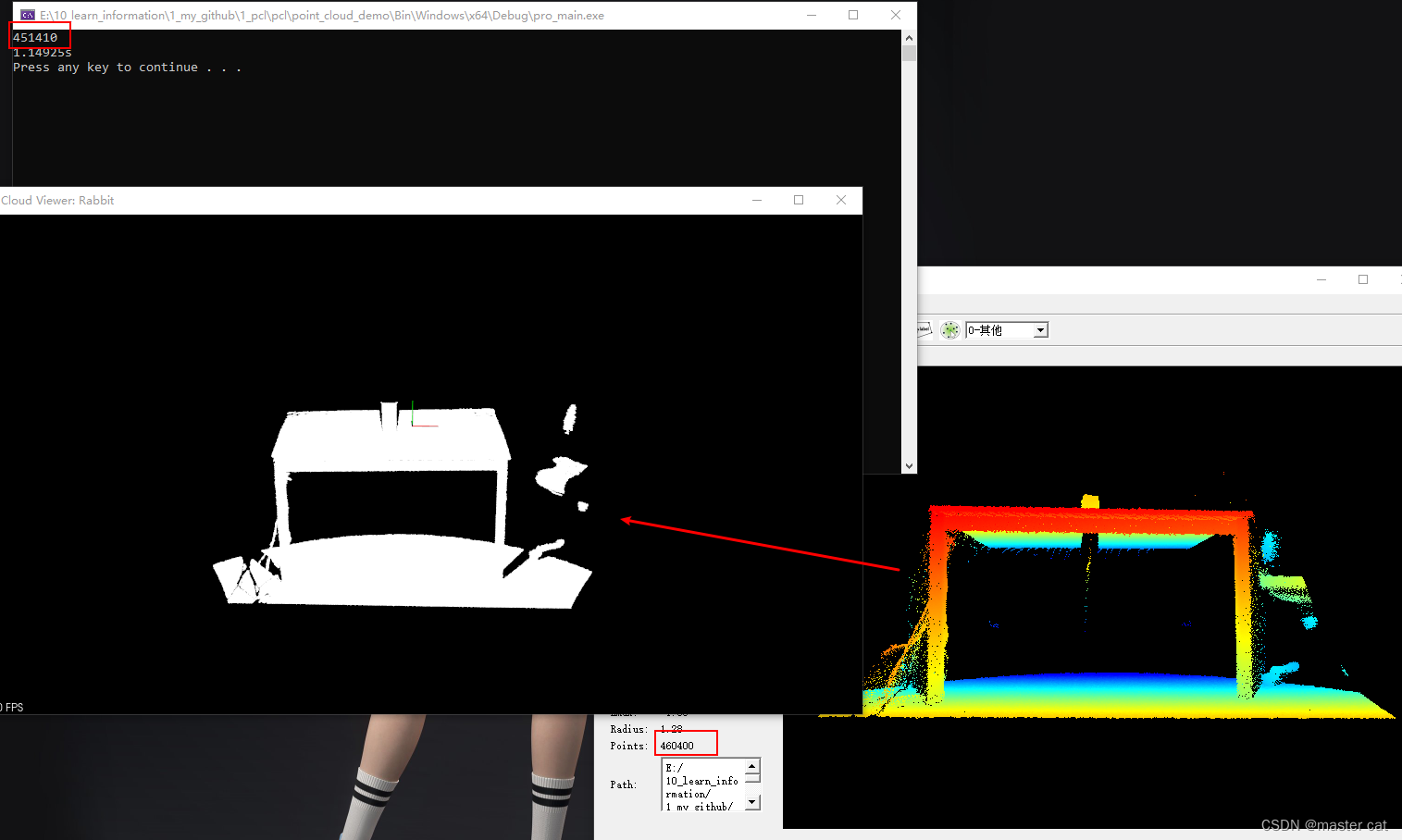
statisticalOutlierRemoval滤波器移除离群点
/// <summary>
/// 使用statisticalOutlierRemoval滤波器移除离群点
/// </summary>
/// <param name="cloud">被过滤的点云</param>
/// <param name="meank"></param>
/// <param name="threshold"></param>
/// <param name="Inversion">是否对结果取反,false:删除离群点,true:保留离群点</param>
/// <returns></returns>
pcl::PointCloud<pcl::PointXYZ>::Ptr PclTool::statisticalOutlierRemovalFilter(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, int meank, double threshold, bool inversion)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor; // 创建滤波器对象
sor.setInputCloud(cloud); // 设置待滤波的点云
sor.setMeanK(meank); // 设置在进行统计时考虑查询点临近点数
sor.setStddevMulThresh(1.0); // 设置判断是否为离群点的阀值
sor.setNegative(inversion);
sor.filter(*cloud_filtered); // 存储
return cloud_filtered;
}
- 删除离群点
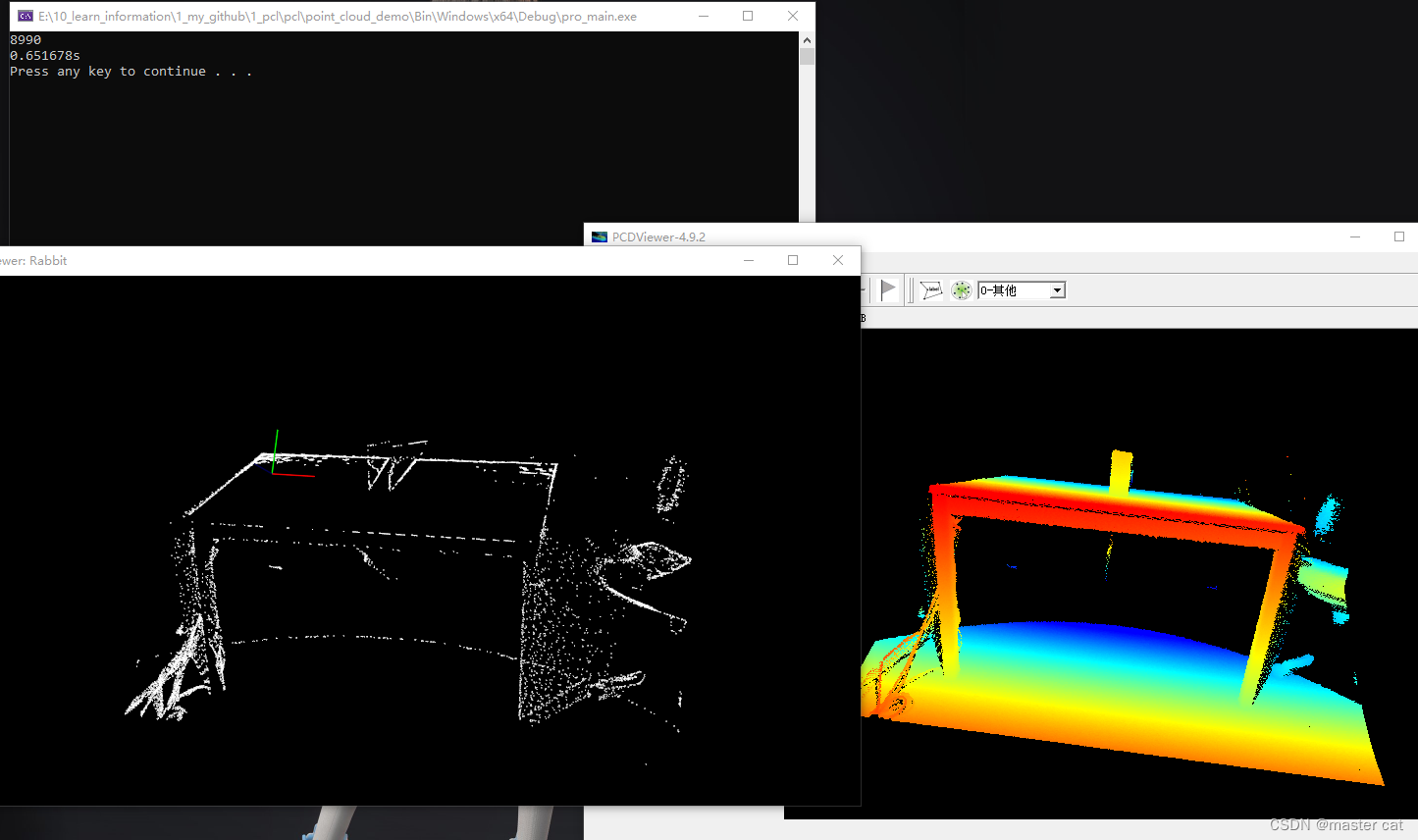
- 仅保留离群点
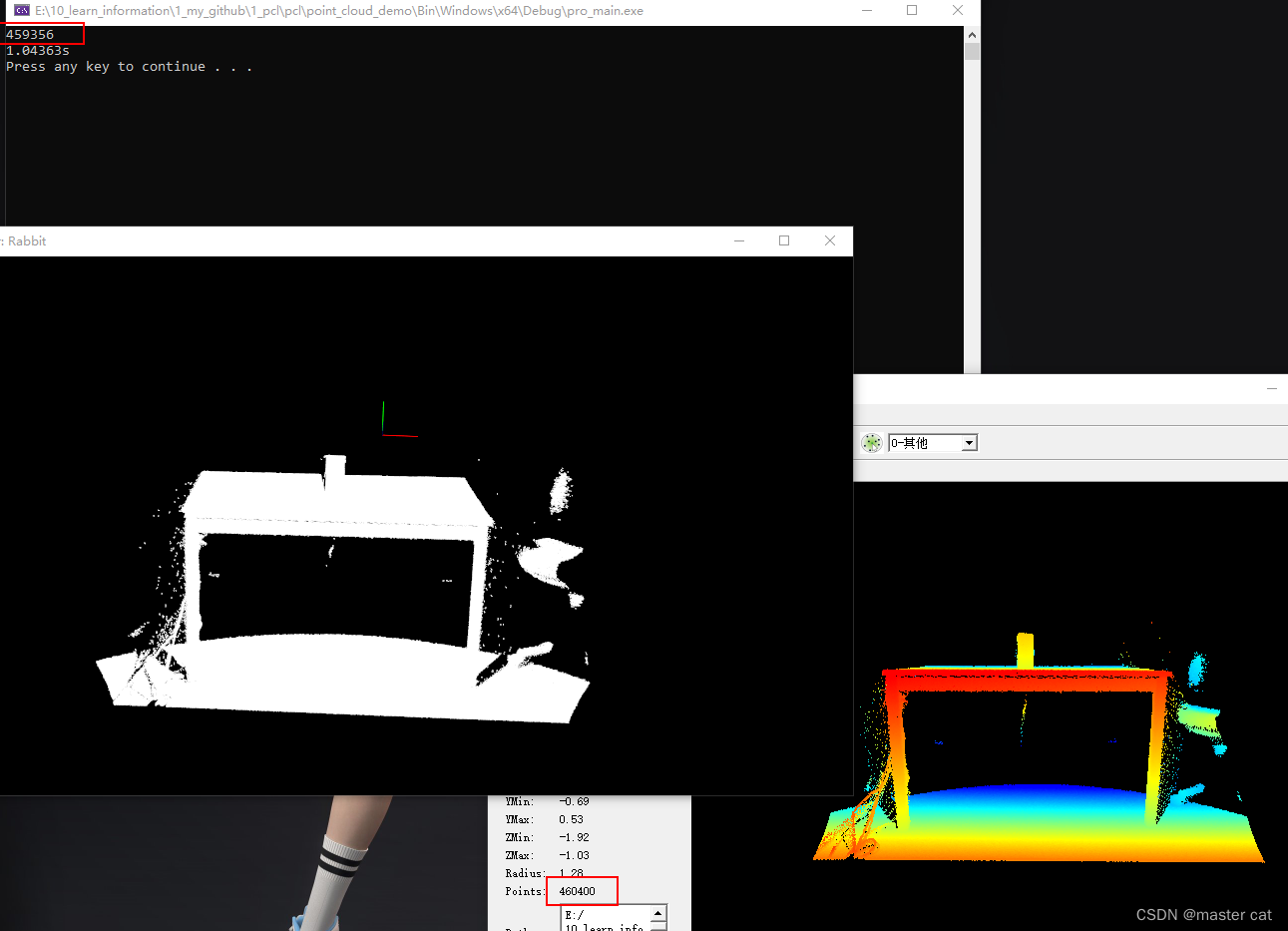
RadiusOutlinerRemoval 移除离群点
/// <summary>
/// RadiusOutlinerRemoval 移除离群点
/// </summary>
/// <param name="cloud"></param>
/// <param name="radius">设置半径的范围内找临近点</param>
/// <param name="minInRadius">设置查询点的邻域点集数小于minInRadius的删除</param>
/// <returns></returns>
pcl::PointCloud<pcl::PointXYZ>::Ptr PclTool::RORemoval(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, double radius, int minInRadius)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem; // 创建滤波器
outrem.setInputCloud(cloud); // 设置输入点云
outrem.setRadiusSearch(radius); // 设置半径为0.8的范围内找临近点
outrem.setMinNeighborsInRadius(minInRadius); // 设置查询点的邻域点集数小于2的删除
// apply filter
outrem.filter(*cloud_filtered); // 执行条件滤波 在半径为0.8 在此半径内必须要有两个邻居点,此点才会保存
return cloud_filtered;
}
ConditionalRemoval 移除离群点
pcl::PointCloud<pcl::PointXYZ>::Ptr PclTool::conditionRemoval(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, std::vector<pcl::FieldComparison<pcl::PointXYZ>::ConstPtr> comparisons)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
// 创建条件限定的下的滤波器
pcl::ConditionAnd<pcl::PointXYZ>::Ptr range_cond(new pcl::ConditionAnd<pcl::PointXYZ>()); // 创建条件定义对象
// 添加在Z字段上大于0的比较算子
// GT greater than
// EQ equal
// LT less than
// GE greater than or equal
// LE less than or equal 小于等于
为条件定义对象添加比较算子
//pcl::FieldComparison<pcl::PointXYZ>::ConstPtr comp1(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::GT, 0.0)); // 添加在Z字段上大于0的比较算子
//pcl::FieldComparison<pcl::PointXYZ>::ConstPtr comp2(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::LT, 0.8)); // 添加在Z字段上小于0.8的比较算子
//range_cond->addComparison(comp1);
//range_cond->addComparison(comp2);
//range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::GT, 0.0))); // 添加在Z字段上大于0的比较算子
//range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::LT, 0.8))); // 添加在Z字段上小于0.8的比较算子
for (const auto& once : comparisons)
{
range_cond->addComparison(once);
}
// 创建滤波器并用条件定义对象初始化
pcl::ConditionalRemoval<pcl::PointXYZ> condrem;
condrem.setCondition(range_cond);
condrem.setInputCloud(cloud); // 输入点云
condrem.setKeepOrganized(true); // 设置保持点云的结构
// 设置是否保留滤波后删除的点,以保持点云的有序性,通过setuserFilterValue设置的值填充点云;或从点云中删除滤波后的点,从而改变其组织结构
// 如果设置为true且不设置setUserFilterValue的值,则用nan填充点云
// https://blog.csdn.net/qq_37124765/article/details/82262863
// 执行滤波
condrem.filter(*cloud_filtered);
return cloud_filtered;
}