文章目录
- 【 1. DFS 深度优先搜索 】
-
- 【 2. BFS 广度优先搜索 】
-
- 【 3. 深度优先生成树、广度优先生成树 】
- 【 4. 深度优先生成森林、广度优先生成森林 】
-
- 对存储的图中的顶点进行遍历搜索,常用的遍历方式有两种:深度优先搜索和广度优先搜索。
【 1. DFS 深度优先搜索 】
1.1 基本原理
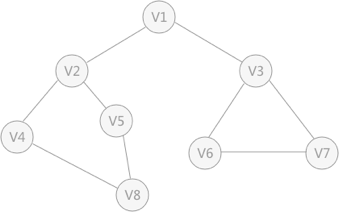
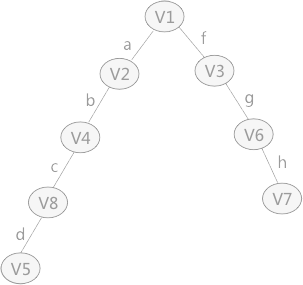
- 深度优先搜索的过程 类似于树的先序遍历,首先从例子中体会深度优先搜索。例如下图是一个无向图,采用深度优先算法遍历这个图的过程为:
- 首先任意找一个未被遍历过的顶点,例如从 V1 开始,由于 V1 率先访问过了,所以,需要标记 V1 的状态为访问过;
- 然后遍历 V1 的邻接点,例如访问 V2 ,并做标记,然后访问 V2 的邻接点,例如 V4 (做标记),然后 V8 ,然后 V5 ;
- 当继续遍历 V5 的邻接点时,根据之前做的标记显示,所有V5 的邻接点都被访问过了。此时,从 V5 回退到 V8 ,看 V8 是否有未被访问过的邻接点,如果没有,继续回退到 V4 , V2 ,V1 ;
- 通过查看 V1 ,找到一个未被访问过的顶点 V3 ,继续遍历,然后访问 V3 邻接点 V6 ,然后 V7 ;
- 由于 V7 没有未被访问的邻接点,所以回退到 V6 ,继续回退至 V3 ,最后到达 V1 ,发现没有未被访问的;
- 最后一步需要判断是否所有顶点都被访问,如果还有没被访问的,以未被访问的顶点为第一个顶点,继续依照上边的方式进行遍历。
- 根据上边的过程,可以得到下图通过深度优先搜索获得的顶点的遍历次序为:
V1、V2、V4、V8、 V5、V3、V6、V7
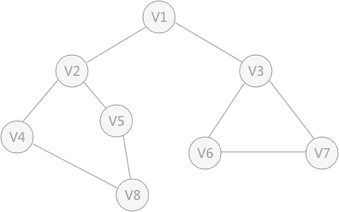
- 总结:深度优先搜索,是从图中的一个顶点出发,每次遍历当前访问顶点的临接点,一直到访问的顶点没有未被访问过的临接点为止。然后采用依次回退的方式(深度优先搜索是一个不断回溯的过程),查看来的路上每一个顶点是否有其它未被访问的临接点。访问完成后,判断图中的顶点是否已经全部遍历完成,如果没有,以未访问的顶点为起始点,重复上述过程。
1.2 C 实现
#define _CRT_SECURE_NO_WARNINGS 1
#include <stdio.h>
#define MAX_VERtEX_NUM 20
#define VertexType int
#define VRType int
#define InfoType char
bool visited[MAX_VERtEX_NUM];
typedef struct {
VRType adj;
InfoType* info;
}ArcCell,AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM];
typedef struct {
VertexType vexs[MAX_VERtEX_NUM];
AdjMatrix arcs;
int vexnum, arcnum;
}MGraph;
int LocateVex(MGraph* G, VertexType v) {
int i = 0;
for (; i < G->vexnum; i++) {
if (G->vexs[i] == v) {
break;
}
}
if (i > G->vexnum) {
printf("no such vertex.\n");
return -1;
}
return i;
}
void CreateDN(MGraph* G) {
scanf("%d,%d", &(G->vexnum), &(G->arcnum));
for (int i = 0; i < G->vexnum; i++) {
scanf("%d", &(G->vexs[i]));
}
for (int i = 0; i < G->vexnum; i++) {
for (int j = 0; j < G->vexnum; j++) {
G->arcs[i][j].adj = 0;
G->arcs[i][j].info = NULL;
}
}
for (int i = 0; i < G->arcnum; i++) {
int v1, v2;
scanf("%d,%d", &v1, &v2);
int n = LocateVex(G, v1);
int m = LocateVex(G, v2);
if (m == -1 || n == -1) {
printf("no this vertex\n");
return;
}
G->arcs[n][m].adj = 1;
G->arcs[m][n].adj = 1;
}
}
int FirstAdjVex(MGraph G, int v)
{
for (int i = 0; i < G.vexnum; i++) {
if (G.arcs[v][i].adj) {
return i;
}
}
return -1;
}
int NextAdjVex(MGraph G, int v, int w)
{
for (int i = w + 1; i < G.vexnum; i++) {
if (G.arcs[v][i].adj) {
return i;
}
}
return -1;
}
void visitVex(MGraph G, int v) {
printf("%d ", G.vexs[v]);
}
void DFS(MGraph G, int v) {
visited[v] = true;
visitVex(G, v);
for (int w = FirstAdjVex(G, v); w >= 0; w = NextAdjVex(G, v, w)) {
if (!visited[w]){
DFS(G, w);
}
}
}
void DFSTraverse(MGraph G)
{
int v;
for (v = 0; v < G.vexnum; ++v) {
visited[v] = false;
}
for (v = 0; v < G.vexnum; v++) {
if (!visited[v]) {
DFS(G, v);
}
}
}
int main() {
MGraph G;
CreateDN(&G);
DFSTraverse(G);
return 0;
}
- 使用上述程序存储下图的无向图时,输入如下数据,得到DFS的输出结果:
8,9
1
2
3
4
5
6
7
8
1,2
2,4
2,5
4,8
5,8
1,3
3,6
6,7
7,3
【 2. BFS 广度优先搜索 】
2.1 基本原理
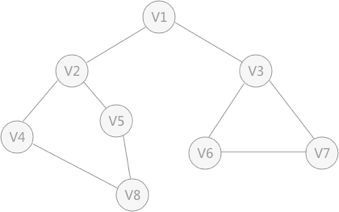
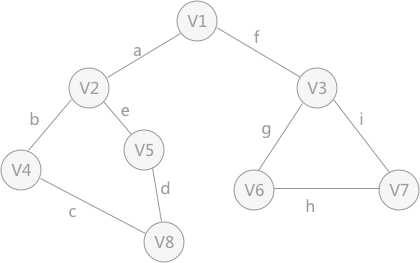
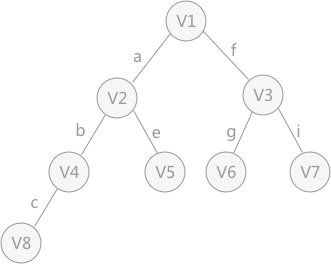
- 广度优先搜索 类似于树的层次遍历。以下图的无向图为例,假设 V1 作为起始点,遍历其所有的邻接点 V2 和 V3 ,以 V2 为起始点,访问邻接点 V4 和 V5 ,以 V3 为起始点,访问邻接点 V6 、 V7 ,以 V4 为起始点访问 V8 ,以 V5 为起始点,由于 V5 所有的起始点已经全部被访问,所有直接略过, V6 和 V7 也是如此。
以 V1 为起始点的遍历过程结束后,判断图中是否还有未被访问的点,由于图 1 中没有了,所以整个图遍历结束。遍历顶点的顺序为:
V1、 V2、 v3、V4、 V5、 V6、 V7、 V8
- 总结:广度优先搜索,是从图中的某一顶点出发,遍历每一个顶点时,依次遍历其所有的邻接点,然后再从这些邻接点出发,同样依次访问它们的邻接点。按照此过程,直到图中所有被访问过的顶点的邻接点都被访问到。最后还需要做的操作就是查看图中是否存在尚未被访问的顶点,若有,则以该顶点为起始点,重复上述遍历的过程。
2.2 C 实现
- 广度优先搜索的实现需要借助 队列 这一特殊数据结构,实现代码为:
#define _CRT_SECURE_NO_WARNINGS 1
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERtEX_NUM 20
#define VertexType int
#define VRType int
#define InfoType char
bool visited[MAX_VERtEX_NUM];
typedef struct Queue {
VertexType data;
struct Queue* next;
}Queue;
typedef struct {
VRType adj;
InfoType* info;
}ArcCell, AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM];
typedef struct {
VertexType vexs[MAX_VERtEX_NUM];
AdjMatrix arcs;
int vexnum, arcnum;
}MGraph;
int LocateVex(MGraph* G, VertexType v) {
int i = 0;
for (; i < G->vexnum; i++) {
if (G->vexs[i] == v) {
break;
}
}
if (i > G->vexnum) {
printf("no such vertex.\n");
return -1;
}
return i;
}
void CreateDN(MGraph* G) {
scanf("%d,%d", &(G->vexnum), &(G->arcnum));
for (int i = 0; i < G->vexnum; i++) {
scanf("%d", &(G->vexs[i]));
}
for (int i = 0; i < G->vexnum; i++) {
for (int j = 0; j < G->vexnum; j++) {
G->arcs[i][j].adj = 0;
G->arcs[i][j].info = NULL;
}
}
for (int i = 0; i < G->arcnum; i++) {
int v1, v2;
scanf("%d,%d", &v1, &v2);
int n = LocateVex(G, v1);
int m = LocateVex(G, v2);
if (m == -1 || n == -1) {
printf("no this vertex\n");
return;
}
G->arcs[n][m].adj = 1;
G->arcs[m][n].adj = 1;
}
}
int FirstAdjVex(MGraph G, int v)
{
for (int i = 0; i < G.vexnum; i++) {
if (G.arcs[v][i].adj) {
return i;
}
}
return -1;
}
int NextAdjVex(MGraph G, int v, int w)
{
for (int i = w + 1; i < G.vexnum; i++) {
if (G.arcs[v][i].adj) {
return i;
}
}
return -1;
}
void visitVex(MGraph G, int v) {
printf("%d ", G.vexs[v]);
}
void InitQueue(Queue** Q) {
(*Q) = (Queue*)malloc(sizeof(Queue));
(*Q)->next = NULL;
}
void EnQueue(Queue** Q, VertexType v) {
Queue* element = (Queue*)malloc(sizeof(Queue));
element->data = v;
element->next = NULL;
Queue* temp = (*Q);
while (temp->next != NULL){
temp = temp->next;
}
temp->next = element;
}
void DeQueue(Queue** Q, int* u) {
(*u) = (*Q)->next->data;
(*Q)->next = (*Q)->next->next;
}
bool QueueEmpty(Queue* Q) {
if (Q->next == NULL) {
return true;
}
return false;
}
void BFSTraverse(MGraph G) {
int v;
for (v = 0; v < G.vexnum; ++v) {
visited[v] = false;
}
Queue* Q;
InitQueue(&Q);
for (v = 0; v < G.vexnum; v++) {
if (!visited[v]) {
visited[v] = true;
visitVex(G,v);
EnQueue(&Q, G.vexs[v]);
while (!QueueEmpty(Q)) {
int u;
DeQueue(&Q, &u);
u = LocateVex(&G, u);
for (int w = FirstAdjVex(G,u); w >= 0; w = NextAdjVex(G, u, w)) {
if (!visited[w]) {
visited[w] = true;
visitVex(G, w);
EnQueue(&Q, G.vexs[w]);
}
}
}
}
}
}
int main() {
MGraph G;
CreateDN(&G);
BFSTraverse(G);
return 0;
}
- 使用上述程序存储下图的无向图时,输入如下数据,得到DFS的输出结果:
8,9
1
2
3
4
5
6
7
8
1,2
2,4
2,5
4,8
5,8
1,3
3,6
6,7
7,3
【 3. 深度优先生成树、广度优先生成树 】
- 无向图遍历过程中所经历过的图中的顶点和边的组合,就是图的生成树或者生成森林。
- 由深度优先搜索得到的树为 深度优先生成树。例如,当对上图的无向图使用深度优先搜索算法时,假设 V1 作为遍历的起始点,涉及到的顶点和边的遍历顺序为(不唯一):
V1、V2、V4、V8、V5、V3、V6、V7。
此种遍历顺序构建的生成树为:
- 同理,广度优先搜索生成的树为 广度优先生成树,对该无向图以顶点 V1 为起始点进行广度优先搜索遍历得到的树,如下图所示:
【 4. 深度优先生成森林、广度优先生成森林 】
- 前言回顾:详情见:【C 数据结构】图。
① 非连通图在进行遍历时,实则是对非连通图中每个连通分量分别进行遍历,在遍历过程经过的每个顶点和边,就构成了每个连通分量的生成树;
② 非连通图的多个连通分量构成的多个生成树为非连通图的生成森林。
4.1 深度优先生成森林
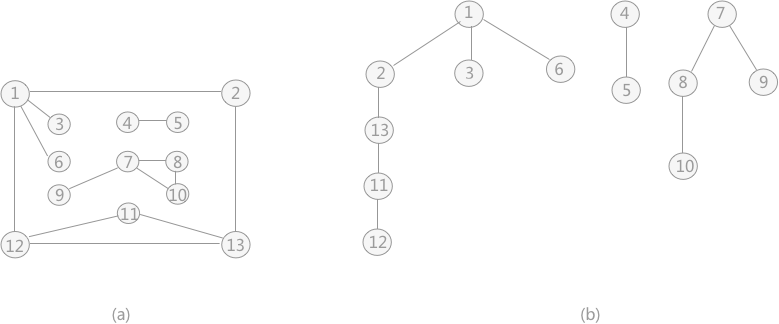
- 对下图 a 的非连通图采用深度优先搜索算法遍历时,得到的深度优先生成森林(由 3 个深度优先生成树构成)如下图 b 所示(不唯一)。
#define _CRT_SECURE_NO_WARNINGS 1
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERtEX_NUM 20
#define VertexType int
#define VRType int
bool visited[MAX_VERtEX_NUM];
typedef struct
{
VRType adj;
}ArcCell, AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM];
typedef struct {
VertexType vexs[MAX_VERtEX_NUM];
AdjMatrix arcs;
int vexnum, arcnum;
}MGraph;
typedef struct CSNode {
VertexType data;
struct CSNode* lchild;
struct CSNode* nextsibling;
}*CSTree, CSNode;
int LocateVex(MGraph G, VertexType v) {
int i = 0;
for (; i < G.vexnum; i++) {
if (G.vexs[i] == v) {
break;
}
}
if (i > G.vexnum) {
printf("no such vertex.\n");
return -1;
}
return i;
}
void CreateDN(MGraph* G) {
scanf("%d,%d", &(G->vexnum), &(G->arcnum));
getchar();
for (int i = 0; i < G->vexnum; i++) {
scanf("%d", &(G->vexs[i]));
}
for (int i = 0; i < G->vexnum; i++) {
for (int j = 0; j < G->vexnum; j++) {
G->arcs[i][j].adj = 0;
}
}
for (int i = 0; i < G->arcnum; i++) {
int v1, v2;
scanf("%d,%d", &v1, &v2);
int n = LocateVex(*G, v1);
int m = LocateVex(*G, v2);
if (m == -1 || n == -1) {
printf("no this vertex\n");
return;
}
G->arcs[n][m].adj = 1;
G->arcs[m][n].adj = 1;
}
}
int FirstAdjVex(MGraph G, int v)
{
for (int i = 0; i < G.vexnum; i++) {
if (G.arcs[v][i].adj) {
return i;
}
}
return -1;
}
int NextAdjVex(MGraph G, int v, int w)
{
for (int i = w + 1; i < G.vexnum; i++) {
if (G.arcs[v][i].adj) {
return i;
}
}
return -1;
}
void DFSTree(MGraph G, int v, CSTree* T) {
visited[v] = true;
bool first = true;
CSTree q = NULL;
for (int w = FirstAdjVex(G, v); w >= 0; w = NextAdjVex(G, v, w)) {
if (!visited[w]) {
CSTree p = (CSTree)malloc(sizeof(CSNode));
p->data = G.vexs[w];
p->lchild = NULL;
p->nextsibling = NULL;
if (first) {
(*T)->lchild = p;
first = false;
}
else {
q->nextsibling = p;
}
q = p;
DFSTree(G, w, &q);
}
}
}
void DFSForest(MGraph G, CSTree* T) {
(*T) = NULL;
for (int v = 0; v < G.vexnum; v++) {
visited[v] = false;
}
CSTree q = NULL;
for (int v = 0; v < G.vexnum; v++) {
if (!(visited[v])) {
CSTree p = (CSTree)malloc(sizeof(CSNode));
p->data = G.vexs[v];
p->lchild = NULL;
p->nextsibling = NULL;
if (!(*T)) {
(*T) = p;
}
else {
q->nextsibling = p;
}
q = p;
DFSTree(G, v, &p);
}
}
}
void PreOrderTraverse(CSTree T) {
if (T) {
printf("%d ", T->data);
PreOrderTraverse(T->lchild);
PreOrderTraverse(T->nextsibling);
}
return;
}
int main() {
MGraph G;
CreateDN(&G);
CSTree T;
DFSForest(G, &T);
PreOrderTraverse(T);
return 0;
}
- 使用上述程序存储下图的无向图,输入如下数据,构建深度优先生成森林,得到DFS的输出结果:

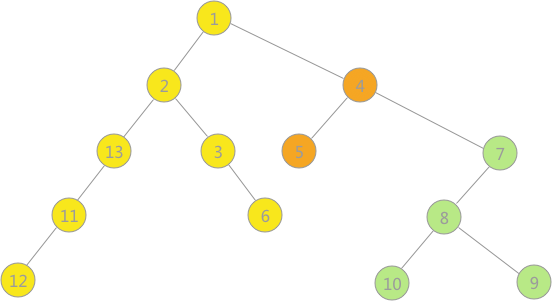
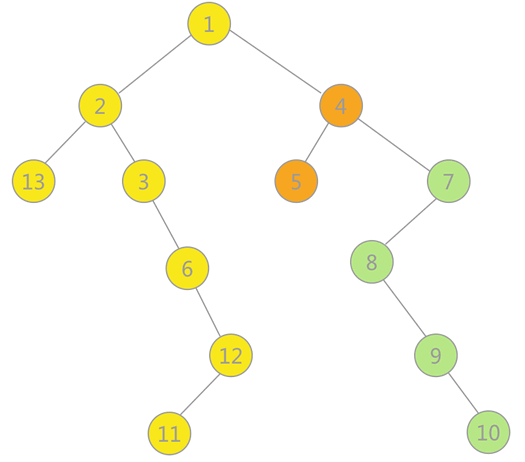
- 构建的深度优先生成森林用孩子兄弟表示法如下所示:3 种颜色的树各代表一棵深度优先生成树,使用孩子兄弟表示法表示,也就是将三棵树的树根相连,第一棵树的树根作为整棵树的树根。
13,13
1
2
3
4
5
6
7
8
9
10
11
12
13
1,2
1,3
1,6
1,12
2,13
4,5
7,8
7,10
7,9
8,10
11,12
11,13
12,13
4.2 广度优先生成森林
- 非连通图采用广度优先搜索算法进行遍历时,经过的顶点以及边的集合为该图的 广度优先生成森林 。
- C 实现:
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERtEX_NUM 20
#define VRType int
#define InfoType char
#define VertexType int
typedef enum{false,true}bool;
bool visited[MAX_VERtEX_NUM];
typedef struct {
VRType adj;
InfoType * info;
}ArcCell,AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM];
typedef struct {
VertexType vexs[MAX_VERtEX_NUM];
AdjMatrix arcs;
int vexnum,arcnum;
}MGraph;
typedef struct CSNode{
VertexType data;
struct CSNode * lchild;
struct CSNode * nextsibling;
}*CSTree,CSNode;
typedef struct Queue{
CSTree data;
struct Queue * next;
}Queue;
int LocateVex(MGraph * G,VertexType v){
int i=0;
for (; i<G->vexnum; i++) {
if (G->vexs[i]==v) {
break;
}
}
if (i>G->vexnum) {
printf("no such vertex.\n");
return -1;
}
return i;
}
void CreateDN(MGraph *G){
scanf("%d,%d",&(G->vexnum),&(G->arcnum));
for (int i=0; i<G->vexnum; i++) {
scanf("%d",&(G->vexs[i]));
}
for (int i=0; i<G->vexnum; i++) {
for (int j=0; j<G->vexnum; j++) {
G->arcs[i][j].adj=0;
G->arcs[i][j].info=NULL;
}
}
for (int i=0; i<G->arcnum; i++) {
int v1,v2;
scanf("%d,%d",&v1,&v2);
int n=LocateVex(G, v1);
int m=LocateVex(G, v2);
if (m==-1 ||n==-1) {
printf("no this vertex\n");
return;
}
G->arcs[n][m].adj=1;
G->arcs[m][n].adj=1;
}
}
int FirstAdjVex(MGraph G,int v)
{
for(int i = 0; i<G.vexnum; i++){
if( G.arcs[v][i].adj ){
return i;
}
}
return -1;
}
int NextAdjVex(MGraph G,int v,int w)
{
for(int i = w+1; i<G.vexnum; i++){
if(G.arcs[v][i].adj){
return i;
}
}
return -1;
}
void InitQueue(Queue ** Q){
(*Q)=(Queue*)malloc(sizeof(Queue));
(*Q)->next=NULL;
}
void EnQueue(Queue **Q,CSTree T){
Queue * element=(Queue*)malloc(sizeof(Queue));
element->data=T;
element->next=NULL;
Queue * temp=(*Q);
while (temp->next!=NULL) {
temp=temp->next;
}
temp->next=element;
}
void DeQueue(Queue **Q,CSTree *u){
(*u)=(*Q)->next->data;
(*Q)->next=(*Q)->next->next;
}
bool QueueEmpty(Queue *Q){
if (Q->next==NULL) {
return true;
}
return false;
}
void BFSTree(MGraph G,int v,CSTree*T){
CSTree q=NULL;
Queue * Q;
InitQueue(&Q);
EnQueue(&Q, (*T));
while (!QueueEmpty(Q)) {
bool first=true;
DeQueue(&Q,&q);
int v=LocateVex(&G,q->data);
visited[v]=true;
for (int w=FirstAdjVex(G,v); w>=0; w=NextAdjVex(G,v, w)) {
if (!visited[w]) {
CSTree p=(CSTree)malloc(sizeof(CSNode));
p->data=G.vexs[w];
p->lchild=NULL;
p->nextsibling=NULL;
EnQueue(&Q, p);
visited[w]=true;
if (first) {
q->lchild=p;
first=false;
}
else{
q->nextsibling=p;
}
q=p;
}
}
}
}
void BFSForest(MGraph G,CSTree *T){
(*T)=NULL;
for (int v=0; v<G.vexnum; v++) {
visited[v]=false;
}
CSTree q=NULL;
for (int v=0; v<G.vexnum; v++) {
if (!(visited[v])) {
CSTree p=(CSTree)malloc(sizeof(CSNode));
p->data=G.vexs[v];
p->lchild=NULL;
p->nextsibling=NULL;
if (!(*T)) {
(*T)=p;
}
else{
q->nextsibling=p;
}
q=p;
BFSTree(G,v,&p);
}
}
}
void PreOrderTraverse(CSTree T){
if (T) {
printf("%d ",T->data);
PreOrderTraverse(T->lchild);
PreOrderTraverse(T->nextsibling);
}
return;
}
int main() {
MGraph G;
CreateDN(&G);
CSTree T;
BFSForest(G, &T);
PreOrderTraverse(T);
return 0;
}
- 使用上述程序存储下图的无向图,输入如下数据,构建广度优先生成森林,得到BFS的输出结果:
- 对上图通过广度优先搜索得到的广度优先生成森林用孩子兄弟表示法如下图所示:
13,13
1
2
3
4
5
6
7
8
9
10
11
12
13
1,2
1,3
1,6
1,12
2,13
4,5
7,8
7,10
7,9
8,10
11,12
11,13
12,13








![[BJDCTF 2020]base??(古典密码)](https://img-blog.csdnimg.cn/direct/66178e15508c41d59b5c10beceaf1403.png)