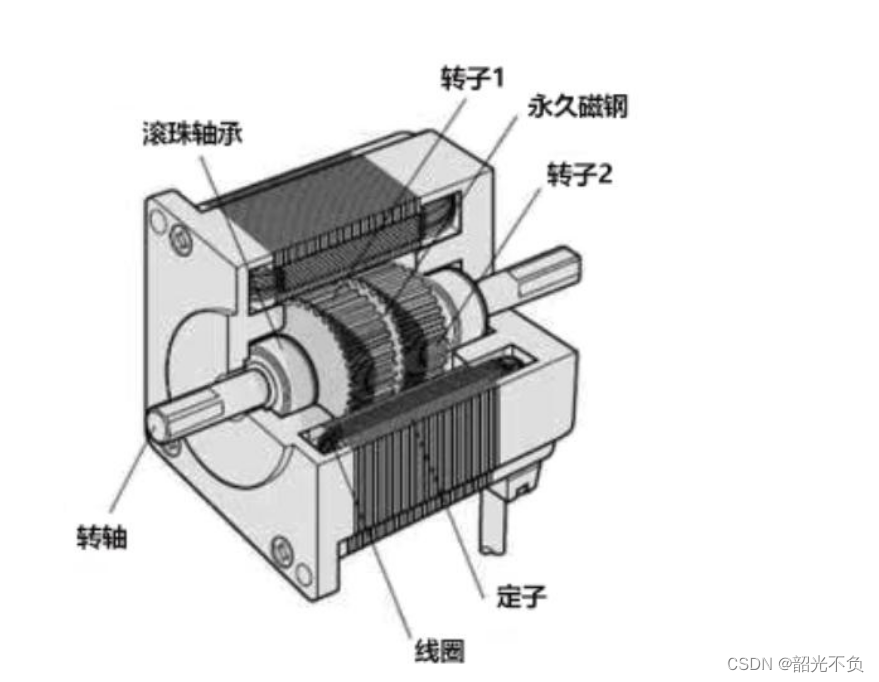
什么是电机?
电机是一种将电能转换为机械能的装置,通常由定子、转子和电磁场组成。当电流通过电机的绕组时,产生的磁场会与电机中的磁场相互作用,从而使电机产生旋转运动。电机广泛应用于各种机械设备和工业生产中,是现代社会不可或缺的重要设备之一。常见的电机种类包括直流电机、交流电机、步进电机、伺服电机等。
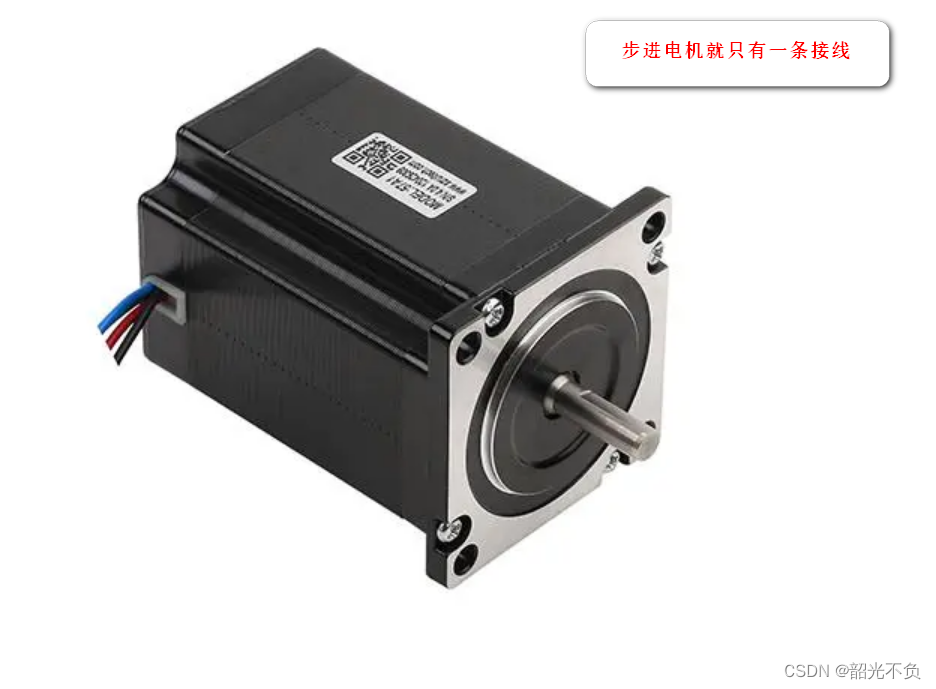
1,步进电机与伺服电机的外观区别(步进只有一个输出线,伺服有二个输出线)
步进电机(步进只有一个输出线)
伺服电机 (伺服有二个输出线,需要编码器所以还需要一个输出线)

2,步进电机与伺服电机的精度区别(伺服电机精度>步进电机精度)
-
步进电机的精度主要取决于步距角度,通常可以精准控制到每个步距角度,但无法实时监测位置误差并进行修正,因此在长时间运行或复杂应用中可能存在积累误差的情况。(步进开环控制,没有反馈信号)
-
伺服电机通过反馈装置(如编码器)实时监测位置、速度等参数,并根据反馈信号动态调整控制信号,从而实现更精确的位置控制。这使得伺服电机在精确性方面优于步进电机,可以更好地适应复杂且高要求的控制场景。(伺服闭环控制,有反馈信号)
因此,如果应用场景对于精度要求较高,尤其是在动态调整和跟踪位置的情况下,伺服电机通常是更佳的选择。而如果主要需要简单的位置定位,步进电机也可以胜任。
3,低频特性
步进电机的低频特性通常指的是在低速运行时的性能表现。步进电机由于其固定的步距角度,通常在低速运行时具有较高的定位精度和稳定性。在低频率下,步进电机可以准确控制每个步距角度的移动,因此在一些需要进行精确位置定位和低速运行的应用中表现优异。然而,步进电机在低速运行时可能会出现共振现象,造成震动和不稳定性,因此需要通过相关控制措施或调节参数来克服这一问题。通过优化步进电机的控制算法和调整驱动器参数,可以提高其在低频率下的性能表现,满足更高要求的应用需求。
伺服电机在低频特性方面通常具有更好的性能表现。通过反馈装置(如编码器)实时监测位置、速度等参数,并根据反馈信号动态调整控制信号,伺服电机可以更精确地控制低速运行时的位置和速度。因此,在低频率下,伺服电机通常表现稳定且精准,适用于需要进行高精度、低速运行的应用场景。此外,伺服电机通常具有更高的响应速度和动态性能,能够更快地调整和跟踪位置,从而提高系统的控制性能和稳定性。综合来看,伺服电机在低频特性方面通常优于步进电机,特别适用于对低速运行性能和精度要求较高的应用领域。
4,矩频特性

从图中可以发现,当伺服电机在3000转之前的转矩都是保持恒定的,说明伺服电机在额定功率范围内,不会转速增加而转速下降。
步进电机在额定功率范围内,会转速增加而转速下降。
5,过载能力(伺服电机有3倍过载能力)
步进电机与伺服电机的过载能力也是它们在实际应用中的一个重要比较指标。一般来说,伺服电机具有更高的过载能力,即在瞬时负载增加时能够快速调整并保持稳定运行。这是因为伺服电机可以随时根据反馈信号进行实时调整,从而更好地应对突发负载变化。
相比之下,步进电机的过载能力通常较低。由于步进电机的固定步距角度以及开环控制模式的限制,步进电机在面对负载变化时可能无法及时进行调整,容易出现失步现象或无法正确控制位置。因此,在对于需要承受大负载波动或瞬间过载的应用中,伺服电机更加适用,能够更好地保证系统的稳定性和安全性。
伺服电机在过载能力方面通常优于步进电机,特别适用于对负载波动响应要求高的应用场景。选择合适的电机类型需要综合考虑其过载能力、精度要求、成本等因素,以确保系统性能和稳定性。
5,控制系统不同
伺服电机闭环控制:
伺服电机闭环控制是指在伺服系统中通过反馈信号实时监测电机位置、速度等参数,并根据反馈信号对电机进行动态控制的方式。闭环控制能够实现更高的精度和稳定性,有助于提高系统的动态性能和抗干扰能力。在伺服电机闭环控制中,通常会使用编码器等反馈装置来实时监测位置和速度,并通过控制器根据反馈信号计算误差并调整控制信号,使系统实现准确的位置跟踪和速度控制。闭环控制可以有效弥补开环控制中的误差和不确定性,提高系统的稳定性和精度。综合来看,伺服电机闭环控制能够更好地满足高精度、高动态响应要求的应用需求,是现代自动控制系统中常用的控制方式之一。
步进电机开环控制:
步进电机通常采用的是开环控制方式,即在控制电机时不使用位置反馈信息。开环控制方式相对简单,操作方便,并且通常具有较低的成本。然而,由于步进电机是根据控制信号依次执行步进运动,没有反馈机制来检测位置和速度,因此在负载变化或系统干扰下容易出现失步现象,影响系统的定位精度和稳定性。
在一些对精度要求不高、成本敏感的应用场景中,步进电机的开环控制可以满足基本需求。但在对系统稳定性、精度和动态性能要求较高的应用中,通常会选择采用闭环控制的伺服电机来实现更精确的位置和速度控制。
6,响应速度不同
步进电机响应速度一般在200~400ms
伺服电机响应速度几毫秒
7,价格(步进价格<伺服价格)