全部学习汇总: GreyZhang/g_TC275: happy hacking for TC275! (github.com)
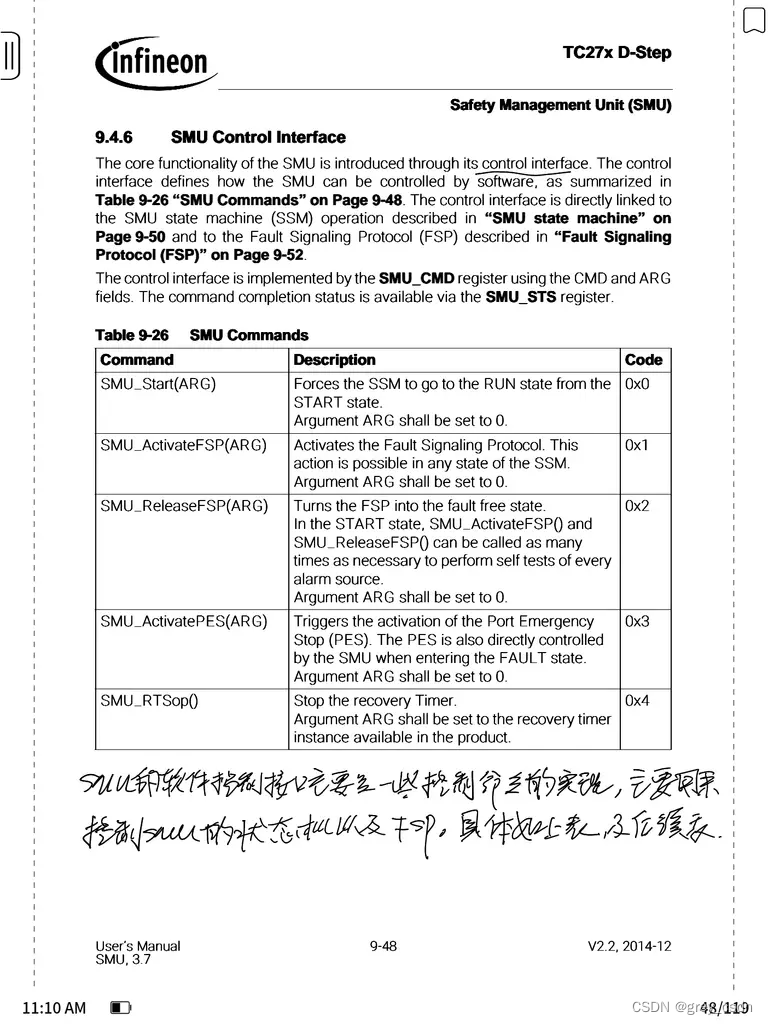
SMU的软件控制接口主要是实现了一些控制命令,用于控制SMU的状态机以及FSP。具体的内容在上面的一部分表格以及接下来的一页中的表格中有介绍。
- 涉及到ed命令,用几个关键词来总结的话有使能、激活功能、释放故障、请求触发等。
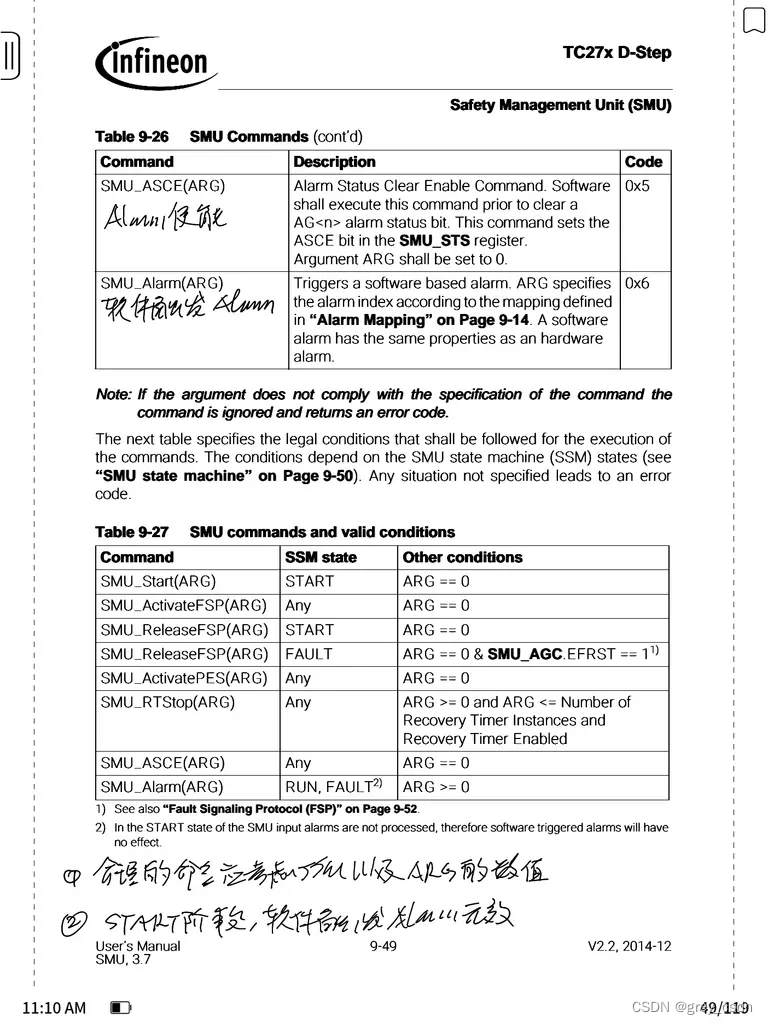
- 合理的命令应该考虑SMU的状态机SSM以及ARG的数值。
- START阶段,软件可以触发的故障请求是无效的。
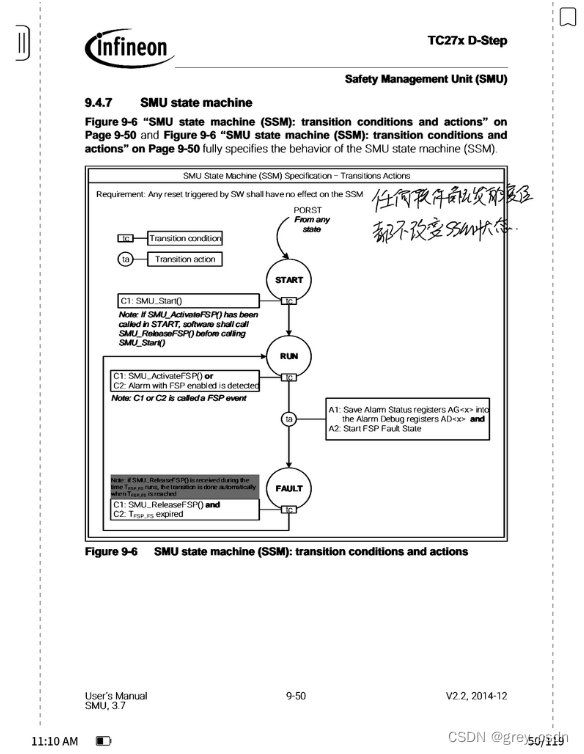
任何软件出发点额复位都不能够改变SSM的状态,这个在一定程度上能够看出SMU的故障状态维持能力。
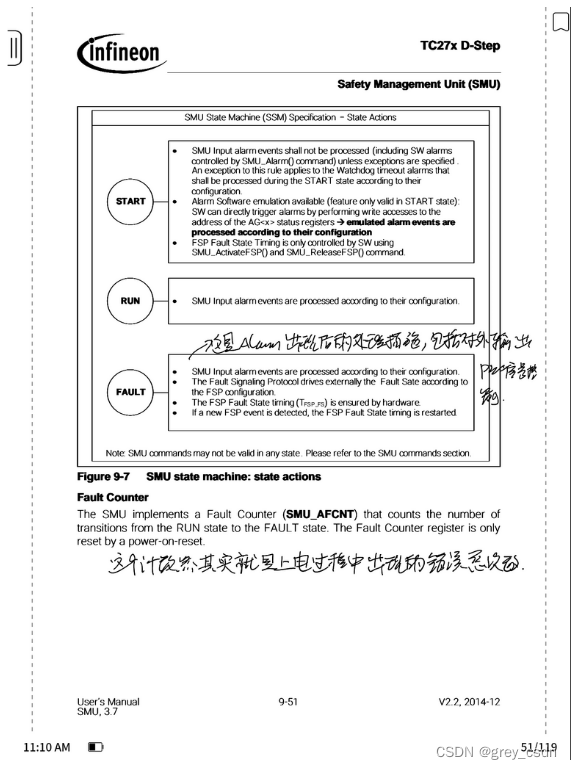
- SMU处于故障状态的时候其实是执行故障处理措施的一个阶段,包括对外输出信号在内的故障处理以及提示都是在这个阶段处理的。
- SMU有一个错误计数器,少先队额其实是这一次上电过程中出现的额错误总数。
- FSP拥有的几种状态:上电复位、无故障状态、有故障状态。
- 对于FSP的控制有几种方法:软件命令、基于寄存器的硬件自动相应、故障查询。
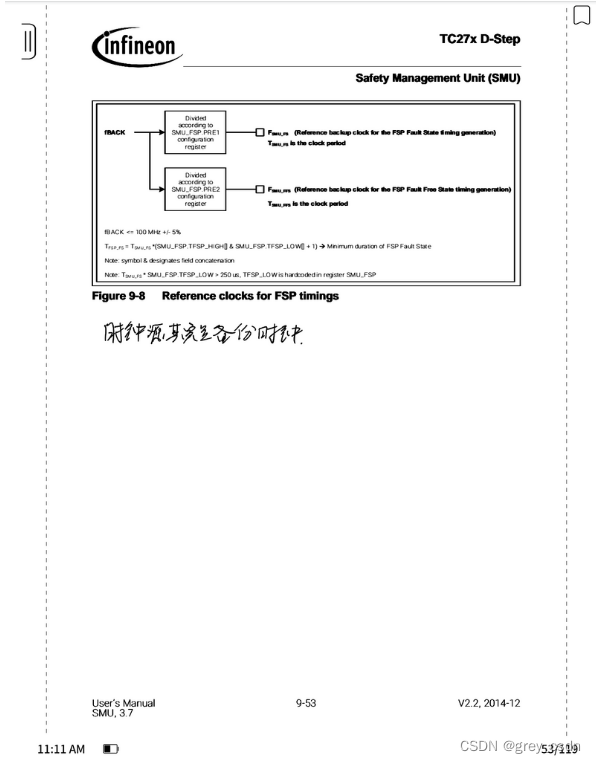
从这个图可以看得出来,FSP的时钟源其实是来自于MCU的备份时钟。
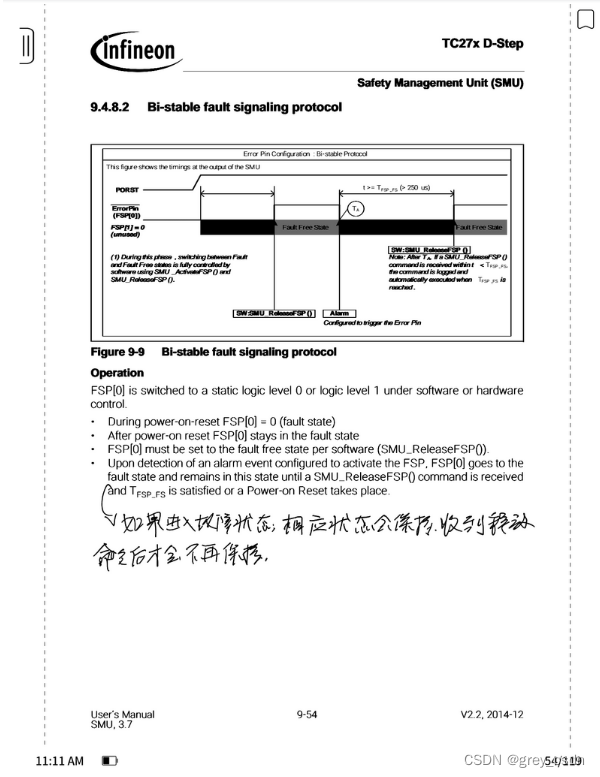
如果进入了故障状态,相应的状态会保持,只到收到释放度额命令之后才会停止保持。
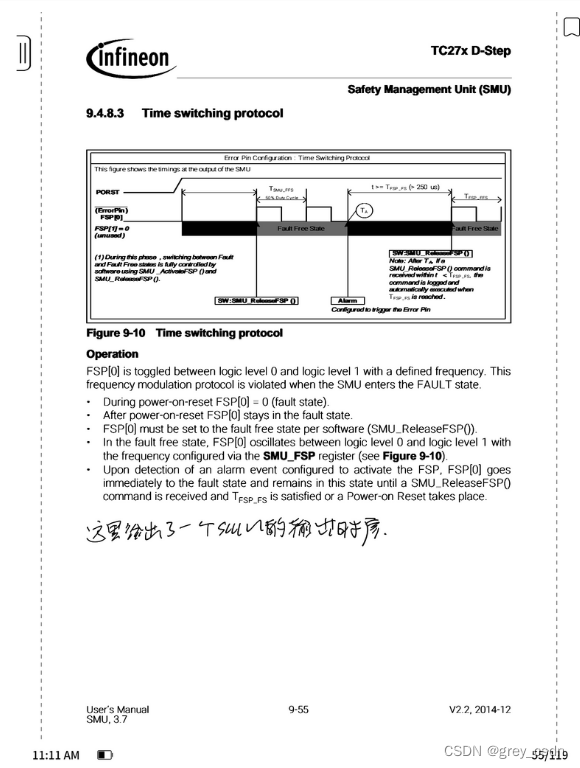
这里给出了一个SMU的输出时序。
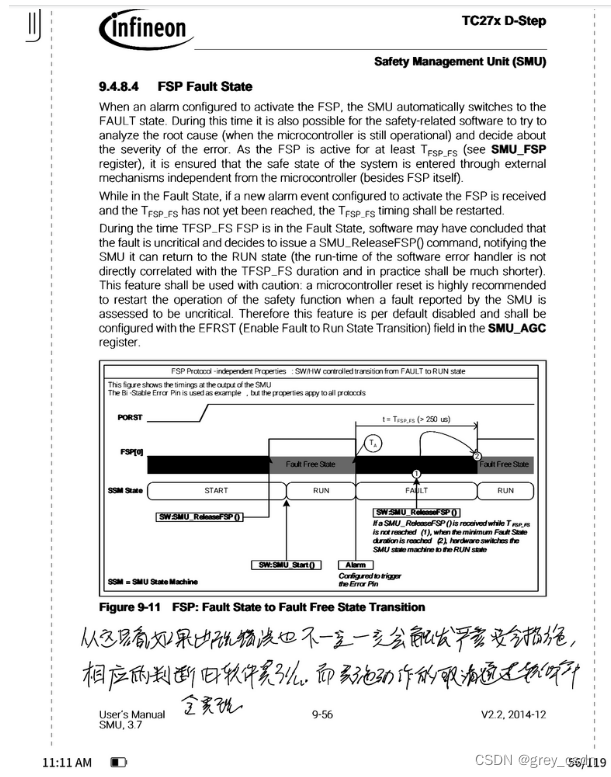
从这一页可以看出,如果时出现了错误也不见得一定会触发严重的安全措施。相应的措施执行其实是经过了软件判断,当判断出来对应的故障不严重的时候可以释放掉触发的故障状态。
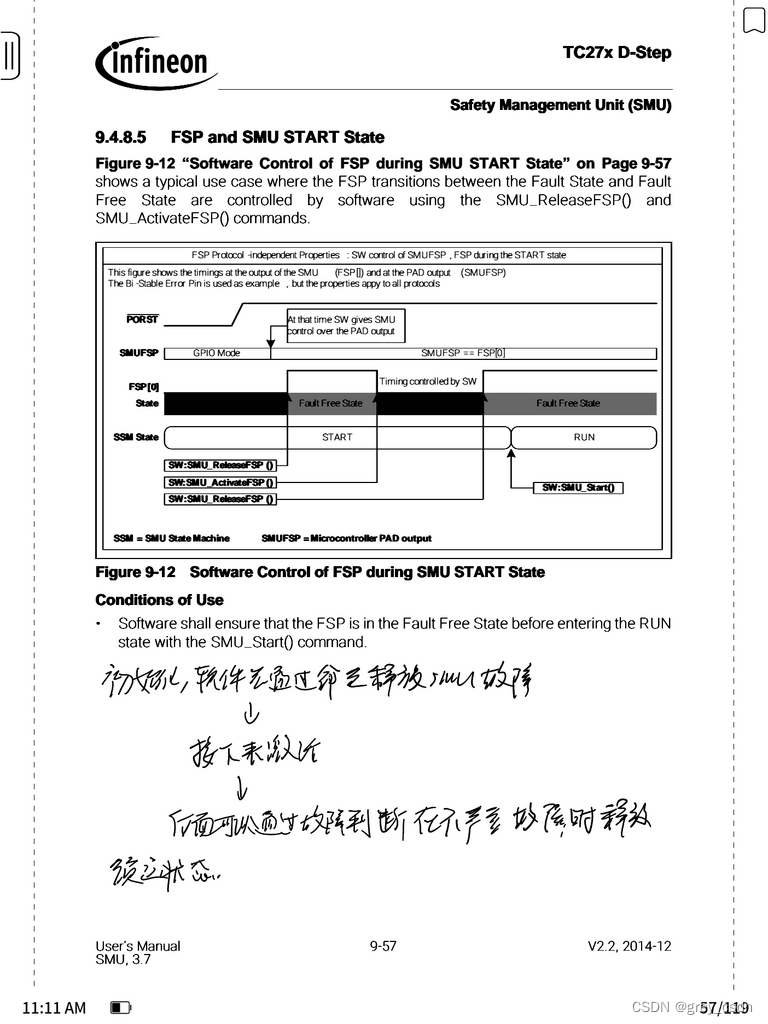
SMU启动的过程中,软件对于FSP的处理:首先是先进行故障的释放,接下来激活故障诊断判断的功能,最后可以通过故障判断在不严重的时候释放故障状态。





![[oeasy]python0048_取整_int_float_浮点型_cast_扮演_tab_制表键_制表符](https://img-blog.csdnimg.cn/img_convert/ce5ec2ce028879451d52c499881ec131.png)