1.光流
光流法是计算机视觉中用于估计图像序列中物体运动的关键技术。它类似于观察夜空中的彗星,通过其在天空中的运动轨迹来追踪它的路径。在图像处理中,光流帮助我们理解像素点如何在连续的帧之间移动。
1.1 稀疏光流法
稀疏光流法关注于图像中的关键点(通常是角点或显著的特征点),并计算这些点在连续帧中的运动。Lucas-Kanade算法是这种方法的一个经典例子,它通过比较特征点在连续两帧中的灰度值变化来估计这些点的运动。Lucas-Kanade方法适用于跟踪图像序列中的局部运动,尤其是当特征点清晰且显著时。
1.2 稠密光流法
与稀疏光流法不同,稠密光流法计算图像中每个像素的运动,生成一个速度场,其中每个像素都有一个对应的运动向量。Horn-Schunck算法是稠密光流法的一个代表,它通过平滑约束来优化光流场,假设图像亮度在物体运动的方向上变化不大。
1.3 Lucas-Kanade光流
在Lucas-Kanade光流中,图像的灰度值被视为位置和时间的函数。对于一个固定空间点,尽管其在世界坐标系中的位置是固定的,但在图像平面上的像素坐标会随着相机的运动会发生变化。Lucas-Kanade算法通过最小化重投影误差来估计这些像素坐标的变化,即:
I ( x , y , t ) = I ( x + Δ x , y + Δ y , t + Δ t ) I(x, y, t) = I(x + \Delta x, y + \Delta y, t + \Delta t) I(x,y,t)=I(x+Δx,y+Δy,t+Δt)
其中, I ( x , y , t ) I(x, y, t) I(x,y,t)是在时间 t t t的图像中的灰度值, ( d x , d y ) (dx, dy) (dx,dy)是像素在图像平面上的位移,而 d t dt dt是时间间隔。通过建立一个关于位移 ( d x , d y ) (dx, dy) (dx,dy)的方程组,Lucas-Kanade算法可以估计出特征点的运动。
2. 光流基本假设推导过程
2.1. 光流法的基本假设:
光流法的基本假设是同一个空间点的像素灰度值,在各个图像中的是固定不变的。公式描述为:
I
(
x
,
y
,
t
)
=
I
(
x
+
Δ
x
,
y
+
Δ
y
,
t
+
Δ
t
)
I(x, y, t) = I(x + \Delta x, y + \Delta y, t + \Delta t)
I(x,y,t)=I(x+Δx,y+Δy,t+Δt)
2.2. 泰勒展开:
对上式右侧进行泰勒展开,得到:
I
(
x
+
Δ
x
,
y
+
Δ
y
,
t
+
Δ
t
)
≈
I
(
x
,
y
,
t
)
+
∂
I
∂
x
Δ
x
+
∂
I
∂
y
Δ
y
+
∂
I
∂
t
Δ
t
I(x + \Delta x, y + \Delta y, t + \Delta t) \approx I(x, y, t) + \frac{\partial I}{\partial x}\Delta x + \frac{\partial I}{\partial y}\Delta y + \frac{\partial I}{\partial t}\Delta t
I(x+Δx,y+Δy,t+Δt)≈I(x,y,t)+∂x∂IΔx+∂y∂IΔy+∂t∂IΔt
2.3. 光流约束方程:
因为假设了灰度不变,即
I
(
x
,
y
,
t
)
I(x, y, t)
I(x,y,t)不随
Δ
x
,
Δ
y
,
Δ
t
\Delta x, \Delta y, \Delta t
Δx,Δy,Δt变化,因此有:
∂
I
∂
x
Δ
x
+
∂
I
∂
y
Δ
y
+
∂
I
∂
t
Δ
t
=
0
\frac{\partial I}{\partial x}\Delta x + \frac{\partial I}{\partial y}\Delta y + \frac{\partial I}{\partial t}\Delta t = 0
∂x∂IΔx+∂y∂IΔy+∂t∂IΔt=0
2.4. 速度和梯度:
将像素在 x 轴上的速度记为
u
u
u,在 y 轴上的速度记为
v
v
v,上述方程可以写为:
∂
I
∂
x
u
Δ
t
+
∂
I
∂
y
v
Δ
t
=
−
∂
I
∂
t
\frac{\partial I}{\partial x}u\Delta t + \frac{\partial I}{\partial y}v\Delta t = -\frac{\partial I}{\partial t}
∂x∂IuΔt+∂y∂IvΔt=−∂t∂I
2.5. 矩阵形式:
写成矩阵形式有:
[
I
x
I
y
]
[
u
v
]
=
−
I
t
\begin{bmatrix} I_x & I_y \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix} = -I_t
[IxIy][uv]=−It
2.6. 超定线性方程组:
在 Lucas-Kanade 光流中,引入了新的假设作为约束,即某一个窗口内的像素具有相同的运动。考虑一个大小为
w
×
h
w \times h
w×h 的窗口,其包含
k
k
k个像素。因为假设该窗口内像素具有相同的运动,因此可以得到
k
k
k个方程:
[
I
x
1
I
y
1
I
x
2
I
y
2
⋮
⋮
I
x
k
I
y
k
]
[
u
v
]
=
−
[
I
t
1
I
t
2
⋮
I
t
k
]
\begin{bmatrix} I_x^1 & I_y^1 \\ I_x^2 & I_y^2 \\ \vdots & \vdots \\ I_x^k & I_y^k \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix} = -\begin{bmatrix} I_t^1 \\ I_t^2 \\ \vdots \\ I_t^k \end{bmatrix}
Ix1Ix2⋮IxkIy1Iy2⋮Iyk
[uv]=−
It1It2⋮Itk
记
A
=
[
I
x
1
I
y
1
⋮
I
x
k
I
y
k
]
A = \begin{bmatrix} I_x^1 & I_y^1 \\ \vdots \\ I_x^k & I_y^k \end{bmatrix}
A=
Ix1⋮IxkIy1Iyk
和
b
=
[
I
t
1
⋮
I
t
k
]
b = \begin{bmatrix} I_t^1 \\ \vdots \\ I_t^k \end{bmatrix}
b=
It1⋮Itk
,则方程组可以写为:
A
[
u
v
]
=
b
A\begin{bmatrix} u \\ v \end{bmatrix} = b
A[uv]=b
2.7. 最小二乘解:
该方程是关于
u
u
u 和
v
v
v 的超定线性方程组,可以使用最小二乘法求解:
[
u
v
]
∗
=
−
(
A
T
A
)
−
1
A
T
b
\begin{bmatrix} u \\ v \end{bmatrix}^* = -(A^TA)^{-1}A^Tb
[uv]∗=−(ATA)−1ATb
值得注意的是,上述公式中的 I x , I y , I t I_x, I_y,I_t Ix,Iy,It 分别表示图像在该点的 x 方向梯度、y 方向梯度和时间方向的梯度。 Δ x , Δ y \Delta x,\Delta y Δx,Δy是像素点在图像平面上的位移,而 Δ t \Delta t Δt 是时间间隔。 u u u和 v v v是像素点在 x 和 y 方向上的速度。
3.OpenCV中calcOpticalFlowPyrLK函数
OpenCV中calcOpticalFlowPyrLK方法使用迭代Lucas-Kanade算法计算稀疏特征点的光流,用来做特征点跟踪,该方法使用了金字塔,因此具有一定的尺度不变性。
函数原型:
void cv::calcOpticalFlowPyrLK(
InputArray prevImg,
InputArray nextImg,
InputArray prevPts,
InputOutputArray nextPts,
OutputArray status,
OutputArray err,
Size winSize = Size(21, 21),
int maxLevel = 3,
TermCriteria criteria = TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 0.01),
int flags = 0,
double minEigThreshold = 1e-4
);
prevImg:上一帧图像nextImg:下一帧图像prevPts:上一帧图像中关键点nextPts:根据光流计算的上一帧关键点在当前帧中的位置status:关键点的跟踪状态,vector,1表示OK,0表示LOSTerr:每个特征点的跟踪误差vector<float>有len(status)==len(nextPts)==len(prePts)==len(err)winSize:在每层金字塔中,LK算法中用来求解计算像素运动而假设具有相同运动的窗口大小。maxLevel:金字塔的层数,层数多,尺度不变性能更好,运算时间更久criteria:迭代搜索算法的终止条件,默认值表示在指定的最大迭代次数criteria.maxCount(30)之后或当搜索窗口移动小于criteria.epsilon(0.01)时终止迭代flags:设置误差或者初始值参数,可选下面两个值:-
OPTFLOW_USE_INITIAL_FLOW设置使用nextPts中的值作为迭代的初始值,如果不设置为OPTFLOW_USE_INITIAL_FLOW,初始状态就使用prevPts中的值,直接从prevPts复制到nextPts,OpenCV源码中对OPTFLOW_USE_INITIAL_FLOW的使用方式为:if( flags & OPTFLOW_USE_INITIAL_FLOW ) nextPt = nextPts[ptidx]*(float)(1./(1 << level)); else nextPt = prevPt;OPTFLOW_LK_GET_MIN_EIGENVALS,flags设置为这个值时使用光流运动方程2x2的正规矩阵,也即空间梯度矩阵的最小特征值作为误差项。如果不设置成OPTFLOW_LK_GET_MIN_EIGENVALS,将原始点和移动点周围像素的距离除以窗口中的像素作为误差项。
-
minEigThreshold:迭代LK算法会计算光流运动方程2x2的正规矩阵,也即空间梯度矩阵的最小特征值,然后再除以运动不变窗口中的像素总数作为一个误差评价标准,当其小于minEigThreshold时,说明这个点已经追踪不到了,会将其从追踪特征点中移除,避免其对应相素运动的计算,可提升性能。
calcOpticalFlowPyrLK通常和goodFeatureToTrack方法一起使用,先使用GFTTDetector提取特征点的位置,再使用calcOpticalFlowPyrLK追踪其在连续视频流中的位置,避免了特征描述子的计算和特征点的匹配,可以极大的提升追踪的性能。
c++实现:
#include <memory>
#include <vector>
#include <cstdlib>
#include <opencv2/features2d.hpp>
#include <opencv2/opencv.hpp>
// 定义一个名为TestOpticalFlowLK的类,用于处理光流跟踪
class TestOpticalFlowLK {
public:
// 使用std::shared_ptr来定义智能指针,便于管理类的实例
typedef std::shared_ptr<TestOpticalFlowLK> Ptr;
// 构造函数
TestOpticalFlowLK();
// 默认的析构函数
// track函数用于处理特征点的跟踪
void track(std::vector<cv::String> &filenames) const;
private:
// 使用cv::Ptr来定义一个智能指针,指向GFTTDetector对象
cv::Ptr<cv::GFTTDetector> gftt_ptr_;
};
// 实现TestOpticalFlowLK类的构造函数
TestOpticalFlowLK::TestOpticalFlowLK()
{
// 初始化GFTTDetector对象,用于特征点检测
gftt_ptr_ = cv::GFTTDetector::create(500, 0.2, 50);
}
// 实现track函数,用于处理特征点的跟踪
void TestOpticalFlowLK::track(std::vector<cv::String> &filenames) const
{
// 确保filenames至少有一个元素
assert(filenames.size() > 1);
// 存储检测到的特征点
std::vector<cv::KeyPoint> kps1;
// 存储上一帧和当前帧中特征点的位置
std::vector<cv::Point2f> pts1, pts2;
// 存储绘制特征点时使用的颜色
std::vector<cv::Scalar> colors;
// 读取第一帧图像,并初始化last_img
cv::Mat last_img = cv::imread(filenames[0], 0), cur_img;
// 创建一个掩码,用于绘制特征点
cv::Mat mask(last_img.size(), CV_8UC1, 255);
// 使用GFTTDetector检测第一帧图像中的特征点
gftt_ptr_->detect(last_img, kps1, mask);
// 遍历所有检测到的特征点
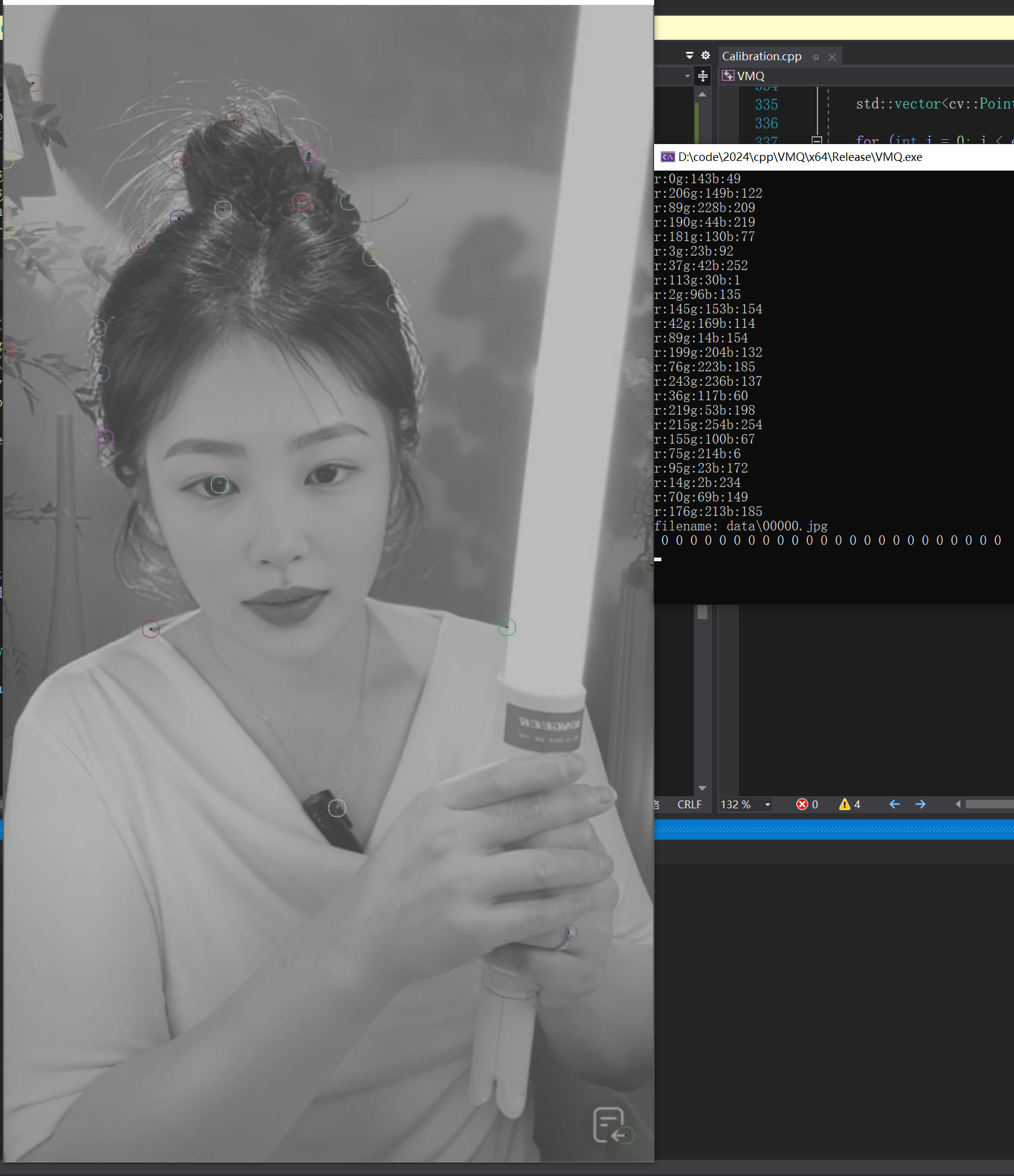
for(auto &kp : kps1) {
// 为每个特征点生成一个随机颜色
int r = (int)(255. * rand() / (RAND_MAX + 1.f));
int g = (int)(255. * rand() / (RAND_MAX + 1.f));
int b = (int)(255. * rand() / (RAND_MAX + 1.f));
// 输出随机颜色的值
std::cout << "r:" << r << "g:" << g << "b:" << b << std::endl;
// 将颜色添加到colors数组中
colors.emplace_back(r, g, b);
// 将特征点的位置添加到pts1和pts2数组中
pts1.push_back(kp.pt);
pts2.push_back(kp.pt);
}
// 存储特征点的跟踪状态
std::vector<uchar> status;
// 存储每个特征点的跟踪误差
std::vector<float> err;
// 将掩码转换为BGR格式,以便绘制
cv::cvtColor(mask, mask, cv::COLOR_GRAY2BGR);
// 创建一个Mat对象,用于存储绘制特征点后的图像
cv::Mat frame;
// 遍历所有提供的图像文件名
for (auto &filename : filenames)
{
// 输出当前处理的文件名
std::cout << "filename: " << filename << std::endl;
// 读取当前帧图像
cur_img = cv::imread(filename, 0);
// 使用calcOpticalFlowPyrLK计算特征点的光流
cv::calcOpticalFlowPyrLK(last_img,
cur_img,
pts1,
pts2,
status,
err,
cv::Size(13, 13),
3,
cv::TermCriteria(cv::TermCriteria::COUNT + cv::TermCriteria::EPS, 30, 0.01),
cv::OPTFLOW_USE_INITIAL_FLOW
);
// 将当前帧图像转换为BGR格式
cv::cvtColor(cur_img, cur_img, cv::COLOR_GRAY2BGR);
int cnt = 0; // 用于计数成功跟踪的特征点数量
// 遍历所有特征点
for(size_t i = 0; i < status.size(); i++) {
// 输出当前特征点的跟踪误差
std::cout << " " << err[i];
// 如果特征点未成功跟踪,则跳过
if(!status[i]) continue;
// 如果特征点的移动距离超过80像素,则跳过
if(abs((pts1[i].x - pts2[i].x)) > 80 ||
abs((pts1[i].y - pts2[i].y)) > 80) continue;
// 在掩码上绘制特征点之间的连线
cv::line(mask, pts1[i], pts2[i], colors[i], 2);
// 在当前帧图像上绘制特征点
cv::circle(cur_img, pts2[i], 10, colors[i], 1);
// 更新pts1中的坐标为pts2中的坐标
pts1[i].x = pts2[i].x;
pts1[i].y = pts2[i].y;
// 增加成功跟踪的特征点计数
cnt += 1;
}
// 输出每帧成功跟踪的特征点数量
std::cout << std::endl;
// 将掩码和当前帧图像混合,以便同时显示原始图像和特征点
cv::addWeighted(mask, 0.5, cur_img, 0.5, -65, frame);
// 显示混合后的图像
cv::imshow("frame", frame);
// 等待用户按键,0表示无限等待
cv::waitKey(0);
// 更新last_img为当前帧图像
cv::cvtColor(cur_img, cur_img, cv::COLOR_BGR2GRAY);
last_img = cur_img;
// 保存混合后的图像到文件
cv::imwrite("frame.png", frame);
}
}
Python 代码:
import cv2
import numpy as np
import random
class TestOpticalFlowLK:
def __init__(self):
# 初始化GFTTDetector对象,用于特征点检测
self.gftt_ptr_ = cv2.GFTTDetector_create(500, 0.2, 50)
def track(self, filenames):
assert len(filenames) > 1, "At least one filename is required"
last_img = cv2.imread(filenames[0], 0)
kps1 = self.gftt_ptr_.detect(last_img)
pts1 = np.array([kp.pt for kp in kps1], dtype='float32')
pts2 = np.zeros((len(pts1), 2), dtype='float32')
colors = [((random.randint(0, 255), random.randint(0, 255), random.randint(0, 255)) for _ in range(len(kps1)))]
status = np.zeros((len(pts1),), dtype='uint8')
err = np.zeros((len(pts1),), dtype='float32')
for filename in filenames[1:]:
print("Processing file:", filename)
cur_img = cv2.imread(filename, 0)
pts2, status, err = cv2.calcOpticalFlowPyrLK(last_img, cur_img, pts1, pts2, None, winSize=(13, 13), maxLevel=3,
criteria=(cv2.TERM_CRITERIA_COUNT | cv2.TERM_CRITERIA_EPS, 30, 0.01),
flags=cv2.OPTFLOW_USE_INITIAL_FLOW)
img = cv2.cvtColor(cur_img, cv2.COLOR_GRAY2BGR)
for i, (pt1, pt2, stat) in enumerate(zip(pts1, pts2, status)):
if stat:
# 确保坐标是一维数组
pt1 = pt1.reshape(-1)
pt2 = pt2.reshape(-1)
cv2.line(img, (int(pt1[0]), int(pt1[1])), (int(pt2[0]), int(pt2[1])), (255), 2)
cv2.circle(img, (int(pt2[0]), int(pt2[1])), 10, (127), 1)
pts1 = pts2.copy()
last_img = cur_img
cv2.imshow("frame", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
# 假设我们有一个包含图像文件路径的列表
filenames = ['data/00001.jpg', 'data/00001.jpg', 'data/00002.jpg','data/00003.jpg'] # 以此类推
flow_tracker = TestOpticalFlowLK()
flow_tracker.track(filenames)







![[ue5]编译报错:使用未定义的 struct“FPointDamageEvent“](https://img-blog.csdnimg.cn/direct/a38082293b114764a5b4108e5160f6b0.png)