PotatoPie 4.0开发板教程目录(2024/04/21)
为什么要进行图像的二值化?
当我们处理图像时,常常需要将其转换为二值图像。这是因为在很多应用中,我们只对图像中的某些特定部分感兴趣,而不需要考虑所有像素的颜色信息。下面我会详细解释为什么要进行图像的二值化:
-
简化图像结构:彩色图像包含大量的像素,每个像素都有自己的颜色信息。这种复杂性使得图像处理变得复杂。将图像转换为二值图像可以大大简化图像结构,使得后续的处理更加高效。
-
突出目标特征:在很多应用中,我们只对图像中的某些目标感兴趣,而不关心其他部分。通过二值化,我们可以将目标与背景分离,突出目标的特征,便于进一步的分析和处理。
-
去除噪声:图像中常常包含各种噪声,如摄像头传感器的噪声、环境光线的影响等。这些噪声会干扰图像的分析和处理。通过二值化,我们可以将噪声过滤掉,只保留目标信息,提高图像的质量。
-
减少计算量:在一些图像处理算法中,需要对每个像素进行复杂的计算。如果图像的分辨率很高,计算量会非常大。将图像转换为二值图像可以大大减少计算量,提高算法的执行效率。
-
图像压缩:二值图像只包含黑白两种颜色,信息量较少。因此,可以通过二值化来压缩图像,减少存储空间和传输带宽。
总之,图像二值化是图像处理中的一项基础技术,它可以简化图像结构、突出目标特征、去除噪声、减少计算量以及实现图像压缩等多种目的。
图像二值化的常用算法
图像二值化是图像处理中的一项基础任务,有许多不同的算法可以实现。以下是几种常用的图像二值化算法:
-
全局阈值法(Global Thresholding):全局阈值法是最简单和最常用的二值化方法之一。它通过设定一个全局阈值,将图像中的像素分为两类:大于阈值的像素设为白色,小于等于阈值的像素设为黑色。其中,Otsu 方法是全局阈值法中的一种优化方法,它能自动确定最佳的阈值,使得类间方差最大化。
-
局部阈值法(Local Thresholding):局部阈值法考虑到图像中不同区域的灰度分布可能不同,因此采用不同的阈值来进行二值化。常见的局部阈值法包括自适应阈值法和基于统计的方法,如局部均值、局部中值等。
-
基于直方图的方法(Histogram-based Methods):这些方法利用图像的灰度直方图来确定阈值。常见的方法包括基于双峰分析、直方图形态学等。
-
基于梯度的方法(Gradient-based Methods):这些方法基于图像的梯度信息来确定阈值。常见的方法包括基于边缘检测算子的方法,如Sobel、Prewitt等。
-
基于聚类的方法(Clustering-based Methods):这些方法将图像中的像素看作是一个样本集合,利用聚类算法将像素分成两个类别,然后根据类别信息进行二值化。常见的方法包括K均值聚类、自组织映射聚类等。
这些算法各有优缺点,适用于不同的图像处理任务和场景。在实际应用中,根据图像的特点和需求选择合适的二值化算法是非常重要的。我们本节实验主要采用Otsu 方法。
Otsu 方法是由日本学者大津展之(Nobuyuki Otsu)于1979年提出的图像二值化算法。这个方法旨在通过自适应地确定最佳阈值,将图像分为背景和前景两个类别,以最大化类间方差来实现图像的自动化处理。
在 Otsu 方法被提出之前,常用的图像二值化方法主要是基于手动设定阈值的全局阈值法。然而,手动选择阈值可能会因为主观性而不准确,尤其是对于不同的图像和应用场景,需要不断调整阈值才能得到满意的结果。Otsu 方法的提出填补了这一缺陷,使得图像二值化可以更加自动化和准确。
Otsu 方法的核心思想是通过最大化类间方差来确定最佳的阈值。在图像中,背景和前景之间的差异体现在它们的灰度分布上。通过寻找一个阈值,使得背景和前景之间的类间方差最大化,我们可以实现最佳的图像二值化。这种方法不仅能够自动地确定最佳阈值,而且在很多情况下能够产生高质量的二值化结果。
Otsu 方法的提出极大地促进了图像处理领域的发展,成为了图像二值化中的经典算法之一。它被广泛应用于数字图像处理、计算机视觉、图像分割等领域,为图像分析和识别提供了重要的基础。
Otsu 算法的详细步骤:
-
计算直方图:首先,计算图像的灰度直方图,统计每个灰度级别的像素数量。
-
归一化直方图:将直方图中每个灰度级别的像素数量除以图像的总像素数,得到每个灰度级别的归一化频率。
-
计算累积分布函数:计算归一化直方图的累积分布函数,即累积概率密度函数。这可以通过累加每个灰度级别的归一化频率来实现。
-
初始化类间方差和最佳阈值:初始化类间方差为 0,并将最佳阈值设为 0。
-
遍历阈值:对每个可能的阈值 t 进行遍历(从 0 到最大灰度级别)。
-
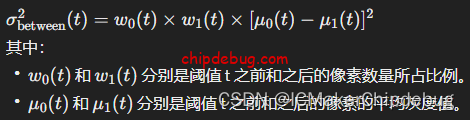
计算类间方差:对于每个阈值 t,计算两个类别的均值和方差,然后根据这些统计量计算类间方差。类间方差可通过下式计算得到:
-
选择最佳阈值:选择使类间方差最大的阈值作为最佳阈值,即找到能够最好地将图像分成两个类别,使得类别之间的差异最大化。
-
应用阈值:使用最佳阈值将图像进行二值化处理,将大于阈值的像素设为白色(255),小于等于阈值的像素设为黑色(0)。
-
通过这些步骤,Otsu 算法能够自动确定最佳的阈值,将图像转换为二值图像,并且在很多情况下能够产生高质量的二值化结果。
用python实现Otsu 算法对图像进行二值化处理
PotatoPie 4.0 实验教程(21) —— FPGA实现摄像头图像二值化(RGB2Gray2Bin)-Anlogic-安路论坛-FPGA CPLD-ChipDebug
这个代码会读取名为 Lena.jpg 的彩色图片,然后将其转换为灰度图像,并使用 Otsu 算法进行图像二值化。然后显示原始彩色图像、灰度图像和二值化后的图像。
用如下的powershell指令运行python脚本,后面的教程中将不再举例说明如何运行python文件。
可以看到演示效果:
上面的代码是直接采用的opencv的otsu方法实现的,没有展示细节,我们下面提供的这段代码展示了otsu的方法细节。
matlab版代码
PotatoPie 4.0 实验教程(21) —— FPGA实现摄像头图像二值化(RGB2Gray2Bin)-Anlogic-安路论坛-FPGA CPLD-ChipDebug
这段 MATLAB 代码实现了以下功能:
- 读取名为 “Lena.jpg” 的彩色图像。
- 将彩色图像转换为灰度图像。
- 使用 Otsu 算法对灰度图像进行二值化处理,得到二值化图像。
- 在单个窗口中显示原始彩色图像、灰度图像和二值化图像,以便比较和分析图像处理的效果。
通过这段代码,可以轻松地了解图像处理中常用的 Otsu 二值化算法,并可视化其效果。
FPGA工程分析
工程层次图
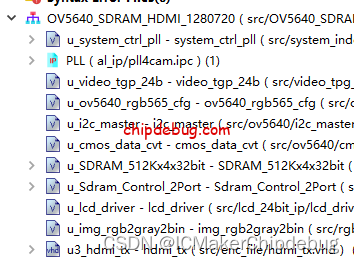
与demo18相比,只是多了一个img2rgb的模块,也就是下面这一段代码,在从SDRAM读出来之后,经它处理后再输出hdmi_tx模块。
img_rgb2gray2bin u_img_rgb2gray2bin
(
.i_clk(clk_pixel),
.i_rst_n(sys_rst_n),
.i_hs(VGA_HS),
.i_vs(VGA_VS),
.i_de (VGA_DE),
.i_vld(1'b1),
.i_th(78),
.i_r(VGA_RGB[23:16]),
.i_g(VGA_RGB[15:8] ),
.i_b(VGA_RGB[7:0] ),
.o_bin_hs(gray_hs),
.o_bin_vs(gray_vs),
.o_bin_de (gray_de),
.o_bin_data(gray_data)
);
模块代码分析
由于 Otsu 算法使用 Verilog 实现十分复杂,这些步骤在EG4上实现资源不太够, 这里我们将直接指定阈值进行二值化。
模块的管脚定义注释比较清晰,如下
module img_rgb2gray2bin (
input wire i_clk, // 时钟信号
input wire i_rst_n, // 复位信号
input wire i_vld, // 有效信号
input wire [7:0] i_th, // 阈值信号
input wire i_hs, // 水平同步信号
input wire i_vs, // 垂直同步信号
input wire [7:0] i_r, // 红色通道信号
input wire [7:0] i_g, // 绿色通道信号
input wire [7:0] i_b, // 蓝色通道信号
input wire i_de, // 数据使能信号
output reg o_bin_hs, // 二值化水平同步信号
output reg o_bin_vs, // 二值化垂直同步信号
output reg o_bin_de, // 二值化数据使能信号
output reg [7:0] o_bin_data // 二值化图像数据信号
);
代码的流程比较简单先进行灰度转换
然后进行阈值比较
管脚约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
时序约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
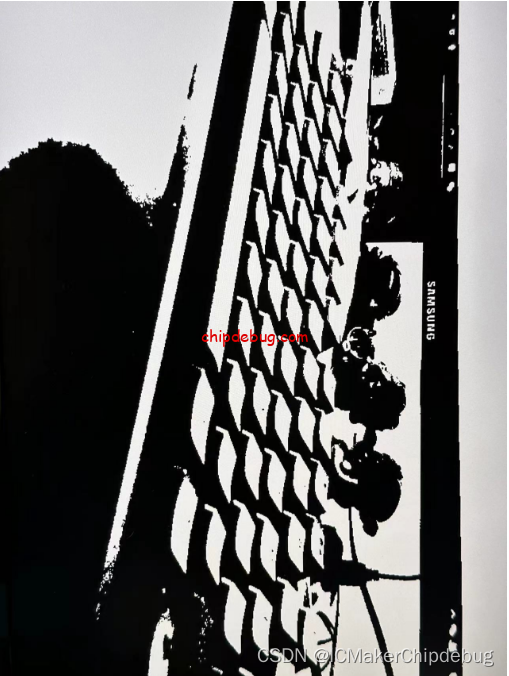
实验结果
这是我的键盘和显示器,这效果出来像水墨画啊,下面是阈值98时候的效果。

说值调到45看看。

调到 78时效果我比较喜欢