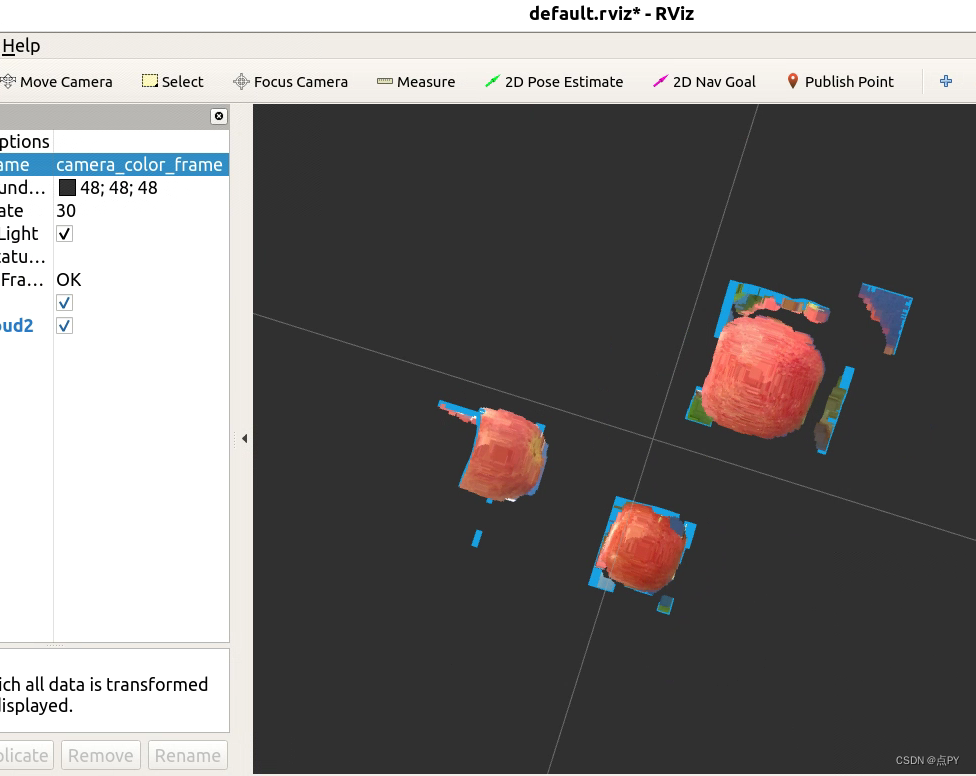
基于2D Object Detection的目标几何中心三维位置估计(C++)
news2026/2/13 20:43:09
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/166431.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
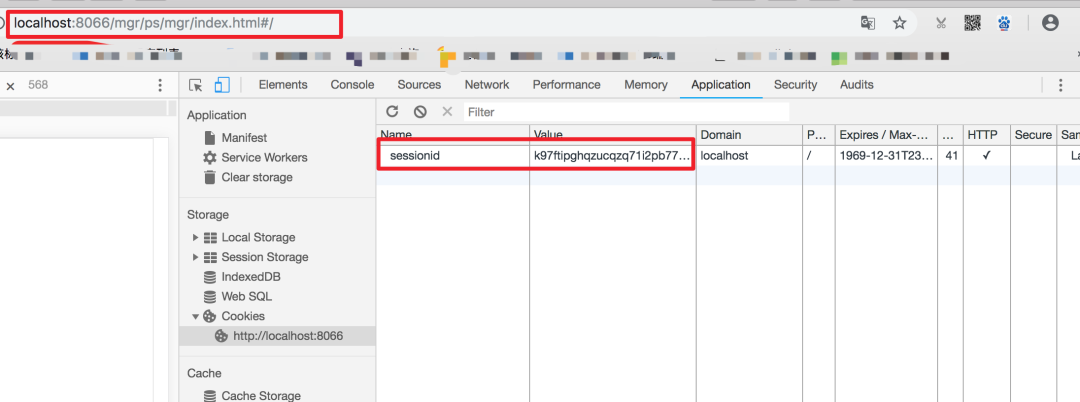
selenium通过cookie跳过登录验证码实现登录
一般做ui自动化面对验证码一直是一个问题,在网上页百度了一些关于验证码的问题,有通过把验证码提取下来通过pytesser,tesseract,OCR 等库处理,但是这些比较麻烦。 还是因为本人比较渣看不懂,后来想到了weba…

selenium页面元素定位、操作
1 打开 / 关闭浏览器2 打开URL链接3 定位单个页面元素3.1 通过ID定位3.2 通过name定位3.3 通过classname定位3.4 通过CSS定位3.5 通过链接的文本信息定位3.6 通过XPath定位3.6.1 xpath语法3.6.2 实例4 操作4.1 基本操作4.2 切换窗口、框架5 封装selenium的基本操作6 判断元素是…

Express做后端服务详细步骤,从零到一
文章目录一、全局安装脚手架二、生成项目1.生成项目2.目录结构介绍3.拓展:配置文件热更新(避免改一次文件重启一次服务)步骤1:安装nodemon步骤2:创建nodemon.json文件步骤3:更改启动命令步骤4:上…

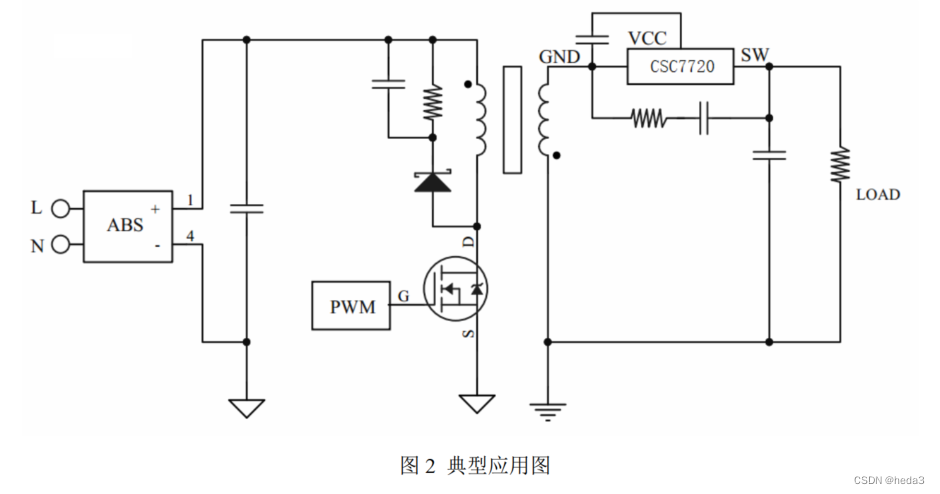
如何准确测试相位噪声
相位噪声是表征CW信号频谱纯度的非常重要的参数,衡量了信号频率的短期稳定度。通常所说的相噪为单边带(SSB) 相位噪声,相噪的好坏对于系统的性能至关重要!
对于终端通信而言,如果接收机LO的相噪较差,且在信道附近存在…
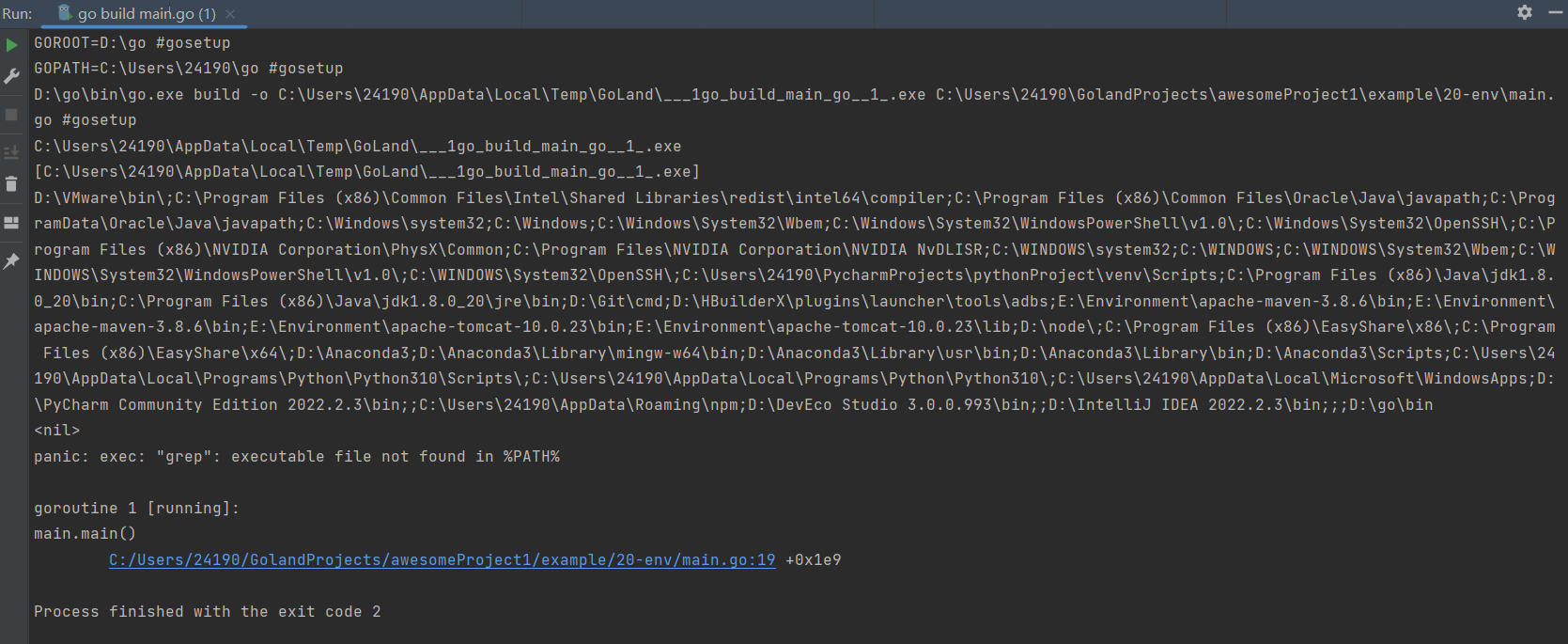
GO语言开篇-Go语言急速入门(基础知识点)| 青训营笔记
文章目录一.GO语言应用场景1.1 前言1.2 什么是GO语言1.3 仅仅10行完成高并发的服务器二.入门2.1 基础语法-HelloWorld2.2 基础语法-变量类型2.2.1 变量2.2.2 if else2.2.3 循环2.2.4 switch2.2.5 数组2.2.6 切片2.2.7 map2.2.8 range2.2.9 函数2.2.10 指针2.2.11 结构体2.2.12 …
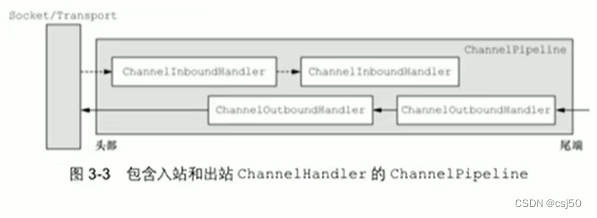
Java基础之《netty(24)—netty入站与出站机制》
一、基本说明
1、netty的组件设计:netty的主要组件有Channel、EventLoop、ChannelFuture、ChannelHandler、ChannelPipe等。
2、ChannelHandler充当了处理入站和出站数据的应用程序逻辑的容器。 例如,实现ChannelInboundHandler接口(或Chan…

Python NumPy 拆分数组
前言NumPy(Numerical Python的缩写)是一个开源的Python科学计算库。使用NumPy,就可以很自然地使用数组和矩阵。NumPy包含很多实用的数学函数,涵盖线性代数运算、傅里叶变换和随机数生成等功能。本文主要介绍Python NumPy 拆分数组…

2022考研人年度总结,描摹23实习备战进行时
今年,是硝烟弥漫的一年在各个科目上努力也常常焦虑不断怀疑是否真的可以在考研的道路上每一件努力的小事看起来无所谓但却十分有必要2022考研热词是“努力” “披星戴月”“痛苦”你的每一个清晨与深夜都刻满了泪水与汗水春天你最爱期待夏天,夏天你说秋天…
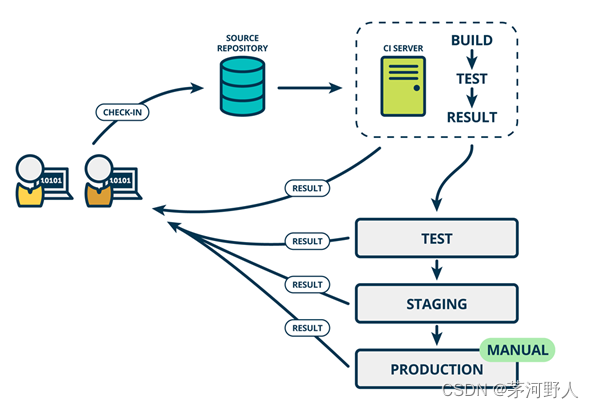
JAVA开发运维(CI/CD)
CI :持续性集成CD:持续性部署SIT:系统集成测试UAT:用户验收测试研发流程的变化,因为用户永远一开始不知道自己想要什么样的东西,导致了软件无法从一而终的进行设计,用户需要能立刻运行的软件和功能。&#…
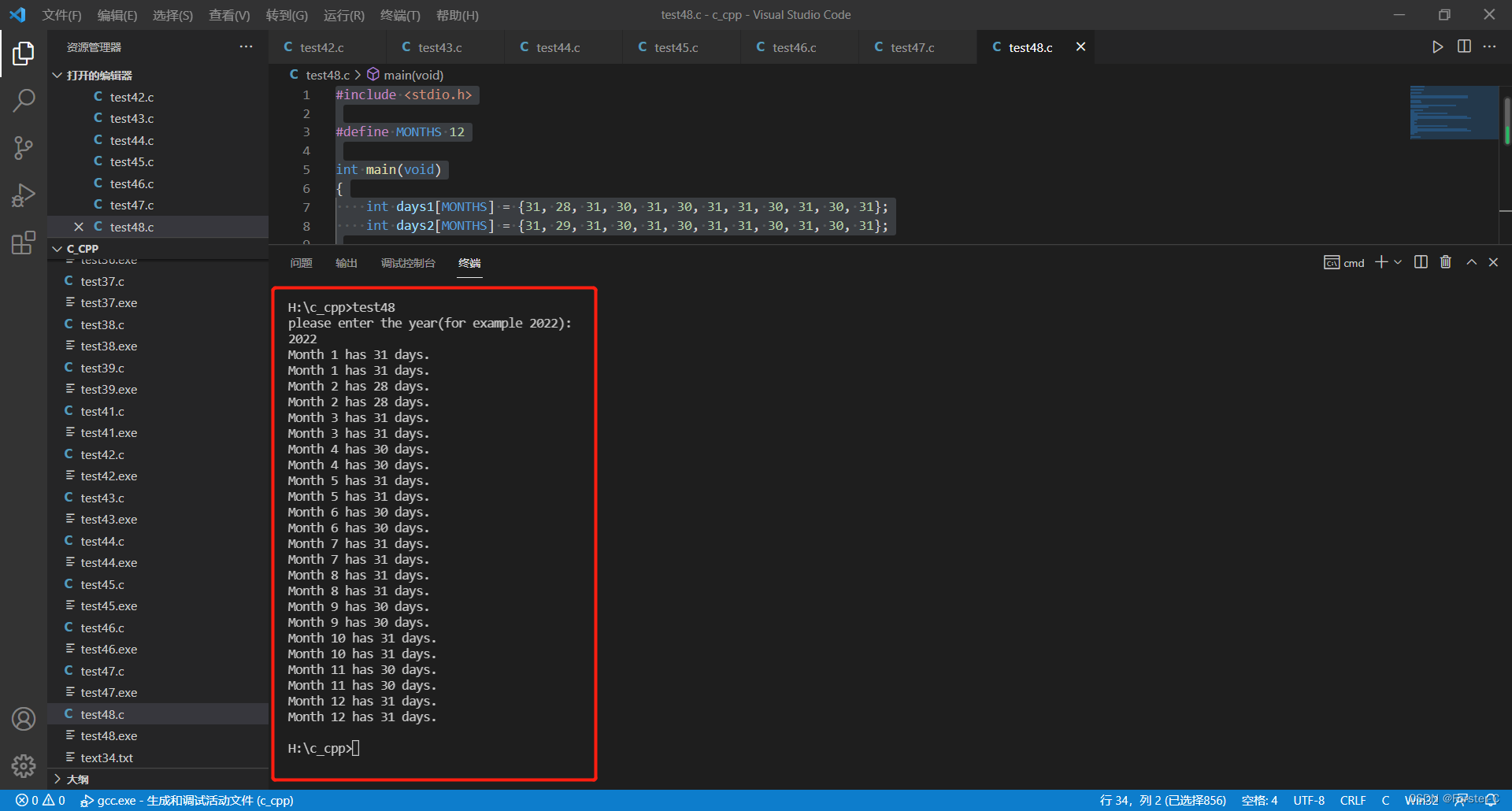
再学C语言36:指针和数组
指针提供了一种用来使用地址的符号方法,可以很有效地处理数组
数组标记实际上是一种变相使用指针的形式
数组名同时也是该数组首元素的地址,如果arr是一个数组,则:
arr &arr[0];
在C中,对一个指针加1的结果是…

【ROS】使用pluginlib自定义costmap地图层
文章目录
文章目录 前言 一、重写地图层 1.包含头文件 2.onInitialize() 3.updateBounds() 4.updateCosts() 二、向ROS注册 1.插件描述文件 2.向ROS注册插件 3.在costmap配置文件中使用 总结 前言
pluginlib是一个 C 库,用于从 ROS 包中加载和卸载插件。插件是从…

SpringBoot实战(十一)集成RebbitMQ
目录1.工作原理图1.1 配置阶段1.2 生产者1.3 消费者2.Maven依赖3.常用交换机类型3.1 direct 直连交换机3.2 fanout 广播交换机3.3 topic 主题交换机4.Direct 直连交换机4.1 yml配置4.2 配置类4.3 消息推送类4.4 消息监听类4.5 测试5.Fanout 广播交换机5.1 配置类5.2 消息推送类…
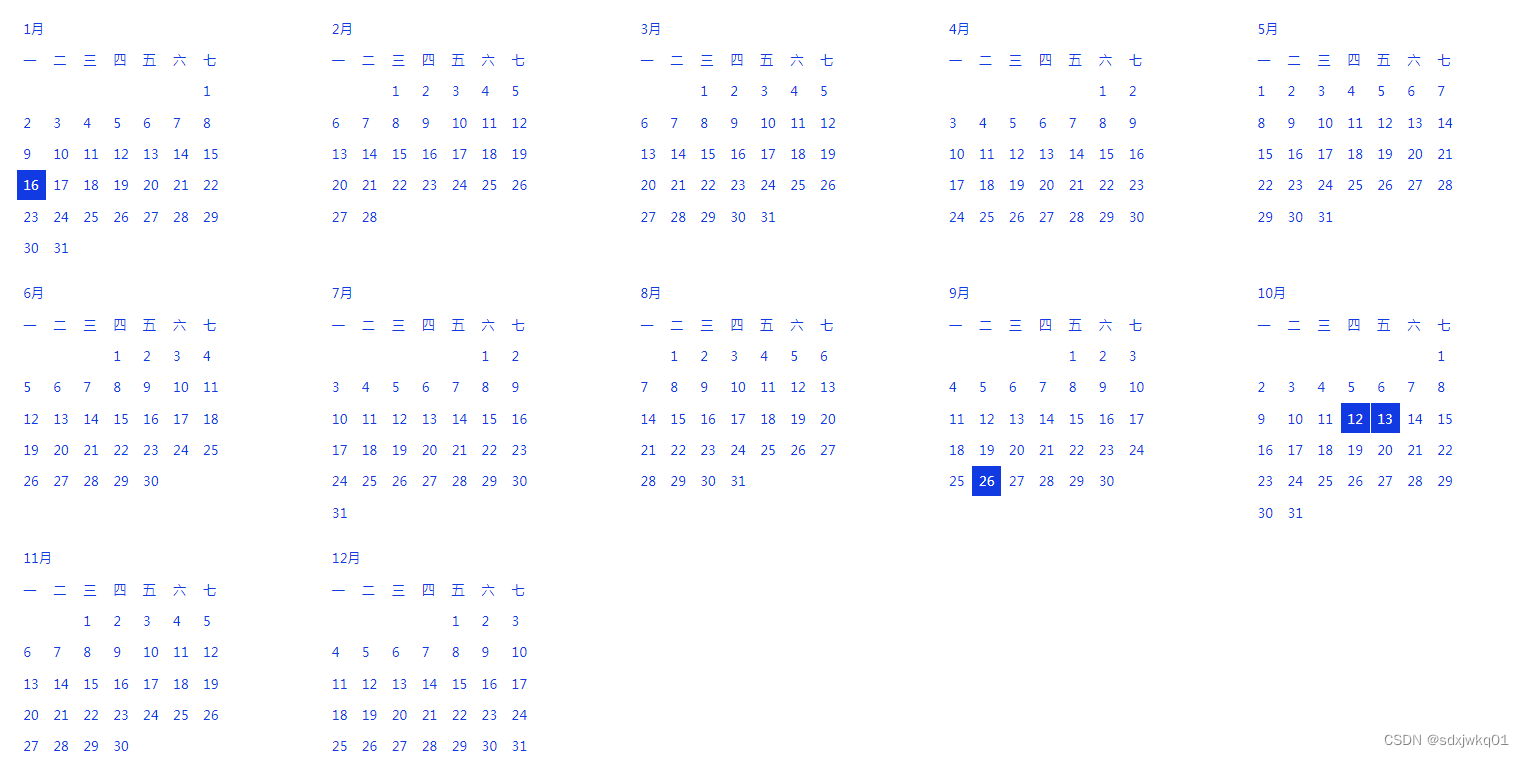
javascript画全年日历
前些日子闲聊群里有人提了用js画全年日历的需求,趁闲暇时间画了个小demo,下面还是先上效果图吧。 高亮显示的是今天的日期和标记要高亮显示的日期,也添加了点击事件的钩子,自己可以实现钩子函数,从而操作点击的日期值。…

综述 | 深度强化学习在自动驾驶中的应用
本文是2020年的综述论文《Deep Reinforcement Learning for Autonomous Driving: A Survey》的部分内容节选。翻译稿全文共2万6千字,本文略掉了第3、4节强化学习理论的介绍及扩展部分。摘要随着深度表征学习(deep representation learning)的发展,强化学…

【8】SCI易中期刊推荐——图像处理领域(中科院4区)
🚀🚀🚀NEW!!!SCI易中期刊推荐栏目来啦 ~ 📚🍀 SCI即《科学引文索引》(Science Citation Index, SCI),是1961年由美国科学信息研究所(Institute for Scientific Information, ISI)创办的文献检索工具,创始人是美国著名情报专家尤金加菲尔德(Eugene Garfield…

windows下Docker部署Flask的教程
Docker默认安装路径是在C盘,Windows中修改Docker**默认安装****路径方法:
1.先创建 D:\Program Files\Docker 目录
2.运行命令,创建链接
mklink /J "C:\Program Files\Docker" "D:\codeSoftware\Docker"3.点击exe安装…

logstash 向多目标输出多份日志输出syslog
logstash默认情况下是内置了输入syslog日志的,但是不支持输出syslog,需要输出syslog的情况下,就需要手动安装logstash-output-syslog插件。安装方法如下:下载logstash-output-syslog插件,https://rubygems.org/downloa…
SpringBoot 注册自己的Servlet(三种方式)
SpringBoot 注册自己的Servlet(三种方式) 目录SpringBoot 注册自己的Servlet(三种方式)方法1:使用servlet3.0规范提供的注解方式注册Servlet1,声明servlet及映射2,加上ServletComponentScan 才会扫描加了这个注解运行结…