文章目录
- 2020
- Visual Servoing-based Navigation for Monitoring Row-Crop Fields
2020
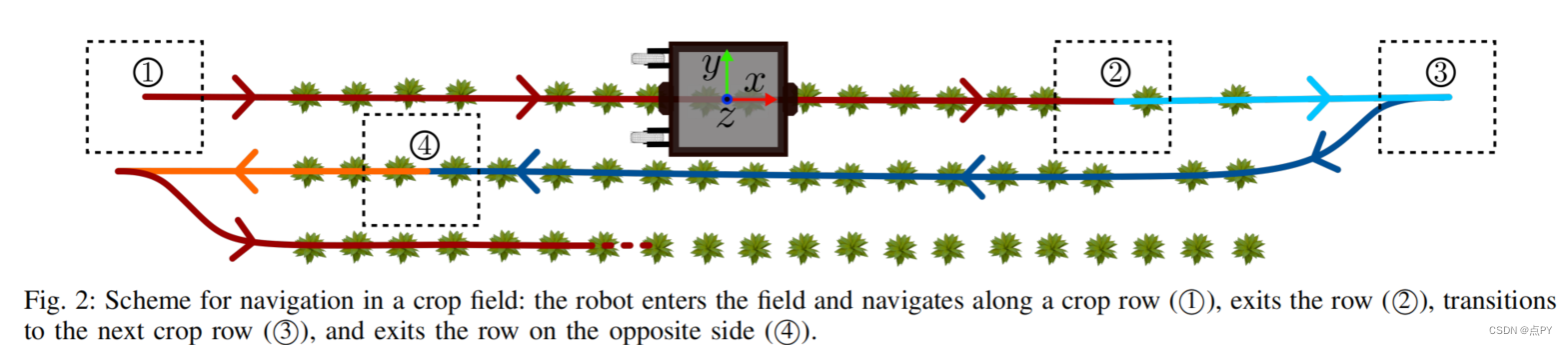
Visual Servoing-based Navigation for Monitoring Row-Crop Fields
code: https://github.com/PRBonn/visual-crop-row-navigation
摘要: 自主导航是野外机器人执行精确农业任务的先决条件。通常情况下,机器人必须在一个季节内在整个农田中导航几次,以监测植物、施用农用化学品或执行有针对性的干预行动。在本文中,我们提出了一个利用常规的作物行结构进行行作物田导航的框架。我们的方法只使用来自车载摄像机的图像,而不需要执行显式定位或维护现场地图,因此可以在没有农业自动化系统中经常使用的昂贵的RTK-GPS解决方案的情况下运行。我们的导航方法允许机器人准确地跟随裁剪行,并在同一框架内无缝地处理到下一行的开关。我们使用C++和ROS实现了我们的方法,并在几个不同形状和大小的模拟环境中进行了彻底的测试。我们还演示了在测试行作物现场运行的实际机器人上以帧率运行的系统。代码和数据已经发布。