在自动化技术和工业控制领域,实时通信网络的重要性不断增长。EtherCAT(Ethernet for Control Automation Technology)作为一种高效的工业以太网通信协议,因其出色的性能和灵活性而广受欢迎。而实时Linux作为影响最为广泛的开源实时操作系统,提供了对EtherCAT的支持,使其在需要严格实时性的应用中表现优异。
EtherCAT是基于以太网技术的工业自动化协议,它通过在以太网帧中直接携带数据,实现了快速的数据交换,大大减少了通信延迟。这种“在传递过程中处理”(processing on the fly)的方法使得EtherCAT在全球范围内被广泛应用于各种实时控制系统。而实时Linux通过增强的内核调度器、改进的中断处理和时间管理等技术,提供了可预测的任务执行时间和响应。这些特性是实现高效实时控制的关键。实时Linux可以通过预补丁(PREEMPT_RT)来改造标准Linux内核,使其具备实时操作系统的特性。
在实时Linux上实现EtherCAT工业自动化协议
EtherCAT的具体实现并不依赖于某个操作系统,然而,在实时Linux上实现EtherCAT有着显著的优势:实时Linux通过其实时特性保证了数据处理的及时性和准确性,这对于EtherCAT协议中的快速数据交换至关重要。实时Linux提供了稳定的时间同步,而EtherCAT要求严格的时间同步以保证控制的精确性。实时Linux提供了精确的时钟管理功能,支持了EtherCAT对时间同步的需求。Linux内核是世界上对硬件支持最丰富和最好的操作系统,多个开源项目如IgH EtherCAT Master为实时Linux提供了EtherCAT通信的驱动支持。这些驱动集成进了Linux内核,允许开发者轻松实现EtherCAT的功能。
在许多工业自动化项目中,实时Linux结合EtherCAT已经证明了其有效性。例如,在自动化装配线、机器人控制和复杂的制造系统中,实时Linux和EtherCAT的结合提供了低延迟、高可靠性的解决方案。
例如,韩国科学技术研究所在实时Linux的基础上,通过EtherCAT实现了对机器人等工业设备的控制[1]

图1. 在实时Linux上的开源EtherCAT协议栈实现对工业设备的控制
韩国研究者采用软件定义的方法,简化EtherCAT从站(EtherCAT Slave)的集成,并通过基于开源EtherCAT主站(EtherCAT Master)的API在配置界面中暴露所需参数。同时考虑到任务同步,还提供了一个针对硬实时多任务环境的实时变种POSIX库。此外,实时发布-订阅协议也被用于确保与EtherCAT网络外的设备的无缝通信。为了验证可行性,他们还进行了涉及多轴机器人控制和实时性能分析的实际示例。
而意大利的研究者在早先对在实时Linux上实施EtherCAT协议进行了详尽的性能分析[2]。
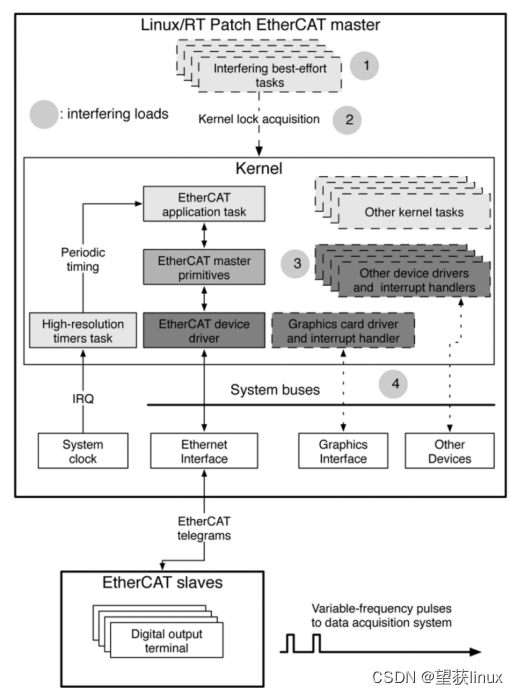
图2. 在实时Linux上的EtherCAT实现 - 性能分析
图2是意大利研究者设计并实现的性能分析构架。[2]的性能分析表明:对于大多数类型的干扰负载,基于RT补丁的实时Linux能够满足周期性任务的严格实时要求,支持最低达到250微秒的周期,并且抖动非常有限,大约在13微秒的数量级。此外,通过长达约24小时的长期测量,这些有利的特性得到了确认,从而增强了对实时Linux与EtherCAT相结合在现实工业领域应用的信心。
实时Linux对EtherCAT的更好支持
研究与实践表明:实时Linux与EtherCAT相结合能够在自动化技术和工业控制领域良好应用。为实现实时Linux对EtherCAT的更好支持,需要从一下方面进行进一步优化:
EtherCAT实时通信对网络配置有严格要求。应优化Linux的网络堆栈,确保数据包的优先处理,减少网络延迟。这包括调整网络接口卡(NIC)的中断处理、使用实时网络调度策略等。国科环宇的基于DPDK+VIRTIO的网络路径优化方案,能够有效缩短网络路径,提高EtherCAT网络通讯的实时性。
进行系统级的优化,如关闭不必要的服务和守护进程,以减少系统负载和中断。调整CPU亲和性(CPU affinity)和实时优先级,确保关键任务获得足够的CPU资源。
实现高效的任务调度机制和时间同步,确保任务按照预定的时间准确执行。可以使用如PTP(Precision Time Protocol)这样的协议来实现网络中设备的精确时间同步。
进行长时间的运行和压力测试以验证系统的稳定性和实时性能。这些测试应模拟真实的运行条件和可能的极端情况,确保系统在不同的操作环境下都能保持稳定和高效。国科环宇提供了一套成熟的性能毛刺监控方案,能够全面高效稳定地定位和消除性能毛刺,显著提高实时Linux系统对EtherCAT的支持,从而满足工业自动化和控制应用中的高性能和实时性需求。
参考文献
[1] Design and Analysis of a Real-Time Control Architecture Towards Software-Defined EtherCAT Devices. IECON 2023- 49th Annual Conference of the IEEE Industrial Electronics Society.
[2] Performance of a Real-Time EtherCAT Master Under Linux. November 2011IEEE Transactions on Industrial Informatics 7(4):679-687