文章目录
- 环境
- 功能介绍
- 飞行视图
- 规划视图
- 飞机设置
- 分析工具
- 程序设置
- 连接飞机
- 飞机设置
- 分析工具
- 飞行视图
- 规划任务
- 总结
- 参考
环境
- QGroundControl V4.2.0
- PX4-Autopilot V1.3.0dev
- Gazebo 模拟无人机
功能介绍
- 飞行视图
- 规划视图
- 飞机设置
- 分析工具
- 程序设置
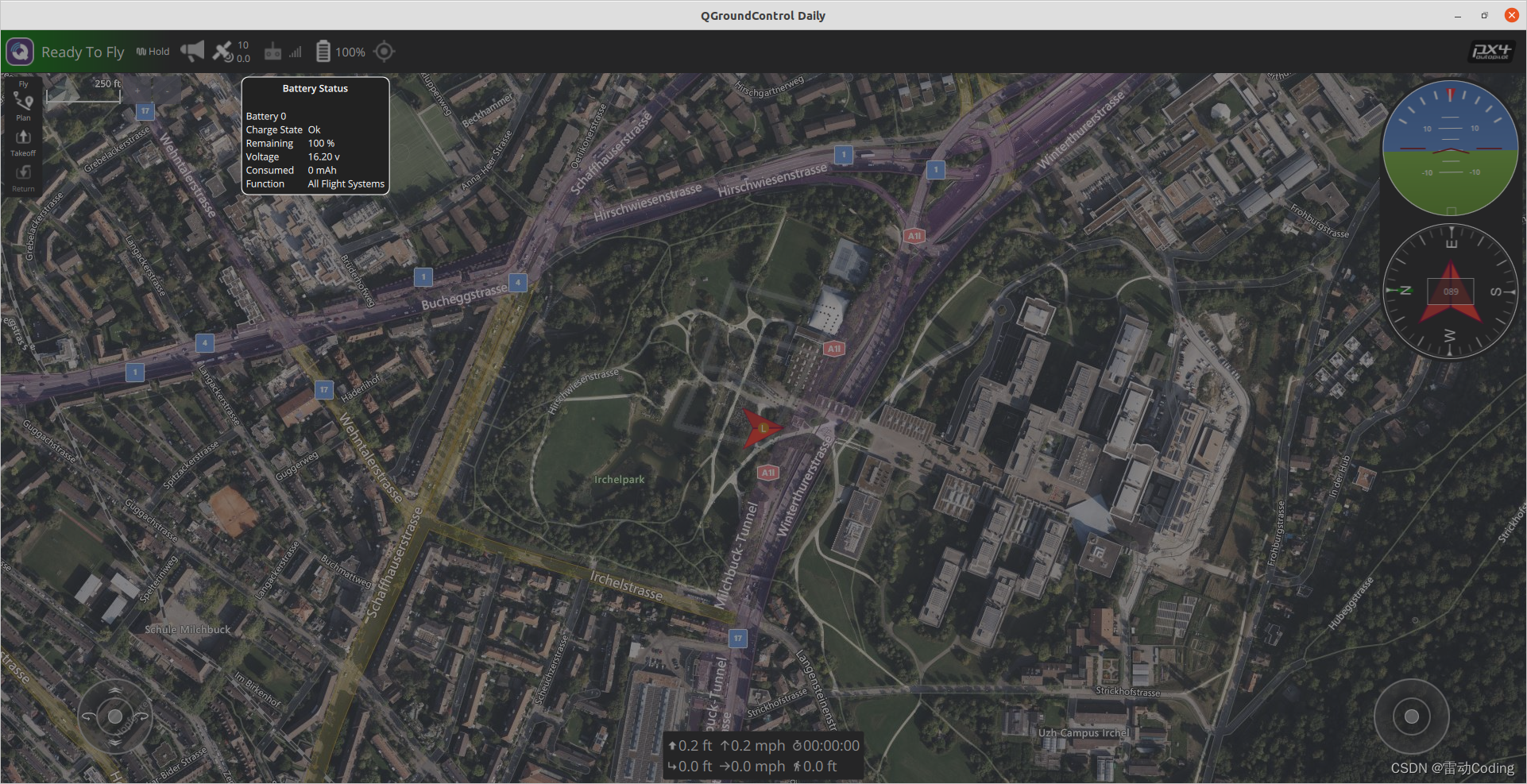
飞行视图

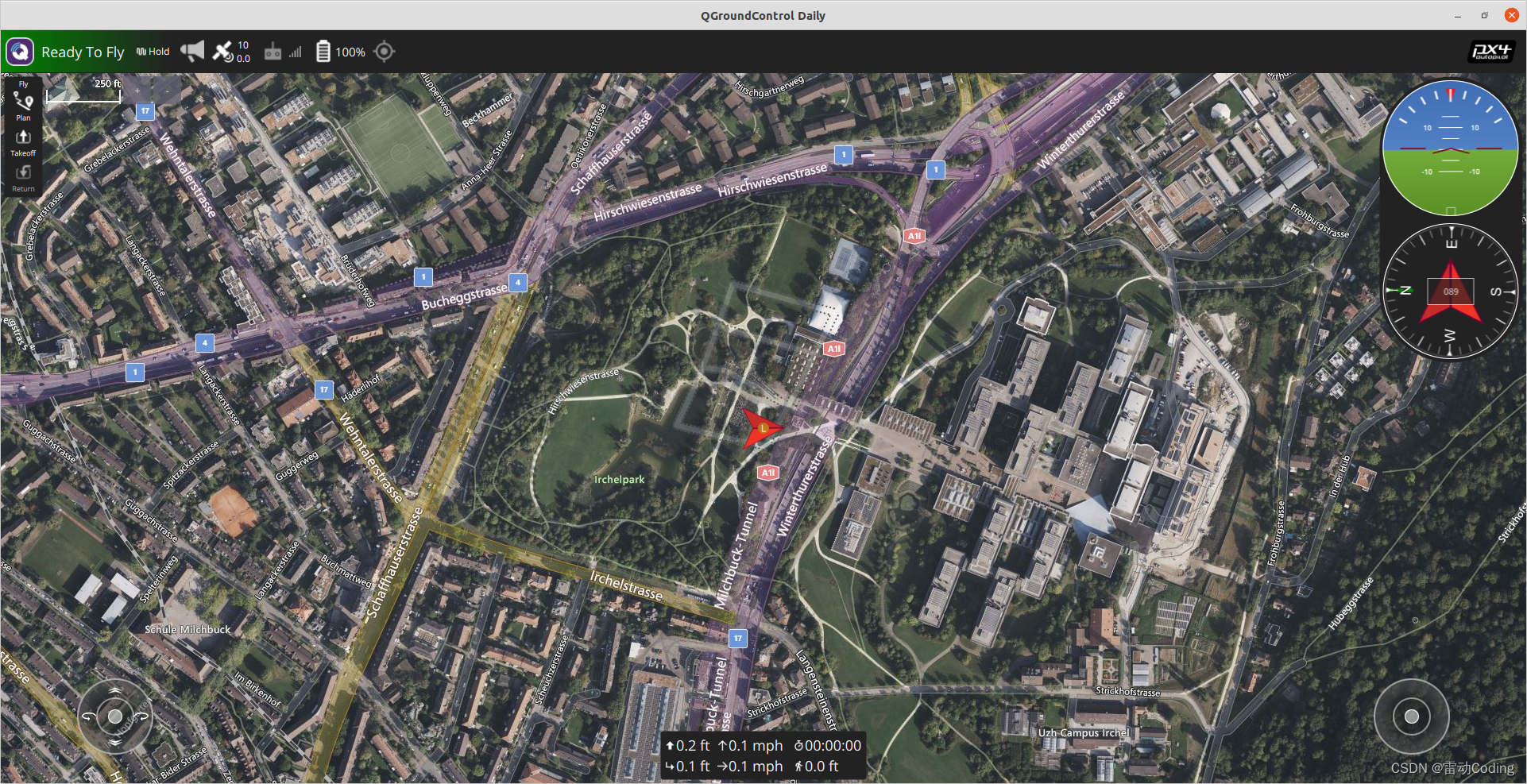
- 软件打开后为飞行视图,可在地图上显示飞机信息,发布起飞和返航命令
- 顶部为工具栏,显示飞机连接状态
- 左侧为工具条,可以发布起飞、返航命令
- 左下和右下为两个虚拟摇杆
- 右上为水平仪和罗盘
- 底图为地图
- 下部为飞行数据显示,可以添加或删除飞行数据显示项目
规划视图
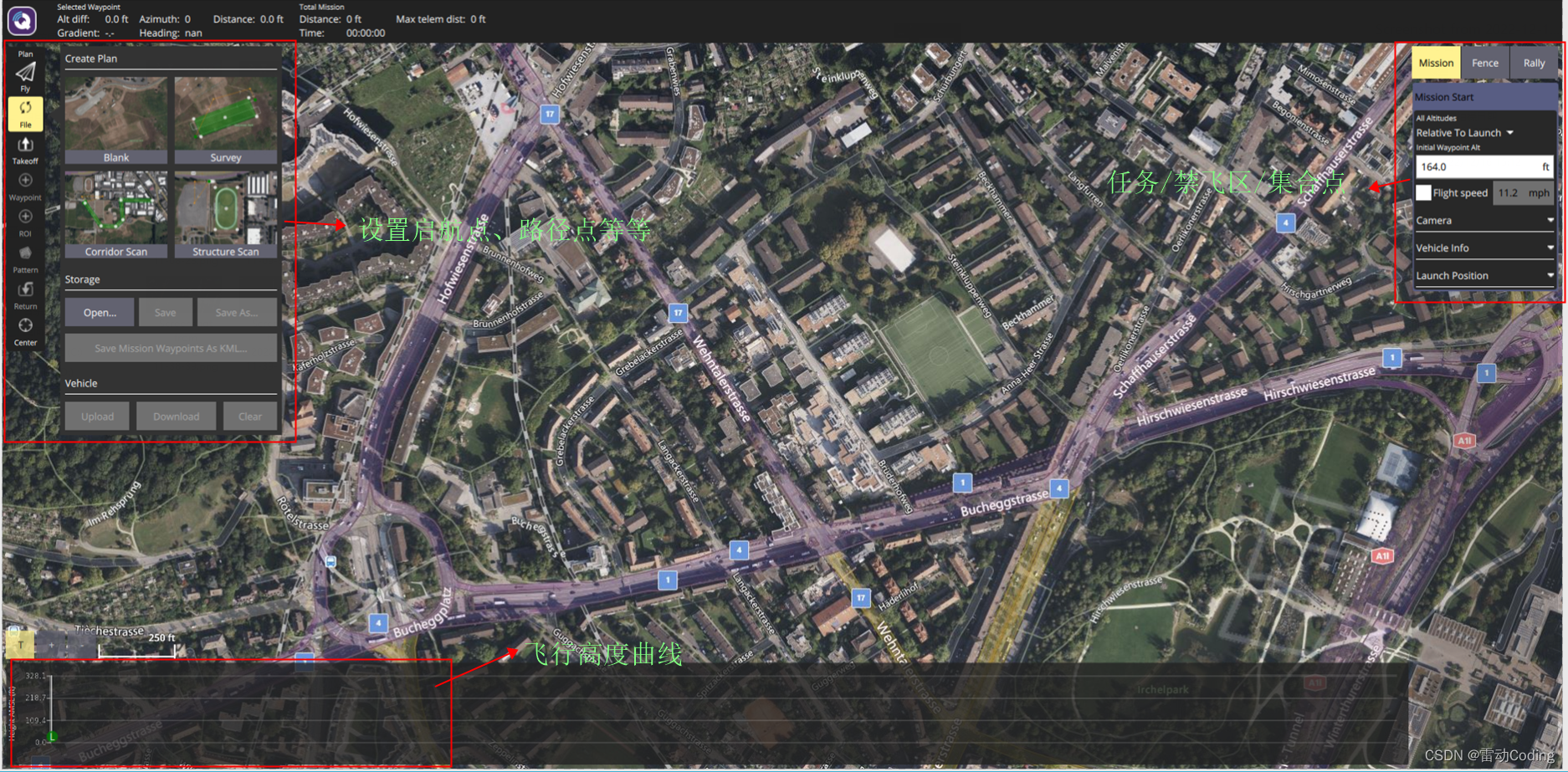
- 在飞行视图的工具条,可切换为规划(任务)视图
- 规划视图可以创建不同类型的任务,设置起飞点、路径点、返航点、兴趣区域等等
- 左上角按钮点击显示工具显示框
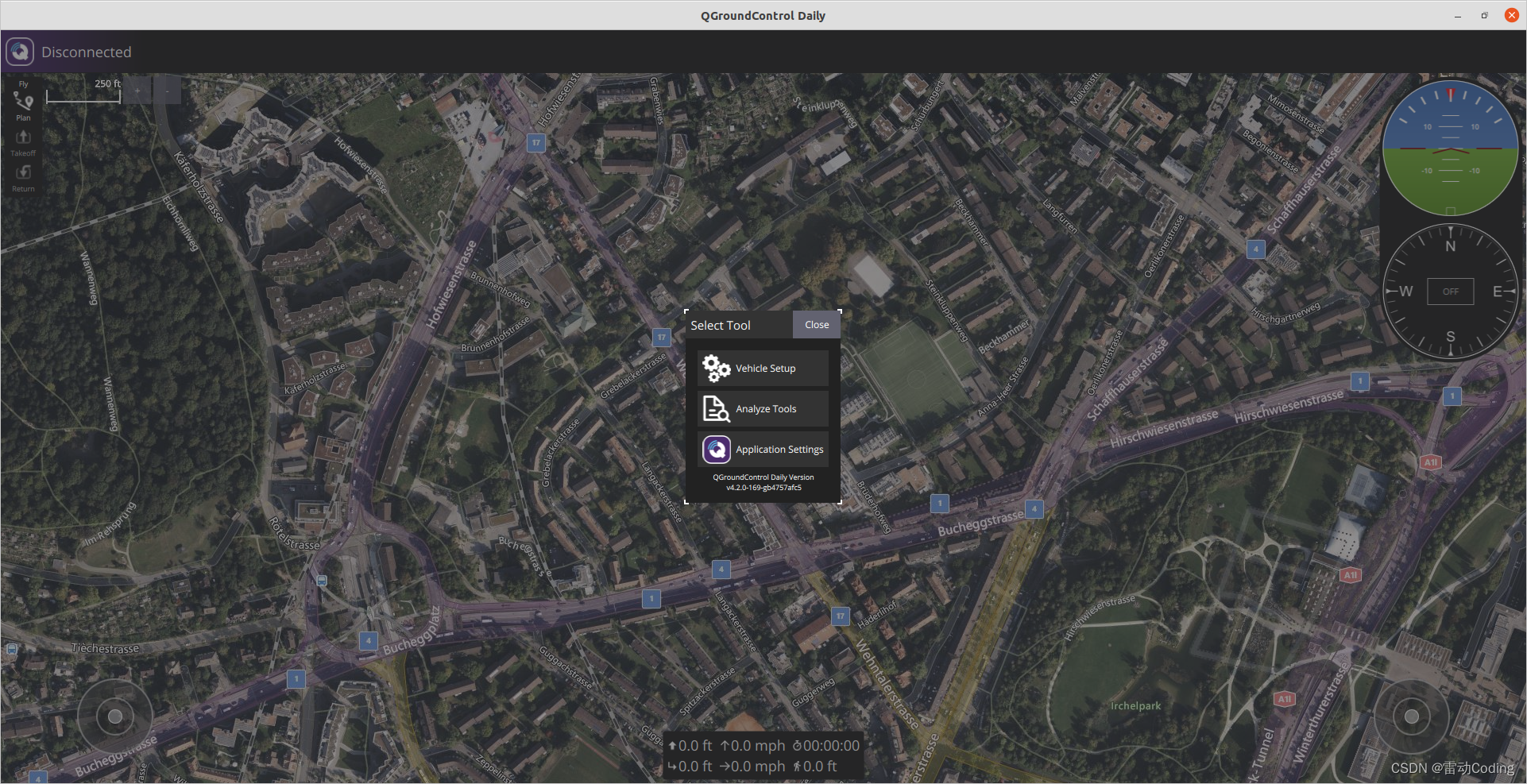
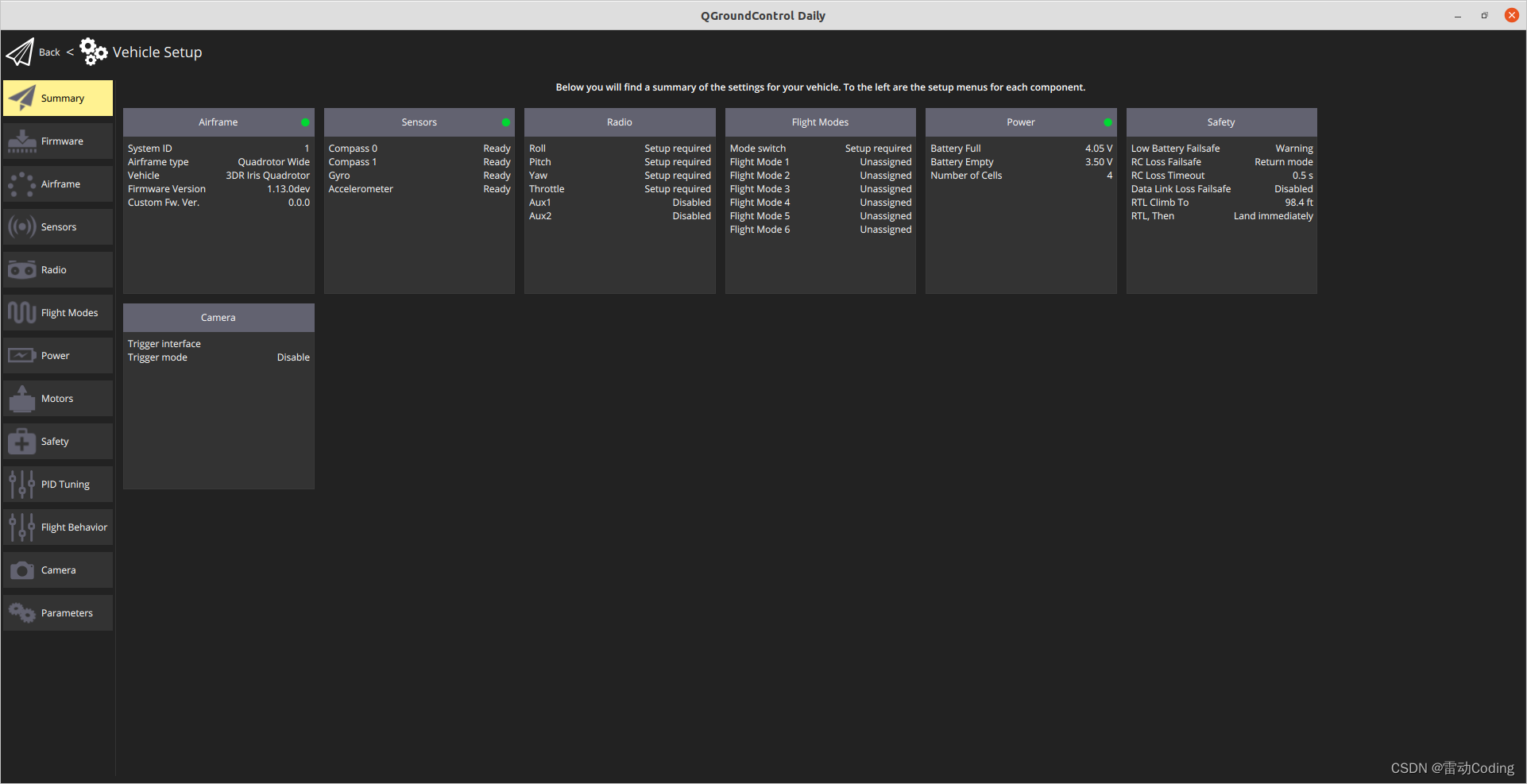
飞机设置
- 上图未连接飞机
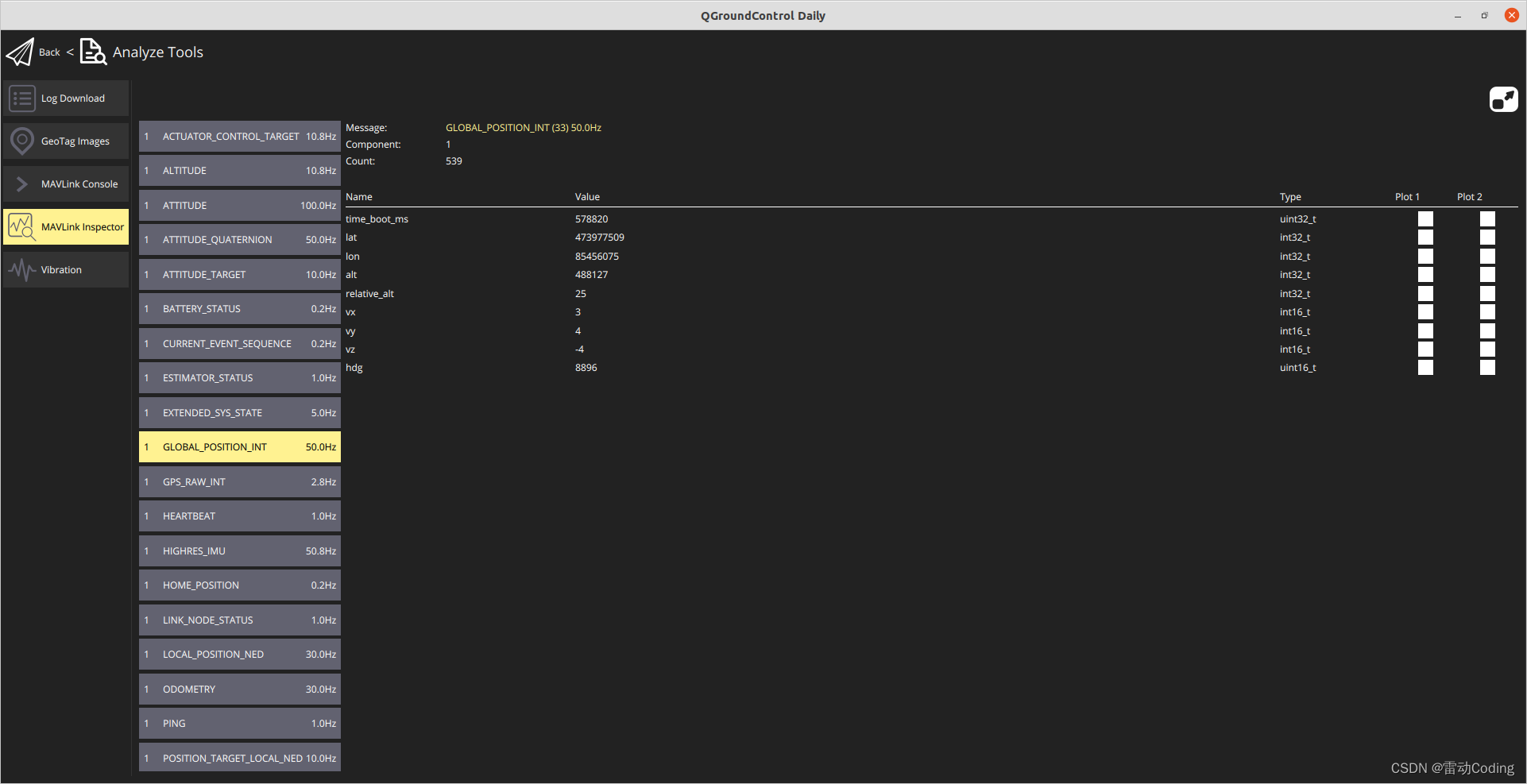
分析工具
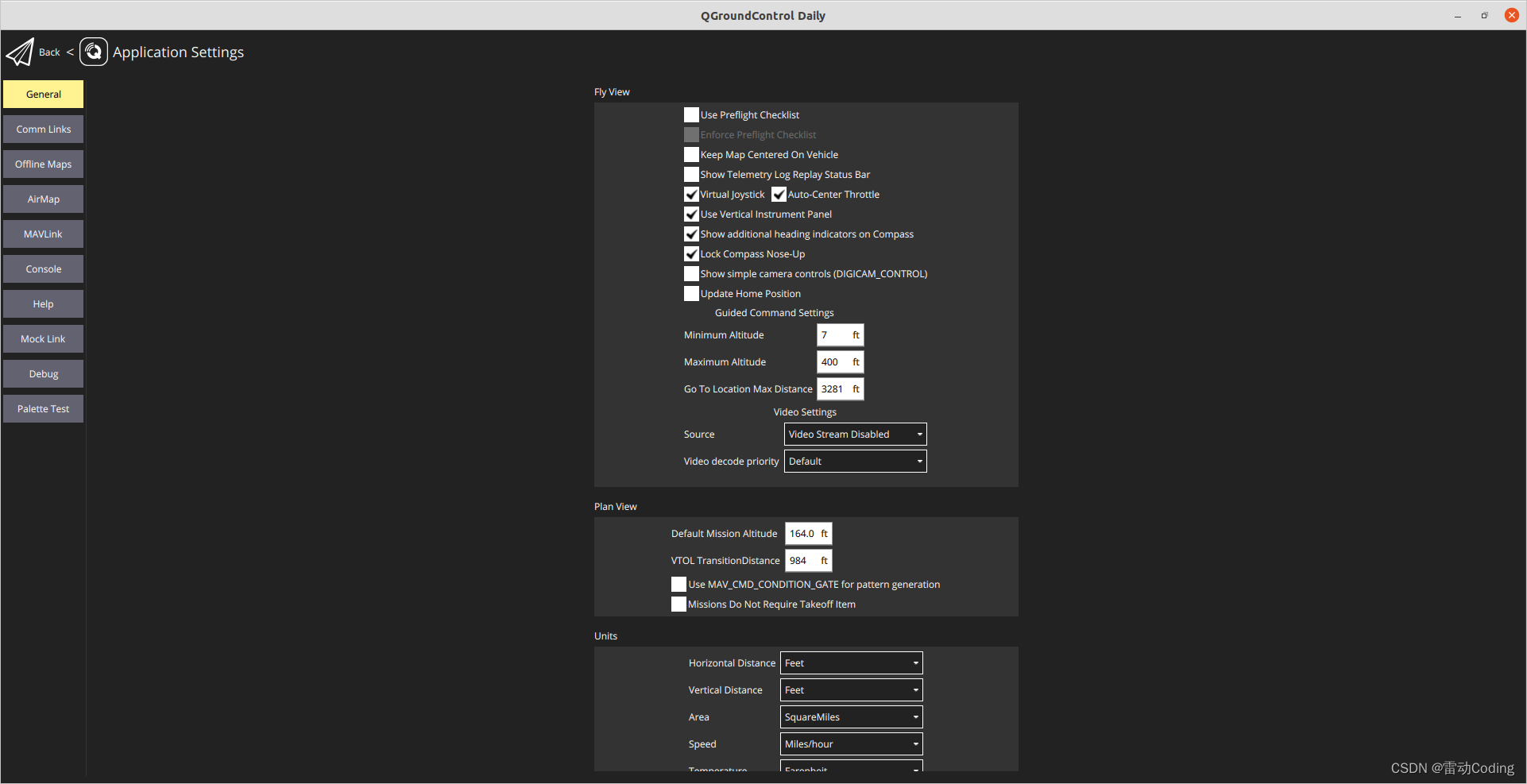
程序设置
连接飞机
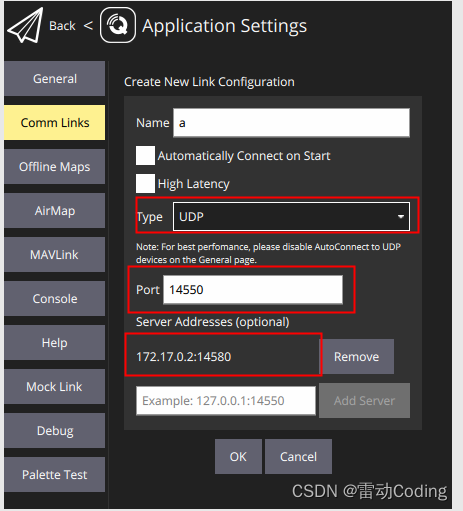
- 程序设置–>通信设置页面设置通信信息
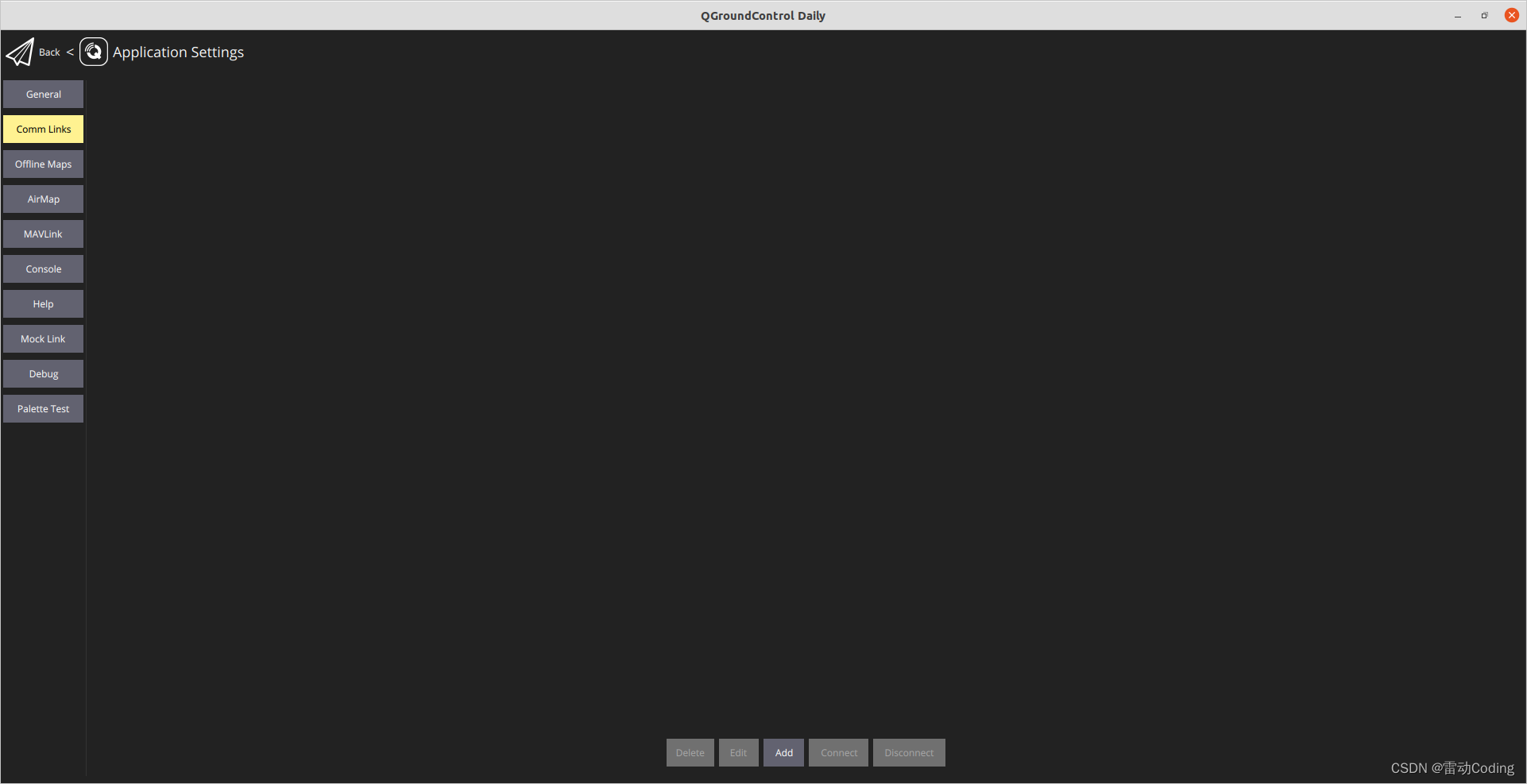
- 新建一个连接,可以选择串口、蓝牙、TCP、UDP、日志回放、Mock(模拟连接,调试用)
- 这里选择使用UDP,设置端口和飞机ip端口
- 选择上一步新建的连接,点击’Connect’按钮
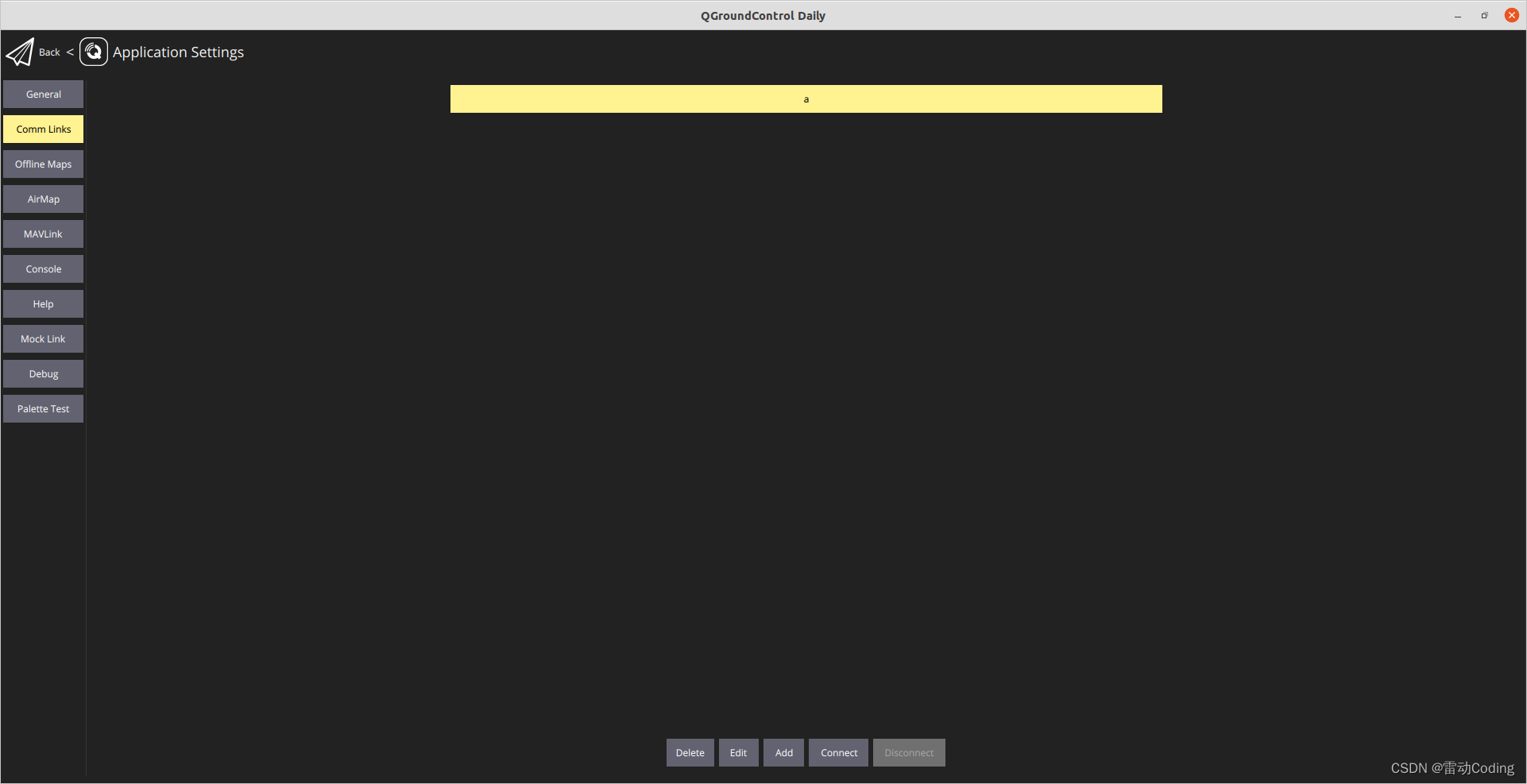
- 连接成功后,可以看到工具栏状态
- 工具栏可以显示飞机状态、电池状态等信息
飞机设置
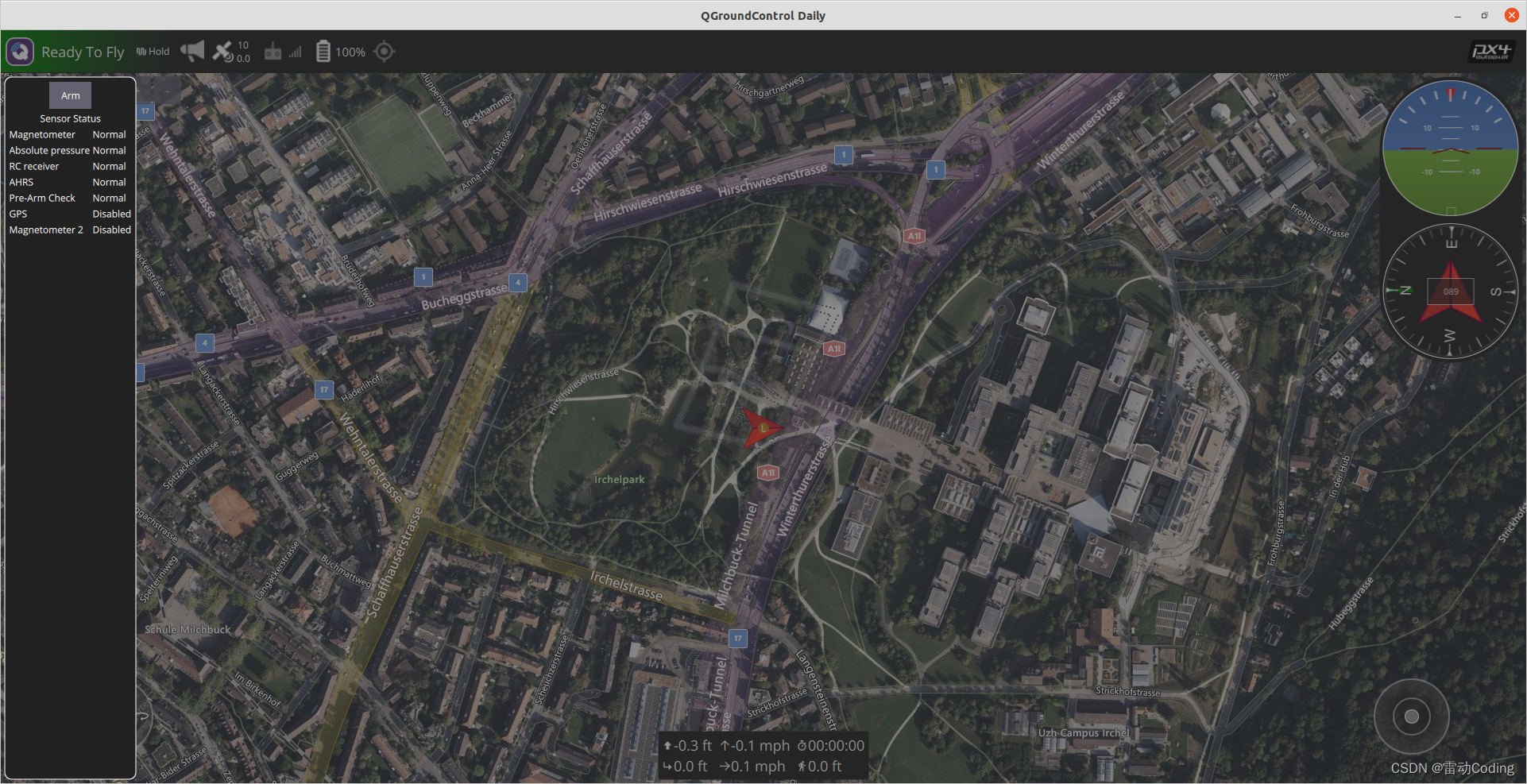
- 连接到飞机之后,显示飞机信息
分析工具
- 连接飞机之后,可以看到飞行数据了
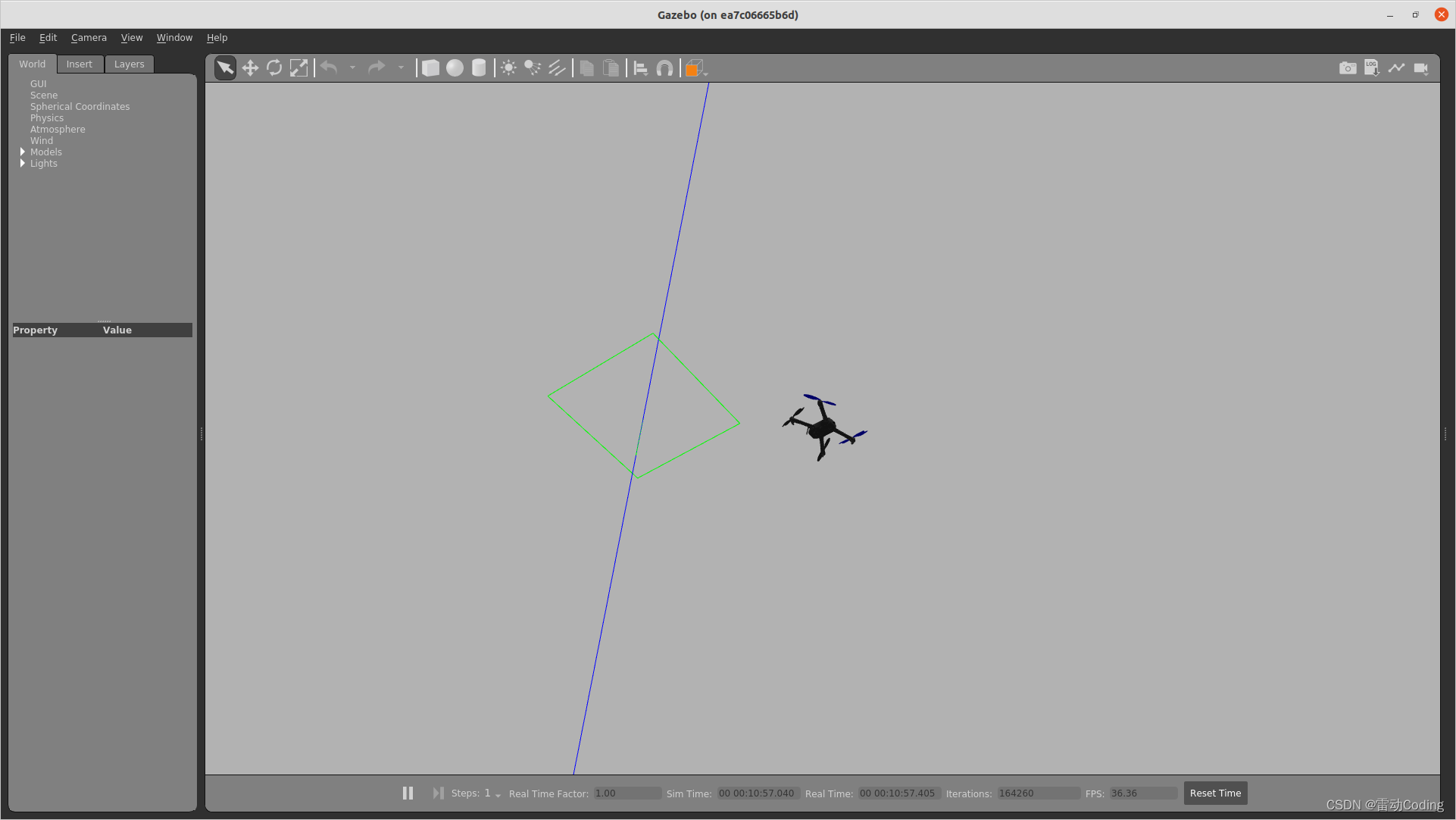
飞行视图
- 在工具条可以发送起飞命令
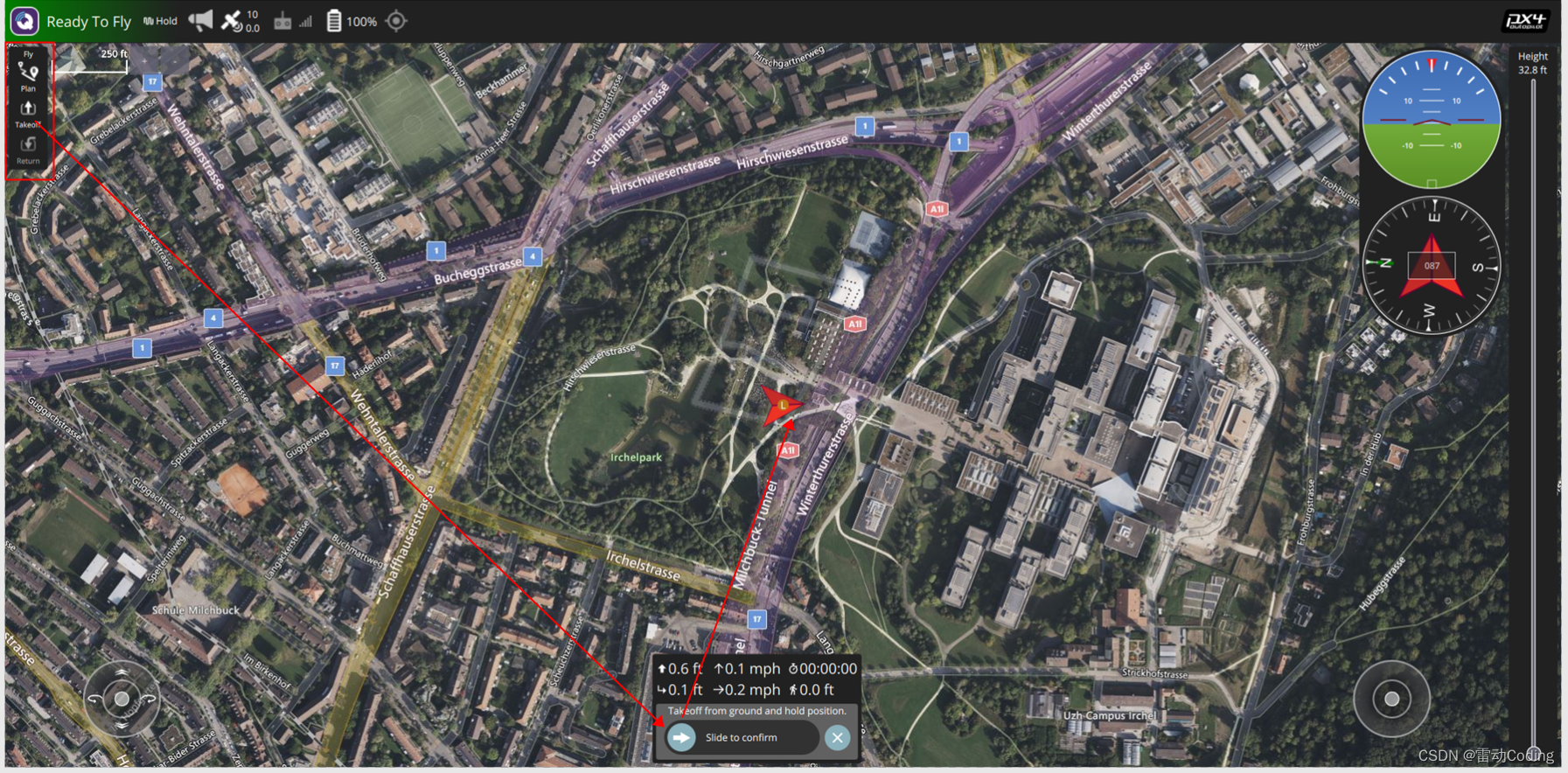
- gazebo中可以看到无人机起飞了
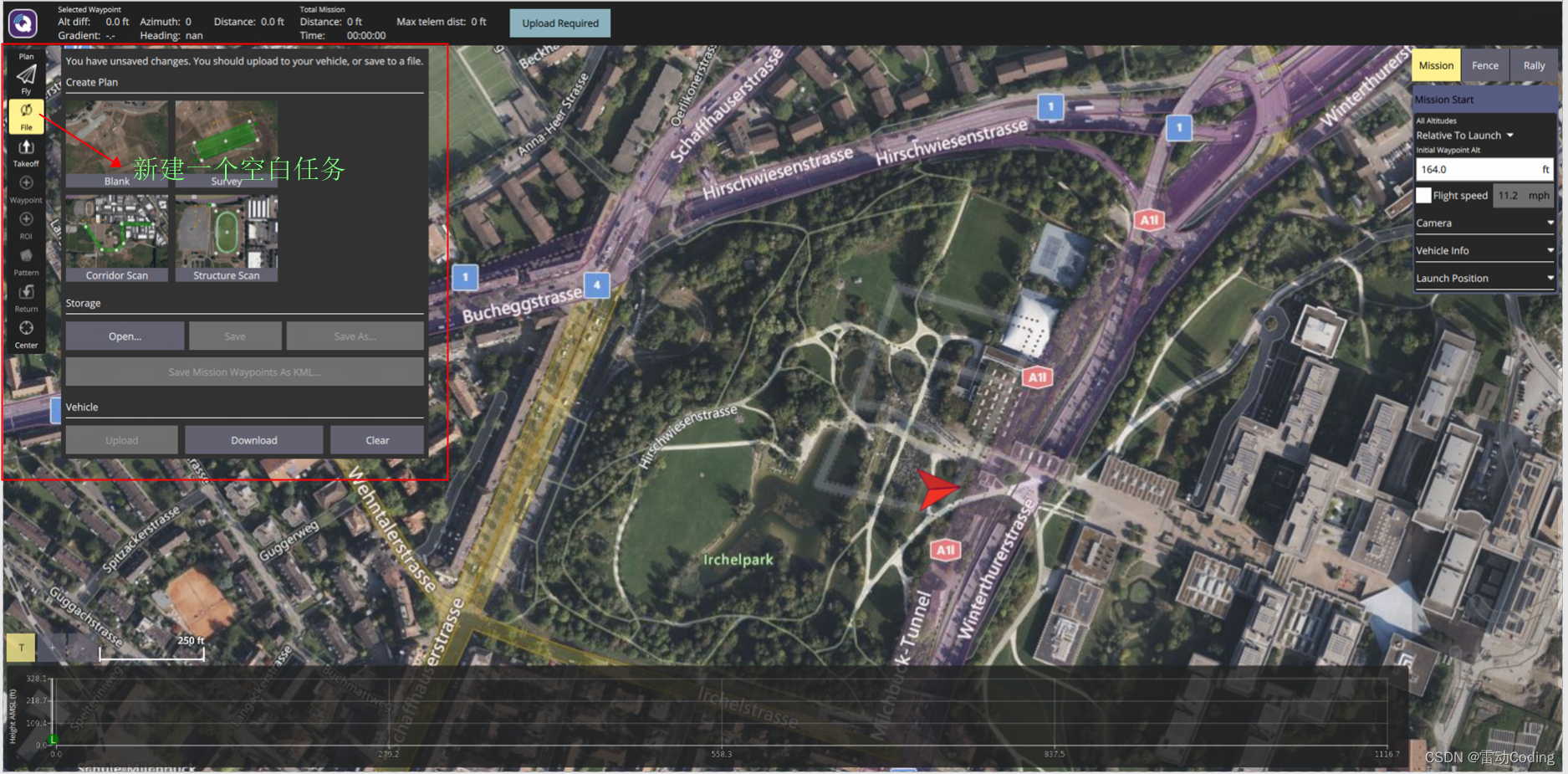
规划任务
- 切换到规划任务,新建一个简单空白任务,设置起飞点,路径点和返航点。
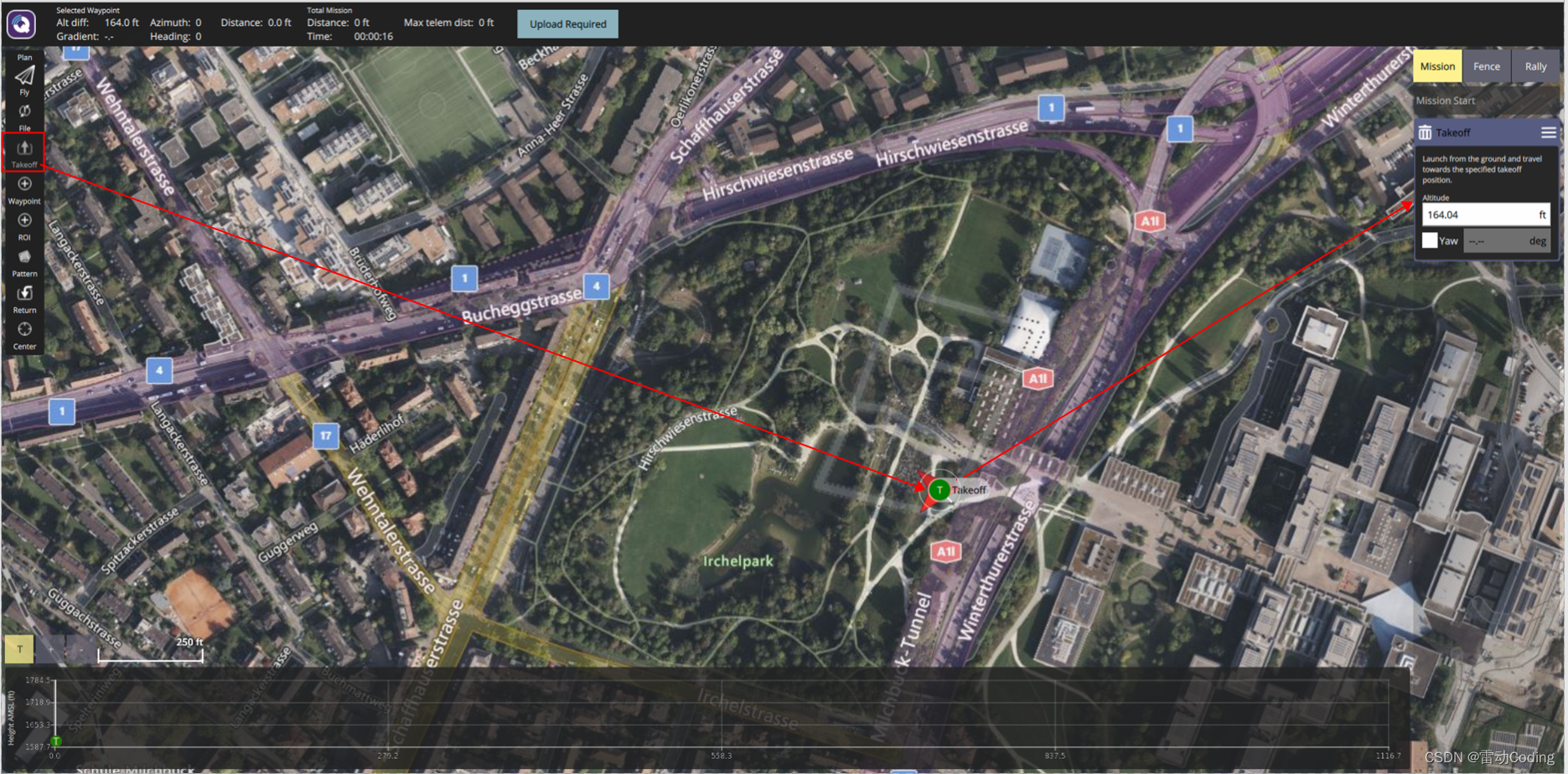
- 设置起飞点、高度等信息
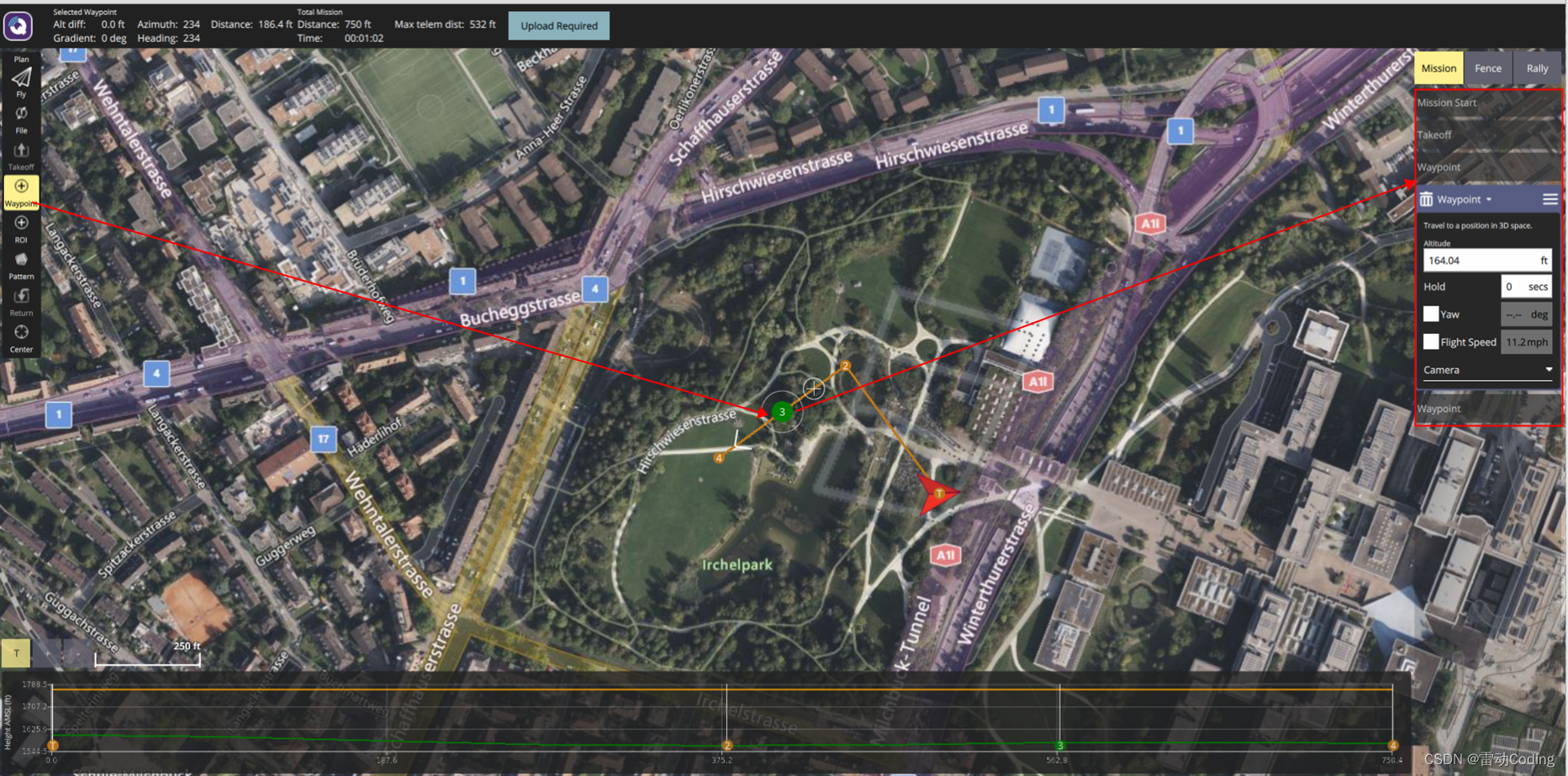
- 添加路径点
- 设置返航点
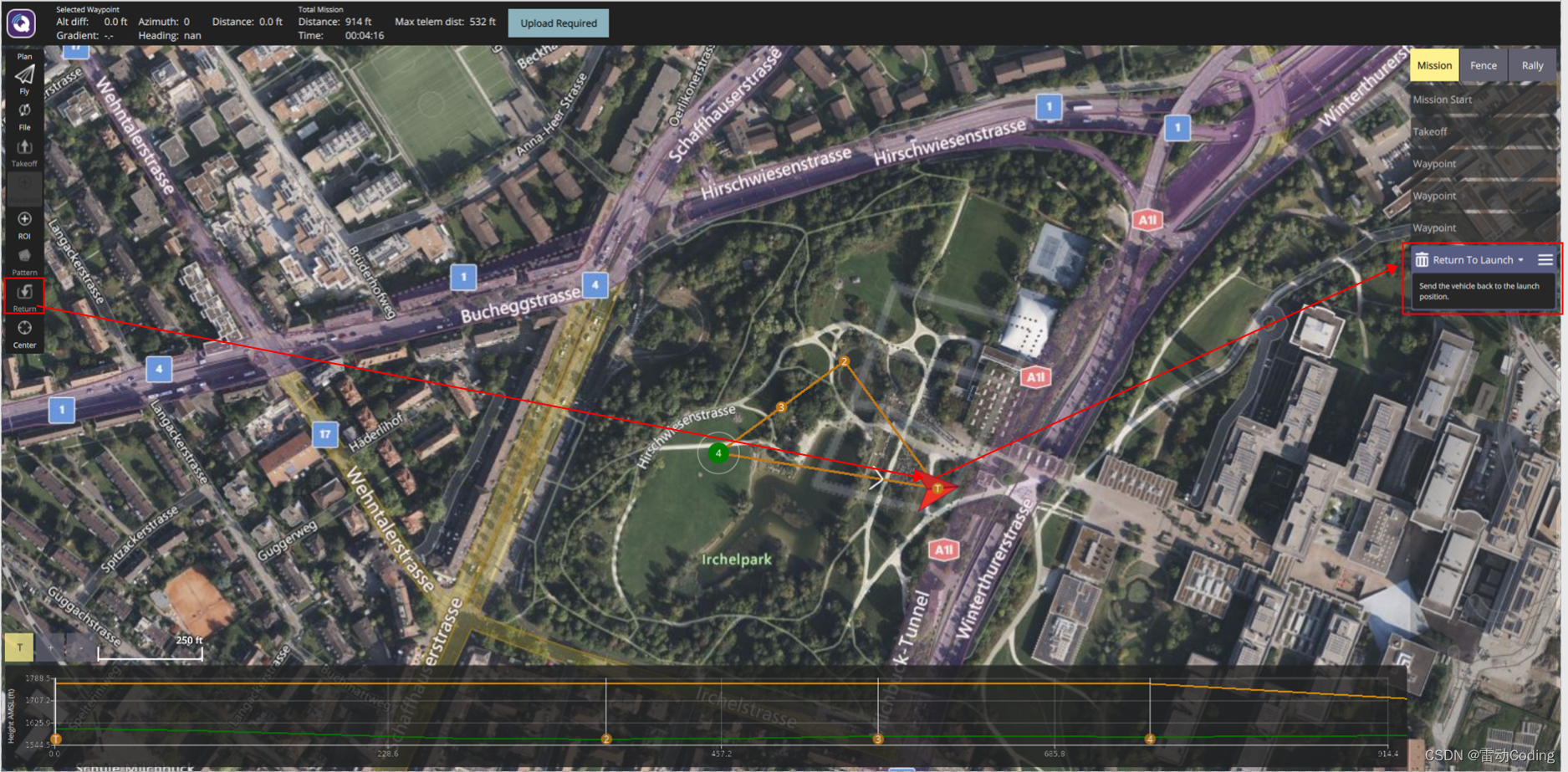
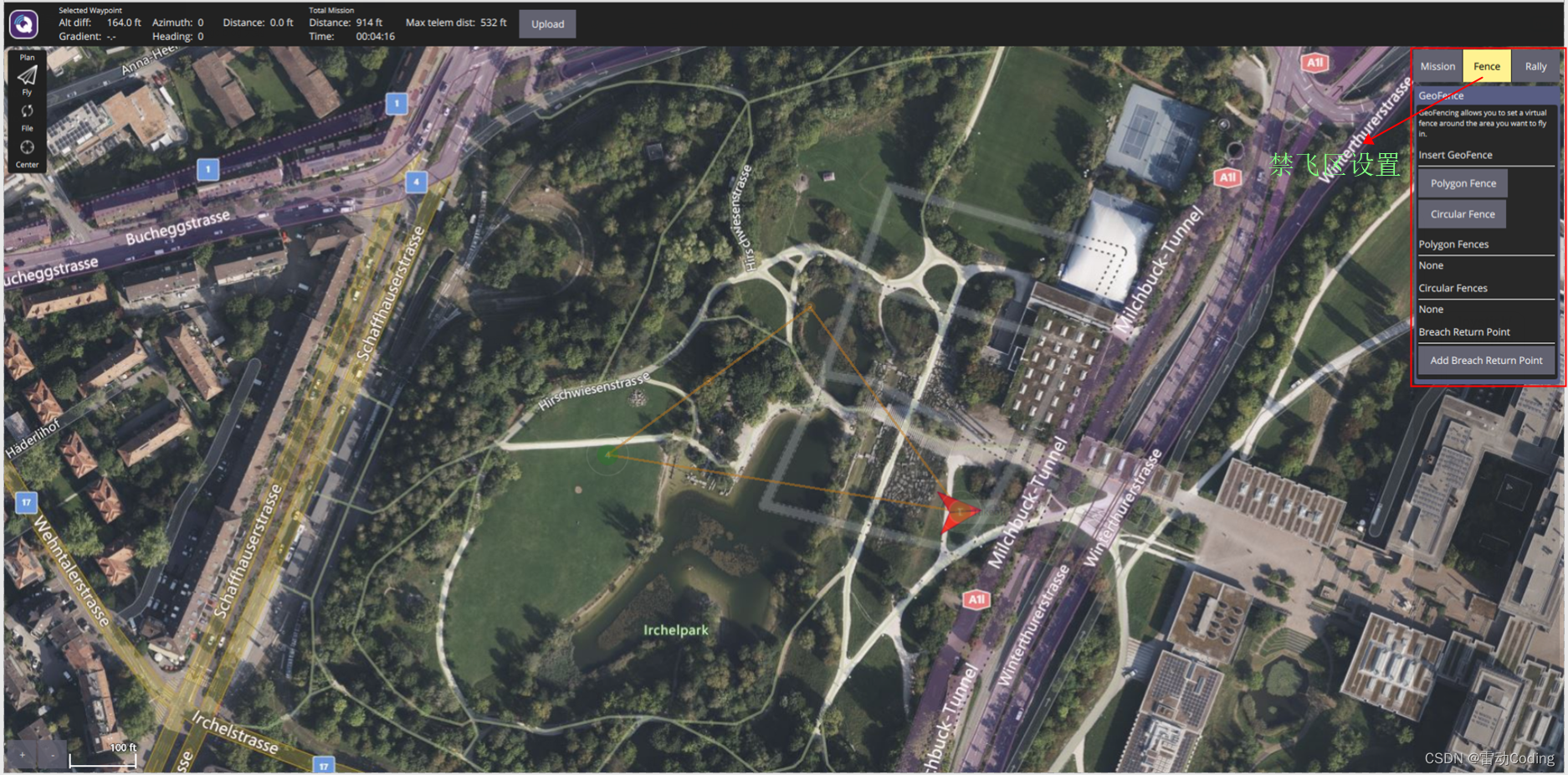
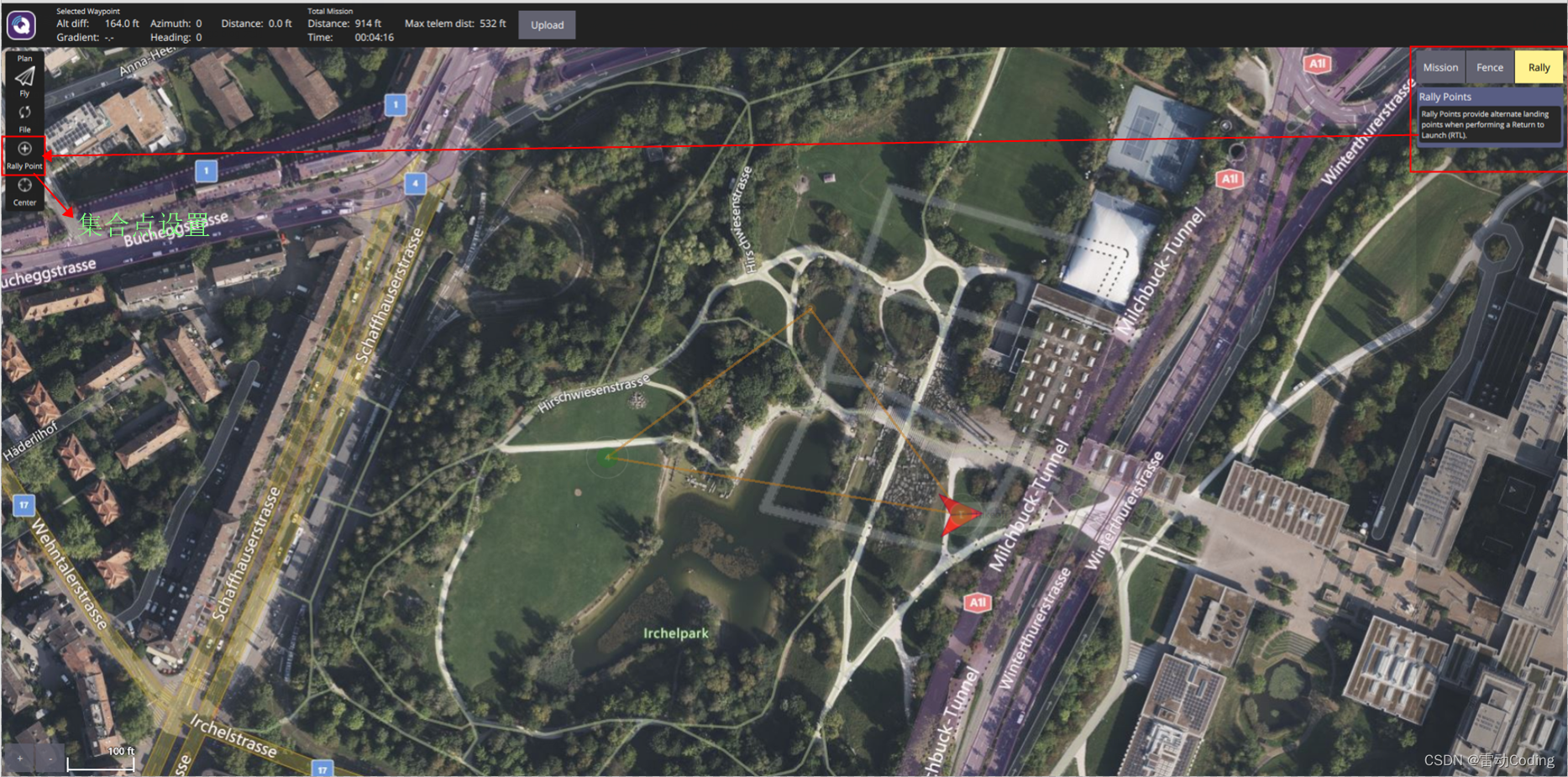
- 还可以设置禁飞区和集合点
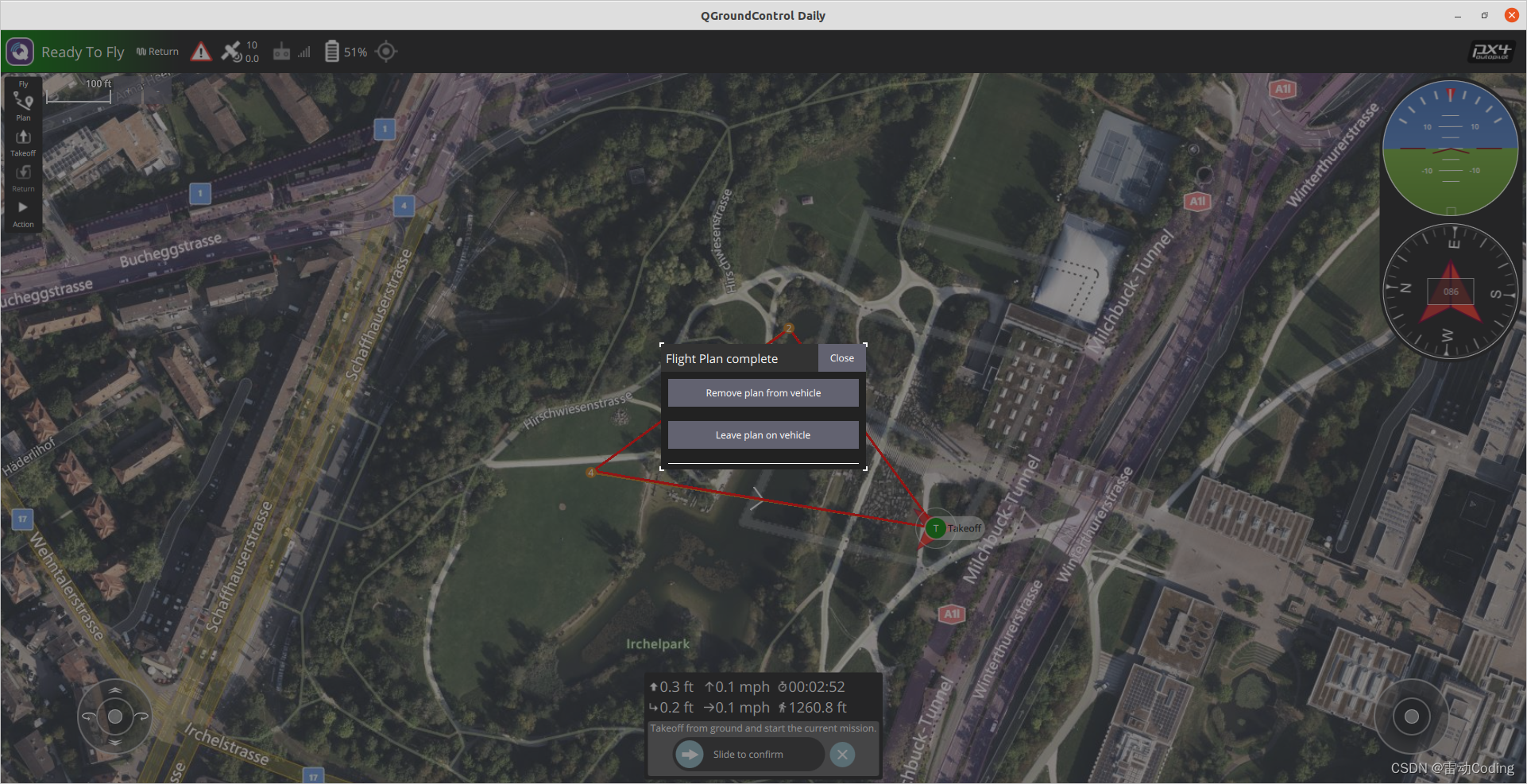
- 在工具栏上传任务信息后,飞行视图工具条,点击起飞按钮可以执行任务
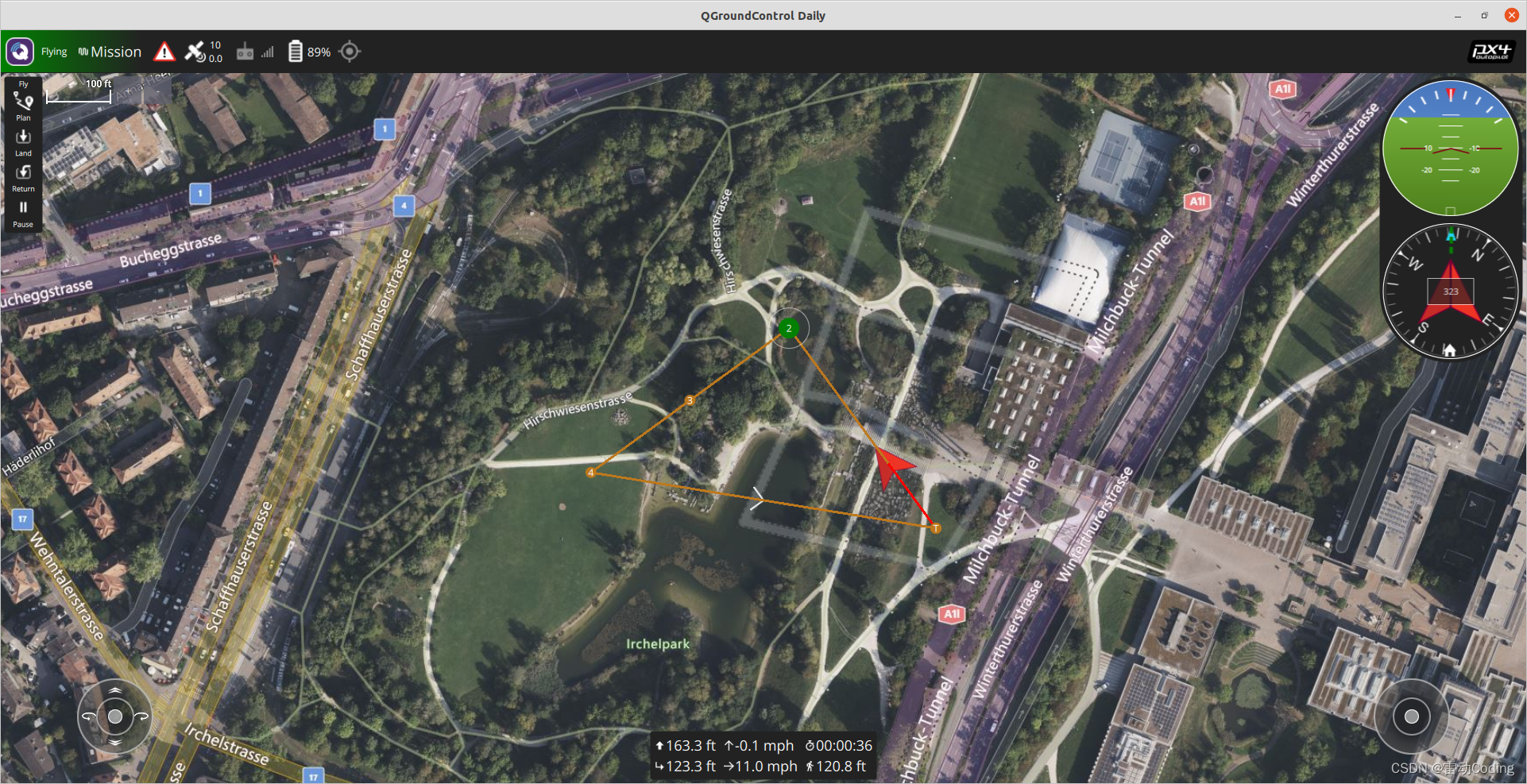
- 任务执行完毕后,会提示是否移除任务或保留任务
总结
- 以上是简单使用过程,下一章是SITL(软件模拟无人机)和mock模拟无人机流程
参考
- QGC使用手册
- 开发教程