欢迎入群共同学习交流
时间记录:2024/5/23
一、模块介绍
(1)引脚介绍
VCC:电源引脚,接单片机3.3/5V
GND:电源地
Trig:超声信号触发引脚
Echo:超声信号接收引脚
(2)时序图
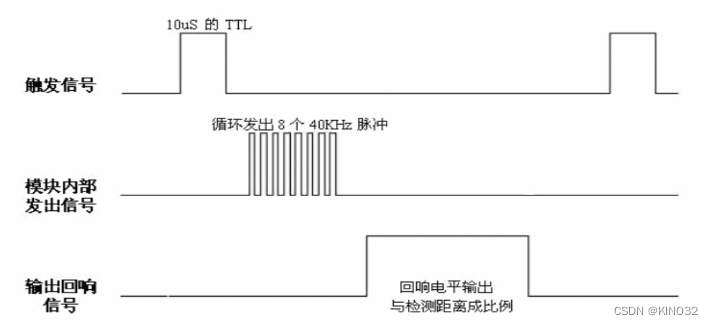
介绍:通过Trig触发引脚设置一个大于10us的TTL高电平,触发内部循环发送8个40KHZ的超声波,然后通过接收引脚判断接收信号高电平的持续时间,通过声速进行计算来回的距离,如果超过38ms仍未接收到回波也会触发高电平,此时电平持续时间最长
二、示例代码
(1)头文件
#ifndef __HCSR04_H__
#define __HCSR04_H__
#include "stm32f10x.h"
/**HC-SR04超声模块初始化*/
void Hcsr04_Init(void);
/**获取距离,单位CM*/
void vGetDistance(float *dis,float temp);
#endif
(2)源文件
#include "hc_sr04.h"
#include "delay.h"
//端口宏定义
#define Tring_GPIO GPIOB
#define Tring_PIN GPIO_Pin_5
#define Echo_GPIO GPIOB
#define Echo_PIN GPIO_Pin_6
void Hcsr04_Init(void)
{
//使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
/**初始化GPIO端口*/
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = Tring_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Tring_GPIO,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = Echo_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Echo_GPIO,&GPIO_InitStruct);
/**初始化TIM2,进行计时*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_Period=0xFFFF;
TIM_TimeBaseInitStruct.TIM_Prescaler=72-1; //1us计数一次
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
TIM_Cmd(TIM2,ENABLE);//使能/开启定时器
}
void vGetDistance(float *dis,float temp)
{
u16 time = 0;
/**Tring引脚拉高10us的TTL电平,使模块发送超声波*/
GPIO_SetBits(Tring_GPIO,Tring_PIN);
vDelayUs(10);
GPIO_ResetBits(Tring_GPIO,Tring_PIN);
/*获取回波时间,高电平持续时间38ms为无回波时返回时间*/
while(GPIO_ReadInputDataBit(Echo_GPIO,Echo_PIN) == 0);
TIM_SetCounter(TIM2,0);
while(GPIO_ReadInputDataBit(Echo_GPIO,Echo_PIN) == 1);
time = TIM_GetCounter(TIM2);
//计算距离
*dis = time*(334.1+0.6*temp) / 20000;
vDelayMs(5); //等待下一次开始,官方建议60ms采样周期,自己根据情况修改
}








![【Linux】-Linux文件的上传和下载、压缩和解压[9]](https://img-blog.csdnimg.cn/direct/03c78febd2cb4a85ad6be37bba1944ce.png)