1.整体流程
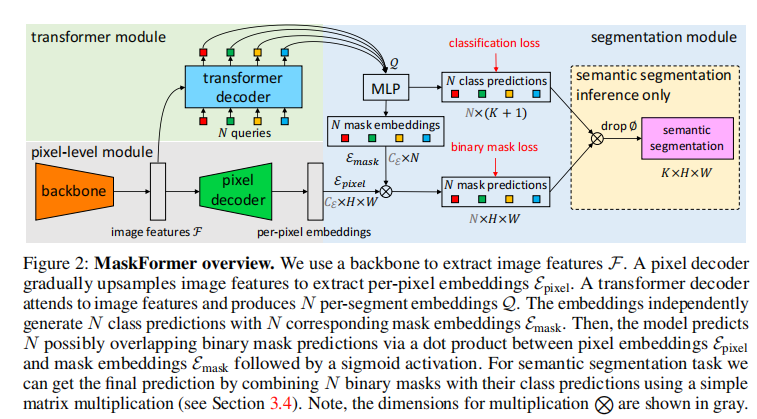
Mask2former流程如图所示,对于输入图片,首先经过Resnet等骨干网络获得多层级特征,对于获得的多层级特征,一个方向经过pixel decoder(基于DetrTransformerEncoderLayer)得到per-pixel embedding,另外一个方向经过transformer decoder,得到mask embedding,矩阵乘法得到mask pediction,对于语义分割任务使用class prediction和mask prediction做矩阵乘法得到预测结果。
2.backbone
可以使用resnet等作为backbone,获得多层级特征。
3.pixel decoder
这个模块进行解码阶段的特征提取,在Mask2former中,为了减少计算量和加速收敛,采用了deformable detr的transformer的设计。具体包括:
- 多层级特征的预处理,包括维度变换、采样点和位置编码
- 使用deformable transformer进行特征提取
- 对特征图进行上采样,并进行特征融合,并根据最后一层特征图学习一个mask
整体代码如下:
class MSDeformAttnPixelDecoder(BaseModule):
"""Pixel decoder with multi-scale deformable attention.
Args:
in_channels (list[int] | tuple[int]): Number of channels in the
input feature maps.
strides (list[int] | tuple[int]): Output strides of feature from
backbone.
feat_channels (int): Number of channels for feature.
out_channels (int): Number of channels for output.
num_outs (int): Number of output scales.
norm_cfg (:obj:`ConfigDict` or dict): Config for normalization.
Defaults to dict(type='GN', num_groups=32).
act_cfg (:obj:`ConfigDict` or dict): Config for activation.
Defaults to dict(type='ReLU').
encoder (:obj:`ConfigDict` or dict): Config for transformer
encoder. Defaults to None.
positional_encoding (:obj:`ConfigDict` or dict): Config for
transformer encoder position encoding. Defaults to
dict(num_feats=128, normalize=True).
init_cfg (:obj:`ConfigDict` or dict or list[:obj:`ConfigDict` or \
dict], optional): Initialization config dict. Defaults to None.
"""
def __init__(self,
in_channels: Union[List[int],
Tuple[int]] = [256, 512, 1024, 2048],
strides: Union[List[int], Tuple[int]] = [4, 8, 16, 32],
feat_channels: int = 256,
out_channels: int = 256,
num_outs: int = 3,
norm_cfg: ConfigType = dict(type='GN', num_groups=32),
act_cfg: ConfigType = dict(type='ReLU'),
encoder: ConfigType = None,
positional_encoding: ConfigType = dict(
num_feats=128, normalize=True),
init_cfg: OptMultiConfig = None) -> None:
super().__init__(init_cfg=init_cfg)
self.strides = strides
self.num_input_levels = len(in_channels)
self.num_encoder_levels = \
encoder.layer_cfg.self_attn_cfg.num_levels
assert self.num_encoder_levels >= 1, \
'num_levels in attn_cfgs must be at least one'
input_conv_list = []
# from top to down (low to high resolution)
for i in range(self.num_input_levels - 1,
self.num_input_levels - self.num_encoder_levels - 1,
-1):
input_conv = ConvModule(
in_channels[i],
feat_channels,
kernel_size=1,
norm_cfg=norm_cfg,
act_cfg=None,
bias=True)
input_conv_list.append(input_conv)
self.input_convs = ModuleList(input_conv_list)
self.encoder = Mask2FormerTransformerEncoder(**encoder)
self.postional_encoding = SinePositionalEncoding(**positional_encoding)
# high resolution to low resolution
self.level_encoding = nn.Embedding(self.num_encoder_levels,
feat_channels)
# fpn-like structure
self.lateral_convs = ModuleList()
self.output_convs = ModuleList()
self.use_bias = norm_cfg is None
# from top to down (low to high resolution)
# fpn for the rest features that didn't pass in encoder
for i in range(self.num_input_levels - self.num_encoder_levels - 1, -1,
-1):
lateral_conv = ConvModule(
in_channels[i],
feat_channels,
kernel_size=1,
bias=self.use_bias,
norm_cfg=norm_cfg,
act_cfg=None)
output_conv = ConvModule(
feat_channels,
feat_channels,
kernel_size=3,
stride=1,
padding=1,
bias=self.use_bias,
norm_cfg=norm_cfg,
act_cfg=act_cfg)
self.lateral_convs.append(lateral_conv)
self.output_convs.append(output_conv)
self.mask_feature = Conv2d(
feat_channels, out_channels, kernel_size=1, stride=1, padding=0)
self.num_outs = num_outs
self.point_generator = MlvlPointGenerator(strides)
def init_weights(self) -> None:
"""Initialize weights."""
for i in range(0, self.num_encoder_levels):
xavier_init(
self.input_convs[i].conv,
gain=1,
bias=0,
distribution='uniform')
for i in range(0, self.num_input_levels - self.num_encoder_levels):
caffe2_xavier_init(self.lateral_convs[i].conv, bias=0)
caffe2_xavier_init(self.output_convs[i].conv, bias=0)
caffe2_xavier_init(self.mask_feature, bias=0)
normal_init(self.level_encoding, mean=0, std=1)
for p in self.encoder.parameters():
if p.dim() > 1:
nn.init.xavier_normal_(p)
# init_weights defined in MultiScaleDeformableAttention
for m in self.encoder.layers.modules():
if isinstance(m, MultiScaleDeformableAttention):
m.init_weights()
def forward(self, feats: List[Tensor]) -> Tuple[Tensor, Tensor]:
"""
Args:
feats (list[Tensor]): Feature maps of each level. Each has
shape of (batch_size, c, h, w).
Returns:
tuple: A tuple containing the following:
- mask_feature (Tensor): shape (batch_size, c, h, w).
- multi_scale_features (list[Tensor]): Multi scale \
features, each in shape (batch_size, c, h, w).
"""
# generate padding mask for each level, for each image
batch_size = feats[0].shape[0]
encoder_input_list = []
padding_mask_list = []
level_positional_encoding_list = []
spatial_shapes = []
reference_points_list = []
for i in range(self.num_encoder_levels):
level_idx = self.num_input_levels - i - 1
feat = feats[level_idx]
feat_projected = self.input_convs[i](feat)
feat_hw = torch._shape_as_tensor(feat)[2:].to(feat.device)
# no padding padding部分mask掉
padding_mask_resized = feat.new_zeros(
(batch_size, ) + feat.shape[-2:], dtype=torch.bool)
pos_embed = self.postional_encoding(padding_mask_resized) # 正弦位置编码,与特征图大小对应
level_embed = self.level_encoding.weight[i] # 层级位置编码,就是256维向量
level_pos_embed = level_embed.view(1, -1, 1, 1) + pos_embed
# (h_i * w_i, 2) 采样点
reference_points = self.point_generator.single_level_grid_priors(
feat.shape[-2:], level_idx, device=feat.device)
# normalize
feat_wh = feat_hw.unsqueeze(0).flip(dims=[0, 1])
factor = feat_wh * self.strides[level_idx]
reference_points = reference_points / factor
# shape (batch_size, c, h_i, w_i) -> (h_i * w_i, batch_size, c) 维度转换
feat_projected = feat_projected.flatten(2).permute(0, 2, 1)
level_pos_embed = level_pos_embed.flatten(2).permute(0, 2, 1)
padding_mask_resized = padding_mask_resized.flatten(1)
# 各个层级加入列表
encoder_input_list.append(feat_projected)
padding_mask_list.append(padding_mask_resized)
level_positional_encoding_list.append(level_pos_embed)
spatial_shapes.append(feat_hw)
reference_points_list.append(reference_points)
# shape (batch_size, total_num_queries),
# total_num_queries=sum([., h_i * w_i,.])
padding_masks = torch.cat(padding_mask_list, dim=1)
# shape (total_num_queries, batch_size, c) 拼接各个层级
encoder_inputs = torch.cat(encoder_input_list, dim=1)
level_positional_encodings = torch.cat(
level_positional_encoding_list, dim=1)
# shape (num_encoder_levels, 2), from low
# resolution to high resolution 各个层级的分界
num_queries_per_level = [e[0] * e[1] for e in spatial_shapes]
spatial_shapes = torch.cat(spatial_shapes).view(-1, 2) # 各个层级特征图大小
# shape (0, h_0*w_0, h_0*w_0+h_1*w_1, ...)
level_start_index = torch.cat((spatial_shapes.new_zeros(
(1, )), spatial_shapes.prod(1).cumsum(0)[:-1]))
reference_points = torch.cat(reference_points_list, dim=0) # 采样参考点
reference_points = reference_points[None, :, None].repeat(
batch_size, 1, self.num_encoder_levels, 1)
valid_radios = reference_points.new_ones( # 哪一个层级不用
(batch_size, self.num_encoder_levels, 2))
# shape (num_total_queries, batch_size, c) deformable transformer进行特征提取
memory = self.encoder(
query=encoder_inputs,
query_pos=level_positional_encodings,
key_padding_mask=padding_masks,
spatial_shapes=spatial_shapes,
reference_points=reference_points,
level_start_index=level_start_index,
valid_ratios=valid_radios)
# (batch_size, c, num_total_queries)
memory = memory.permute(0, 2, 1)
# from low resolution to high resolution
outs = torch.split(memory, num_queries_per_level, dim=-1) # 将各个层级分开
outs = [
x.reshape(batch_size, -1, spatial_shapes[i][0],
spatial_shapes[i][1]) for i, x in enumerate(outs)
]
# 上采样与特征融合
for i in range(self.num_input_levels - self.num_encoder_levels - 1, -1,
-1):
x = feats[i]
cur_feat = self.lateral_convs[i](x)
y = cur_feat + F.interpolate(
outs[-1],
size=cur_feat.shape[-2:],
mode='bilinear',
align_corners=False)
y = self.output_convs[i](y)
outs.append(y)
multi_scale_features = outs[:self.num_outs]
mask_feature = self.mask_feature(outs[-1]) # 根据最后一层特征图学习一个mask
return mask_feature, multi_scale_featuresdeformable transformer
在deformerable transformer中,需要根据query预测一个偏移量和注意力权重,然后根据采样点和偏移量完成对V的采样,并完成attention_score*v。
class MultiScaleDeformableAttention(BaseModule):
"""An attention module used in Deformable-Detr.
`Deformable DETR: Deformable Transformers for End-to-End Object Detection.
<https://arxiv.org/pdf/2010.04159.pdf>`_.
Args:
embed_dims (int): The embedding dimension of Attention.
Default: 256.
num_heads (int): Parallel attention heads. Default: 8.
num_levels (int): The number of feature map used in
Attention. Default: 4.
num_points (int): The number of sampling points for
each query in each head. Default: 4.
im2col_step (int): The step used in image_to_column.
Default: 64.
dropout (float): A Dropout layer on `inp_identity`.
Default: 0.1.
batch_first (bool): Key, Query and Value are shape of
(batch, n, embed_dim)
or (n, batch, embed_dim). Default to False.
norm_cfg (dict): Config dict for normalization layer.
Default: None.
init_cfg (obj:`mmcv.ConfigDict`): The Config for initialization.
Default: None.
value_proj_ratio (float): The expansion ratio of value_proj.
Default: 1.0.
"""
def __init__(self,
embed_dims: int = 256,
num_heads: int = 8,
num_levels: int = 4,
num_points: int = 4,
im2col_step: int = 64,
dropout: float = 0.1,
batch_first: bool = False,
norm_cfg: Optional[dict] = None,
init_cfg: Optional[mmengine.ConfigDict] = None,
value_proj_ratio: float = 1.0):
super().__init__(init_cfg)
if embed_dims % num_heads != 0:
raise ValueError(f'embed_dims must be divisible by num_heads, '
f'but got {embed_dims} and {num_heads}')
dim_per_head = embed_dims // num_heads
self.norm_cfg = norm_cfg
self.dropout = nn.Dropout(dropout)
self.batch_first = batch_first
# you'd better set dim_per_head to a power of 2
# which is more efficient in the CUDA implementation
def _is_power_of_2(n):
if (not isinstance(n, int)) or (n < 0):
raise ValueError(
'invalid input for _is_power_of_2: {} (type: {})'.format(
n, type(n)))
return (n & (n - 1) == 0) and n != 0
if not _is_power_of_2(dim_per_head):
warnings.warn(
"You'd better set embed_dims in "
'MultiScaleDeformAttention to make '
'the dimension of each attention head a power of 2 '
'which is more efficient in our CUDA implementation.')
self.im2col_step = im2col_step
self.embed_dims = embed_dims
self.num_levels = num_levels
self.num_heads = num_heads
self.num_points = num_points
self.sampling_offsets = nn.Linear(
embed_dims, num_heads * num_levels * num_points * 2)
self.attention_weights = nn.Linear(embed_dims,
num_heads * num_levels * num_points)
value_proj_size = int(embed_dims * value_proj_ratio)
self.value_proj = nn.Linear(embed_dims, value_proj_size)
self.output_proj = nn.Linear(value_proj_size, embed_dims)
self.init_weights()
def init_weights(self) -> None:
"""Default initialization for Parameters of Module."""
constant_init(self.sampling_offsets, 0.)
device = next(self.parameters()).device
thetas = torch.arange(
self.num_heads, dtype=torch.float32,
device=device) * (2.0 * math.pi / self.num_heads)
grid_init = torch.stack([thetas.cos(), thetas.sin()], -1)
grid_init = (grid_init /
grid_init.abs().max(-1, keepdim=True)[0]).view(
self.num_heads, 1, 1,
2).repeat(1, self.num_levels, self.num_points, 1)
for i in range(self.num_points):
grid_init[:, :, i, :] *= i + 1
self.sampling_offsets.bias.data = grid_init.view(-1)
constant_init(self.attention_weights, val=0., bias=0.)
xavier_init(self.value_proj, distribution='uniform', bias=0.)
xavier_init(self.output_proj, distribution='uniform', bias=0.)
self._is_init = True
@no_type_check
@deprecated_api_warning({'residual': 'identity'},
cls_name='MultiScaleDeformableAttention')
def forward(self,
query: torch.Tensor,
key: Optional[torch.Tensor] = None,
value: Optional[torch.Tensor] = None,
identity: Optional[torch.Tensor] = None,
query_pos: Optional[torch.Tensor] = None,
key_padding_mask: Optional[torch.Tensor] = None,
reference_points: Optional[torch.Tensor] = None,
spatial_shapes: Optional[torch.Tensor] = None,
level_start_index: Optional[torch.Tensor] = None,
**kwargs) -> torch.Tensor:
"""Forward Function of MultiScaleDeformAttention.
Args:
query (torch.Tensor): Query of Transformer with shape
(num_query, bs, embed_dims).
key (torch.Tensor): The key tensor with shape
`(num_key, bs, embed_dims)`.
value (torch.Tensor): The value tensor with shape
`(num_key, bs, embed_dims)`.
identity (torch.Tensor): The tensor used for addition, with the
same shape as `query`. Default None. If None,
`query` will be used.
query_pos (torch.Tensor): The positional encoding for `query`.
Default: None.
key_padding_mask (torch.Tensor): ByteTensor for `query`, with
shape [bs, num_key].
reference_points (torch.Tensor): The normalized reference
points with shape (bs, num_query, num_levels, 2),
all elements is range in [0, 1], top-left (0,0),
bottom-right (1, 1), including padding area.
or (N, Length_{query}, num_levels, 4), add
additional two dimensions is (w, h) to
form reference boxes.
spatial_shapes (torch.Tensor): Spatial shape of features in
different levels. With shape (num_levels, 2),
last dimension represents (h, w).
level_start_index (torch.Tensor): The start index of each level.
A tensor has shape ``(num_levels, )`` and can be represented
as [0, h_0*w_0, h_0*w_0+h_1*w_1, ...].
Returns:
torch.Tensor: forwarded results with shape
[num_query, bs, embed_dims].
"""
if value is None:
value = query
if identity is None:
identity = query
if query_pos is not None:
query = query + query_pos
if not self.batch_first:
# change to (bs, num_query ,embed_dims)
query = query.permute(1, 0, 2)
value = value.permute(1, 0, 2)
bs, num_query, _ = query.shape
bs, num_value, _ = value.shape
assert (spatial_shapes[:, 0] * spatial_shapes[:, 1]).sum() == num_value
value = self.value_proj(value) # 全连接层,得到v
if key_padding_mask is not None: # mask,可能有维度不对应的情况
value = value.masked_fill(key_padding_mask[..., None], 0.0)
value = value.view(bs, num_value, self.num_heads, -1)
sampling_offsets = self.sampling_offsets(query).view( # 通过query预测一个偏移量,MLP层输出通道数满足:nem_heads*num_levels*num_points*2
bs, num_query, self.num_heads, self.num_levels, self.num_points, 2)
attention_weights = self.attention_weights(query).view( # 通过query预测注意力权重,num_heads*num_levels*num_points
bs, num_query, self.num_heads, self.num_levels * self.num_points)
attention_weights = attention_weights.softmax(-1)
attention_weights = attention_weights.view(bs, num_query,
self.num_heads,
self.num_levels,
self.num_points)
if reference_points.shape[-1] == 2: # 进一步得到偏移后点的坐标[-1,+1]
offset_normalizer = torch.stack(
[spatial_shapes[..., 1], spatial_shapes[..., 0]], -1)
sampling_locations = reference_points[:, :, None, :, None, :] \
+ sampling_offsets \
/ offset_normalizer[None, None, None, :, None, :]
elif reference_points.shape[-1] == 4:
sampling_locations = reference_points[:, :, None, :, None, :2] \
+ sampling_offsets / self.num_points \
* reference_points[:, :, None, :, None, 2:] \
* 0.5
else:
raise ValueError(
f'Last dim of reference_points must be'
f' 2 or 4, but get {reference_points.shape[-1]} instead.')
if ((IS_CUDA_AVAILABLE and value.is_cuda)
or (IS_MLU_AVAILABLE and value.is_mlu)):
output = MultiScaleDeformableAttnFunction.apply( # 完成采样和attention*v
value, spatial_shapes, level_start_index, sampling_locations,
attention_weights, self.im2col_step)
else:
output = multi_scale_deformable_attn_pytorch(
value, spatial_shapes, sampling_locations, attention_weights)
output = self.output_proj(output) # 输出的全连接层
if not self.batch_first:
# (num_query, bs ,embed_dims)
output = output.permute(1, 0, 2)
return self.dropout(output) + identity # dropout和残差def multi_scale_deformable_attn_pytorch(
value: torch.Tensor, value_spatial_shapes: torch.Tensor,
sampling_locations: torch.Tensor,
attention_weights: torch.Tensor) -> torch.Tensor:
"""CPU version of multi-scale deformable attention.
Args:
value (torch.Tensor): The value has shape
(bs, num_keys, num_heads, embed_dims//num_heads)
value_spatial_shapes (torch.Tensor): Spatial shape of
each feature map, has shape (num_levels, 2),
last dimension 2 represent (h, w)
sampling_locations (torch.Tensor): The location of sampling points,
has shape
(bs ,num_queries, num_heads, num_levels, num_points, 2),
the last dimension 2 represent (x, y).
attention_weights (torch.Tensor): The weight of sampling points used
when calculate the attention, has shape
(bs ,num_queries, num_heads, num_levels, num_points),
Returns:
torch.Tensor: has shape (bs, num_queries, embed_dims)
"""
bs, _, num_heads, embed_dims = value.shape
_, num_queries, num_heads, num_levels, num_points, _ =\
sampling_locations.shape
value_list = value.split([H_ * W_ for H_, W_ in value_spatial_shapes],
dim=1) # 分离各个层级
sampling_grids = 2 * sampling_locations - 1
sampling_value_list = [] # 对各个层级进行采样
for level, (H_, W_) in enumerate(value_spatial_shapes):
# bs, H_*W_, num_heads, embed_dims ->
# bs, H_*W_, num_heads*embed_dims ->
# bs, num_heads*embed_dims, H_*W_ ->
# bs*num_heads, embed_dims, H_, W_
value_l_ = value_list[level].flatten(2).transpose(1, 2).reshape(
bs * num_heads, embed_dims, H_, W_)
# bs, num_queries, num_heads, num_points, 2 ->
# bs, num_heads, num_queries, num_points, 2 ->
# bs*num_heads, num_queries, num_points, 2
sampling_grid_l_ = sampling_grids[:, :, :,
level].transpose(1, 2).flatten(0, 1)
# bs*num_heads, embed_dims, num_queries, num_points
sampling_value_l_ = F.grid_sample(
value_l_,
sampling_grid_l_,
mode='bilinear',
padding_mode='zeros',
align_corners=False)
sampling_value_list.append(sampling_value_l_)
# (bs, num_queries, num_heads, num_levels, num_points) ->
# (bs, num_heads, num_queries, num_levels, num_points) ->
# (bs, num_heads, 1, num_queries, num_levels*num_points)
attention_weights = attention_weights.transpose(1, 2).reshape(
bs * num_heads, 1, num_queries, num_levels * num_points) # attention*V
output = (torch.stack(sampling_value_list, dim=-2).flatten(-2) *
attention_weights).sum(-1).view(bs, num_heads * embed_dims,
num_queries)
return output.transpose(1, 2).contiguous()4.transformer decoder
transformer decoder预测一组mask,每个mask包含了预测的实例对象相关的信息。具体流程为:
- 首先,初始化一组query
- 得到query的类别预测,mask预测,同时得到cross attention的attention mask
- 经过交叉注意力和自注意力进行特征提取与特征融合
交叉注意力与自注意力:
class Mask2FormerTransformerDecoderLayer(DetrTransformerDecoderLayer):
"""Implements decoder layer in Mask2Former transformer."""
def forward(self,
query: Tensor,
key: Tensor = None,
value: Tensor = None,
query_pos: Tensor = None,
key_pos: Tensor = None,
self_attn_mask: Tensor = None,
cross_attn_mask: Tensor = None,
key_padding_mask: Tensor = None,
**kwargs) -> Tensor:
"""
Args:
query (Tensor): The input query, has shape (bs, num_queries, dim).
key (Tensor, optional): The input key, has shape (bs, num_keys,
dim). If `None`, the `query` will be used. Defaults to `None`.
value (Tensor, optional): The input value, has the same shape as
`key`, as in `nn.MultiheadAttention.forward`. If `None`, the
`key` will be used. Defaults to `None`.
query_pos (Tensor, optional): The positional encoding for `query`,
has the same shape as `query`. If not `None`, it will be added
to `query` before forward function. Defaults to `None`.
key_pos (Tensor, optional): The positional encoding for `key`, has
the same shape as `key`. If not `None`, it will be added to
`key` before forward function. If None, and `query_pos` has the
same shape as `key`, then `query_pos` will be used for
`key_pos`. Defaults to None.
self_attn_mask (Tensor, optional): ByteTensor mask, has shape
(num_queries, num_keys), as in `nn.MultiheadAttention.forward`.
Defaults to None.
cross_attn_mask (Tensor, optional): ByteTensor mask, has shape
(num_queries, num_keys), as in `nn.MultiheadAttention.forward`.
Defaults to None.
key_padding_mask (Tensor, optional): The `key_padding_mask` of
`self_attn` input. ByteTensor, has shape (bs, num_value).
Defaults to None.
Returns:
Tensor: forwarded results, has shape (bs, num_queries, dim).
"""
query = self.cross_attn(
query=query,
key=key,
value=value,
query_pos=query_pos,
key_pos=key_pos,
attn_mask=cross_attn_mask,
key_padding_mask=key_padding_mask,
**kwargs)
query = self.norms[0](query)
query = self.self_attn(
query=query,
key=query,
value=query,
query_pos=query_pos,
key_pos=query_pos,
attn_mask=self_attn_mask,
**kwargs)
query = self.norms[1](query)
query = self.ffn(query)
query = self.norms[2](query)
return querypixel decoder和transformer decoder网络流程:
class Mask2FormerHead(MaskFormerHead):
"""Implements the Mask2Former head.
See `Masked-attention Mask Transformer for Universal Image
Segmentation <https://arxiv.org/pdf/2112.01527>`_ for details.
Args:
in_channels (list[int]): Number of channels in the input feature map.
feat_channels (int): Number of channels for features.
out_channels (int): Number of channels for output.
num_things_classes (int): Number of things.
num_stuff_classes (int): Number of stuff.
num_queries (int): Number of query in Transformer decoder.
pixel_decoder (:obj:`ConfigDict` or dict): Config for pixel
decoder. Defaults to None.
enforce_decoder_input_project (bool, optional): Whether to add
a layer to change the embed_dim of tranformer encoder in
pixel decoder to the embed_dim of transformer decoder.
Defaults to False.
transformer_decoder (:obj:`ConfigDict` or dict): Config for
transformer decoder. Defaults to None.
positional_encoding (:obj:`ConfigDict` or dict): Config for
transformer decoder position encoding. Defaults to
dict(num_feats=128, normalize=True).
loss_cls (:obj:`ConfigDict` or dict): Config of the classification
loss. Defaults to None.
loss_mask (:obj:`ConfigDict` or dict): Config of the mask loss.
Defaults to None.
loss_dice (:obj:`ConfigDict` or dict): Config of the dice loss.
Defaults to None.
train_cfg (:obj:`ConfigDict` or dict, optional): Training config of
Mask2Former head.
test_cfg (:obj:`ConfigDict` or dict, optional): Testing config of
Mask2Former head.
init_cfg (:obj:`ConfigDict` or dict or list[:obj:`ConfigDict` or \
dict], optional): Initialization config dict. Defaults to None.
"""
def __init__(self,
in_channels: List[int],
feat_channels: int,
out_channels: int,
num_things_classes: int = 80,
num_stuff_classes: int = 53,
num_queries: int = 100,
num_transformer_feat_level: int = 3,
pixel_decoder: ConfigType = ...,
enforce_decoder_input_project: bool = False,
transformer_decoder: ConfigType = ...,
positional_encoding: ConfigType = dict(
num_feats=128, normalize=True),
loss_cls: ConfigType = dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=2.0,
reduction='mean',
class_weight=[1.0] * 133 + [0.1]),
loss_mask: ConfigType = dict(
type='CrossEntropyLoss',
use_sigmoid=True,
reduction='mean',
loss_weight=5.0),
loss_dice: ConfigType = dict(
type='DiceLoss',
use_sigmoid=True,
activate=True,
reduction='mean',
naive_dice=True,
eps=1.0,
loss_weight=5.0),
train_cfg: OptConfigType = None,
test_cfg: OptConfigType = None,
init_cfg: OptMultiConfig = None,
**kwargs) -> None:
super(AnchorFreeHead, self).__init__(init_cfg=init_cfg)
self.num_things_classes = num_things_classes
self.num_stuff_classes = num_stuff_classes
self.num_classes = self.num_things_classes + self.num_stuff_classes
self.num_queries = num_queries
self.num_transformer_feat_level = num_transformer_feat_level
self.num_heads = transformer_decoder.layer_cfg.cross_attn_cfg.num_heads
self.num_transformer_decoder_layers = transformer_decoder.num_layers
assert pixel_decoder.encoder.layer_cfg. \
self_attn_cfg.num_levels == num_transformer_feat_level
pixel_decoder_ = copy.deepcopy(pixel_decoder)
pixel_decoder_.update(
in_channels=in_channels,
feat_channels=feat_channels,
out_channels=out_channels)
self.pixel_decoder = MODELS.build(pixel_decoder_)
self.transformer_decoder = Mask2FormerTransformerDecoder(
**transformer_decoder)
self.decoder_embed_dims = self.transformer_decoder.embed_dims
self.decoder_input_projs = ModuleList()
# from low resolution to high resolution
for _ in range(num_transformer_feat_level):
if (self.decoder_embed_dims != feat_channels
or enforce_decoder_input_project):
self.decoder_input_projs.append(
Conv2d(
feat_channels, self.decoder_embed_dims, kernel_size=1))
else:
self.decoder_input_projs.append(nn.Identity())
self.decoder_positional_encoding = SinePositionalEncoding(
**positional_encoding)
self.query_embed = nn.Embedding(self.num_queries, feat_channels)
self.query_feat = nn.Embedding(self.num_queries, feat_channels)
# from low resolution to high resolution
self.level_embed = nn.Embedding(self.num_transformer_feat_level,
feat_channels)
self.cls_embed = nn.Linear(feat_channels, self.num_classes + 1)
self.mask_embed = nn.Sequential(
nn.Linear(feat_channels, feat_channels), nn.ReLU(inplace=True),
nn.Linear(feat_channels, feat_channels), nn.ReLU(inplace=True),
nn.Linear(feat_channels, out_channels))
self.test_cfg = test_cfg
self.train_cfg = train_cfg
if train_cfg:
self.assigner = TASK_UTILS.build(self.train_cfg['assigner'])
self.sampler = TASK_UTILS.build(
self.train_cfg['sampler'], default_args=dict(context=self))
self.num_points = self.train_cfg.get('num_points', 12544)
self.oversample_ratio = self.train_cfg.get('oversample_ratio', 3.0)
self.importance_sample_ratio = self.train_cfg.get(
'importance_sample_ratio', 0.75)
self.class_weight = loss_cls.class_weight
self.loss_cls = MODELS.build(loss_cls)
self.loss_mask = MODELS.build(loss_mask)
self.loss_dice = MODELS.build(loss_dice)
def init_weights(self) -> None:
for m in self.decoder_input_projs:
if isinstance(m, Conv2d):
caffe2_xavier_init(m, bias=0)
self.pixel_decoder.init_weights()
for p in self.transformer_decoder.parameters():
if p.dim() > 1:
nn.init.xavier_normal_(p)
def _get_targets_single(self, cls_score: Tensor, mask_pred: Tensor,
gt_instances: InstanceData,
img_meta: dict) -> Tuple[Tensor]:
"""Compute classification and mask targets for one image.
Args:
cls_score (Tensor): Mask score logits from a single decoder layer
for one image. Shape (num_queries, cls_out_channels).
mask_pred (Tensor): Mask logits for a single decoder layer for one
image. Shape (num_queries, h, w).
gt_instances (:obj:`InstanceData`): It contains ``labels`` and
``masks``.
img_meta (dict): Image informtation.
Returns:
tuple[Tensor]: A tuple containing the following for one image.
- labels (Tensor): Labels of each image. \
shape (num_queries, ).
- label_weights (Tensor): Label weights of each image. \
shape (num_queries, ).
- mask_targets (Tensor): Mask targets of each image. \
shape (num_queries, h, w).
- mask_weights (Tensor): Mask weights of each image. \
shape (num_queries, ).
- pos_inds (Tensor): Sampled positive indices for each \
image.
- neg_inds (Tensor): Sampled negative indices for each \
image.
- sampling_result (:obj:`SamplingResult`): Sampling results.
"""
gt_labels = gt_instances.labels
gt_masks = gt_instances.masks
# sample points
num_queries = cls_score.shape[0]
num_gts = gt_labels.shape[0]
point_coords = torch.rand((1, self.num_points, 2),
device=cls_score.device)
# shape (num_queries, num_points)
mask_points_pred = point_sample(
mask_pred.unsqueeze(1), point_coords.repeat(num_queries, 1,
1)).squeeze(1)
# shape (num_gts, num_points)
gt_points_masks = point_sample(
gt_masks.unsqueeze(1).float(), point_coords.repeat(num_gts, 1,
1)).squeeze(1)
sampled_gt_instances = InstanceData(
labels=gt_labels, masks=gt_points_masks)
sampled_pred_instances = InstanceData(
scores=cls_score, masks=mask_points_pred)
# assign and sample
assign_result = self.assigner.assign(
pred_instances=sampled_pred_instances,
gt_instances=sampled_gt_instances,
img_meta=img_meta)
pred_instances = InstanceData(scores=cls_score, masks=mask_pred)
sampling_result = self.sampler.sample(
assign_result=assign_result,
pred_instances=pred_instances,
gt_instances=gt_instances)
pos_inds = sampling_result.pos_inds
neg_inds = sampling_result.neg_inds
# label target
labels = gt_labels.new_full((self.num_queries, ),
self.num_classes,
dtype=torch.long)
labels[pos_inds] = gt_labels[sampling_result.pos_assigned_gt_inds]
label_weights = gt_labels.new_ones((self.num_queries, ))
# mask target
mask_targets = gt_masks[sampling_result.pos_assigned_gt_inds]
mask_weights = mask_pred.new_zeros((self.num_queries, ))
mask_weights[pos_inds] = 1.0
return (labels, label_weights, mask_targets, mask_weights, pos_inds,
neg_inds, sampling_result)
def _loss_by_feat_single(self, cls_scores: Tensor, mask_preds: Tensor,
batch_gt_instances: List[InstanceData],
batch_img_metas: List[dict]) -> Tuple[Tensor]:
"""Loss function for outputs from a single decoder layer.
Args:
cls_scores (Tensor): Mask score logits from a single decoder layer
for all images. Shape (batch_size, num_queries,
cls_out_channels). Note `cls_out_channels` should includes
background.
mask_preds (Tensor): Mask logits for a pixel decoder for all
images. Shape (batch_size, num_queries, h, w).
batch_gt_instances (list[obj:`InstanceData`]): each contains
``labels`` and ``masks``.
batch_img_metas (list[dict]): List of image meta information.
Returns:
tuple[Tensor]: Loss components for outputs from a single \
decoder layer.
"""
num_imgs = cls_scores.size(0)
cls_scores_list = [cls_scores[i] for i in range(num_imgs)]
mask_preds_list = [mask_preds[i] for i in range(num_imgs)]
(labels_list, label_weights_list, mask_targets_list, mask_weights_list,
avg_factor) = self.get_targets(cls_scores_list, mask_preds_list,
batch_gt_instances, batch_img_metas)
# shape (batch_size, num_queries)
labels = torch.stack(labels_list, dim=0)
# shape (batch_size, num_queries)
label_weights = torch.stack(label_weights_list, dim=0)
# shape (num_total_gts, h, w)
mask_targets = torch.cat(mask_targets_list, dim=0)
# shape (batch_size, num_queries)
mask_weights = torch.stack(mask_weights_list, dim=0)
# classfication loss
# shape (batch_size * num_queries, )
cls_scores = cls_scores.flatten(0, 1)
labels = labels.flatten(0, 1)
label_weights = label_weights.flatten(0, 1)
class_weight = cls_scores.new_tensor(self.class_weight)
loss_cls = self.loss_cls(
cls_scores,
labels,
label_weights,
avg_factor=class_weight[labels].sum())
num_total_masks = reduce_mean(cls_scores.new_tensor([avg_factor]))
num_total_masks = max(num_total_masks, 1)
# extract positive ones
# shape (batch_size, num_queries, h, w) -> (num_total_gts, h, w)
mask_preds = mask_preds[mask_weights > 0]
if mask_targets.shape[0] == 0:
# zero match
loss_dice = mask_preds.sum()
loss_mask = mask_preds.sum()
return loss_cls, loss_mask, loss_dice
with torch.no_grad():
points_coords = get_uncertain_point_coords_with_randomness(
mask_preds.unsqueeze(1), None, self.num_points,
self.oversample_ratio, self.importance_sample_ratio)
# shape (num_total_gts, h, w) -> (num_total_gts, num_points)
mask_point_targets = point_sample(
mask_targets.unsqueeze(1).float(), points_coords).squeeze(1)
# shape (num_queries, h, w) -> (num_queries, num_points)
mask_point_preds = point_sample(
mask_preds.unsqueeze(1), points_coords).squeeze(1)
# dice loss
loss_dice = self.loss_dice(
mask_point_preds, mask_point_targets, avg_factor=num_total_masks)
# mask loss
# shape (num_queries, num_points) -> (num_queries * num_points, )
mask_point_preds = mask_point_preds.reshape(-1)
# shape (num_total_gts, num_points) -> (num_total_gts * num_points, )
mask_point_targets = mask_point_targets.reshape(-1)
loss_mask = self.loss_mask(
mask_point_preds,
mask_point_targets,
avg_factor=num_total_masks * self.num_points)
return loss_cls, loss_mask, loss_dice
def _forward_head(self, decoder_out: Tensor, mask_feature: Tensor,
attn_mask_target_size: Tuple[int, int]) -> Tuple[Tensor]:
"""Forward for head part which is called after every decoder layer.
Args:
decoder_out (Tensor): in shape (batch_size, num_queries, c).
mask_feature (Tensor): in shape (batch_size, c, h, w).
attn_mask_target_size (tuple[int, int]): target attention
mask size.
Returns:
tuple: A tuple contain three elements.
- cls_pred (Tensor): Classification scores in shape \
(batch_size, num_queries, cls_out_channels). \
Note `cls_out_channels` should includes background.
- mask_pred (Tensor): Mask scores in shape \
(batch_size, num_queries,h, w).
- attn_mask (Tensor): Attention mask in shape \
(batch_size * num_heads, num_queries, h, w).
"""
decoder_out = self.transformer_decoder.post_norm(decoder_out) # layernorm
# shape (num_queries, batch_size, c)
cls_pred = self.cls_embed(decoder_out) # 类别预测
# shape (num_queries, batch_size, c)
mask_embed = self.mask_embed(decoder_out)
# shape (num_queries, batch_size, h, w) 相当于将query映射到区域
mask_pred = torch.einsum('bqc,bchw->bqhw', mask_embed, mask_feature)
attn_mask = F.interpolate(
mask_pred,
attn_mask_target_size,
mode='bilinear',
align_corners=False) # 下采样到16*16大小
# shape (num_queries, batch_size, h, w) ->
# (batch_size * num_head, num_queries, h, w) repeat为多头
attn_mask = attn_mask.flatten(2).unsqueeze(1).repeat(
(1, self.num_heads, 1, 1)).flatten(0, 1)
attn_mask = attn_mask.sigmoid() < 0.5 # 注意力mask的定义
attn_mask = attn_mask.detach()
return cls_pred, mask_pred, attn_mask
def forward(self, x: List[Tensor],
batch_data_samples: SampleList) -> Tuple[List[Tensor]]:
"""Forward function.
Args:
x (list[Tensor]): Multi scale Features from the
upstream network, each is a 4D-tensor.
batch_data_samples (List[:obj:`DetDataSample`]): The Data
Samples. It usually includes information such as
`gt_instance`, `gt_panoptic_seg` and `gt_sem_seg`.
Returns:
tuple[list[Tensor]]: A tuple contains two elements.
- cls_pred_list (list[Tensor)]: Classification logits \
for each decoder layer. Each is a 3D-tensor with shape \
(batch_size, num_queries, cls_out_channels). \
Note `cls_out_channels` should includes background.
- mask_pred_list (list[Tensor]): Mask logits for each \
decoder layer. Each with shape (batch_size, num_queries, \
h, w).
"""
batch_size = x[0].shape[0]
mask_features, multi_scale_memorys = self.pixel_decoder(x)
# multi_scale_memorys (from low resolution to high resolution)
decoder_inputs = []
decoder_positional_encodings = []
for i in range(self.num_transformer_feat_level):
decoder_input = self.decoder_input_projs[i](multi_scale_memorys[i]) # decoder的输入
# shape (batch_size, c, h, w) -> (batch_size, h*w, c)
decoder_input = decoder_input.flatten(2).permute(0, 2, 1)
level_embed = self.level_embed.weight[i].view(1, 1, -1) # 层级编码
decoder_input = decoder_input + level_embed
# shape (batch_size, c, h, w) -> (batch_size, h*w, c)
mask = decoder_input.new_zeros( # 初始化mask
(batch_size, ) + multi_scale_memorys[i].shape[-2:],
dtype=torch.bool)
decoder_positional_encoding = self.decoder_positional_encoding(
mask) # 位置编码维度与mask一致
decoder_positional_encoding = decoder_positional_encoding.flatten(
2).permute(0, 2, 1)
decoder_inputs.append(decoder_input)
decoder_positional_encodings.append(decoder_positional_encoding)
# shape (num_queries, c) -> (batch_size, num_queries, c)
query_feat = self.query_feat.weight.unsqueeze(0).repeat( # query的特征
(batch_size, 1, 1))
query_embed = self.query_embed.weight.unsqueeze(0).repeat( # query的位置编码
(batch_size, 1, 1))
cls_pred_list = []
mask_pred_list = []
# 获得类别预测,mask预测,注意力mask
cls_pred, mask_pred, attn_mask = self._forward_head(
query_feat, mask_features, multi_scale_memorys[0].shape[-2:])
cls_pred_list.append(cls_pred)
mask_pred_list.append(mask_pred)
for i in range(self.num_transformer_decoder_layers):
level_idx = i % self.num_transformer_feat_level
# if a mask is all True(all background), then set it all False.全为True,cross attn就失效了
mask_sum = (attn_mask.sum(-1) != attn_mask.shape[-1]).unsqueeze(-1)
attn_mask = attn_mask & mask_sum
# cross_attn + self_attn
layer = self.transformer_decoder.layers[i]
query_feat = layer( # cross attn
query=query_feat,
key=decoder_inputs[level_idx],
value=decoder_inputs[level_idx],
query_pos=query_embed,
key_pos=decoder_positional_encodings[level_idx],
cross_attn_mask=attn_mask,
query_key_padding_mask=None,
# here we do not apply masking on padded region
key_padding_mask=None)
cls_pred, mask_pred, attn_mask = self._forward_head( # 输出层,更新cls_pred,mask_pred,attn_mask
query_feat, mask_features, multi_scale_memorys[
(i + 1) % self.num_transformer_feat_level].shape[-2:])
cls_pred_list.append(cls_pred)
mask_pred_list.append(mask_pred)
return cls_pred_list, mask_pred_list5.标签分配策略
标签分配采用的是匈牙利二分图匹配,对于匈牙利匹配,首先需要构建一个维度为num_query*num_labels的成本矩阵,成本矩阵主要由3种损失构成,即分类损失、mask损失,diceloss损失,分类损失是query预测每个label概率的负值,mask损失是一个二元交叉熵损失,dice loss是重叠度损失。然后使用匈牙利匹配方法进行匹配。
class HungarianAssigner(BaseAssigner):
"""Computes one-to-one matching between predictions and ground truth.
This class computes an assignment between the targets and the predictions
based on the costs. The costs are weighted sum of some components.
For DETR the costs are weighted sum of classification cost, regression L1
cost and regression iou cost. The targets don't include the no_object, so
generally there are more predictions than targets. After the one-to-one
matching, the un-matched are treated as backgrounds. Thus each query
prediction will be assigned with `0` or a positive integer indicating the
ground truth index:
- 0: negative sample, no assigned gt
- positive integer: positive sample, index (1-based) of assigned gt
Args:
match_costs (:obj:`ConfigDict` or dict or \
List[Union[:obj:`ConfigDict`, dict]]): Match cost configs.
"""
def __init__(
self, match_costs: Union[List[Union[dict, ConfigDict]], dict,
ConfigDict]
) -> None:
if isinstance(match_costs, dict):
match_costs = [match_costs]
elif isinstance(match_costs, list):
assert len(match_costs) > 0, \
'match_costs must not be a empty list.'
self.match_costs = [
TASK_UTILS.build(match_cost) for match_cost in match_costs
]
def assign(self,
pred_instances: InstanceData,
gt_instances: InstanceData,
img_meta: Optional[dict] = None,
**kwargs) -> AssignResult:
"""Computes one-to-one matching based on the weighted costs.
This method assign each query prediction to a ground truth or
background. The `assigned_gt_inds` with -1 means don't care,
0 means negative sample, and positive number is the index (1-based)
of assigned gt.
The assignment is done in the following steps, the order matters.
1. assign every prediction to -1
2. compute the weighted costs
3. do Hungarian matching on CPU based on the costs
4. assign all to 0 (background) first, then for each matched pair
between predictions and gts, treat this prediction as foreground
and assign the corresponding gt index (plus 1) to it.
Args:
pred_instances (:obj:`InstanceData`): Instances of model
predictions. It includes ``priors``, and the priors can
be anchors or points, or the bboxes predicted by the
previous stage, has shape (n, 4). The bboxes predicted by
the current model or stage will be named ``bboxes``,
``labels``, and ``scores``, the same as the ``InstanceData``
in other places. It may includes ``masks``, with shape
(n, h, w) or (n, l).
gt_instances (:obj:`InstanceData`): Ground truth of instance
annotations. It usually includes ``bboxes``, with shape (k, 4),
``labels``, with shape (k, ) and ``masks``, with shape
(k, h, w) or (k, l).
img_meta (dict): Image information.
Returns:
:obj:`AssignResult`: The assigned result.
"""
assert isinstance(gt_instances.labels, Tensor)
num_gts, num_preds = len(gt_instances), len(pred_instances)
gt_labels = gt_instances.labels
device = gt_labels.device
# 1. assign -1 by default 初始化为-1
assigned_gt_inds = torch.full((num_preds, ),
-1,
dtype=torch.long,
device=device)
assigned_labels = torch.full((num_preds, ),
-1,
dtype=torch.long,
device=device)
if num_gts == 0 or num_preds == 0:
# No ground truth or boxes, return empty assignment
if num_gts == 0:
# No ground truth, assign all to background
assigned_gt_inds[:] = 0
return AssignResult(
num_gts=num_gts,
gt_inds=assigned_gt_inds,
max_overlaps=None,
labels=assigned_labels)
# 2. compute weighted cost
cost_list = [] # 分类损失是query预测每个label概率的负值
for match_cost in self.match_costs: # 分类损失,mask损失,diceloss(重合比例)
cost = match_cost(
pred_instances=pred_instances,
gt_instances=gt_instances,
img_meta=img_meta)
cost_list.append(cost)
cost = torch.stack(cost_list).sum(dim=0)
# 3. do Hungarian matching on CPU using linear_sum_assignment
cost = cost.detach().cpu()
if linear_sum_assignment is None:
raise ImportError('Please run "pip install scipy" '
'to install scipy first.')
matched_row_inds, matched_col_inds = linear_sum_assignment(cost) # num_query*num_lables的cost矩阵做二分图最大匹配
matched_row_inds = torch.from_numpy(matched_row_inds).to(device)
matched_col_inds = torch.from_numpy(matched_col_inds).to(device)
# 4. assign backgrounds and foregrounds
# assign all indices to backgrounds first
assigned_gt_inds[:] = 0
# assign foregrounds based on matching results 匹配的标签
assigned_gt_inds[matched_row_inds] = matched_col_inds + 1
assigned_labels[matched_row_inds] = gt_labels[matched_col_inds]
return AssignResult( # 字典
num_gts=num_gts,
gt_inds=assigned_gt_inds,
max_overlaps=None,
labels=assigned_labels)整体代码:
class MaskFormerHead(AnchorFreeHead):
"""Implements the MaskFormer head.
See `Per-Pixel Classification is Not All You Need for Semantic
Segmentation <https://arxiv.org/pdf/2107.06278>`_ for details.
Args:
in_channels (list[int]): Number of channels in the input feature map.
feat_channels (int): Number of channels for feature.
out_channels (int): Number of channels for output.
num_things_classes (int): Number of things.
num_stuff_classes (int): Number of stuff.
num_queries (int): Number of query in Transformer.
pixel_decoder (:obj:`ConfigDict` or dict): Config for pixel
decoder.
enforce_decoder_input_project (bool): Whether to add a layer
to change the embed_dim of transformer encoder in pixel decoder to
the embed_dim of transformer decoder. Defaults to False.
transformer_decoder (:obj:`ConfigDict` or dict): Config for
transformer decoder.
positional_encoding (:obj:`ConfigDict` or dict): Config for
transformer decoder position encoding.
loss_cls (:obj:`ConfigDict` or dict): Config of the classification
loss. Defaults to `CrossEntropyLoss`.
loss_mask (:obj:`ConfigDict` or dict): Config of the mask loss.
Defaults to `FocalLoss`.
loss_dice (:obj:`ConfigDict` or dict): Config of the dice loss.
Defaults to `DiceLoss`.
train_cfg (:obj:`ConfigDict` or dict, optional): Training config of
MaskFormer head.
test_cfg (:obj:`ConfigDict` or dict, optional): Testing config of
MaskFormer head.
init_cfg (:obj:`ConfigDict` or dict or list[:obj:`ConfigDict` or \
dict], optional): Initialization config dict. Defaults to None.
"""
def __init__(self,
in_channels: List[int],
feat_channels: int,
out_channels: int,
num_things_classes: int = 80,
num_stuff_classes: int = 53,
num_queries: int = 100,
pixel_decoder: ConfigType = ...,
enforce_decoder_input_project: bool = False,
transformer_decoder: ConfigType = ...,
positional_encoding: ConfigType = dict(
num_feats=128, normalize=True),
loss_cls: ConfigType = dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=1.0,
class_weight=[1.0] * 133 + [0.1]),
loss_mask: ConfigType = dict(
type='FocalLoss',
use_sigmoid=True,
gamma=2.0,
alpha=0.25,
loss_weight=20.0),
loss_dice: ConfigType = dict(
type='DiceLoss',
use_sigmoid=True,
activate=True,
naive_dice=True,
loss_weight=1.0),
train_cfg: OptConfigType = None,
test_cfg: OptConfigType = None,
init_cfg: OptMultiConfig = None,
**kwargs) -> None:
super(AnchorFreeHead, self).__init__(init_cfg=init_cfg)
self.num_things_classes = num_things_classes
self.num_stuff_classes = num_stuff_classes
self.num_classes = self.num_things_classes + self.num_stuff_classes
self.num_queries = num_queries
pixel_decoder.update(
in_channels=in_channels,
feat_channels=feat_channels,
out_channels=out_channels)
self.pixel_decoder = MODELS.build(pixel_decoder)
self.transformer_decoder = DetrTransformerDecoder(
**transformer_decoder)
self.decoder_embed_dims = self.transformer_decoder.embed_dims
if type(self.pixel_decoder) == PixelDecoder and (
self.decoder_embed_dims != in_channels[-1]
or enforce_decoder_input_project):
self.decoder_input_proj = Conv2d(
in_channels[-1], self.decoder_embed_dims, kernel_size=1)
else:
self.decoder_input_proj = nn.Identity()
self.decoder_pe = SinePositionalEncoding(**positional_encoding)
self.query_embed = nn.Embedding(self.num_queries, out_channels)
self.cls_embed = nn.Linear(feat_channels, self.num_classes + 1)
self.mask_embed = nn.Sequential(
nn.Linear(feat_channels, feat_channels), nn.ReLU(inplace=True),
nn.Linear(feat_channels, feat_channels), nn.ReLU(inplace=True),
nn.Linear(feat_channels, out_channels))
self.test_cfg = test_cfg
self.train_cfg = train_cfg
if train_cfg:
self.assigner = TASK_UTILS.build(train_cfg['assigner'])
self.sampler = TASK_UTILS.build(
train_cfg['sampler'], default_args=dict(context=self))
self.class_weight = loss_cls.class_weight
self.loss_cls = MODELS.build(loss_cls)
self.loss_mask = MODELS.build(loss_mask)
self.loss_dice = MODELS.build(loss_dice)
def init_weights(self) -> None:
if isinstance(self.decoder_input_proj, Conv2d):
caffe2_xavier_init(self.decoder_input_proj, bias=0)
self.pixel_decoder.init_weights()
for p in self.transformer_decoder.parameters():
if p.dim() > 1:
nn.init.xavier_uniform_(p)
def preprocess_gt(
self, batch_gt_instances: InstanceList,
batch_gt_semantic_segs: List[Optional[PixelData]]) -> InstanceList:
"""Preprocess the ground truth for all images.
Args:
batch_gt_instances (list[:obj:`InstanceData`]): Batch of
gt_instance. It usually includes ``labels``, each is
ground truth labels of each bbox, with shape (num_gts, )
and ``masks``, each is ground truth masks of each instances
of a image, shape (num_gts, h, w).
gt_semantic_seg (list[Optional[PixelData]]): Ground truth of
semantic segmentation, each with the shape (1, h, w).
[0, num_thing_class - 1] means things,
[num_thing_class, num_class-1] means stuff,
255 means VOID. It's None when training instance segmentation.
Returns:
list[obj:`InstanceData`]: each contains the following keys
- labels (Tensor): Ground truth class indices\
for a image, with shape (n, ), n is the sum of\
number of stuff type and number of instance in a image.
- masks (Tensor): Ground truth mask for a\
image, with shape (n, h, w).
"""
num_things_list = [self.num_things_classes] * len(batch_gt_instances)
num_stuff_list = [self.num_stuff_classes] * len(batch_gt_instances)
gt_labels_list = [
gt_instances['labels'] for gt_instances in batch_gt_instances
]
gt_masks_list = [
gt_instances['masks'] for gt_instances in batch_gt_instances
]
gt_semantic_segs = [
None if gt_semantic_seg is None else gt_semantic_seg.sem_seg
for gt_semantic_seg in batch_gt_semantic_segs
]
targets = multi_apply(preprocess_panoptic_gt, gt_labels_list,
gt_masks_list, gt_semantic_segs, num_things_list,
num_stuff_list)
labels, masks = targets
batch_gt_instances = [
InstanceData(labels=label, masks=mask)
for label, mask in zip(labels, masks)
]
return batch_gt_instances
def get_targets(
self,
cls_scores_list: List[Tensor],
mask_preds_list: List[Tensor],
batch_gt_instances: InstanceList,
batch_img_metas: List[dict],
return_sampling_results: bool = False
) -> Tuple[List[Union[Tensor, int]]]:
"""Compute classification and mask targets for all images for a decoder
layer.
Args:
cls_scores_list (list[Tensor]): Mask score logits from a single
decoder layer for all images. Each with shape (num_queries,
cls_out_channels).
mask_preds_list (list[Tensor]): Mask logits from a single decoder
layer for all images. Each with shape (num_queries, h, w).
batch_gt_instances (list[obj:`InstanceData`]): each contains
``labels`` and ``masks``.
batch_img_metas (list[dict]): List of image meta information.
return_sampling_results (bool): Whether to return the sampling
results. Defaults to False.
Returns:
tuple: a tuple containing the following targets.
- labels_list (list[Tensor]): Labels of all images.\
Each with shape (num_queries, ).
- label_weights_list (list[Tensor]): Label weights\
of all images. Each with shape (num_queries, ).
- mask_targets_list (list[Tensor]): Mask targets of\
all images. Each with shape (num_queries, h, w).
- mask_weights_list (list[Tensor]): Mask weights of\
all images. Each with shape (num_queries, ).
- avg_factor (int): Average factor that is used to average\
the loss. When using sampling method, avg_factor is
usually the sum of positive and negative priors. When
using `MaskPseudoSampler`, `avg_factor` is usually equal
to the number of positive priors.
additional_returns: This function enables user-defined returns from
`self._get_targets_single`. These returns are currently refined
to properties at each feature map (i.e. having HxW dimension).
The results will be concatenated after the end.
"""
results = multi_apply(self._get_targets_single, cls_scores_list,
mask_preds_list, batch_gt_instances,
batch_img_metas)
(labels_list, label_weights_list, mask_targets_list, mask_weights_list,
pos_inds_list, neg_inds_list, sampling_results_list) = results[:7]
rest_results = list(results[7:])
avg_factor = sum(
[results.avg_factor for results in sampling_results_list])
res = (labels_list, label_weights_list, mask_targets_list,
mask_weights_list, avg_factor)
if return_sampling_results:
res = res + (sampling_results_list)
return res + tuple(rest_results)
def _get_targets_single(self, cls_score: Tensor, mask_pred: Tensor,
gt_instances: InstanceData,
img_meta: dict) -> Tuple[Tensor]:
"""Compute classification and mask targets for one image.
Args:
cls_score (Tensor): Mask score logits from a single decoder layer
for one image. Shape (num_queries, cls_out_channels).
mask_pred (Tensor): Mask logits for a single decoder layer for one
image. Shape (num_queries, h, w).
gt_instances (:obj:`InstanceData`): It contains ``labels`` and
``masks``.
img_meta (dict): Image informtation.
Returns:
tuple: a tuple containing the following for one image.
- labels (Tensor): Labels of each image.
shape (num_queries, ).
- label_weights (Tensor): Label weights of each image.
shape (num_queries, ).
- mask_targets (Tensor): Mask targets of each image.
shape (num_queries, h, w).
- mask_weights (Tensor): Mask weights of each image.
shape (num_queries, ).
- pos_inds (Tensor): Sampled positive indices for each image.
- neg_inds (Tensor): Sampled negative indices for each image.
- sampling_result (:obj:`SamplingResult`): Sampling results.
"""
gt_masks = gt_instances.masks
gt_labels = gt_instances.labels
target_shape = mask_pred.shape[-2:]
if gt_masks.shape[0] > 0:
gt_masks_downsampled = F.interpolate(
gt_masks.unsqueeze(1).float(), target_shape,
mode='nearest').squeeze(1).long()
else:
gt_masks_downsampled = gt_masks
pred_instances = InstanceData(scores=cls_score, masks=mask_pred)
downsampled_gt_instances = InstanceData(
labels=gt_labels, masks=gt_masks_downsampled)
# assign and sample
assign_result = self.assigner.assign( # 标签分配
pred_instances=pred_instances,
gt_instances=downsampled_gt_instances,
img_meta=img_meta)
sampling_result = self.sampler.sample(
assign_result=assign_result,
pred_instances=pred_instances,
gt_instances=gt_instances)
pos_inds = sampling_result.pos_inds
neg_inds = sampling_result.neg_inds
# label target
labels = gt_labels.new_full((self.num_queries, ),
self.num_classes,
dtype=torch.long)
labels[pos_inds] = gt_labels[sampling_result.pos_assigned_gt_inds]
label_weights = gt_labels.new_ones(self.num_queries)
# mask target
mask_targets = gt_masks[sampling_result.pos_assigned_gt_inds]
mask_weights = mask_pred.new_zeros((self.num_queries, ))
mask_weights[pos_inds] = 1.0
return (labels, label_weights, mask_targets, mask_weights, pos_inds,
neg_inds, sampling_result)
def loss_by_feat(self, all_cls_scores: Tensor, all_mask_preds: Tensor,
batch_gt_instances: List[InstanceData],
batch_img_metas: List[dict]) -> Dict[str, Tensor]:
"""Loss function.
Args:
all_cls_scores (Tensor): Classification scores for all decoder
layers with shape (num_decoder, batch_size, num_queries,
cls_out_channels). Note `cls_out_channels` should includes
background.
all_mask_preds (Tensor): Mask scores for all decoder layers with
shape (num_decoder, batch_size, num_queries, h, w).
batch_gt_instances (list[obj:`InstanceData`]): each contains
``labels`` and ``masks``.
batch_img_metas (list[dict]): List of image meta information.
Returns:
dict[str, Tensor]: A dictionary of loss components.
"""
num_dec_layers = len(all_cls_scores)
batch_gt_instances_list = [
batch_gt_instances for _ in range(num_dec_layers)
]
img_metas_list = [batch_img_metas for _ in range(num_dec_layers)] # 每一层做处理
losses_cls, losses_mask, losses_dice = multi_apply( # 计算损失
self._loss_by_feat_single, all_cls_scores, all_mask_preds,
batch_gt_instances_list, img_metas_list)
loss_dict = dict()
# loss from the last decoder layer
loss_dict['loss_cls'] = losses_cls[-1]
loss_dict['loss_mask'] = losses_mask[-1]
loss_dict['loss_dice'] = losses_dice[-1]
# loss from other decoder layers
num_dec_layer = 0
for loss_cls_i, loss_mask_i, loss_dice_i in zip(
losses_cls[:-1], losses_mask[:-1], losses_dice[:-1]):
loss_dict[f'd{num_dec_layer}.loss_cls'] = loss_cls_i
loss_dict[f'd{num_dec_layer}.loss_mask'] = loss_mask_i
loss_dict[f'd{num_dec_layer}.loss_dice'] = loss_dice_i
num_dec_layer += 1
return loss_dict
def _loss_by_feat_single(self, cls_scores: Tensor, mask_preds: Tensor,
batch_gt_instances: List[InstanceData],
batch_img_metas: List[dict]) -> Tuple[Tensor]:
"""Loss function for outputs from a single decoder layer.
Args:
cls_scores (Tensor): Mask score logits from a single decoder layer
for all images. Shape (batch_size, num_queries,
cls_out_channels). Note `cls_out_channels` should includes
background.
mask_preds (Tensor): Mask logits for a pixel decoder for all
images. Shape (batch_size, num_queries, h, w).
batch_gt_instances (list[obj:`InstanceData`]): each contains
``labels`` and ``masks``.
batch_img_metas (list[dict]): List of image meta information.
Returns:
tuple[Tensor]: Loss components for outputs from a single decoder\
layer.
"""
num_imgs = cls_scores.size(0)
cls_scores_list = [cls_scores[i] for i in range(num_imgs)] # 取出每一个cls score和mask preds
mask_preds_list = [mask_preds[i] for i in range(num_imgs)]
# 分配标签
(labels_list, label_weights_list, mask_targets_list, mask_weights_list,
avg_factor) = self.get_targets(cls_scores_list, mask_preds_list,
batch_gt_instances, batch_img_metas)
# shape (batch_size, num_queries)
labels = torch.stack(labels_list, dim=0)
# shape (batch_size, num_queries)
label_weights = torch.stack(label_weights_list, dim=0)
# shape (num_total_gts, h, w)
mask_targets = torch.cat(mask_targets_list, dim=0)
# shape (batch_size, num_queries)
mask_weights = torch.stack(mask_weights_list, dim=0)
# classfication loss 分配标签后实际计算损失
# shape (batch_size * num_queries, )
cls_scores = cls_scores.flatten(0, 1)
labels = labels.flatten(0, 1)
label_weights = label_weights.flatten(0, 1)
class_weight = cls_scores.new_tensor(self.class_weight)
loss_cls = self.loss_cls(
cls_scores,
labels,
label_weights,
avg_factor=class_weight[labels].sum())
num_total_masks = reduce_mean(cls_scores.new_tensor([avg_factor]))
num_total_masks = max(num_total_masks, 1)
# extract positive ones
# shape (batch_size, num_queries, h, w) -> (num_total_gts, h, w)
mask_preds = mask_preds[mask_weights > 0] # 取出有实例的位置
target_shape = mask_targets.shape[-2:]
if mask_targets.shape[0] == 0:
# zero match
loss_dice = mask_preds.sum()
loss_mask = mask_preds.sum()
return loss_cls, loss_mask, loss_dice
# upsample to shape of target
# shape (num_total_gts, h, w)
mask_preds = F.interpolate(
mask_preds.unsqueeze(1),
target_shape,
mode='bilinear',
align_corners=False).squeeze(1)
# dice loss
loss_dice = self.loss_dice(
mask_preds, mask_targets, avg_factor=num_total_masks)
# mask loss
# FocalLoss support input of shape (n, num_class)
h, w = mask_preds.shape[-2:]
# shape (num_total_gts, h, w) -> (num_total_gts * h * w, 1)
mask_preds = mask_preds.reshape(-1, 1)
# shape (num_total_gts, h, w) -> (num_total_gts * h * w)
mask_targets = mask_targets.reshape(-1)
# target is (1 - mask_targets) !!!
loss_mask = self.loss_mask(
mask_preds, 1 - mask_targets, avg_factor=num_total_masks * h * w)
return loss_cls, loss_mask, loss_dice
def forward(self, x: Tuple[Tensor],
batch_data_samples: SampleList) -> Tuple[Tensor]:
"""Forward function.
Args:
x (tuple[Tensor]): Features from the upstream network, each
is a 4D-tensor.
batch_data_samples (List[:obj:`DetDataSample`]): The Data
Samples. It usually includes information such as
`gt_instance`, `gt_panoptic_seg` and `gt_sem_seg`.
Returns:
tuple[Tensor]: a tuple contains two elements.
- all_cls_scores (Tensor): Classification scores for each\
scale level. Each is a 4D-tensor with shape\
(num_decoder, batch_size, num_queries, cls_out_channels).\
Note `cls_out_channels` should includes background.
- all_mask_preds (Tensor): Mask scores for each decoder\
layer. Each with shape (num_decoder, batch_size,\
num_queries, h, w).
"""
batch_img_metas = [
data_sample.metainfo for data_sample in batch_data_samples
]
batch_size = x[0].shape[0]
input_img_h, input_img_w = batch_img_metas[0]['batch_input_shape']
padding_mask = x[-1].new_ones((batch_size, input_img_h, input_img_w),
dtype=torch.float32)
for i in range(batch_size):
img_h, img_w = batch_img_metas[i]['img_shape']
padding_mask[i, :img_h, :img_w] = 0
padding_mask = F.interpolate(
padding_mask.unsqueeze(1), size=x[-1].shape[-2:],
mode='nearest').to(torch.bool).squeeze(1)
# when backbone is swin, memory is output of last stage of swin.
# when backbone is r50, memory is output of tranformer encoder.
mask_features, memory = self.pixel_decoder(x, batch_img_metas)
pos_embed = self.decoder_pe(padding_mask)
memory = self.decoder_input_proj(memory)
# shape (batch_size, c, h, w) -> (batch_size, h*w, c)
memory = memory.flatten(2).permute(0, 2, 1)
pos_embed = pos_embed.flatten(2).permute(0, 2, 1)
# shape (batch_size, h * w)
padding_mask = padding_mask.flatten(1)
# shape = (num_queries, embed_dims)
query_embed = self.query_embed.weight
# shape = (batch_size, num_queries, embed_dims)
query_embed = query_embed.unsqueeze(0).repeat(batch_size, 1, 1)
target = torch.zeros_like(query_embed)
# shape (num_decoder, num_queries, batch_size, embed_dims)
out_dec = self.transformer_decoder(
query=target,
key=memory,
value=memory,
query_pos=query_embed,
key_pos=pos_embed,
key_padding_mask=padding_mask)
# cls_scores
all_cls_scores = self.cls_embed(out_dec)
# mask_preds
mask_embed = self.mask_embed(out_dec)
all_mask_preds = torch.einsum('lbqc,bchw->lbqhw', mask_embed,
mask_features)
return all_cls_scores, all_mask_preds
def loss(
self,
x: Tuple[Tensor],
batch_data_samples: SampleList,
) -> Dict[str, Tensor]:
"""Perform forward propagation and loss calculation of the panoptic
head on the features of the upstream network.
Args:
x (tuple[Tensor]): Multi-level features from the upstream
network, each is a 4D-tensor.
batch_data_samples (List[:obj:`DetDataSample`]): The Data
Samples. It usually includes information such as
`gt_instance`, `gt_panoptic_seg` and `gt_sem_seg`.
Returns:
dict[str, Tensor]: a dictionary of loss components
"""
batch_img_metas = []
batch_gt_instances = []
batch_gt_semantic_segs = []
for data_sample in batch_data_samples:
batch_img_metas.append(data_sample.metainfo)
batch_gt_instances.append(data_sample.gt_instances)
if 'gt_sem_seg' in data_sample:
batch_gt_semantic_segs.append(data_sample.gt_sem_seg)
else:
batch_gt_semantic_segs.append(None)
# forward
all_cls_scores, all_mask_preds = self(x, batch_data_samples)
# preprocess ground truth
batch_gt_instances = self.preprocess_gt(batch_gt_instances,
batch_gt_semantic_segs)
# loss
losses = self.loss_by_feat(all_cls_scores, all_mask_preds,
batch_gt_instances, batch_img_metas)
return losses
def predict(self, x: Tuple[Tensor],
batch_data_samples: SampleList) -> Tuple[Tensor]:
"""Test without augmentaton.
Args:
x (tuple[Tensor]): Multi-level features from the
upstream network, each is a 4D-tensor.
batch_data_samples (List[:obj:`DetDataSample`]): The Data
Samples. It usually includes information such as
`gt_instance`, `gt_panoptic_seg` and `gt_sem_seg`.
Returns:
tuple[Tensor]: A tuple contains two tensors.
- mask_cls_results (Tensor): Mask classification logits,\
shape (batch_size, num_queries, cls_out_channels).
Note `cls_out_channels` should includes background.
- mask_pred_results (Tensor): Mask logits, shape \
(batch_size, num_queries, h, w).
"""
batch_img_metas = [
data_sample.metainfo for data_sample in batch_data_samples
]
all_cls_scores, all_mask_preds = self(x, batch_data_samples)
mask_cls_results = all_cls_scores[-1]
mask_pred_results = all_mask_preds[-1]
# upsample masks
img_shape = batch_img_metas[0]['batch_input_shape']
mask_pred_results = F.interpolate(
mask_pred_results,
size=(img_shape[0], img_shape[1]),
mode='bilinear',
align_corners=False)
return mask_cls_results, mask_pred_results