视频降噪
视频降噪是一种处理技术,旨在减少视频中的噪声,提高画面质量。噪声可能来自多种源头,包括摄像机的传感器、压缩算法、传输过程中的干扰等。降噪处理对于视频监控、视频会议、电影后期制作以及任何需要高画质输出的应用场景都非常重要。
视频降噪技术通常包括以下几个关键点:
-
时域降噪:利用连续视频帧之间的时间冗余,通过分析连续帧中相同位置像素的变化来识别噪声,并进行相应的处理。
-
空域降噪:在单帧视频内,通过分析像素邻域内的亮度和色度信息来识别并减少噪声。
-
3D降噪:结合时域和空域信息,同时考虑视频帧的当前帧和相邻帧,进行更加复杂的降噪处理。
-
非线性降噪:某些算法采用非线性处理方法,如中值滤波或维纳滤波,来减少噪声,这些方法对某些类型的噪声特别有效。
-
自适应降噪:根据视频内容的复杂性和噪声水平动态调整降噪强度。
-
基于模型的降噪:使用统计模型或机器学习技术来识别噪声模式,并进行相应的降噪处理。
-
运动补偿:在视频中,运动物体的噪声处理需要特别考虑,以避免在运动补偿过程中引入伪影。
-
硬件加速:某些降噪算法可以在GPU或其他专用硬件上执行,以提高处理速度。
-
用户控制:许多降噪工具提供用户界面,允许用户根据需要调整降噪参数。
关于视频降噪的算法综述可以参考:视频降噪综述。
hqdn3d
hqdn3d(High Quality 3D Denoise)是一种高质量的三维视频降噪算法,主要用于去除视频中的噪声。hqdn3d算法能够有效地去除视频中的高频率噪声,同时尽量减少图像的失真和模糊,保持视频质量。
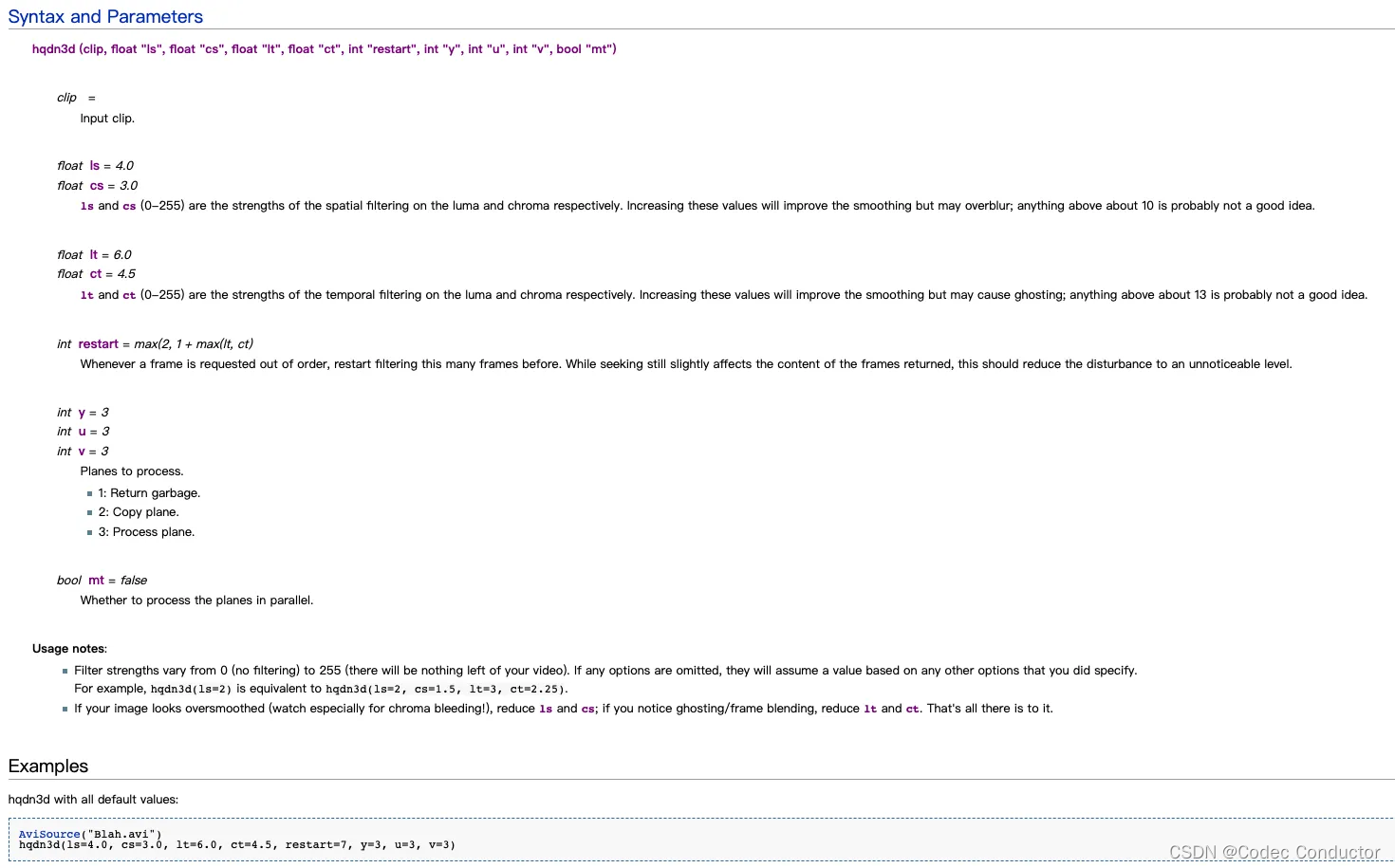
hqdn3d算法已经被实现为AviSynth插件,并且可以在FFmpeg中作为滤镜使用,例如通过命令 ffmpeg -i input.avi -vf hqdn3d output.mp4 来应用。高质量去噪3D是一个AviSynth端口的同名MPlayer过滤器。采用3路低通滤波,在完全去除高频噪声的同时最大限度地减少混合伪影。
-
在AviSynth中使用 hqdn3d 方法如下:有对应的空域滤波、时域滤波的亮度和色度强度设置参数。
-
AviSynth官网:http://www.avisynth.org/
-
FFmpeg 官网:https://ffmpeg.org/
原理
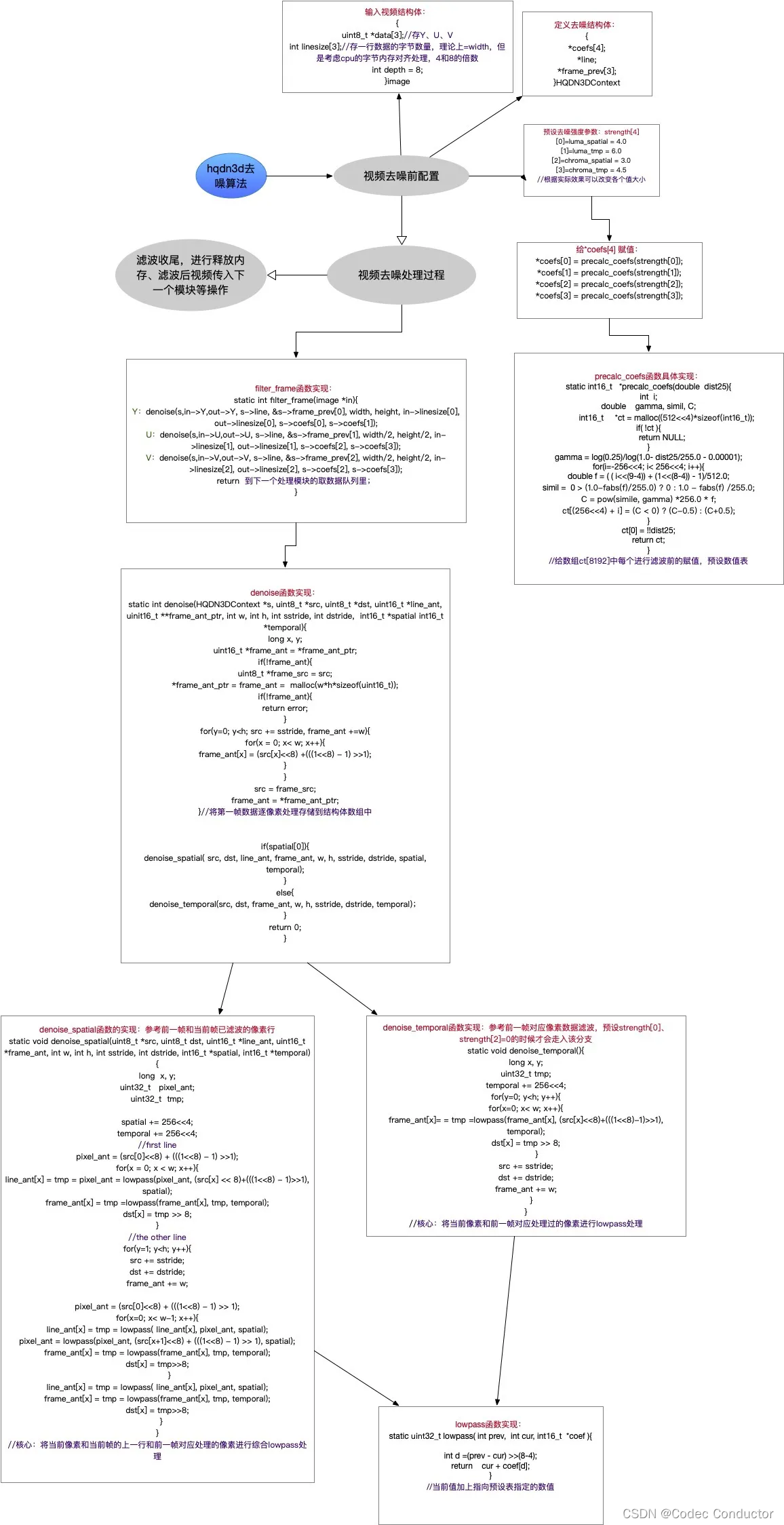
hqdn3d 算法的原理相对比较容易理解,总结其原理,如下:
- 该算法是像素处理,不涉及频域和运动搜索;
- 空域去噪时,当前像素参考当前帧左邻、上邻和前一帧同一位置的像素,对每个像素多次应用低通滤波器;
- 时域去噪时,参考前一帧同一位置的像素,对每个像素应用一个低通滤波器;
- 根据相邻像素的差,确定偏移量,将相邻像素颜色值“拉近”,即对像素做加减法,以达到降噪目的;
- 对于较小的像素差异,hqdn3d会拉近距离,若差异较大,降低偏置系数,达到保边效果;
- 可以通过外部设置滤波强度,调整峰值位置;
- 分析 FFmpeg 中 hqdn3d 算法,算法实现流程如下:
源码
- FFmpeg 中 filter 滤镜对应的 hqdn3d 算法实现
/*
* Copyright (c) 2003 Daniel Moreno <comac AT comac DOT darktech DOT org>
* Copyright (c) 2010 Baptiste Coudurier
* Copyright (c) 2012 Loren Merritt
*
* This file is part of FFmpeg, ported from MPlayer.
*
* FFmpeg is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* FFmpeg is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along
* with FFmpeg; if not, write to the Free Software Foundation, Inc.,
* 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
*/
/**
* @file
* high quality 3d video denoiser, ported from MPlayer
* libmpcodecs/vf_hqdn3d.c.
*/
#include <float.h>
#include "config.h"
#include "libavutil/attributes.h"
#include "libavutil/common.h"
#include "libavutil/pixdesc.h"
#include "libavutil/intreadwrite.h"
#include "libavutil/opt.h"
#include "avfilter.h"
#include "formats.h"
#include "internal.h"
#include "video.h"
#include "vf_hqdn3d.h"
#define LUT_BITS (depth==16 ? 8 : 4)
#define LOAD(x) (((depth == 8 ? src[x] : AV_RN16A(src + (x) * 2)) << (16 - depth))\
+ (((1 << (16 - depth)) - 1) >> 1))
#define STORE(x,val) (depth == 8 ? dst[x] = (val) >> (16 - depth) : \
AV_WN16A(dst + (x) * 2, (val) >> (16 - depth)))
av_always_inline
static uint32_t lowpass(int prev, int cur, int16_t *coef, int depth)
{
int d = (prev - cur) >> (8 - LUT_BITS);
return cur + coef[d];
}
av_always_inline
static void denoise_temporal(uint8_t *src, uint8_t *dst,
uint16_t *frame_ant,
int w, int h, int sstride, int dstride,
int16_t *temporal, int depth)
{
long x, y;
uint32_t tmp;
temporal += 256 << LUT_BITS;
for (y = 0; y < h; y++) {
for (x = 0; x < w; x++) {
frame_ant[x] = tmp = lowpass(frame_ant[x], LOAD(x), temporal, depth);
STORE(x, tmp);
}
src += sstride;
dst += dstride;
frame_ant += w;
}
}
av_always_inline
static void denoise_spatial(HQDN3DContext *s,
uint8_t *src, uint8_t *dst,
uint16_t *line_ant, uint16_t *frame_ant,
int w, int h, int sstride, int dstride,
int16_t *spatial, int16_t *temporal, int depth)
{
long x, y;
uint32_t pixel_ant;
uint32_t tmp;
spatial += 256 << LUT_BITS;
temporal += 256 << LUT_BITS;
/* First line has no top neighbor. Only left one for each tmp and
* last frame */
pixel_ant = LOAD(0);
for (x = 0; x < w; x++) {
line_ant[x] = tmp = pixel_ant = lowpass(pixel_ant, LOAD(x), spatial, depth);
frame_ant[x] = tmp = lowpass(frame_ant[x], tmp, temporal, depth);
STORE(x, tmp);
}
for (y = 1; y < h; y++) {
src += sstride;
dst += dstride;
frame_ant += w;
if (s->denoise_row[depth]) {
s->denoise_row[depth](src, dst, line_ant, frame_ant, w, spatial, temporal);
continue;
}
pixel_ant = LOAD(0);
for (x = 0; x < w-1; x++) {
line_ant[x] = tmp = lowpass(line_ant[x], pixel_ant, spatial, depth);
pixel_ant = lowpass(pixel_ant, LOAD(x+1), spatial, depth);
frame_ant[x] = tmp = lowpass(frame_ant[x], tmp, temporal, depth);
STORE(x, tmp);
}
line_ant[x] = tmp = lowpass(line_ant[x], pixel_ant, spatial, depth);
frame_ant[x] = tmp = lowpass(frame_ant[x], tmp, temporal, depth);
STORE(x, tmp);
}
}
av_always_inline
static int denoise_depth(HQDN3DContext *s,
uint8_t *src, uint8_t *dst,
uint16_t *line_ant, uint16_t **frame_ant_ptr,
int w, int h, int sstride, int dstride,
int16_t *spatial, int16_t *temporal, int depth)
{
// FIXME: For 16-bit depth, frame_ant could be a pointer to the previous
// filtered frame rather than a separate buffer.
long x, y;
uint16_t *frame_ant = *frame_ant_ptr;
if (!frame_ant) {
uint8_t *frame_src = src;
*frame_ant_ptr = frame_ant = av_malloc_array(w, h*sizeof(uint16_t));
if (!frame_ant)
return AVERROR(ENOMEM);
for (y = 0; y < h; y++, src += sstride, frame_ant += w)
for (x = 0; x < w; x++)
frame_ant[x] = LOAD(x);
src = frame_src;
frame_ant = *frame_ant_ptr;
}
if (spatial[0])
denoise_spatial(s, src, dst, line_ant, frame_ant,
w, h, sstride, dstride, spatial, temporal, depth);
else
denoise_temporal(src, dst, frame_ant,
w, h, sstride, dstride, temporal, depth);
emms_c();
return 0;
}
#define denoise(...) \
do { \
int ret = AVERROR_BUG; \
switch (s->depth) { \
case 8: ret = denoise_depth(__VA_ARGS__, 8); break; \
case 9: ret = denoise_depth(__VA_ARGS__, 9); break; \
case 10: ret = denoise_depth(__VA_ARGS__, 10); break; \
case 12: ret = denoise_depth(__VA_ARGS__, 12); break; \
case 14: ret = denoise_depth(__VA_ARGS__, 14); break; \
case 16: ret = denoise_depth(__VA_ARGS__, 16); break; \
} \
if (ret < 0) { \
av_frame_free(&out); \
if (!direct) \
av_frame_free(&in); \
return ret; \
} \
} while (0)
static void precalc_coefs(double dist25, int depth, int16_t *ct)
{
int i;
double gamma, simil, C;
gamma = log(0.25) / log(1.0 - FFMIN(dist25,252.0)/255.0 - 0.00001);
for (i = -256<<LUT_BITS; i < 256<<LUT_BITS; i++) {
double f = ((i<<(9-LUT_BITS)) + (1<<(8-LUT_BITS)) - 1) / 512.0; // midpoint of the bin
simil = FFMAX(0, 1.0 - fabs(f) / 255.0);
C = pow(simil, gamma) * 256.0 * f;
ct[(256<<LUT_BITS)+i] = lrint(C);
}
ct[0] = !!dist25;
}
#define PARAM1_DEFAULT 4.0
#define PARAM2_DEFAULT 3.0
#define PARAM3_DEFAULT 6.0
static av_cold int init(AVFilterContext *ctx)
{
HQDN3DContext *s = ctx->priv;
if (!s->strength[LUMA_SPATIAL])
s->strength[LUMA_SPATIAL] = PARAM1_DEFAULT;
if (!s->strength[CHROMA_SPATIAL])
s->strength[CHROMA_SPATIAL] = PARAM2_DEFAULT * s->strength[LUMA_SPATIAL] / PARAM1_DEFAULT;
if (!s->strength[LUMA_TMP])
s->strength[LUMA_TMP] = PARAM3_DEFAULT * s->strength[LUMA_SPATIAL] / PARAM1_DEFAULT;
if (!s->strength[CHROMA_TMP])
s->strength[CHROMA_TMP] = s->strength[LUMA_TMP] * s->strength[CHROMA_SPATIAL] / s->strength[LUMA_SPATIAL];
av_log(ctx, AV_LOG_VERBOSE, "ls:%f cs:%f lt:%f ct:%f\n",
s->strength[LUMA_SPATIAL], s->strength[CHROMA_SPATIAL],
s->strength[LUMA_TMP], s->strength[CHROMA_TMP]);
return 0;
}
static av_cold void uninit(AVFilterContext *ctx)
{
HQDN3DContext *s = ctx->priv;
av_freep(&s->coefs[0]);
av_freep(&s->coefs[1]);
av_freep(&s->coefs[2]);
av_freep(&s->coefs[3]);
av_freep(&s->line[0]);
av_freep(&s->line[1]);
av_freep(&s->line[2]);
av_freep(&s->frame_prev[0]);
av_freep(&s->frame_prev[1]);
av_freep(&s->frame_prev[2]);
}
static int query_formats(AVFilterContext *ctx)
{
static const enum AVPixelFormat pix_fmts[] = {
AV_PIX_FMT_YUV420P, AV_PIX_FMT_YUV422P, AV_PIX_FMT_YUV444P,
AV_PIX_FMT_YUV410P, AV_PIX_FMT_YUV411P, AV_PIX_FMT_YUV440P,
AV_PIX_FMT_YUVJ420P, AV_PIX_FMT_YUVJ422P, AV_PIX_FMT_YUVJ444P, AV_PIX_FMT_YUVJ440P,
AV_PIX_FMT_YUV420P9, AV_PIX_FMT_YUV422P9, AV_PIX_FMT_YUV444P9,
AV_PIX_FMT_YUV420P10, AV_PIX_FMT_YUV422P10, AV_PIX_FMT_YUV444P10,
AV_PIX_FMT_YUV440P10,
AV_PIX_FMT_YUV444P12, AV_PIX_FMT_YUV422P12, AV_PIX_FMT_YUV420P12,
AV_PIX_FMT_YUV440P12,
AV_PIX_FMT_YUV444P14, AV_PIX_FMT_YUV422P14, AV_PIX_FMT_YUV420P14,
AV_PIX_FMT_YUV420P16, AV_PIX_FMT_YUV422P16, AV_PIX_FMT_YUV444P16,
AV_PIX_FMT_NONE
};
AVFilterFormats *fmts_list = ff_make_format_list(pix_fmts);
if (!fmts_list)
return AVERROR(ENOMEM);
return ff_set_common_formats(ctx, fmts_list);
}
static void calc_coefs(AVFilterContext *ctx)
{
HQDN3DContext *s = ctx->priv;
for (int i = 0; i < 4; i++)
precalc_coefs(s->strength[i], s->depth, s->coefs[i]);
}
static int config_input(AVFilterLink *inlink)
{
AVFilterContext *ctx = inlink->dst;
HQDN3DContext *s = inlink->dst->priv;
const AVPixFmtDescriptor *desc = av_pix_fmt_desc_get(inlink->format);
int i, depth;
uninit(inlink->dst);
s->hsub = desc->log2_chroma_w;
s->vsub = desc->log2_chroma_h;
s->depth = depth = desc->comp[0].depth;
for (i = 0; i < 3; i++) {
s->line[i] = av_malloc_array(inlink->w, sizeof(*s->line[i]));
if (!s->line[i])
return AVERROR(ENOMEM);
}
for (i = 0; i < 4; i++) {
s->coefs[i] = av_malloc((512<<LUT_BITS) * sizeof(int16_t));
if (!s->coefs[i])
return AVERROR(ENOMEM);
}
calc_coefs(ctx);
if (ARCH_X86)
ff_hqdn3d_init_x86(s);
return 0;
}
typedef struct ThreadData {
AVFrame *in, *out;
int direct;
} ThreadData;
static int do_denoise(AVFilterContext *ctx, void *data, int job_nr, int n_jobs)
{
HQDN3DContext *s = ctx->priv;
const ThreadData *td = data;
AVFrame *out = td->out;
AVFrame *in = td->in;
int direct = td->direct;
denoise(s, in->data[job_nr], out->data[job_nr],
s->line[job_nr], &s->frame_prev[job_nr],
AV_CEIL_RSHIFT(in->width, (!!job_nr * s->hsub)),
AV_CEIL_RSHIFT(in->height, (!!job_nr * s->vsub)),
in->linesize[job_nr], out->linesize[job_nr],
s->coefs[job_nr ? CHROMA_SPATIAL : LUMA_SPATIAL],
s->coefs[job_nr ? CHROMA_TMP : LUMA_TMP]);
return 0;
}
static int filter_frame(AVFilterLink *inlink, AVFrame *in)
{
AVFilterContext *ctx = inlink->dst;
AVFilterLink *outlink = ctx->outputs[0];
AVFrame *out;
int direct = av_frame_is_writable(in) && !ctx->is_disabled;
ThreadData td;
if (direct) {
out = in;
} else {
out = ff_get_video_buffer(outlink, outlink->w, outlink->h);
if (!out) {
av_frame_free(&in);
return AVERROR(ENOMEM);
}
av_frame_copy_props(out, in);
}
td.in = in;
td.out = out;
td.direct = direct;
/* one thread per plane */
ctx->internal->execute(ctx, do_denoise, &td, NULL, 3);
if (ctx->is_disabled) {
av_frame_free(&out);
return ff_filter_frame(outlink, in);
}
if (!direct)
av_frame_free(&in);
return ff_filter_frame(outlink, out);
}
static int process_command(AVFilterContext *ctx, const char *cmd, const char *args,
char *res, int res_len, int flags)
{
int ret;
ret = ff_filter_process_command(ctx, cmd, args, res, res_len, flags);
if (ret < 0)
return ret;
calc_coefs(ctx);
return 0;
}
#define OFFSET(x) offsetof(HQDN3DContext, x)
#define FLAGS AV_OPT_FLAG_VIDEO_PARAM | AV_OPT_FLAG_FILTERING_PARAM | AV_OPT_FLAG_RUNTIME_PARAM
static const AVOption hqdn3d_options[] = {
{ "luma_spatial", "spatial luma strength", OFFSET(strength[LUMA_SPATIAL]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },
{ "chroma_spatial", "spatial chroma strength", OFFSET(strength[CHROMA_SPATIAL]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },
{ "luma_tmp", "temporal luma strength", OFFSET(strength[LUMA_TMP]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },
{ "chroma_tmp", "temporal chroma strength", OFFSET(strength[CHROMA_TMP]), AV_OPT_TYPE_DOUBLE, { .dbl = 0.0 }, 0, DBL_MAX, FLAGS },
{ NULL }
};
AVFILTER_DEFINE_CLASS(hqdn3d);
static const AVFilterPad avfilter_vf_hqdn3d_inputs[] = {
{
.name = "default",
.type = AVMEDIA_TYPE_VIDEO,
.config_props = config_input,
.filter_frame = filter_frame,
},
{ NULL }
};
static const AVFilterPad avfilter_vf_hqdn3d_outputs[] = {
{
.name = "default",
.type = AVMEDIA_TYPE_VIDEO
},
{ NULL }
};
AVFilter ff_vf_hqdn3d = {
.name = "hqdn3d",
.description = NULL_IF_CONFIG_SMALL("Apply a High Quality 3D Denoiser."),
.priv_size = sizeof(HQDN3DContext),
.priv_class = &hqdn3d_class,
.init = init,
.uninit = uninit,
.query_formats = query_formats,
.inputs = avfilter_vf_hqdn3d_inputs,
.outputs = avfilter_vf_hqdn3d_outputs,
.flags = AVFILTER_FLAG_SUPPORT_TIMELINE_INTERNAL | AVFILTER_FLAG_SLICE_THREADS,
.process_command = process_command,
};