目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
5.完整工程文件
1.课题概述
基于EKF扩展卡尔曼滤波的一阶环形倒立摆控制系统simulink建模与仿真。基于扩展卡尔曼滤波(Extended Kalman Filter, EKF)的一阶环形倒立摆控制系统,是结合了现代控制理论与估计理论的经典应用案例,旨在提高对倒立摆系统状态的实时估计精度,从而实现更稳健的控制性能。
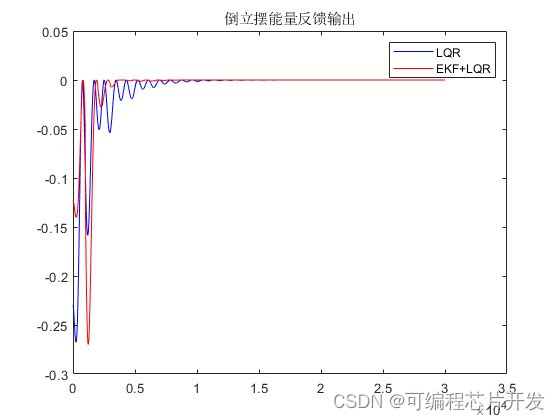
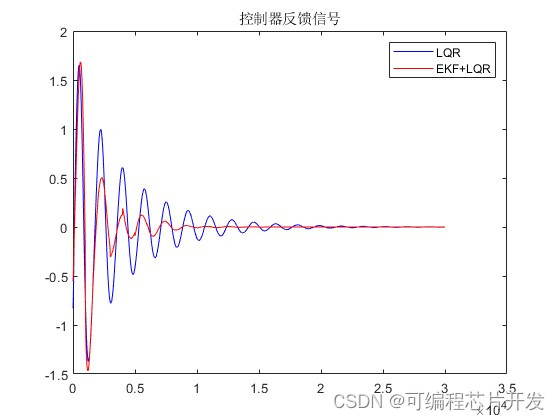
2.系统仿真结果

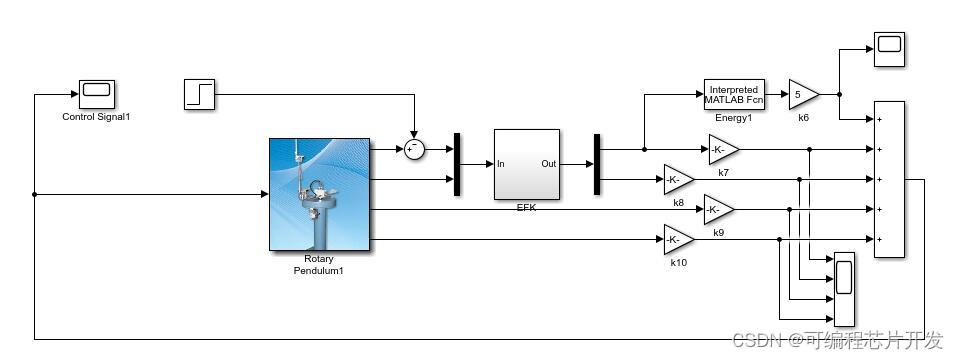
3.核心程序与模型
版本:MATLAB2022a
08_008m
4.系统原理简介
一级环形倒立摆的建模过程如下所示:

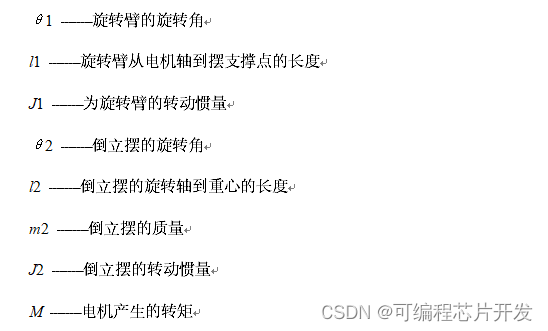
该次设计所研究的旋转倒立摆系统模型如图1所示,倒立摆模块由倒立摆的摆杆和一个支撑摆杆的旋转臂组成,摆杆固定在旋转臂一端,可以在垂直于转臂的方向上做360度的转动。旋臂的另一端安装在一个旋转伺服装置上,伺服装置通过电机驱动齿轮转动来实现旋臂在水平面内做360度的旋转。在摆杆的底端以及旋臂的里端均装有光电编码器,用来检测角度的变化并将信号传送给计算机。
整个一级倒立摆的控制对象建模过如下所示:


由于旋转倒立摆系统自身的特点,在没有控制或控制效果不佳的情况下很难稳定。对于倒立摆的控制有和两个变量,只是对于这两个变量的控制并不能使倒立摆达到平衡,因为除了位置信号以外还缺少了反映运动情况的信号,控制器必须在兼顾这些因素的情况下进行对倒立摆的控制。所以整个倒立摆系统需要对四个变量同时进行考虑。
基于EKF的一阶环形倒立摆控制系统综合了非线性动力学模型的实时估计和先进的控制策略,有效提升了系统的稳定性和控制精度。EKF通过连续的状态估计,提供了准确的系统状态信息,使得控制器能够做出及时且恰当的调整,以应对倒立摆系统的动态变化,从而确保了系统的平衡与控制目标的实现。这种集成方法不仅在理论研究中具有重要意义,也是众多工程实践中的关键技术,尤其是在机器人控制、航天器姿态控制等领域有着广泛的应用前景。
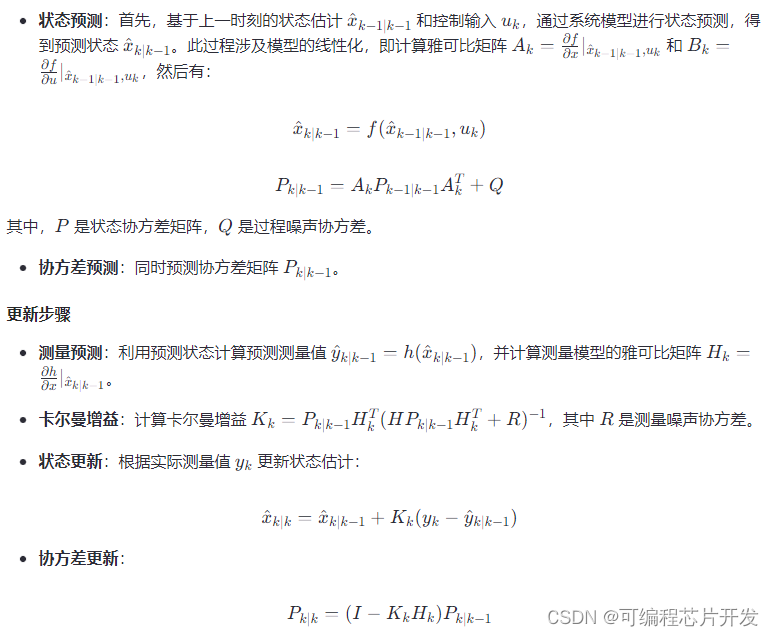
EKF是一种处理非线性系统状态估计的算法,它通过局部线性化非线性模型来应用卡尔曼滤波的基本原理。EKF包括预测(Prediction)和更新(Update)两个步骤。
5.完整工程文件
V