Linux字符设备驱动设计
概述
驱动的定义与功能
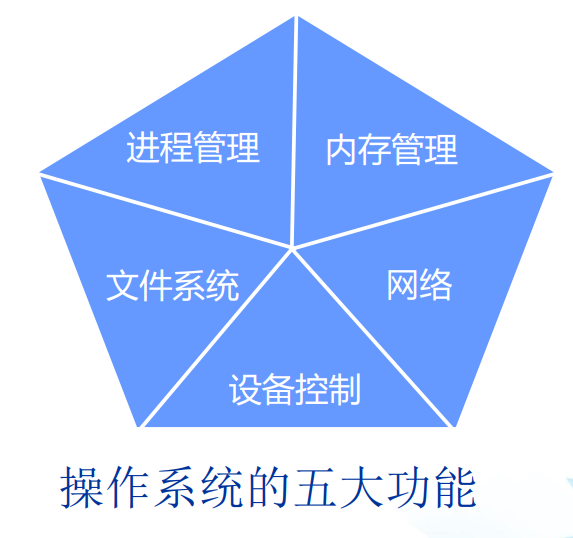
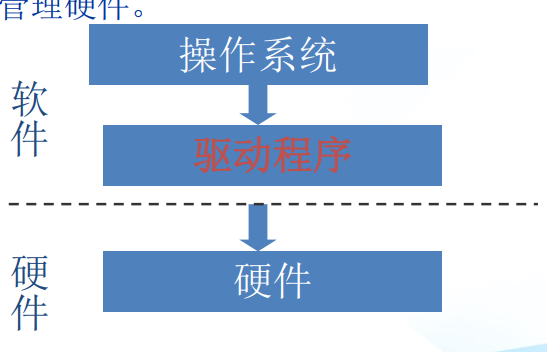
计算机系统中存在着大量的设备, 操作系统要求能够控制和管理这些硬件, 而驱动就是帮助操作系统完成这个任务。
驱动相当于硬件的接口, 它直接操作、 控制着我们的硬件, 操作系统通过驱动这个接口才能管理硬件。
驱动程序与应用程序
驱动程序本身也是代码, 但与应用程序不同, 它不会主动去运行, 而是被调用。 这调用者就是应用程序。
驱动与应用是服务与被服务的关系。 驱动是为应用服务的。因为应用程序很多时候需要用到硬件设备, 但不能直接操作硬件设备, 所以通过系统调用陷入内核调用驱动, 从而操作硬件。
应用与驱动程序在系统中所处位置不同,决定了它们代码运行模式也不一样。
应用程序运行在用户空间(用户态)
驱动代码运行于内核空间(内核态)。
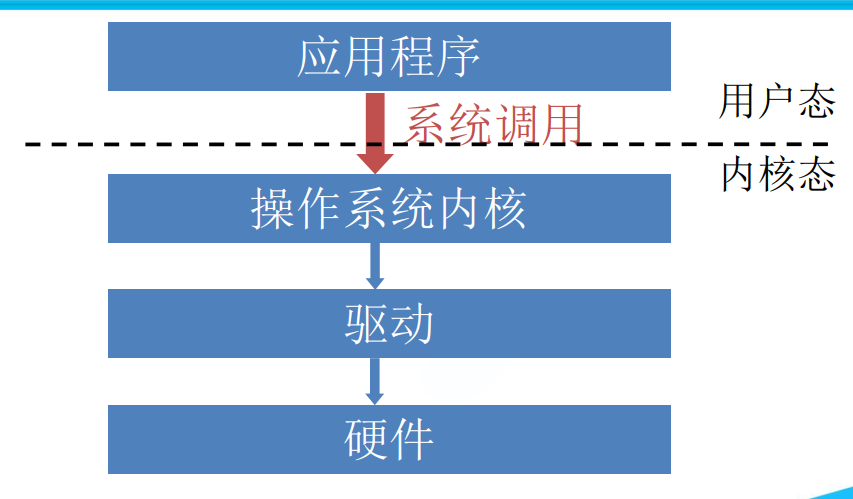
应用要"过五关斩六将" 才能使用硬件设备。
系统调用: 内核提供给用户程序的一组“ 特殊” 函数接口,用户程序可以通过这组接口获得内核提供的服务
驱动/库/内核/应用
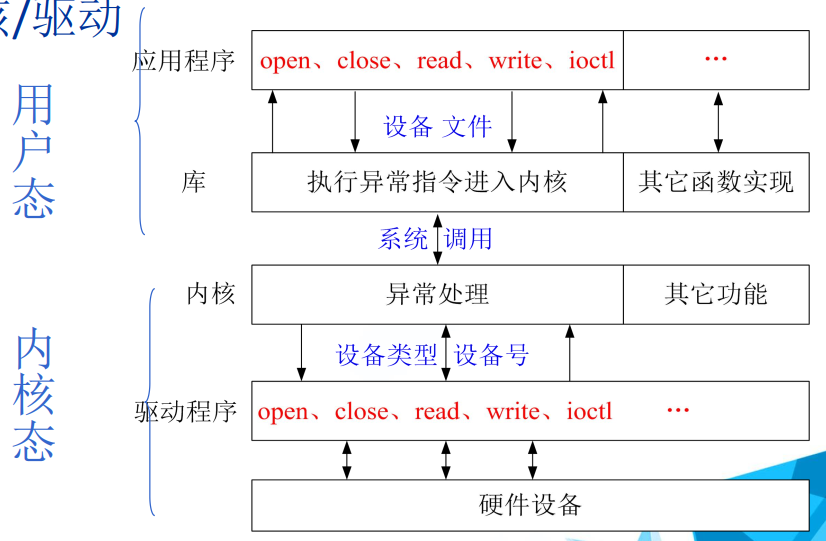
应用程序调用函数库完成一系列功能, 一部分库函数通过系统调用由内核完成相应功能, 例如: printf、 fread函数等等。
内核处理系统调用, 内核在实现系统调用时会根据需要调用设备驱动程序操作硬件。
设备驱动是硬件设备的直接控制者, 它完成了内核和硬件的通信任务
库属于用户态, 驱动属于内核态, 所以驱动无法使用标准C库里面的函数。
printf();
sprintf();
strlen();
内核实现了大部分常用的函数, 供驱动使用。 有些函数名尽管相同, 实现方式是不一样的。
printk();
sprintf();
strlen();
linux驱动相关概念
在linux世界里面, 驱动可分为三大类:
- 字符设备
- 块设备
- 网络设备
字符设备
- I/O传输过程中以字符为单位进行传输。
- 用户对字符设备发出读/写请求时, 实际的硬件读/写操作一般紧接着发生。
块设备
- 块设备与字符相反, 它的数据传输以块( 内存缓冲) 为单位传输。
- 用户对块设备读/写时, 硬件上的读/写操作不会紧接着发生,即用户请求和硬件操作是异步的
- 磁盘类、 闪存类等设备都封装成块设备。
网络设备
网络设备是一类特殊的设备, 它不像字符设备或块设备那样通过对应的设备文件访问, 也不能直接通过read或write
进行数据请求, 而是通过socket接口函数进行访问。
设备文件和主/从设备号
linux把设备抽象成文件,“一切设备皆文件” 。 所以对硬件的操作全部抽象成对文件的操作。
驱动是硬件的最直接操作者, 设备文件是用户程序与设备驱动的一个接口,应用程序通过操作设备文件来调用设备驱动程序。
设备文件存放于/dev目录下, 可以用ls -l或ll查看
每个设备文件都有其文件属性, 属性包括:
- 设备类型(首字母 c=字符设备 b=块设备)
- 主/从设备号


应用程序通过设备文件找到设备驱动
主设备号: 用于标识驱动程序,主设备号一样的设备文件将使用同一类驱动程序。 (1-254)
从设备号: 用于标识使用同一驱动程序的不同具体硬件。(0-255)
例如: 210开发板中的串口设备, 主设备号标识串口这类设备, 从设备号标识具体的某个串口。
# 查看当前系统中主设备号的使用情况和其对应的硬件设备
cat /proc/devices
linux模块编程
Linux内核抛弃把所有功能模块都编译到内核的做法, 采用了模块化的方法将各组件灵活添加和删减, 并且驱动模块还可以动态加载、 删除。
使用模块的好处:
- 内核体积小: 不需要的组件可以不编入内核
- 开发灵活: 模块可以同普通软件一样, 从内核中添加或删除
- 平台无关、 节省内存
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
/*模块加载函数*/
int __init xxx_module_init (void)
{
//...
}
/*模块卸载函数*/
void __exit xxx_module_exit (void)
{
//...
}
/*声明模块加载函数宏*/
module_init(xxx_module_init);
/*声明模块卸载函数宏*/
module_exit(xxx_module_exit);
/*声明模块作者*/
MODULE_AUTHOR(“sunplusedu” );
/*模块许可证明, 描述内核模块的许可权限*/
MODULE_LICENSE("GPL");
模块加载函数
- 完成相关资源申请、 硬件初始化以及驱动的注册
- 若初始化成功返回0, 失败返回错误值
- 模块加载函数必须以" module_init(函数名) "形式进行声明
模块卸载函数:
- 释放已申请资源、 注销驱动
- 在模块卸载时被执行, 不返回任何值
- 函数需要以" module_exit(函数名) "的形式进行声明
Linux内核模块的编译方法有两种:
- 放入Linux内核源码中编译
- 采用独立的方法编译模块
放入Linux内核源码中编译
- 将写好的模块放入Linux内核任一目录下
- 修改相应目录下的Kconfig和Makefile文件
- 执行make modules
- 会在相同目录下生成与源文件同名的.ko文件
采用独立的方法编译模块
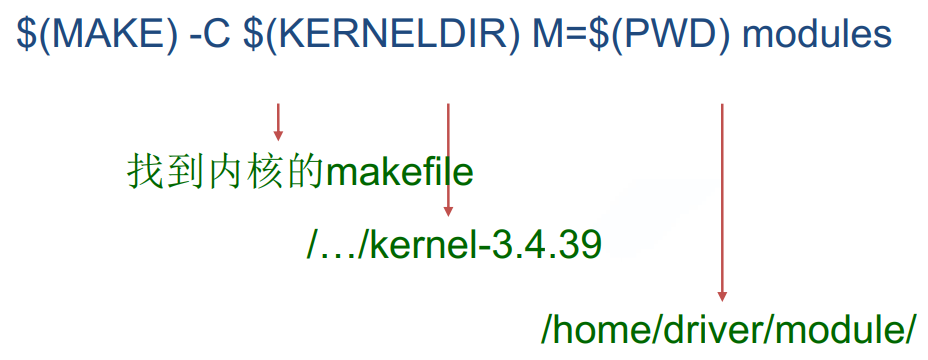
linux内核还提供了一种方法可以独立编译模块, 我们可以在自定义的目录下编译驱动程序, 其makefile内容如下:
#this is a makefile
ifeq ($(KERNELRELEASE),3.4.39)
obj-m := module_test.o #模块名字,与C文件同名
else
KERNELDIR = /…/kernel-3.4.39 #内核路径
PWD = $(shell pwd) #当前路径
default: #编译过程
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
rm -rf *.ko
endif
Linux内核模块的使用:
lsmod # 列举当前系统中的所有模块
insmod xxx.ko # 加载指定模块到内核
rmmod xxx # 卸载指定模块(不需要.ko后缀)
注意事项:
若卸载时出现以下提示:
rmmod:chdir(3.4.39-sunplusedu): No such file or directory
在开发板根文件系统下建立以下目录:
/lib/modules/3.4.39-sunplusedu(跟当前内核版本同名)
字符驱动程序框架
模块是linux内核进行组件管理的一种方式, 驱动是基于模块进行注册和注销的。
不单单是字符设备, 块设备驱动和网络设备驱动都是基于模块进行加载和删除的。
字符设备是最基本、 最常用的设备。 它将千差万别的各种硬件设备采用一个统一的接口封装起来, 屏蔽硬件差异, 简化了应用层的操作。
如: 按键 , LED灯 , 触摸屏 , 温湿度传感器
应用程序的open、 read、 write函数最终会调到驱动里面的open、 read、 write函数
与系统调用函数类似, 驱动的这几个函数参数都是固定不变的, 但函数名可以自己编写
这几个函数是由我们在驱动代码上去实现的, 也就是说, read/write函数要对硬件进行怎样的操作是驱动决定的
file_operations结构体
- 驱动的open/read/write函数实际上是由一个叫 file_operations的结构体统一管理的。
- 这是字符驱动最重要的一个结构体(之一), 里面包含了一组函数指针。 这组函数指针指向驱动open/read/write等几个函数。
- 一个打开的设备文件就和该结构体关联起来, 结构体中的函数实现了对文件的系统调用, 这样file_operations中的函数就 和open/read/write等系统调用函数一一对应
// include/linux/fs.h
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*read_iter) (struct kiocb *, struct iov_iter *);
ssize_t (*write_iter) (struct kiocb *, struct iov_iter *);
int (*iopoll)(struct kiocb *kiocb, bool spin);
int (*iterate) (struct file *, struct dir_context *);
int (*iterate_shared) (struct file *, struct dir_context *);
__poll_t (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
unsigned long mmap_supported_flags;
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, loff_t, loff_t, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **, void **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
void (*show_fdinfo)(struct seq_file *m, struct file *f);
#ifndef CONFIG_MMU
unsigned (*mmap_capabilities)(struct file *);
#endif
ssize_t (*copy_file_range)(struct file *, loff_t, struct file *,
loff_t, size_t, unsigned int);
loff_t (*remap_file_range)(struct file *file_in, loff_t pos_in,
struct file *file_out, loff_t pos_out,
loff_t len, unsigned int remap_flags);
int (*fadvise)(struct file *, loff_t, loff_t, int);
} __randomize_layout;
file_operations 常用函数
struct file_operations {
struct module *owner;
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
int (*open) (struct inode *, struct file *);
int (*release) (struct inode *, struct file *);
}
当执行insmod命令插入一个设备驱动时, 相应的模块初始化函数被执行:
在初始化函数中根据需要申请资源和初始化。
- 中断、 内存等资源申请
- IO口等硬件初始化
利用register_chrdev()把驱动注册进内核
条件:
- 主设备号
- 设备名字
- 填充好的file_operations结构体
字符设备注册函数
/**
* @function: 字符设备注册
* @parameter:
* major: 主设备号, 一般填0, 由内核自动分配
* name: 设备驱动名, 注册成功可以使用 , cat /proc/device 查看
* fops: 填充好的file_operations 结构体变量地址
* @return:
* success: 分配好的主设备号
* error:
* @note:
*/
int register_chrdev(unsigned int major, const char *name, const struct file_operations *fops);
字符设备注销函数
/**
* @function: 字符设备注销
* @parameter:
* major: 主设备号
* name: 设备驱动名
* @return:
* success:
* error:
* @note:
*/
void unregister_chrdev(unsigned int major, const char name)
字符设备驱动编译成功生成.ko文件后, 使用字符驱动
加载驱动程序
- insmod 内核模块文件名.ko
- cat /proc/devices 查看当前系统中所有设备驱动程序及其主设备号
手动建立设备文件
- 设备文件一般建立/dev目录下, 可通过命令创建
- mknod /dev/文件名 c 主设备号 从设备号
采用mknod命令的方式创建设备文件有些繁琐, 就此linux为我们提供了一种udev机制实现设备文件的自动创建(只需在模块初始化函数中添加几行代码) 。
该方式的思想是使用insmod 插入模块时自动创建设备节点, 使用rmmod 卸载模块时删除设备节点
udev是linux2.6内核引入的设备管理器, 主要负责管理 /dev下设备节点
自动创建功能的实现分两步完成
首先定义和创建设备类:
struct class *my_class;
//name: 设备类名
my_class = class_create(THIS_MODULE, name);
根据类创建设备节点:
struct device *my_device;
//MKDEV : 主/次设备号组成一个设备号
//name: 设备节点名
my_device = device_create(my_class, NULL, MKDEV(major_nr, minor_nr), NULL, name);
卸载过程也分为两步完成
首先删除设备节点:
device_destroy(my_class, MKDEV(major_nr, minor_nr));
销毁创建好的设备类:
class_destroy(my_class);
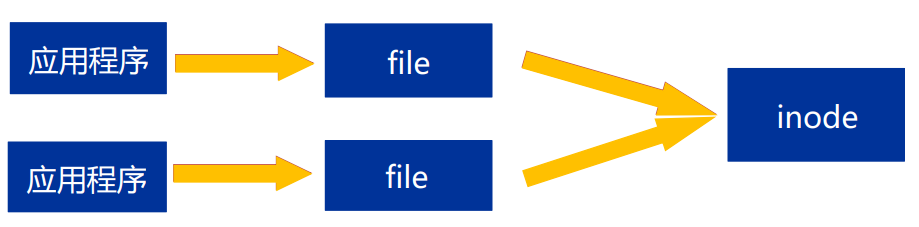
inode结构体
inode结构体记录了文件系统中文件的相关信息, 比如 文件大小、 创建者、 创建日期等等, 我们也称之为“索引节点” , 每个文件都有与之对应的inode, 也就是说 inode表示具体的文件。
file结构体
file结构体是一个内核结构, 它不会出现在用户程序中, 它跟用户空间FILE不是一回事
file结构体代表一个打开的文件(文件描述符) ,在open时它由内核自动创建, 并传递给file_operations所指向的各个函数, 当文件关闭后该结构体被释放。
该结构体记录了文件的读写模式、 文件当前读写位置、 还有file_operations结构体的指针等
inode结构体中包含了设备文件的主从设备号,用户可通过以下宏获取:
unsigned int iminor(struct inode *inode);
unsigned int imajor(struct inode *inode);
用户态与内核态数据的传输
应用程序与驱动程序分属于不同的地址空间, 二者之间的数据应当采用以下函数进行交换
//从内核空间拷贝n字节数据到用户空间
//user_buffer: 标首地址
//kernel_buffer: 源数据首地址
copy_to_user(user_buffer, kernel_buffer, n)
//从用户空间拷贝n字节数据到内核空间
copy_from_user(kernel_buffer, user_buffer, n)
//从内核空间拷贝一数据( 任意类型) 变量到用户空间
put_user(kernel_value, user_buffer)
//从用户空间拷贝一数据( 任意类型) 变量到内核空间
get_user(kernel_value, user_buffer)
//buf :用户传过来的数据
//count: 数据的大小
ssize_t demo_write(struct file *filp, const char *buf, size_t count, loff_t *f_pos)
{
unsigned char aver[100] = {0};
if(copy_to/from_user(aver, buf, count) != 0)
{
return -EFAULT;
}
return count;
}
GPIO程序设计
S5P6818 GPIO寄存器
| GPIOxOUT | GPIOxOUTENB | GPIOxPAD | GPIOxALTFNn |
|---|---|---|---|
| 输出高/低 | 引脚输入/输出 | 读输入高/低电平 | 引脚功能(gpio或其 他固定功能) |
| 每1位配置1个 gpio引脚 | 每1位配置1个 gpio引脚 | 每1位读取1个 gpio引脚 | 每2位配置1个 gpio引脚 |
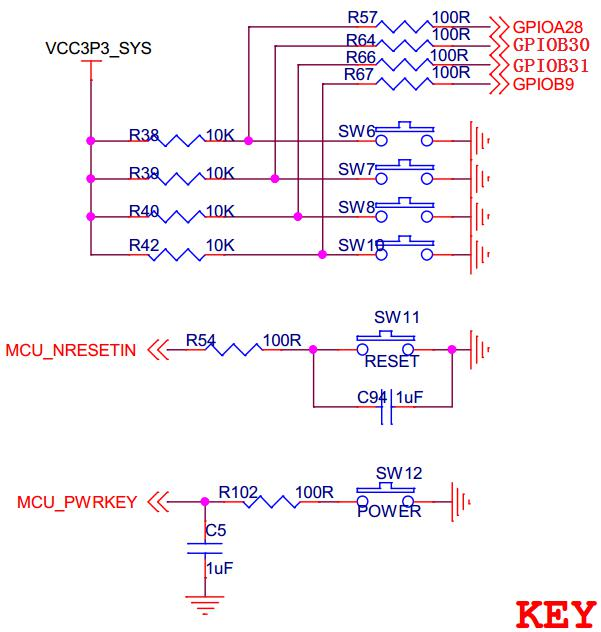
键盘工作原理
3*3键盘可采用轮训方式检测, 配置GPIOA_28、GPIOC_11和GPIOC_12为输入且上拉使能, 然后就是while循环读取输入引脚
配置IO口相关寄存器的两种实现方法:
直接操作gpio相关寄存器
- 和裸机程序gpio配置方式类似, 通过移位操作读写寄存器的值
使用内核的io操作接口函数
- linux内核为方便用户对io口的配置提供了一系列的接口函数,而且我们建议使用该方式, 可以提高代码可移植性
//操作gpio相关寄存器(地址映射)
//头文件
#include <asm/io.h>
#include <linux/ioport.h>
unsigned int reg;
//寄存器虚拟首地址(地址映射)
//映射后的寄存器地址排列顺序和间隔同映射前一致, 因此虚拟首地址+ 偏移量即可得到具体寄存器地址
gpioa_base = ioremap(0xC001A000, 0x64);
//读GPIOAOUTENB寄存器
reg = readl(gpioa_base + 4);
//写GPIOAOUTENB寄存器
writel(reg, gpioa_base + 4);
//linux内核提供了一组函数来操作IO口寄存器, 驱动程序员可直接使用
#include <plat/gpio-cfg.h>
#include <mach/gpio.h>
//LED硬件连接
//GPIO 引脚A30/B00/B10/A8 分别连接 led 1/2/3/4
//LED的IO初始化
//GPIOxALTFNn: 配置为GPIO功能
//GPIOxOUTENB: 配置为输出功能
//点亮LED
//GPIOxOUT: 输出高电平
ioctl驱动接口实现
通过设备驱动程序执行各种类型的硬件控制, 而ioctl可以对此支持
ioctl中的cmd与arg参数都是由程序员自行规定的,具有很高的灵活性
int (*unlocked_ioctl)(struct file *,unsigned int, unsigned long);