腿式运动以一系列机器人和地面之间的点接触为特征。其主要优点包括在粗糙地形上的自适应性和机动性。
因为只需要一组点接触,所以只要机器人能够保持适当的地面步距,这些点之间的地面质量是无关紧要的。另外,只要行走机器人的步距大于洞穴的宽度,它就能跨越洞穴或者裂口。腿式运动的最后一个优点是,有高度的技巧来操纵环境中的物体。
举一个精彩的昆虫例子,即甲壳虫,它用灵巧的前肢在运动的同时能够滚动一个球。
腿式运动的最主要的缺点包括动力和机械的复杂性。腿,可能包括几个自由度,必须能够支撑机器人部分总重量,而且在许多机器人中,腿必须能够抬高和放低机器人。另外,如果腿有足够数目的自由度,在许多不同的方向给予力,机器人就能实现高度的机动性。
腿的构造与稳定性
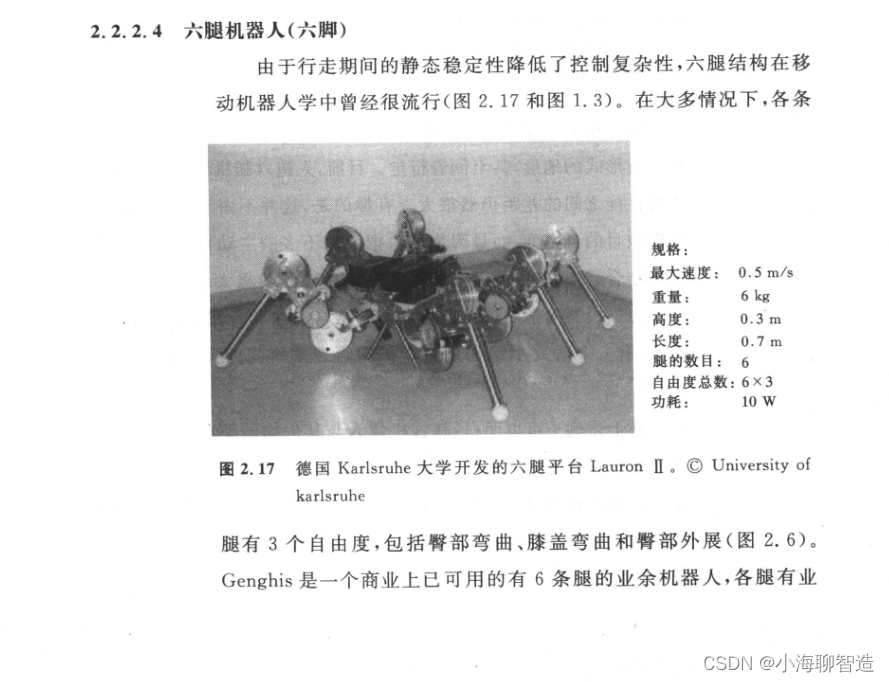
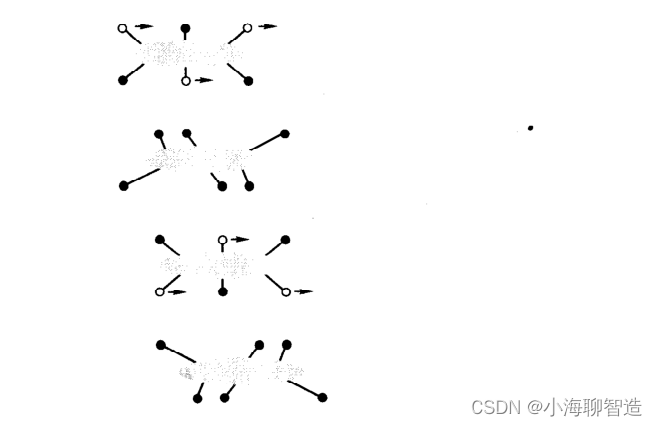
因为腿式机器人受到生物学上的启发,所以检验一下生物学上成功的有腿系统是有益的。许多不同的腿的构造已经在各种各样的生物体中成功地存在(
。大型动物,如哺乳动物和爬行动物有4条腿,而昆虫有6条腿或更多。某些哺乳动物,仅靠2条腿行走的能力已经很完美。
尤其是人类,平衡能力已经进展到甚至可用单腿进行跳跃的水平”。这种异常的机动性是以很高代价得来的:保持平衡的更复杂的主动控制。
相反,3条腿的动物假定它能保证其重心处在地面接触的三脚区内,它就能够展示静止、稳定的姿态。如3条腿的子所展现那样,静止稳定性意味着不需要运动而保持平衡。在没有外力时,稳定性小的偏离(比如轻轻推凳子)会被动地子以校正而趋向稳定的姿态。
但是,机器人必须能够抬腿行走。为了能达到静态行走,机器人必须至少有6条腿。在这种结构下,有可能设计出一种步态。按此,腿的静态稳定三脚区总是与地面接触
昆虫和蜘蛛一出生立即能行走。对它们来说,行走时的平衡问题比较简单。4条腿的哺乳动物不能稳定地行走,但是用4条腿能很容易地站立。比如野生动物,在它们能站起来之前要花几分钟来尝试,然后又要花好几分钟学习行走而不摔倒。2条腿的人类,甚至不能以静止稳定方式站在一个位置。婴儿需要几个月才能站立和行走,甚至需要更长时间来学习跳跃、跑步和单腿站立。
各个腿的复杂性种类繁多,也存在潜在的能力。再者,生物世界提供了丰富的处于两个极端的例子。例如,毛虫利用液压,通过构建体腔和增加压力使各腿伸展,而且通过释放液压使各腿纵向地回收,然后刺激单个可拉伸的肌肉,牵引腿靠向身体。各条腿只有1个自由度,它沿着腿纵向地定方向。前向运动依赖于体内的液压,它能伸张两腿问的距离。毛虫的腿在机械上很简单,即利用最少数目的外表肌肉,完成丁复杂的整体运动。
在另一极端,连同脚趾的深层刺激,人腿有7个以上的主自由度,15个以上的肌肉群,激励8个复合的关节。
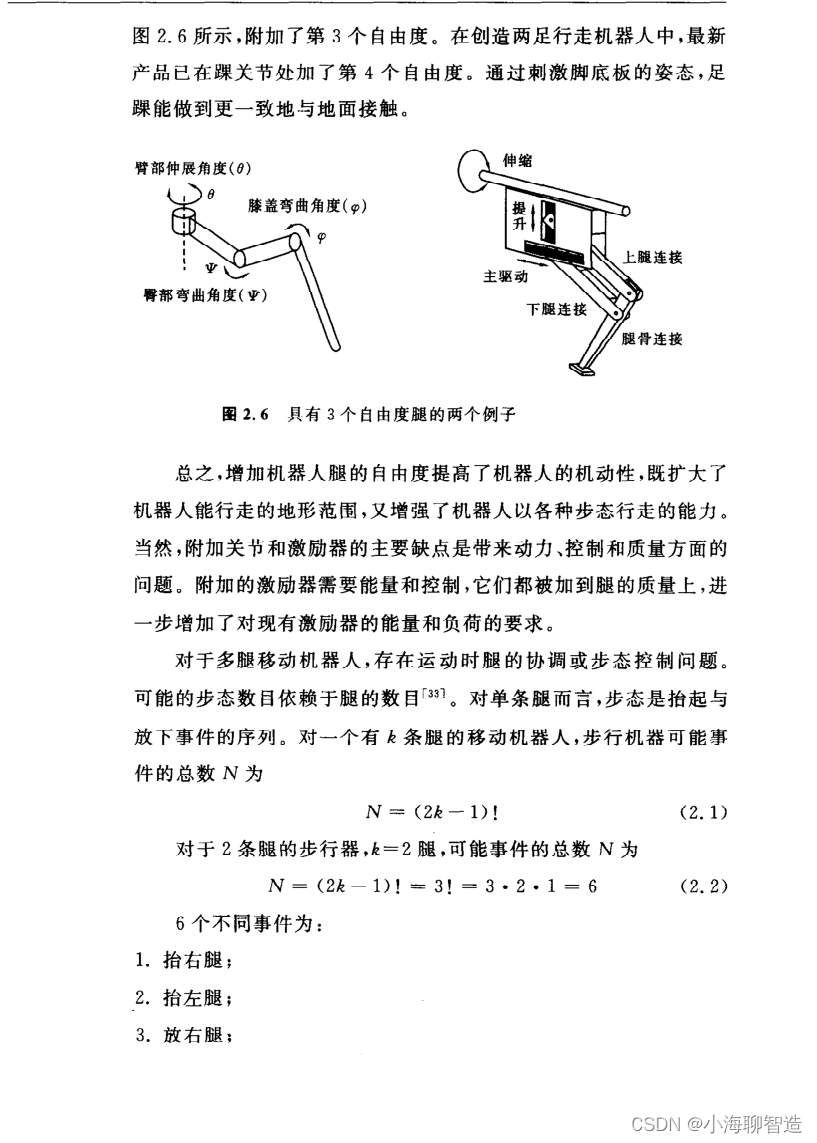
在腿式移动机器人情况下,通常要求至少2个自由度,通过提起腿和将腿摆动向前,使腿向前运动。更普通的是对更复杂的移动,如