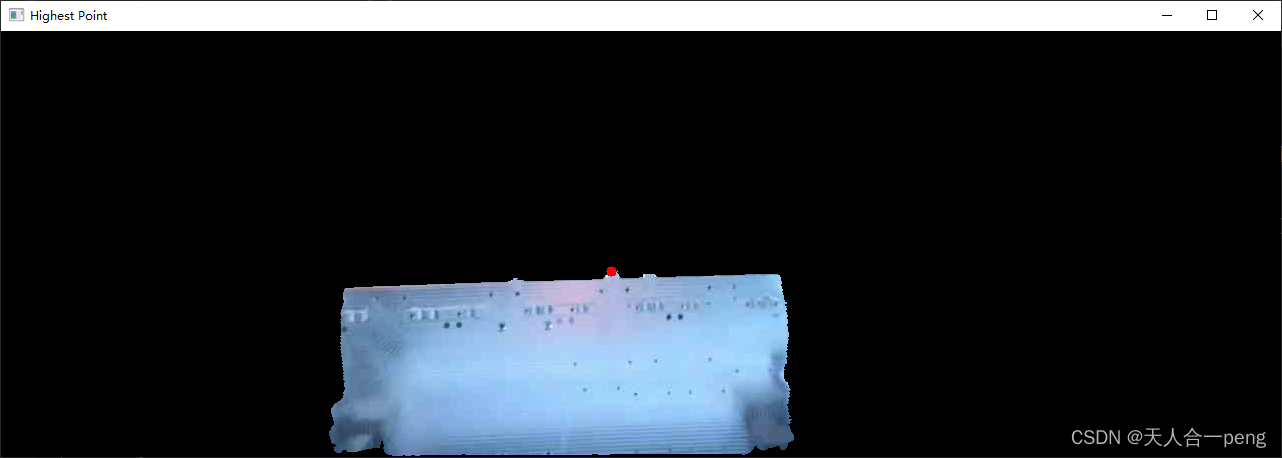
分割后的图像



结果