1.相关系统环境
系统版本:ubuntu 20.04
ROS版本:ROS1 - noetic
激光雷达型号:RoboSense Ruby
(更新于2024.5.14)
2.网口配置:
将PC/工控机的网口配置为:
ipv4,方式设置为手动
ip地址、掩码以及网关设置成下图

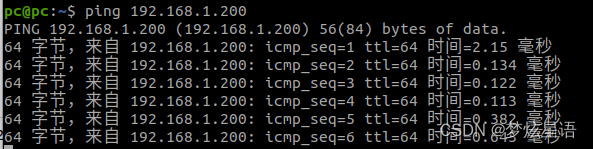
可以ping雷达的IP地址,我的是192.168.1.200
$ ping 192.168.1.200
出现以下信息就表示正常:
3.环境配置
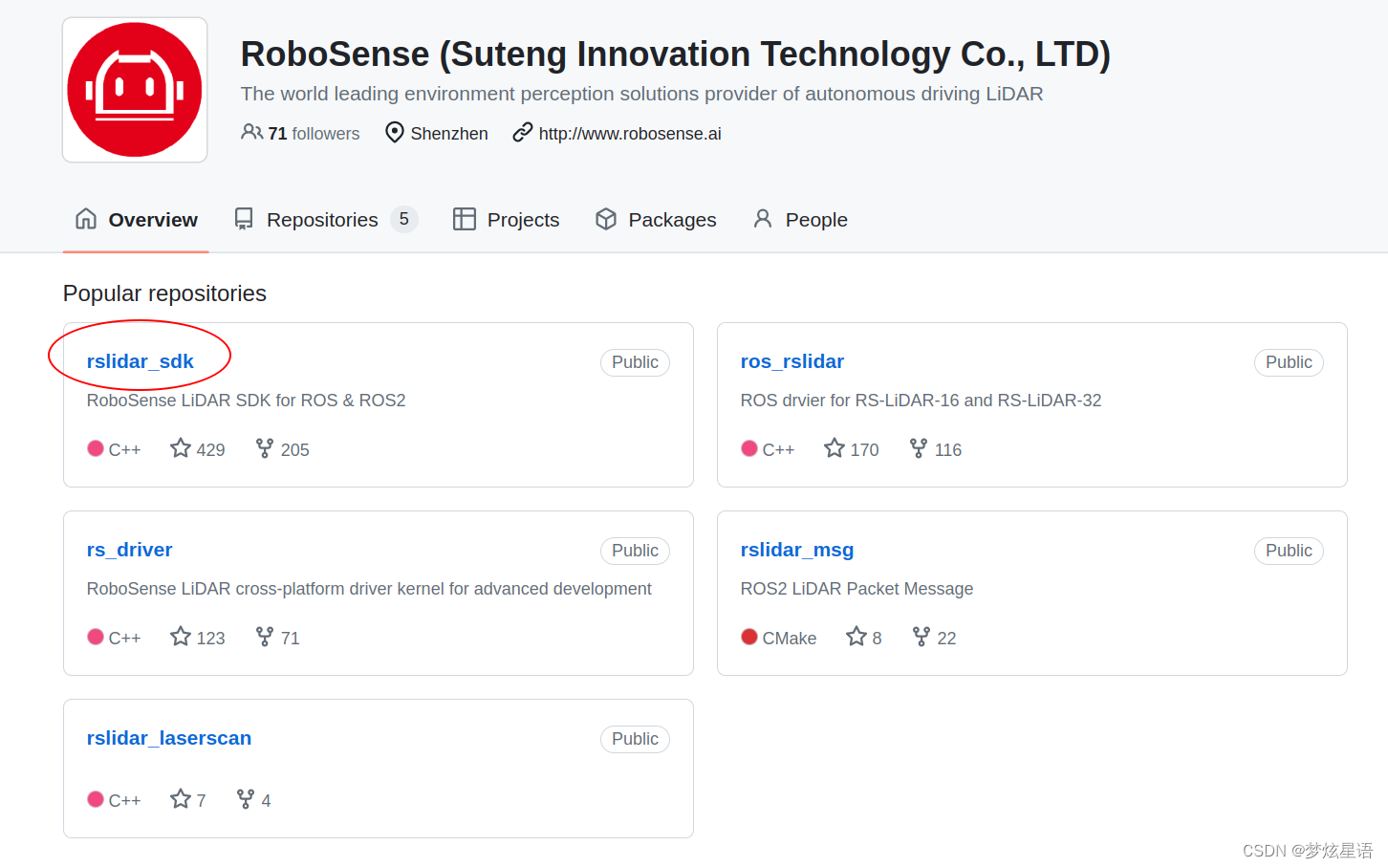
官方链接
3.1初始化
rslidar_sdk项目包含子模块驱动内核rs_driver,在执行git clone后,还需要执行相关指令,初始化并更新子模块
mkdir -p ~/rslidar_ws/src
cd ~/rslidar_ws/src
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update
3.2安装依赖:
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
sudo apt-get install -y libpcap-dev
3.3编译、运行(3种方式):
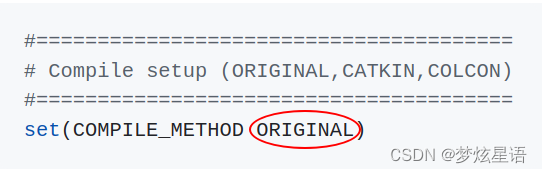
3.3.1 打开工程内的CMakeLists.txt文件,将文件顶部的变量COMPILE_METHOD改为ORIGINAL.
编译运行
cd rslidar_sdk
mkdir build && cd build
cmake .. && make -j4
./rslidar_sdk_node
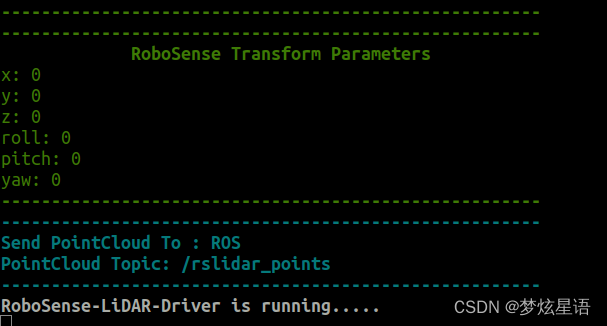
配置成功后的显示:
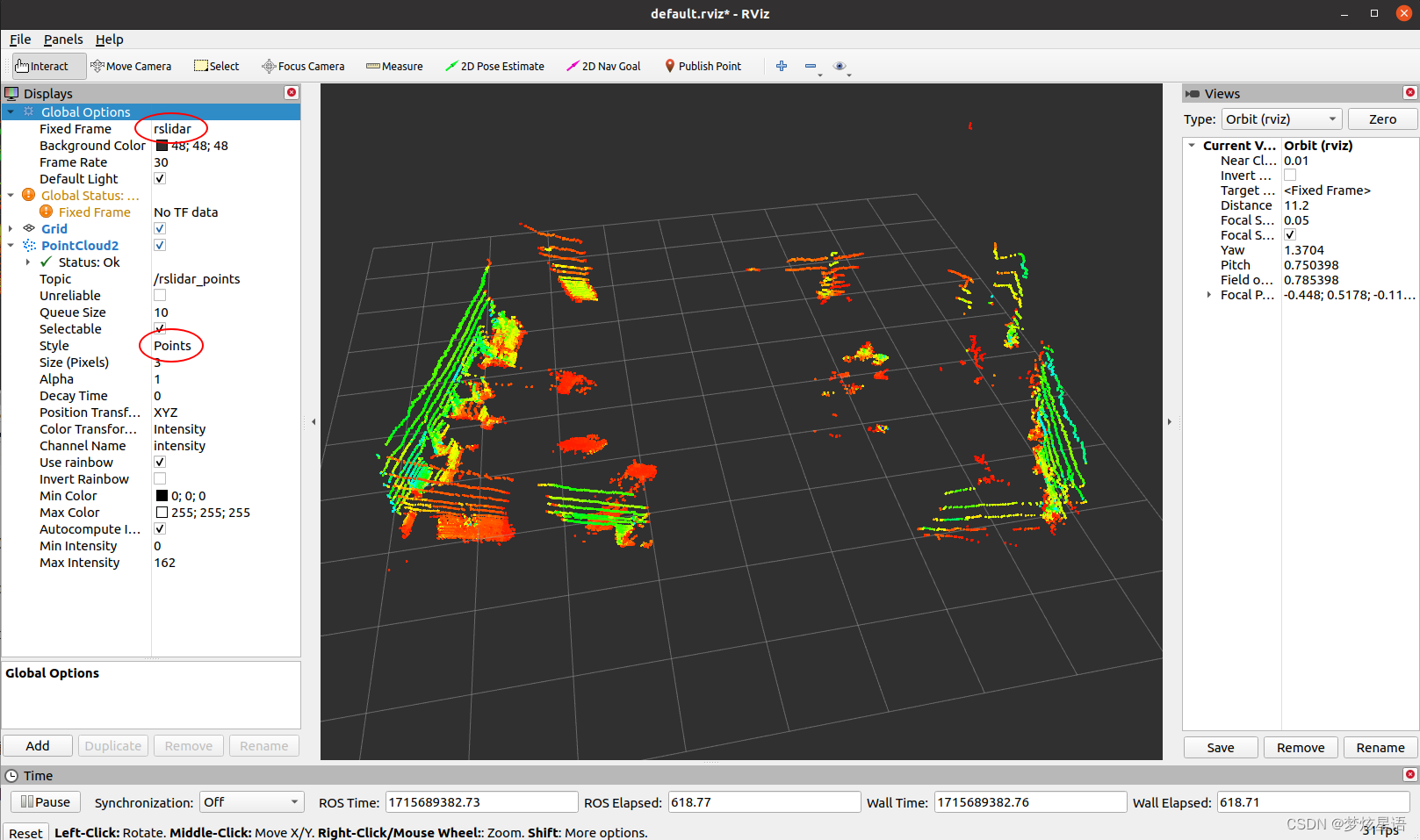
使用rviz可视化工具,查看点云数据,终端开启rviz:
把速腾雷达的点云话题,添加到可视化列表里,rslidar_points选择“PointCloud2”。接着在左侧的选项里,把"Fixed Frame"改成“rslidar”; 把“Style”改成“Points”。
3.3.2 依赖于ROS-catkin编译
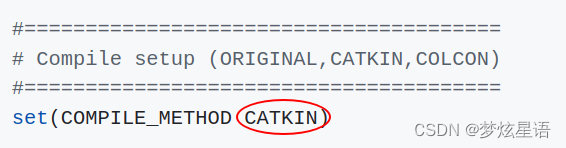
(1) 打开工程内的CMakeLists.txt文件,将文件顶部的变量COMPILE_METHOD改为CATKIN.
(2) 将rslidar_sdk工程目录下的package_ros1.xml文件复制到package.xml。
cp -i package_ros1.xml package.xml
(3) 新建一个文件夹作为工作空间,然后再新建一个名为src的文件夹, 将rslidar_sdk工程放入src文件夹内
(4) 返回工作空间目录,执行以下命令即可编译、运行。如果使用.zsh,将第二行替换成 source devel/setup.zsh
catkin_make
source devel/setup.bash
roslaunch rslidar_sdk start.launch
若存在报错:
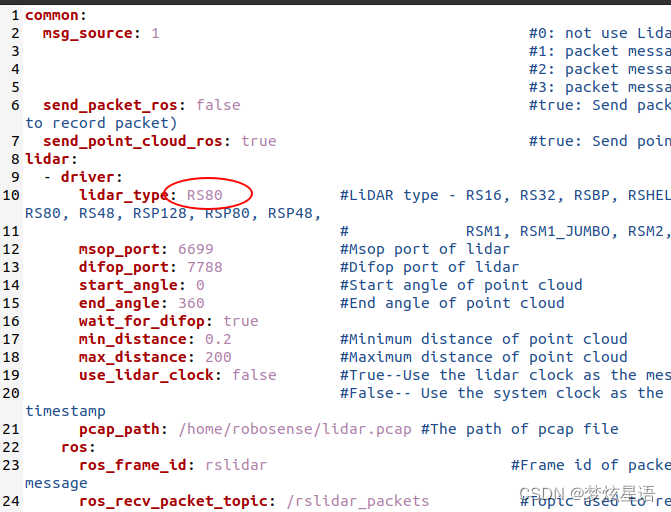
若出现如下界面,说明配置文件里面雷达的类型设置的不对:
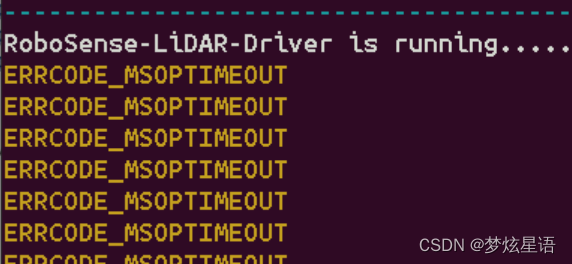
修改这个文件:rslidar_sdk/config/config.yaml
改完还报错的话:重启有线网接口、重启电脑试下