UART、IIC、SPI、CAN四种通信协议对比
| 通信方式 | 传输线 | 通讯方式 | 标准传输速度 | 使用场景 |
|---|---|---|---|---|
| UART | TX(发送数据线)、RX(接收数据线) | 串行、异步、全双工 | 115.2 kbit/s(常用) | 计算机和外部设备通信(打印机) |
| IIC | SCL(时钟线)、SDA(数据线) | 串行、同步、半双工 | 100 kbit/s(标准模式) | 低速设备(传感器) |
| SPI | CS(片选)、MOSI(主发从收)、 MISO(从发主收)、CLK(时钟) | 串行、同步、全双工 | 无官方标准(50Mbps) | 高速数据传输(显示器) |
| CAN | CAN_High、CAN_Low | 串行、异步、半双工 | 4kbit/s~1mbit/s | 汽车、工业控制 |
个人理解,简单说一下这四种通讯方式的区别
- UART:简单方便,只需要TX、RX线两两相连,即可通讯。缺点是只能供两个设备之间通讯,假如想实现三个设备之间的通讯,UART就不能用了。
- IIC:多设备通讯,相较于UART两个设备之间的通讯,IIC可以实现多个设备之间的通信,通讯时一般是一个主设备,多个从设备,主设备用来控制通讯的开始和中断,需要发送地址位来确定与哪个设备建立通讯,同时为了保证通信正确传输到从机,每次需要从机应答,才会继续传输,这导致通讯速率较低。
- SPI:速度快,使用四根线完成通信,使用CS片选线选择通讯的对象。相较于IIC,无需发送通讯地址,也不需要从机发送应答信号,这就能大大提升通讯效率,但是缺点是占用4条线,消耗的资源比IIC多。
- CAN:安全第一,为了保证传输的安全性,相较于前面三种方法,使用了大量的手段保证数据及时、准确的传输。同时使用识别码,解决总线冲突的问题。这保证的优先级高的设备,先通讯。这也是为什么CAN能够用于工业、汽车等需要安全性高的领域。
一. UART
简介:Universal Asynchronous Receiver Transmitter 即通用异步收发器,是一种通用的串行、异步通信总线该总线有两条数据线,可以实现全双工的发送。在嵌入式系统中常用于主机与辅助设备之间的通信。
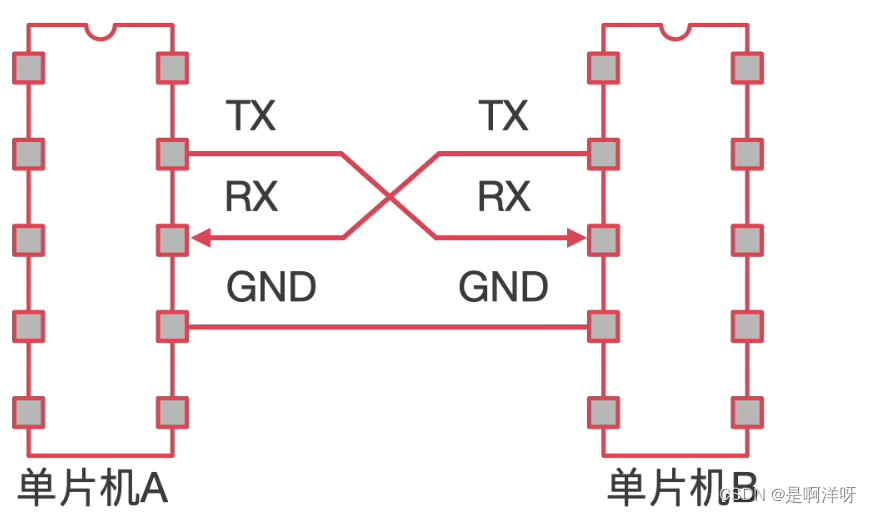
硬件连接:
UART只能是两个设备之间的通信,两个设备的发送器和接收器的TX和RX两两相连即可。
帧格式:
- 起始位:用一位逻辑0表示帧的开始
- 数据位:可以有5~8位
- 校验位:采用奇校验或偶校验的方式,用来检错,如果检测出错误,可以让发送设备重发
- 停止位,用1~2位的逻辑1表示帧的结束

值得一提的是,UART只是一种通信协议,需要发送器和接收器提前约定好帧格式和通信速率、奇偶校验、每帧数据位数,才能正常通讯。其电器属性,UART并没有规定,为了完善通讯协议,后面又对UART做了完善,现在普遍使用RS232和RS485两种协议。
- RS232:
电器特性:逻辑“1”为-5V ~-15V,逻辑“0”为+5V~+15V。
传输距离:传送距离一般可达15m。 - RS485:
电器特性:采用差分信号做数据传输,逻辑“1”为+2V ~+6V,逻辑“0”为-2V~-6V。
传输距离:0传送距离一般可达1500m。

二、IIC
简介:IIC(Inter-Integrated Circuit)是一种常用的串行通信总线协议,也被称为I2C(Inter-IC)总线。它由飞利浦(Philips)公司在20世纪80年代开发,并成为一种广泛应用于数字集成电路之间的通信标准,相较于UART,IIC可以组成一个网络,实现多个设备之间的通讯。
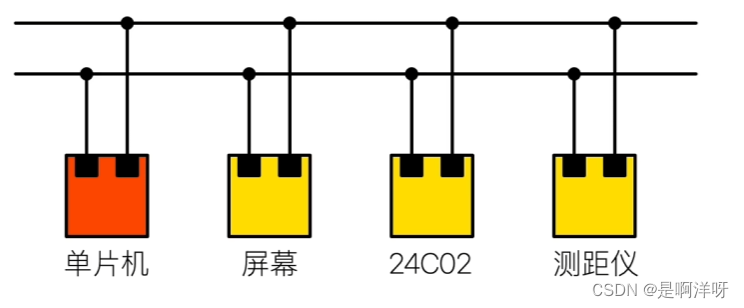
硬件链接:
每个通讯设备分别使用两根线,SCL(时钟线)、SDA(信号线)挂载在IIC总线上,挂载方式如下。
帧格式
- 起始信号:SCL为高电平时,SDA从高电平到低电平的变化表示帧起始。
- 设备地址:用7位逻辑信号,表示从设备的地址码,每个从设备的地址码唯一。
- 读写数据位:写数据置为0,读数据置为1。
- 应答信号:从机发给主机的应答信号,如果从机成功接收到主机发送的信号,发送0。没有收到发送1。
- 传输数据:传输数据8个时钟周期为一组,也就是一个字节,每发送一个字节,需要接受方发送一次应答信号,表示数据成功接收或失败。
- 终止信号:SCL为高电平时,SDA从低电平到高电平的变化表示帧起始。

三、SPI
简介:SPI(Serial Peripheral Interface,串行外设接口) 是串行外设接口的缩写,SPI是一种高速、全双工、同步的串行通信总线;采用主从方式工作,一般一个主设备,多个从设备;SPI需要四根线,分别是MISO(主输入从输出)、MOSI(主输出从输入)、SCLK(时钟)、CS(片选)。
硬件连接: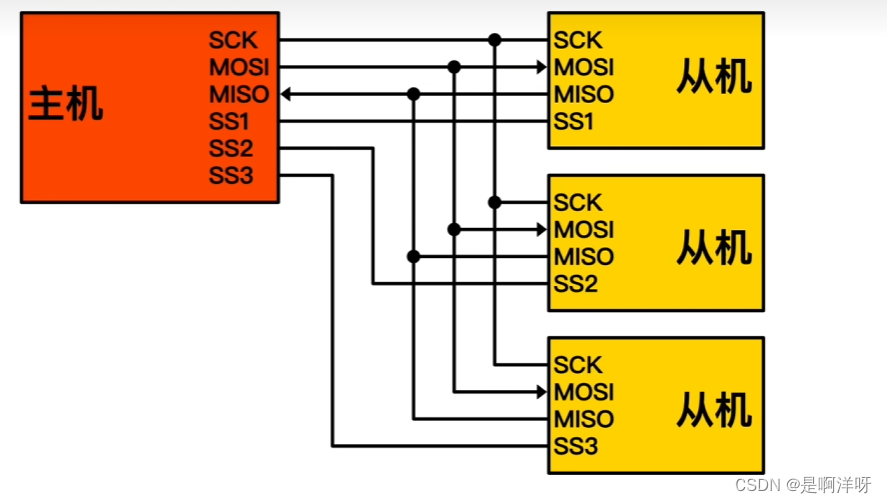
帧格式
SPI与其他通信方式不同,因为有片选线,所以并不需要有地址位,起始位、结束位等,没有一帧这个概念。只需要数据线和时钟线配合,即可完成通讯。
一个字节传送完成后,无需应答,即可开始下一个字节的传送;采用同步方式工作,时钟线在上升沿或下降沿时,发送器向数据线上发送数据,在紧接的下降沿会上升沿读取数据,八个时钟即可完成一个字节的数据传送。无需接收方应答。

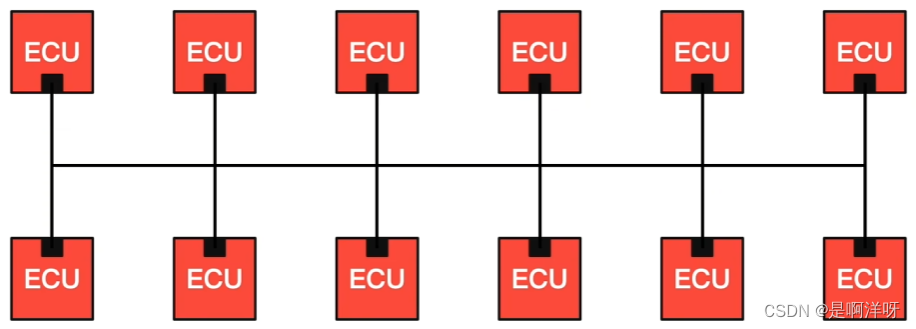
四、CAN
CAN(Controller Area Network Bus)控制器局域网总线,最主要应用与汽车和工业控制领域,实现多个ECU之间的相互通信,使用差分信号进行通讯。两条线压差为0V表示逻辑1,压差2V表示逻辑0
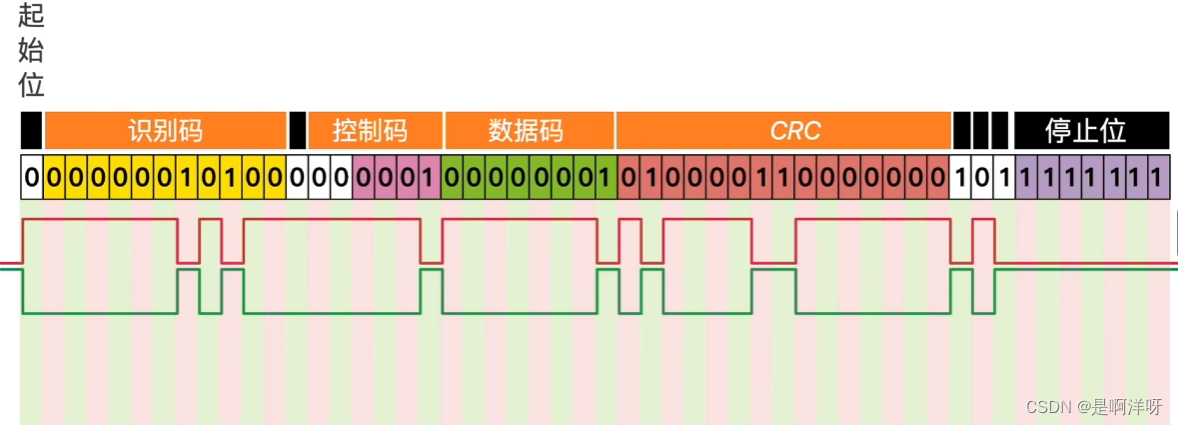
帧格式
- 起始位:用1位逻辑0表示帧的开始
- 识别码:每一个设备都有属于自己的11位识别码,用于确认发送设备的身份。识别码不光用来确认身份,还可以用来决定发送的优先级,举个例字:如果两个信号同时占用总线,那么会产生冲突,这时,识别码就起作用了,识别码位数高的,会优先发送,识别码低的停止发送信号
- 控制码:第一位是IDE位,用来决定是否使用扩展帧,后四位是DLC位,用四位二进制来表示数据码的长度,比如DLC为“0001”,表示数据码长度为1个字节;DLC为“0011”,则表示数据码长度为3个字节。所以数据码的长度为1~8个字节
- 数据码:用来传输数据,数据码的范围为长度为1~8个字节
- CRC位:15位CRC循环冗余码,用来纠错,如果错了,从新发送数据
- ACK确认槽,接收端发送信号,表示接收到数据了
- 结束位,用7位逻辑1表示帧的结束
资料来源:
1.爱上半导体
2.SPI、UART、RS232、RS485、IIC 5种嵌入式经典通信总线协议精讲