这一模块的思路和前面的语言控制模块很相似,差别只是调用TCP 去控制
废话少说,放码过来
增添/修改代码
socket_interface.c
#include <pthread.h>
#include "socket_interface.h"
#include "control.h"
#include "socket.h"
#include "mq_queue.h"
#include "global.h"
#include <netinet/tcp.h> // 设置 tcp 心跳 的参数
static int s_fd = -1;
static int tcpsocket_init(void)
{
s_fd = socket_init(IPADDR,IPPORT);
//return s_fd;
return -1;
}
static void tcpsocket_final(void)
{
close(s_fd);
s_fd = -1;
}
static void* tcpsocket_get(void *arg)
{
int c_fd = -1;
unsigned char buffer[BUF_SIZE];
int ret = -1;
struct sockaddr_in c_addr;
mqd_t mqd = -1;
ctrl_info_t * ctrl_info = NULL;
int keepalive = 1; // 开启TCP_KEEPALIVE选项
int keepidle = 10; // 设置探测时间间隔为10秒
int keepinterval = 5; // 设置探测包发送间隔为5秒
int keepcount = 3; // 设置探测包发送次数为3次
pthread_detach(pthread_self()); // 和主线程(他的父线程)分离
printf("%s|%s|%d s_fd = %d\n", __FILE__, __func__, __LINE__, s_fd);
if(-1 == s_fd) // 判断是否初始化成功
{
s_fd = tcpsocket_init();
if(-1 == s_fd)
{
printf("tcpsocket_init error\n");
pthread_exit(0);
}
}
if(NULL != arg)
ctrl_info = (ctrl_info_t*)arg;
if(NULL != ctrl_info)
mqd = ctrl_info->mqd;
if((mqd_t)-1 == mqd)
{
pthread_exit(0);
}
memset(&c_addr, 0, sizeof(struct sockaddr_in));
int clen = sizeof(struct sockaddr_in);
printf("%s thread start\n", __func__);
while (1) // 一直等待接收
{
c_fd = accept(s_fd, (struct sockaddr *)&c_addr, &clen); // 获得新的客户端 描述符
if (c_fd == -1)
{
continue;
}
ret = setsockopt(c_fd, SOL_SOCKET, SO_KEEPALIVE, (void *)&keepalive,sizeof(keepalive));
if(-1 == ret){
perror("setsockopt");
break;
}
ret = setsockopt(c_fd, IPPROTO_TCP, TCP_KEEPIDLE, (void *)&keepidle, sizeof(keepidle));
if(-1 == ret){
perror("setsockopt");
break;
}
ret = setsockopt(c_fd, IPPROTO_TCP, TCP_KEEPINTVL, &keepinterval,
sizeof(keepinterval));
if(-1 == ret){
perror("setsockopt");
break;
}
ret = setsockopt(c_fd, IPPROTO_TCP, TCP_KEEPCNT, &keepcount,
sizeof(keepcount));
if(-1 == ret){
perror("setsockopt");
break;
}
// 打印调试信息
printf("%s | %s | %d: Access a connection from %s:%d\n", __FILE__, __func__, __LINE__, inet_ntoa(c_addr.sin_addr), ntohs(c_addr.sin_port));
while (1)
{
memset(buffer, 0, BUF_SIZE);
ret = recv(c_fd, buffer, BUF_SIZE, 0); // 等待接收
// 将接收到数据打印出来
printf("%s|%s|%d, 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);
if (ret > 0)
{
if(buffer[0] == 0xAA && buffer[1] == 0x55
&&buffer[4]==0x55 && buffer[5]==0xAA)
{
printf("%s|%s|%d, send: 0x%x,0x%x,0x%x,0x%x,0x%x,0x%x\n",__FILE__,__func__,__LINE__,buffer[0],buffer[1],buffer[2],buffer[3],buffer[4],buffer[5]);
send_msg(mqd,buffer,ret);
}
}
else if (0 == ret || -1 == ret) // 没读到,or 读到空
{
break;
}
}
}
pthread_exit(0);
}
struct control tcpsocket_control ={
.control_name = "tcpsocket",
.init = tcpsocket_init,
.final = tcpsocket_final,
.get = tcpsocket_get,
.set = NULL, //不需要实现 设置
.next = NULL
};
struct control *add_tcpsocket_to_ctrl_list(struct control *phead)
{
//头插法实现 添加链表节点
struct control *pnew = NULL;
if(NULL == phead)
{
phead = &tcpsocket_control; // 直接传入我们的 voice_control
}
else// 头结点非空 - 链表有数据
{
tcpsocket_control.next = phead; //把新的节点的next指向头结点
phead = &tcpsocket_control; // 让心节点成为头结点
}
return phead;
};
socket_interface.h
#ifndef ___SOCKET_INTERFACE_H___
#define ___SOCKET_INTERFACE_H___
#include "control.h"
struct control *add_tcpsocket_to_ctrl_list(struct control *phead);
#endif修改的main.c
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include "control.h"
#include "mq_queue.h"
#include "voice_interface.h"
#include "socket_interface.h"
#include "global.h"
// msg_queue_create
int main() {
pthread_t thread_id;
struct control *control_phead = NULL;
struct control *pointer = NULL;
ctrl_info_t *ctrl_info = NULL;
ctrl_info = (ctrl_info_t *)malloc(sizeof(ctrl_info_t));
ctrl_info->ctrl_phead = NULL;
ctrl_info->mqd = -1;
int node_num = 0; // 统计节点数
// 创建消息队列
ctrl_info->mqd = msg_queue_create();
if(-1 == ctrl_info->mqd)// 创建消息队列失败
{
printf("%s|%s|%d, mqd= %d\n",__FILE__,__func__,__LINE__,ctrl_info->mqd);
return -1;
}
ctrl_info->ctrl_phead = add_voice_to_ctrl_list(ctrl_info->ctrl_phead);
ctrl_info->ctrl_phead = add_tcpsocket_to_ctrl_list(ctrl_info->ctrl_phead);
//ctrl_info->ctrl_phead = add_fire_to_ctrl_list(ctrl_info->ctrl_phead);
pointer = ctrl_info->ctrl_phead;
while(NULL!=pointer) // 对所有控制结构体初始化,并且统计节点数
{
if(NULL != pointer->init)
{
printf("%s|%s|%d control_name = %s\n",__FILE__,__func__,__LINE__,pointer->control_name);
pointer->init();
}
pointer = pointer->next;
node_num++; // 统计节点数
}
// 根据节点的总数 --> 创建对应数目的线程
pthread_t *tid = (pthread_t *)malloc(sizeof(int) *node_num);
pointer = ctrl_info->ctrl_phead;
for(int i=0;i<node_num;++i)//遍历所有节点
{
if(NULL != pointer->get){
printf("%s|%s|%d control_name = %s\n",__FILE__,__func__,__LINE__,pointer->control_name);
pthread_create(&tid[i],NULL,(void *)pointer->get,(void *)ctrl_info); // 传入这个结构体参数,方便同时调用多组线程里面的API
}
pointer = pointer->next;
}
for(int i=0;i<node_num;++i)
{
pthread_join(tid[i],NULL);
}
for(int i=0;i<node_num;++i)
{
if(NULL != pointer->final)
pointer->final(); // 接打开的使用接口关闭
pointer = pointer->next;
}
msq_queue_final(ctrl_info->mqd);
}编译执行:
编译:
make
发送到arm-64平台
scp ./obj/smarthome orangepi@192.168.1.11:/home/orangepi
执行:
sudo -E ./smarthome
/遇到如下报错 -- 解决:
scp: /home/orangepi/smarthome: Text file busy
kill -9 进程即可
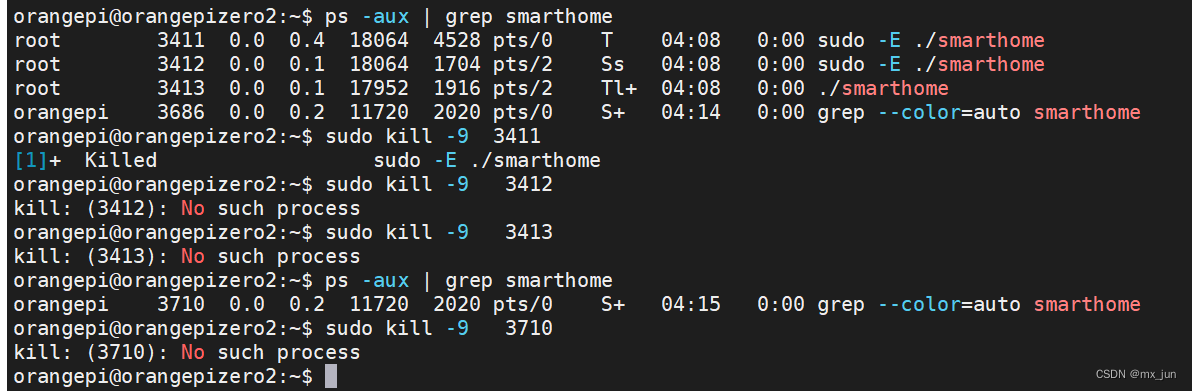

kill之后成功了
bind: Address already in use
要解决这个问题,您可以尝试以下步骤:
-
查找并关闭现有进程:使用
netstat、lsof或ss命令来查找正在监听该端口的进程,并关闭它。sudo netstat -tulnp | grep [端口号] # 或者 sudo lsof -i :[端口号] # 或者 sudo ss -tulnp | grep [端口号]找到进程ID(PID)后,使用
kill -9命令来结束该进程。 -
重启计算机:如果无法确定哪个进程正在使用端口,或者无法结束该进程,您可以考虑重启计算机。
-
使用不同的端口:如果您只是想要快速测试您的应用程序,并且不关心特定的端口号,您可以尝试使用另一个端口。
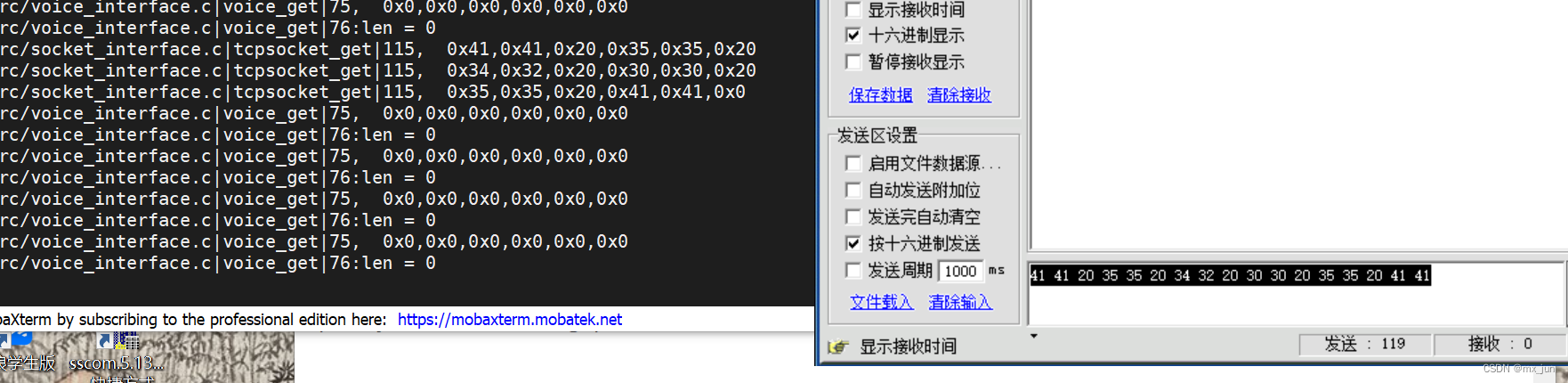
TCP验证:
(注意发送格式 16进制)

否则你发送的数据很可能变成这样