目录
- 一. 进程同步
- 二. 进程互斥
- 三. 进程互斥软件实现
- 四. 进程互斥硬件实现
- 4.1 中断屏蔽方法
- 4.2 test and set 指令
- 4.3 Swap 指令
- 五. 互斥锁
- 六. 信号量机制
- 6.1 整型信号量
- 6.2 记录型信号量
- 6.3 信号量机制实现进程互斥
- 6.4 信号量机制实现进程同步
- 6.5 信号量机制实现进程前驱关系
\quad
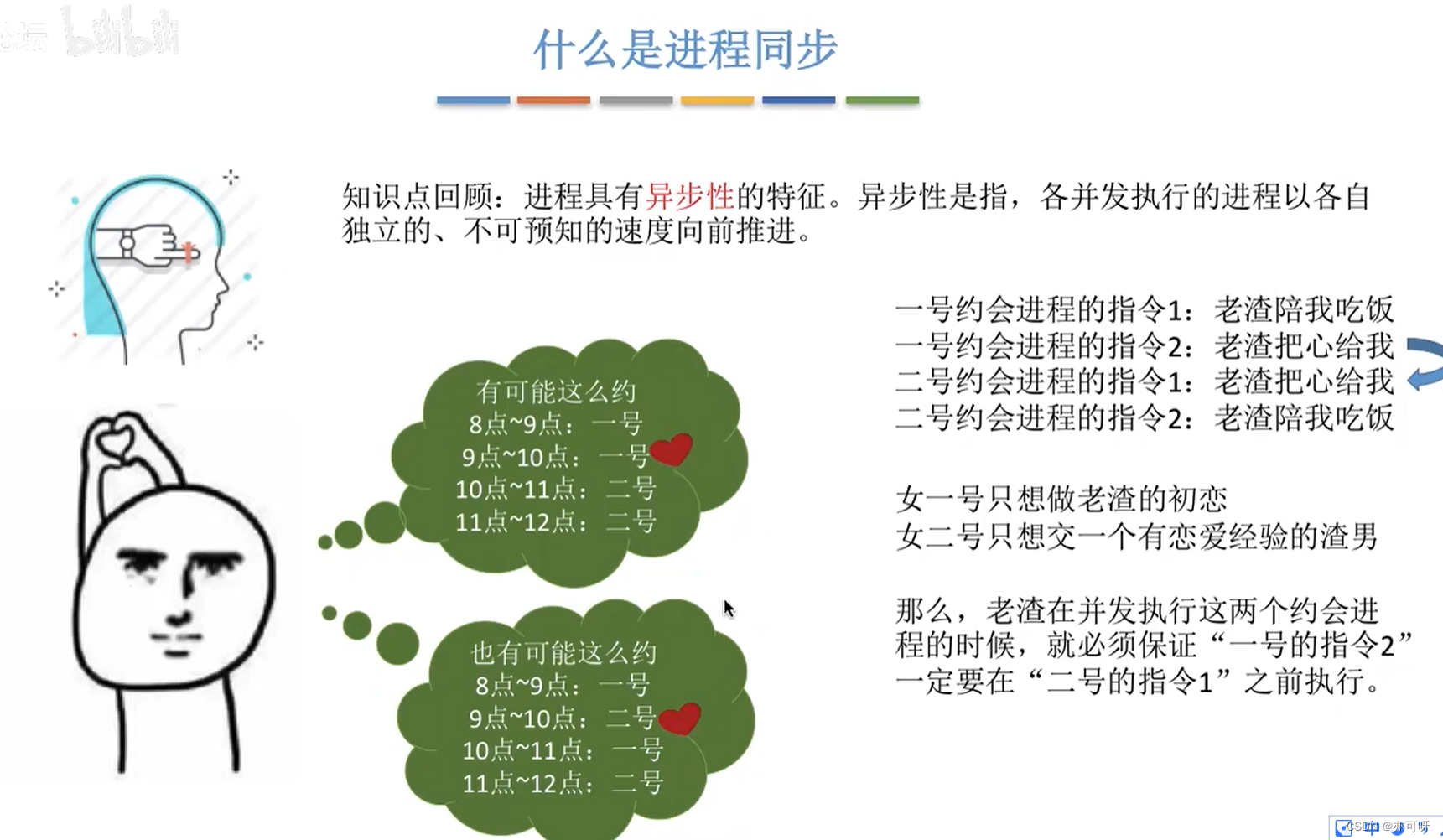
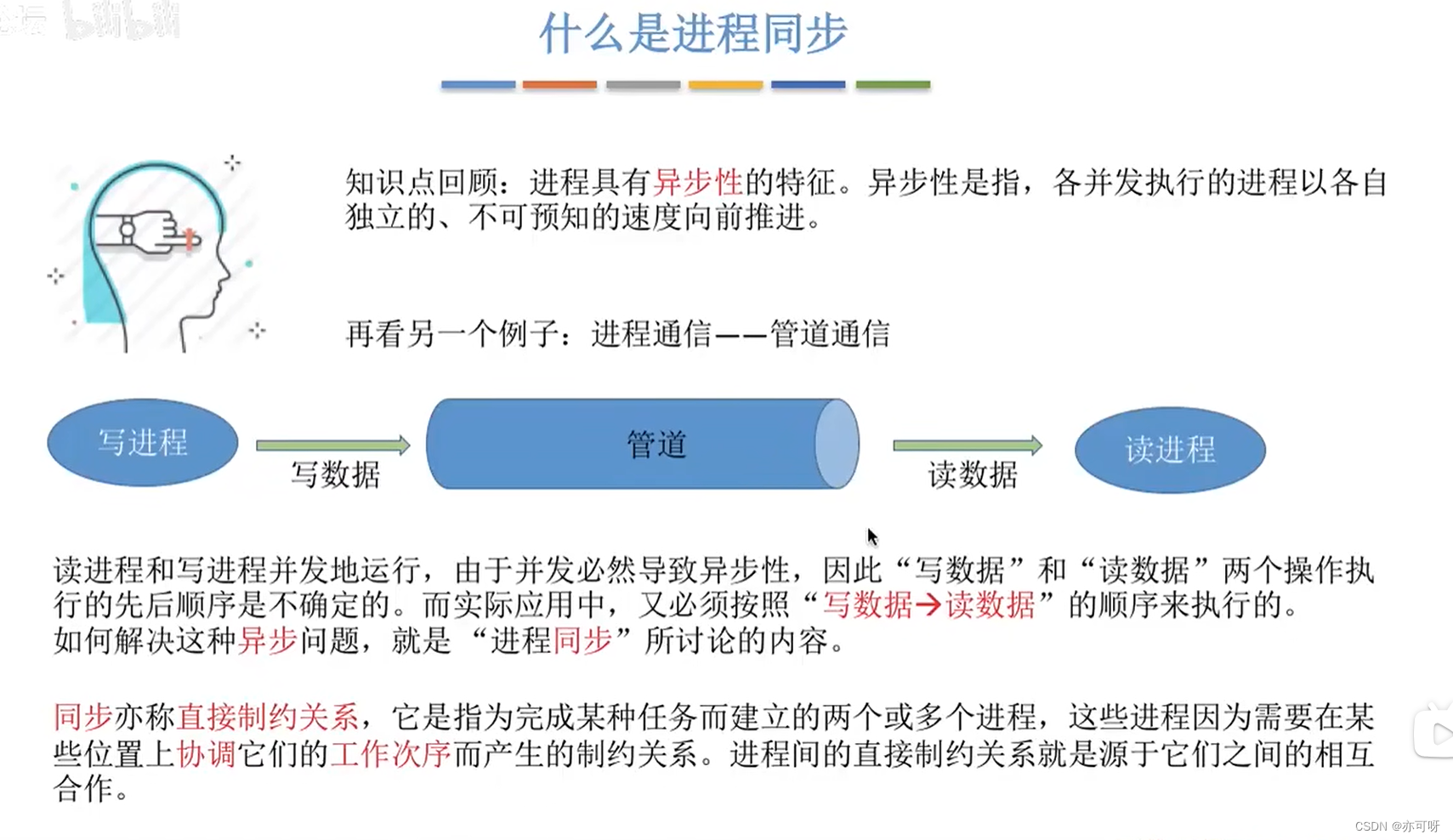
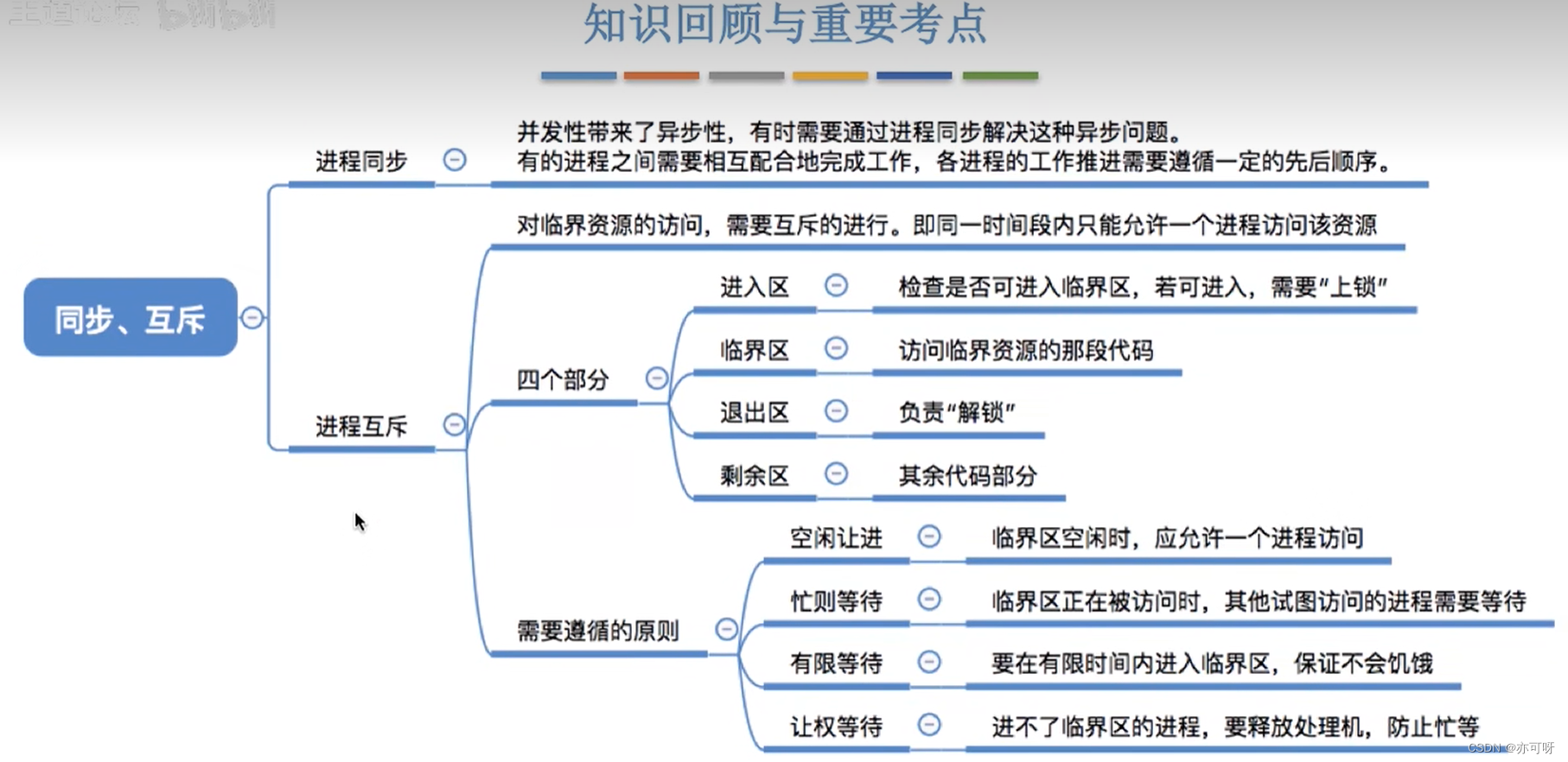
一. 进程同步
\quad
\quad
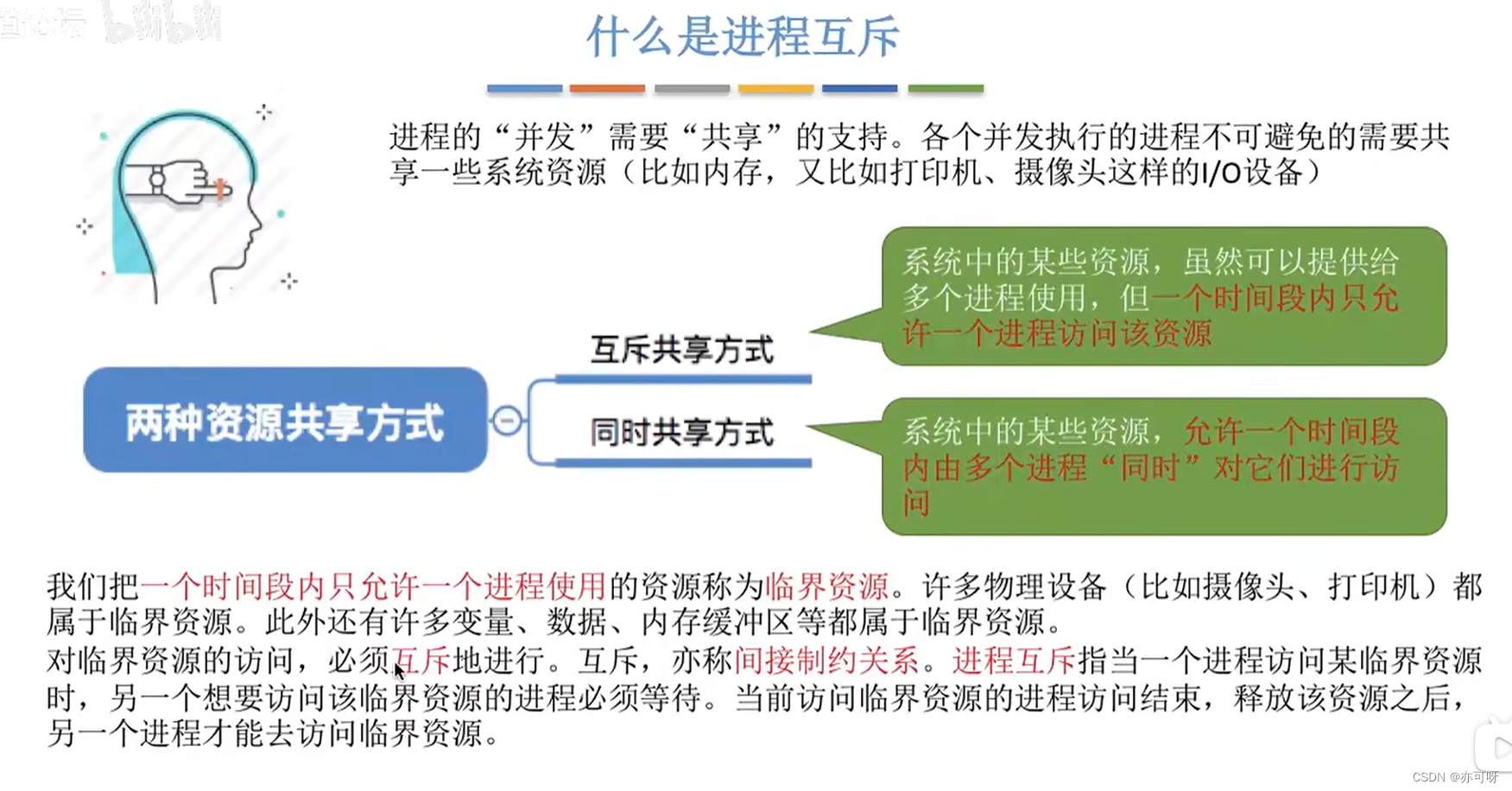
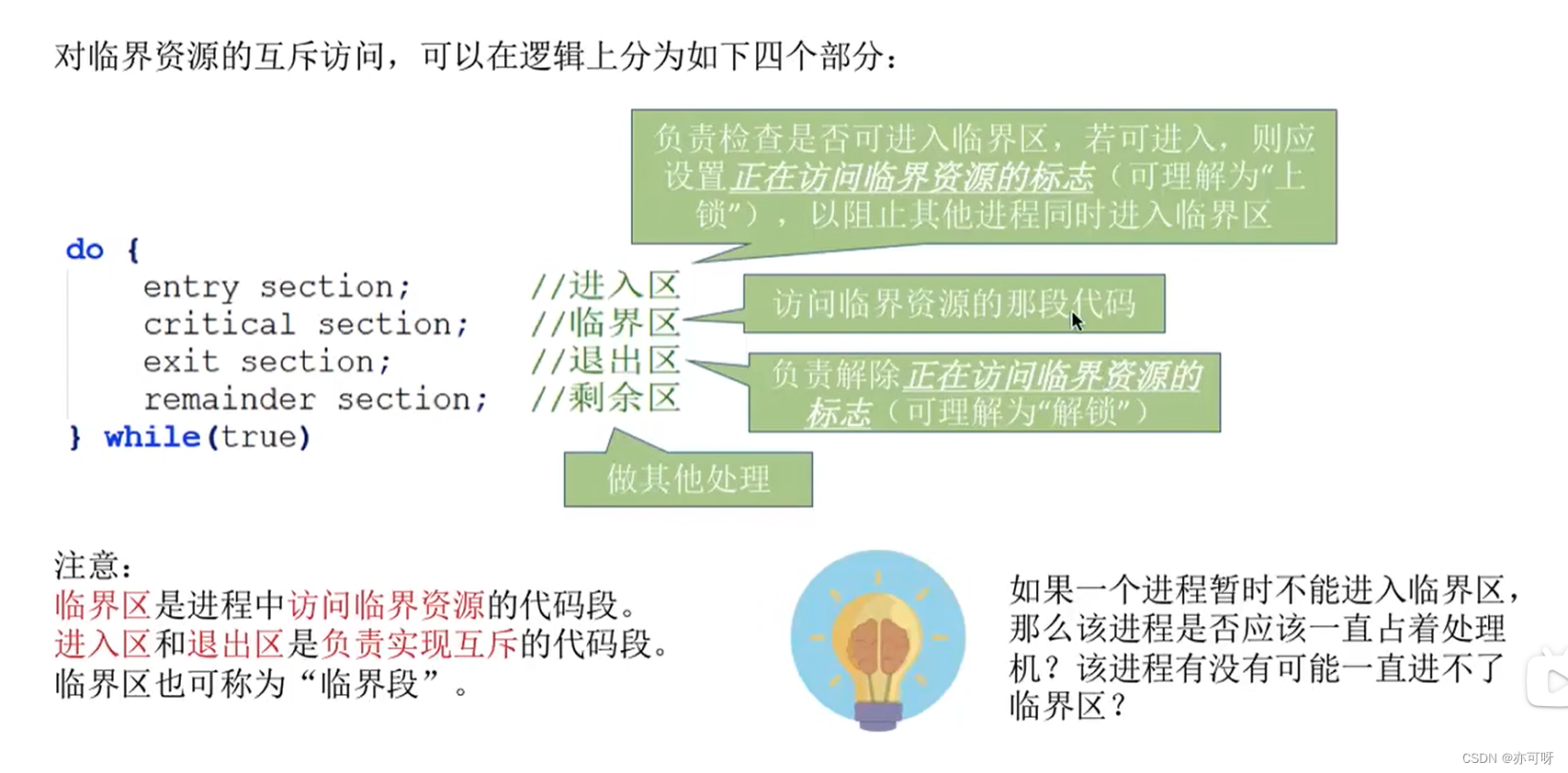
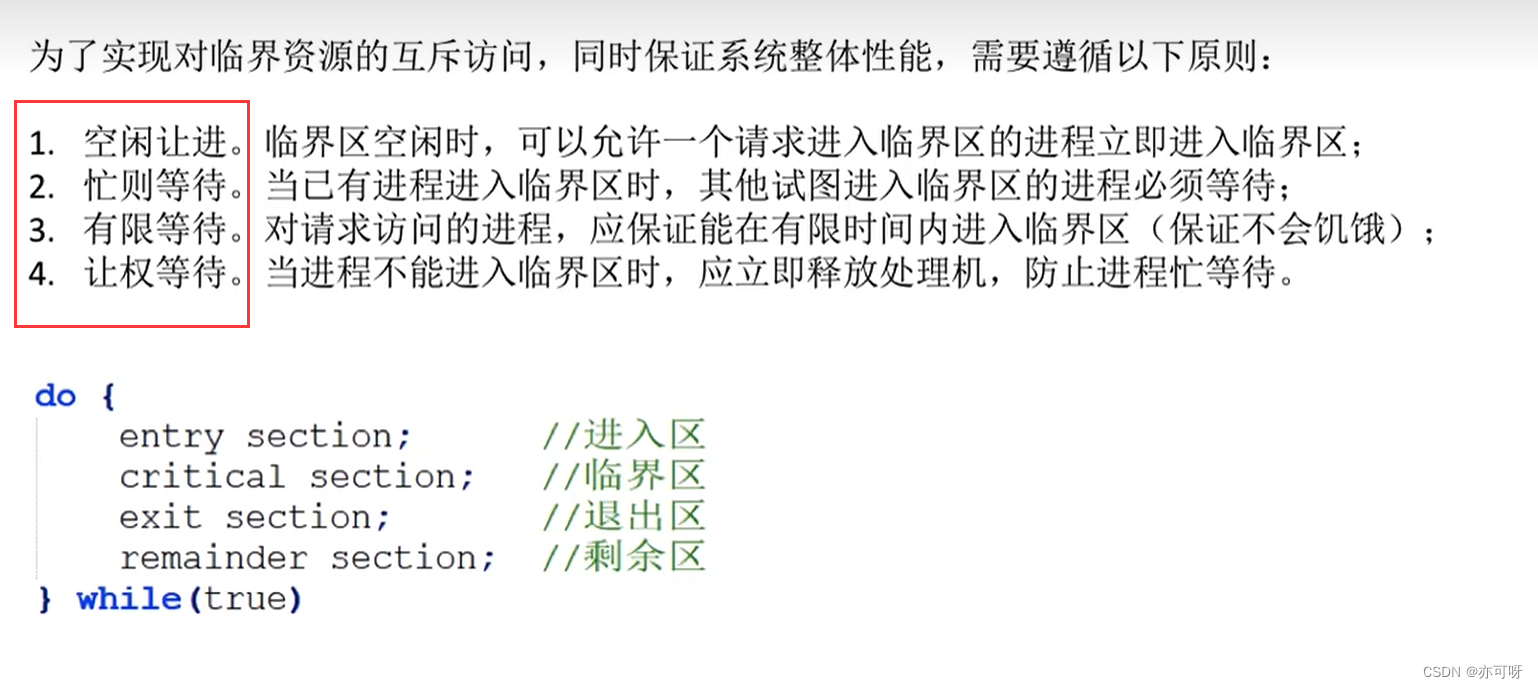
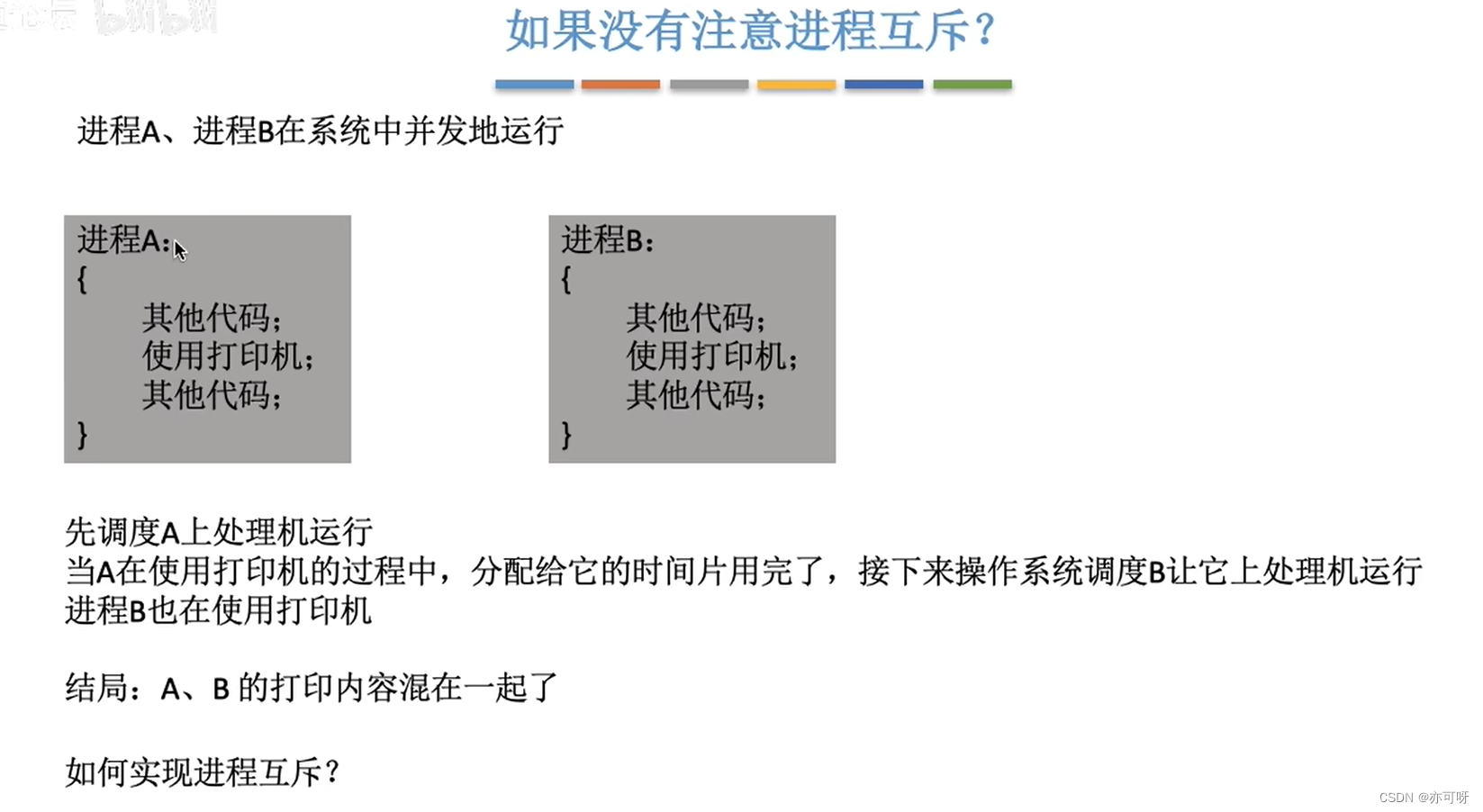
二. 进程互斥
\quad
\quad
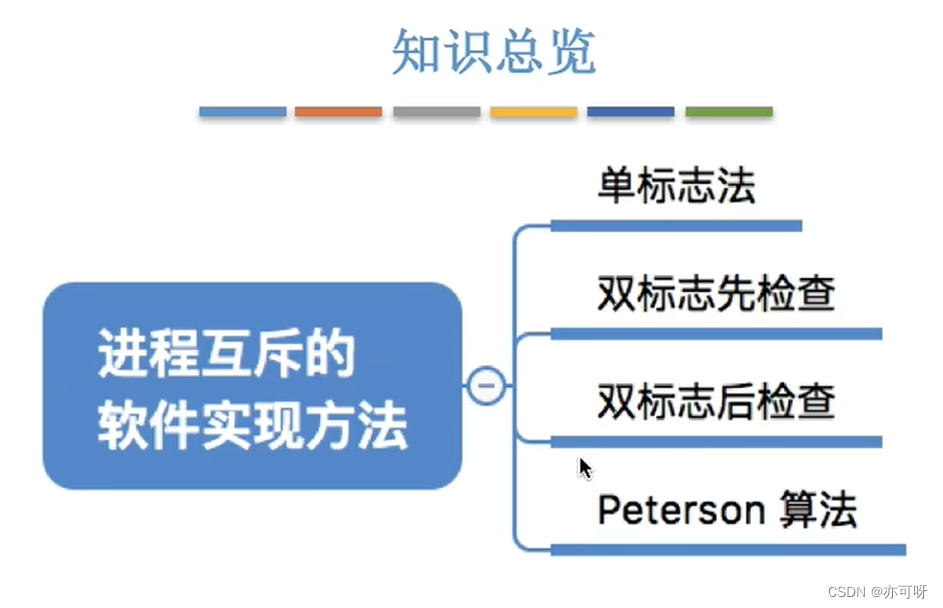
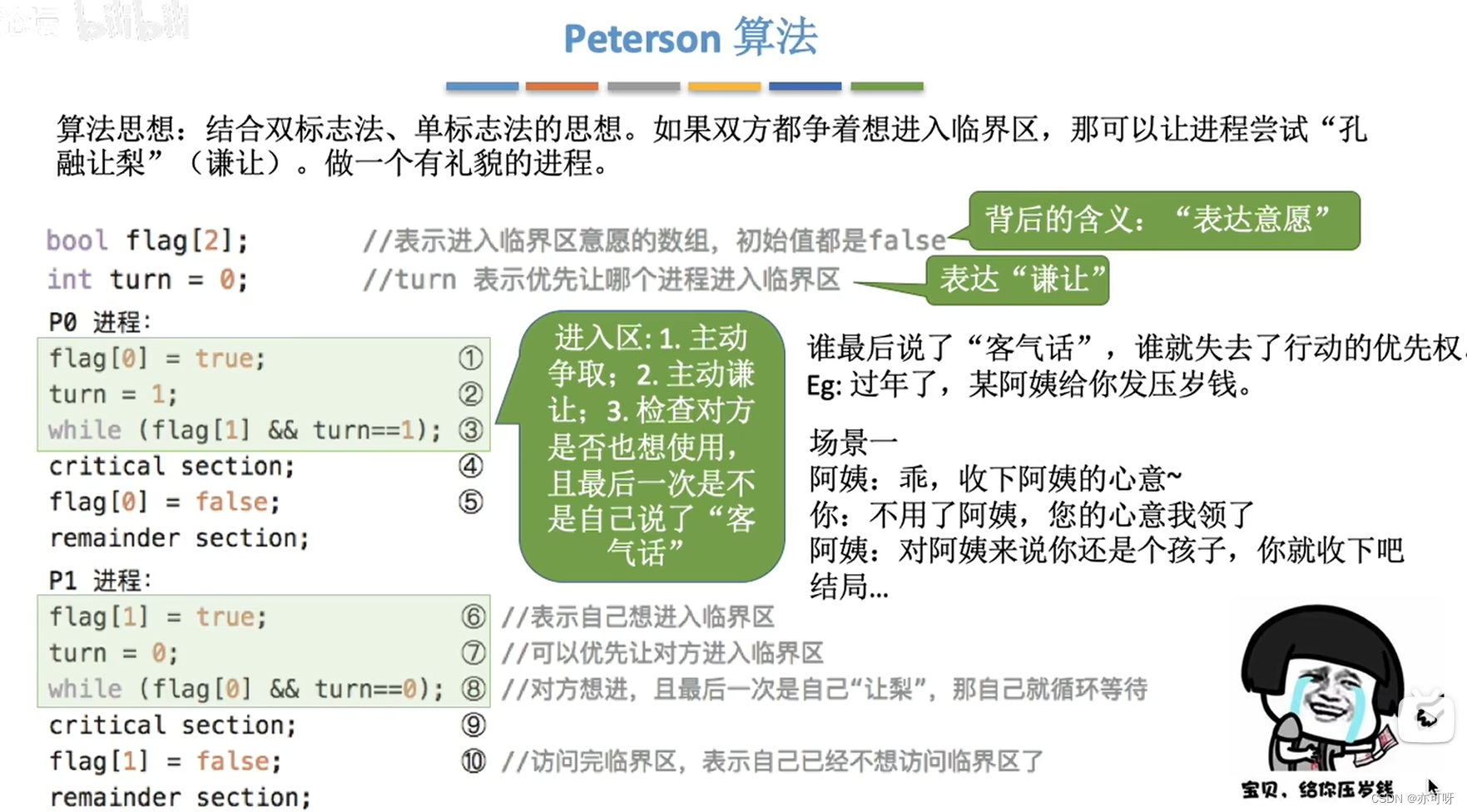
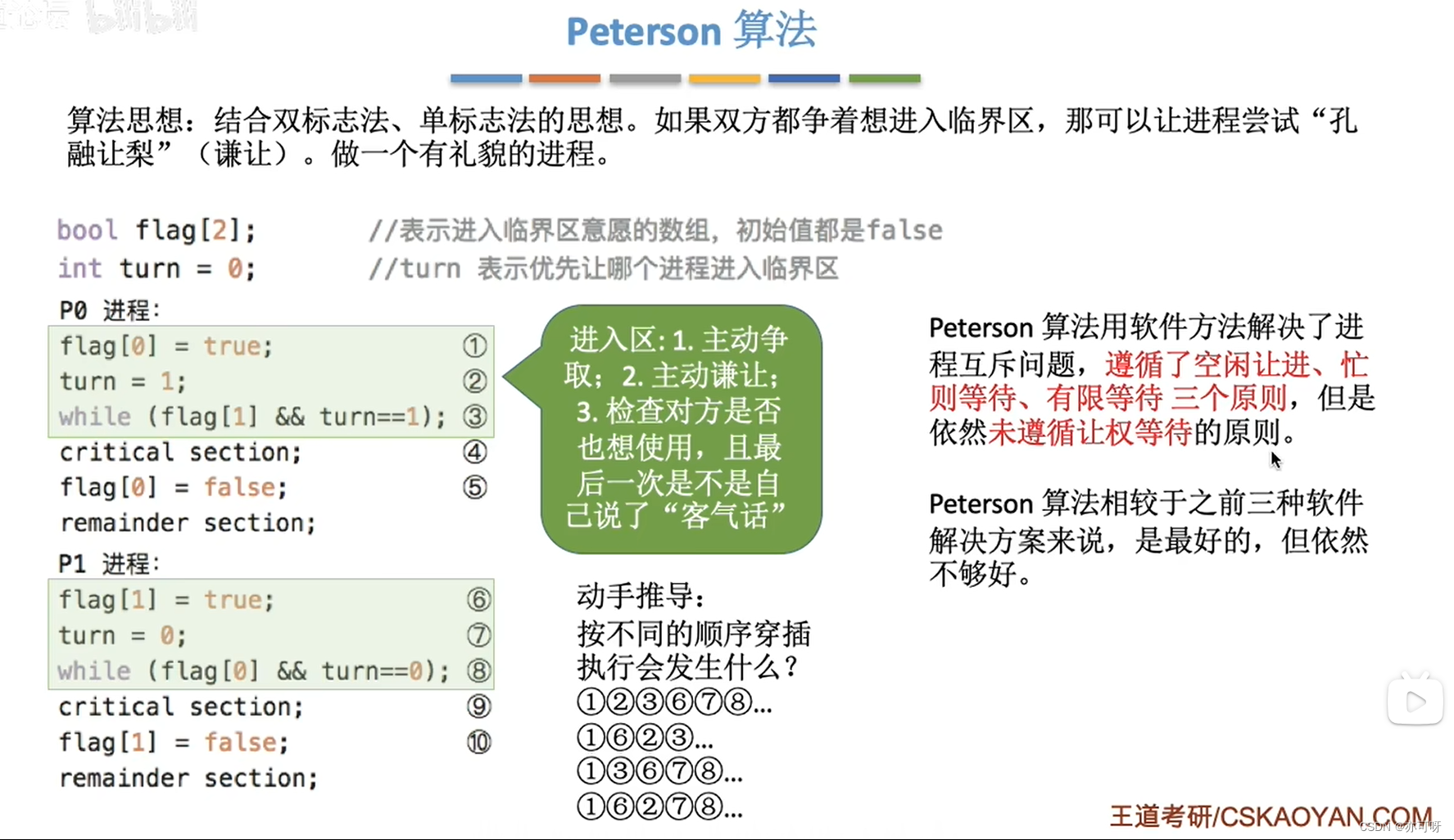
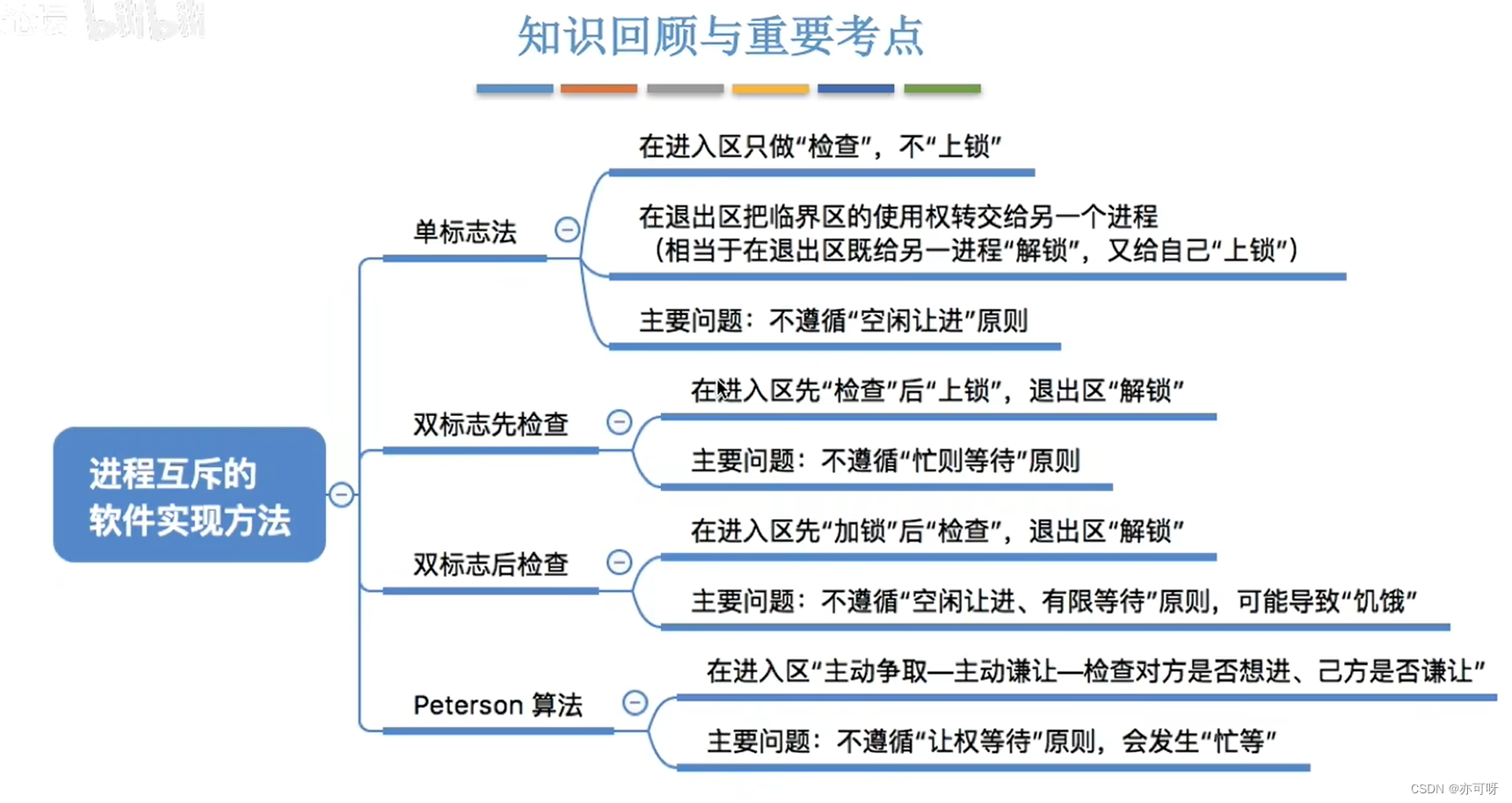
三. 进程互斥软件实现
\quad
学习提示:
1.理解各个算法的思想、原理
2.结合上小节学习的“实现互斥的四个逻辑部分”,重点理解各算法在进入区、退出区都做了什么3.分析各算法存在的缺陷(结合“实现互斥要遵循的四个原则”进行分析)
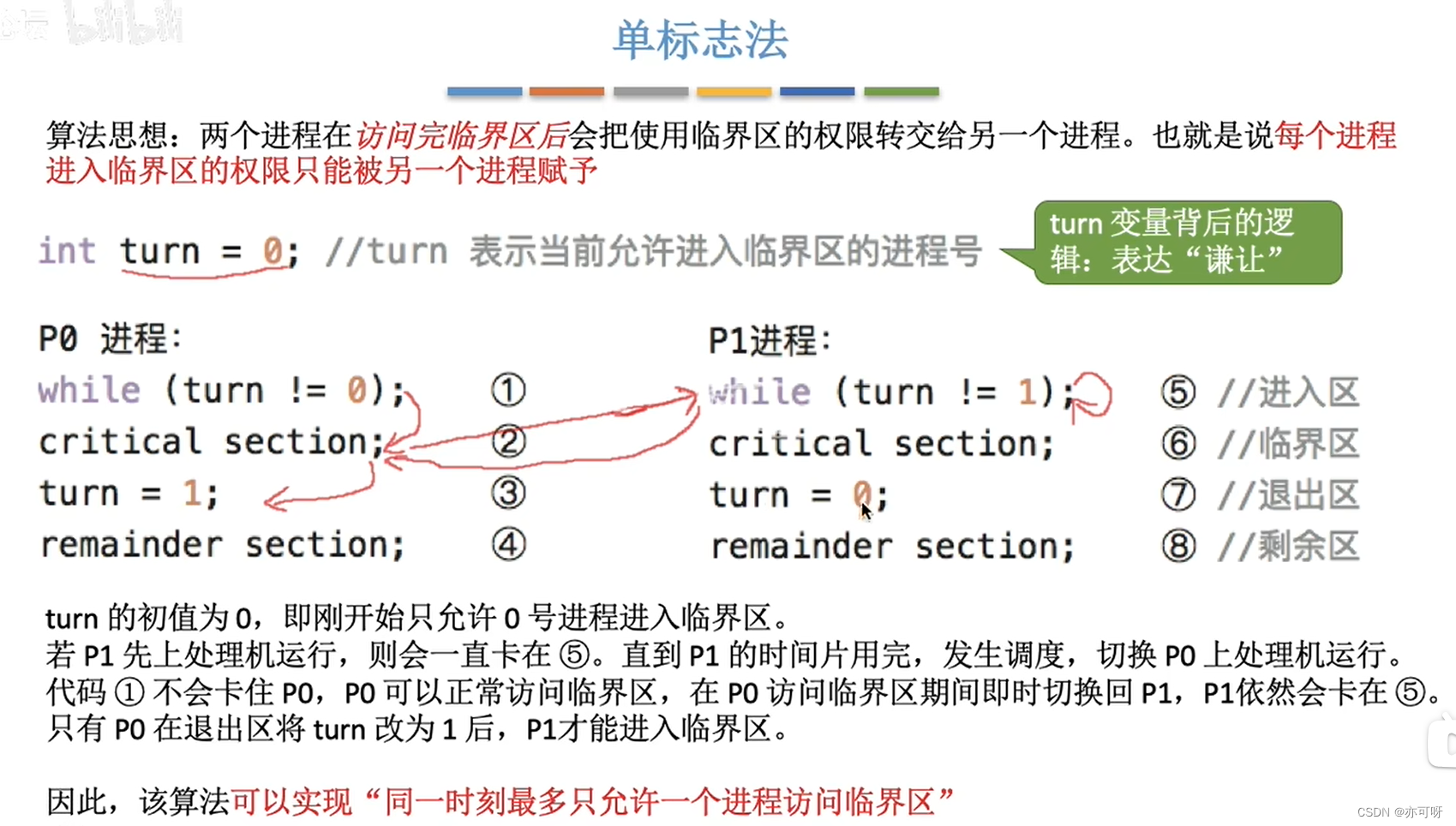
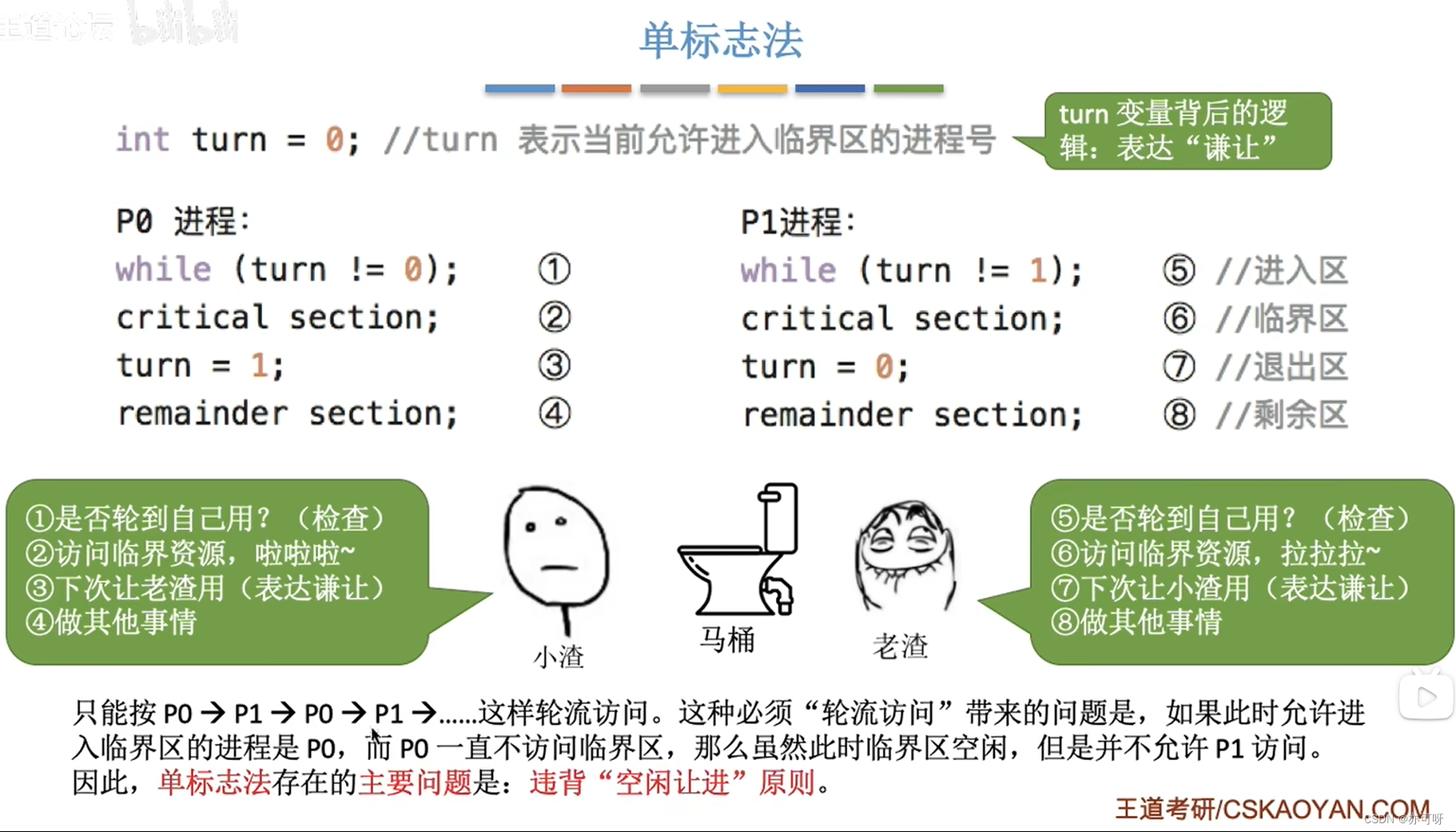
单标志法
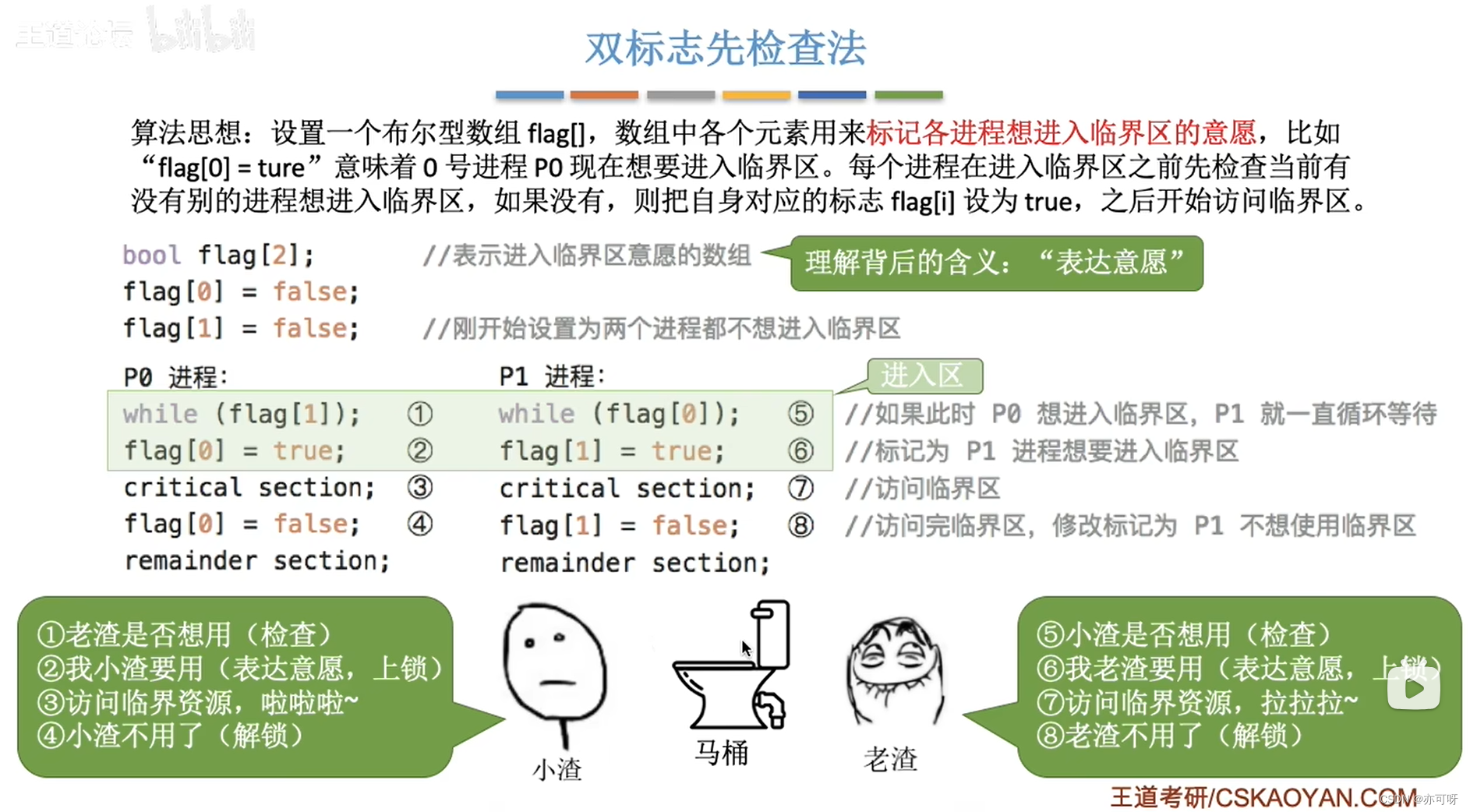
双标志先检查法

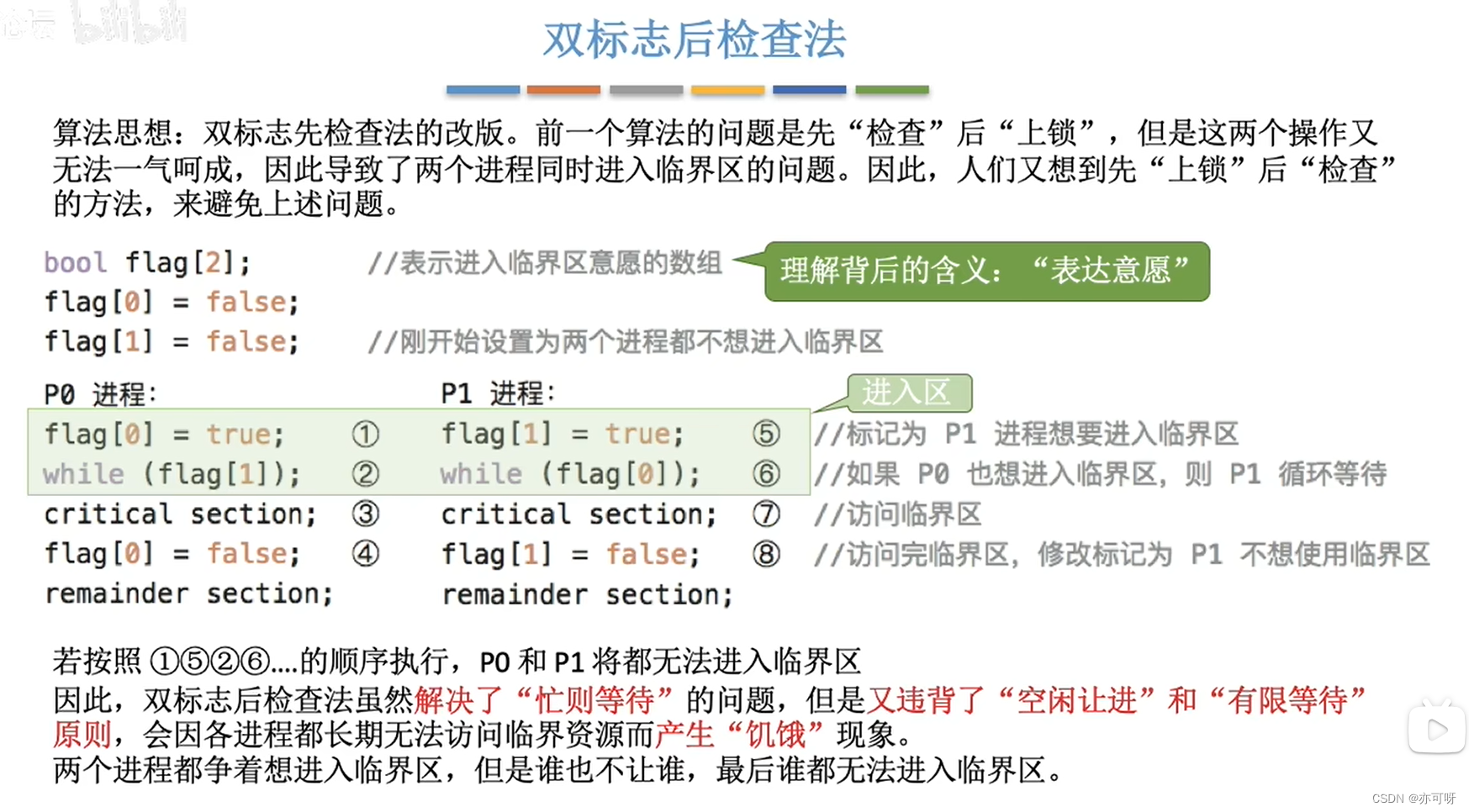
双标志后检查法
peterson
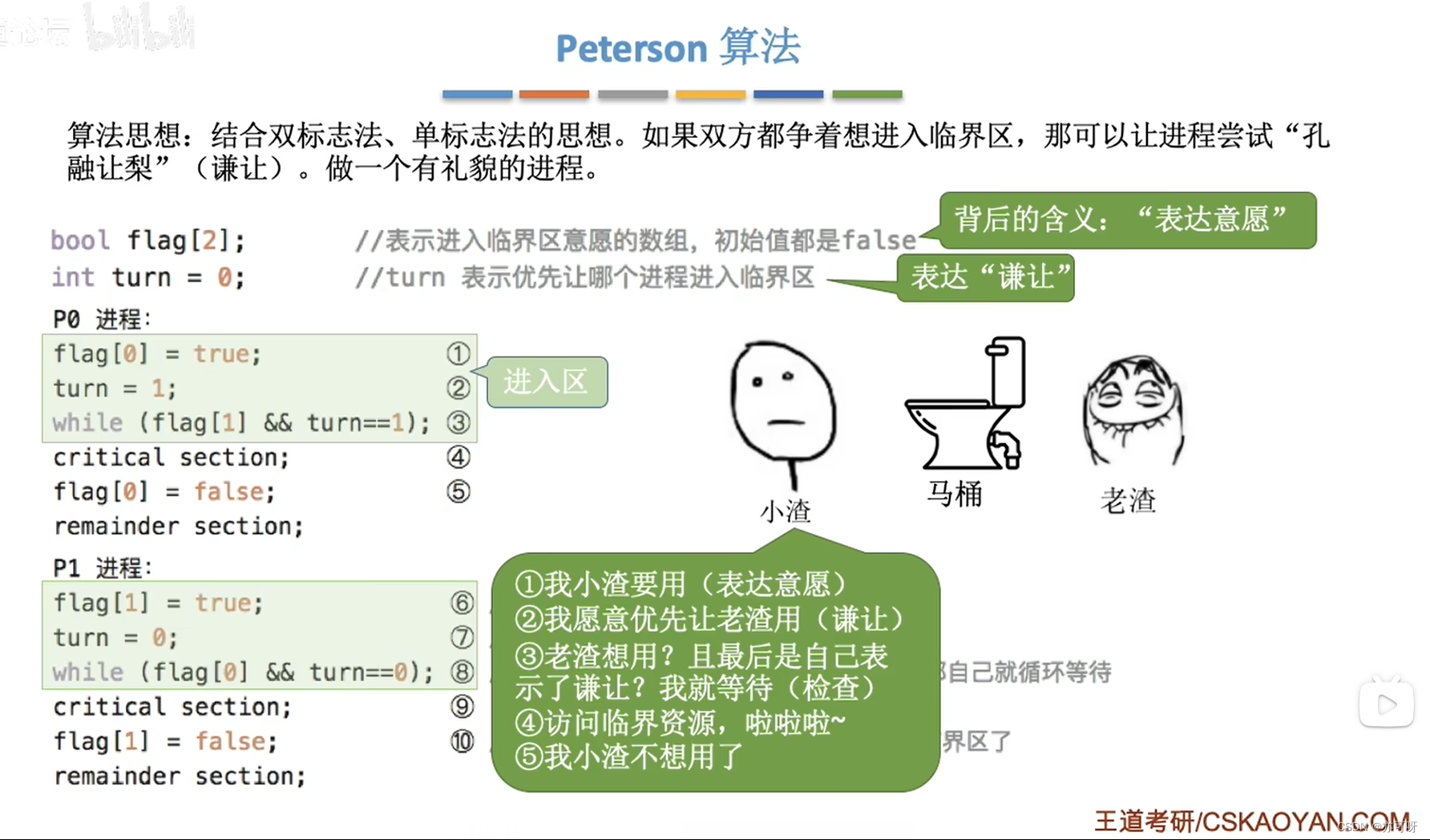
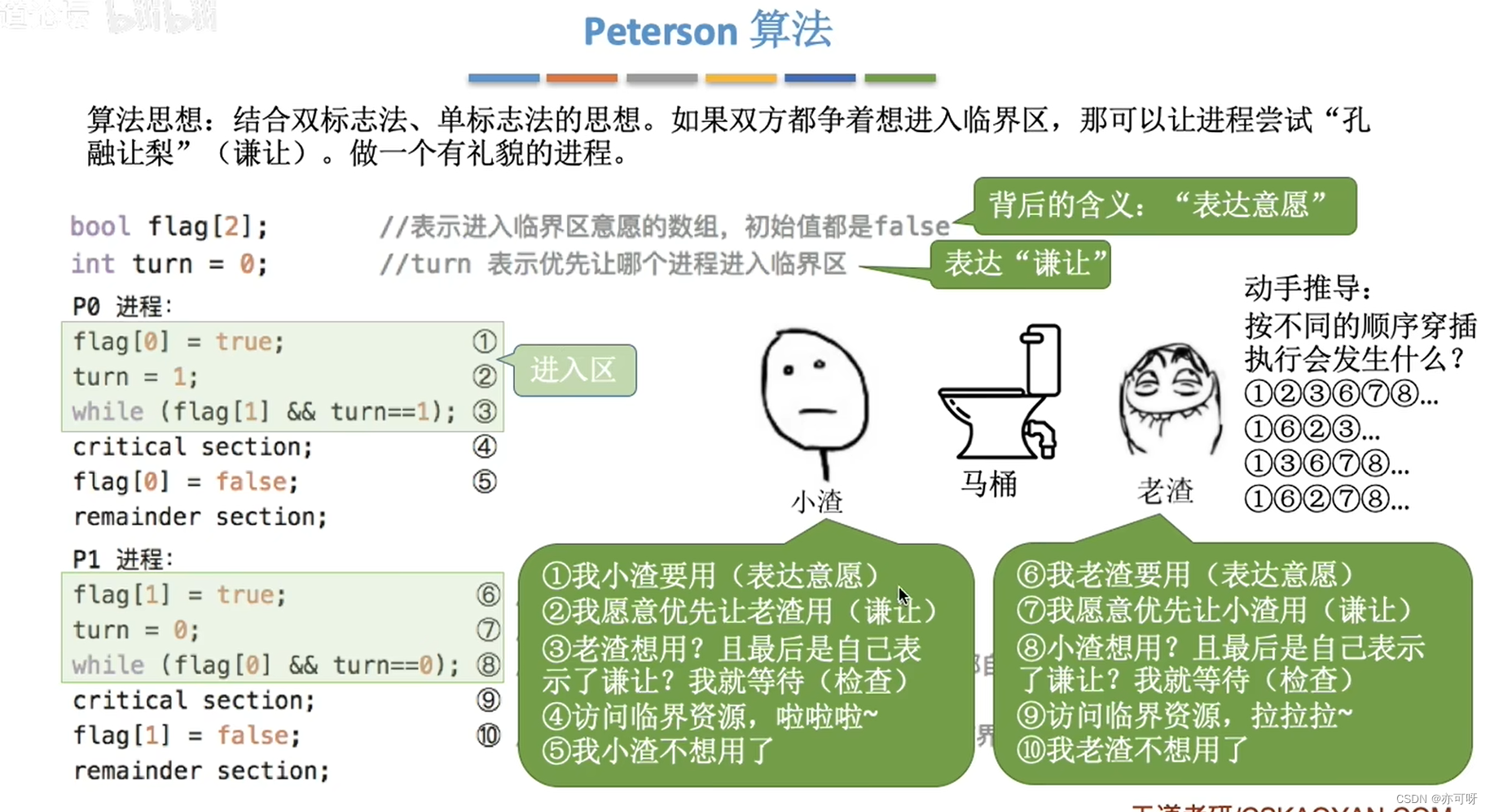
不建议直接钻到代码里面, 而是要先理解那些逻辑关系
\quad
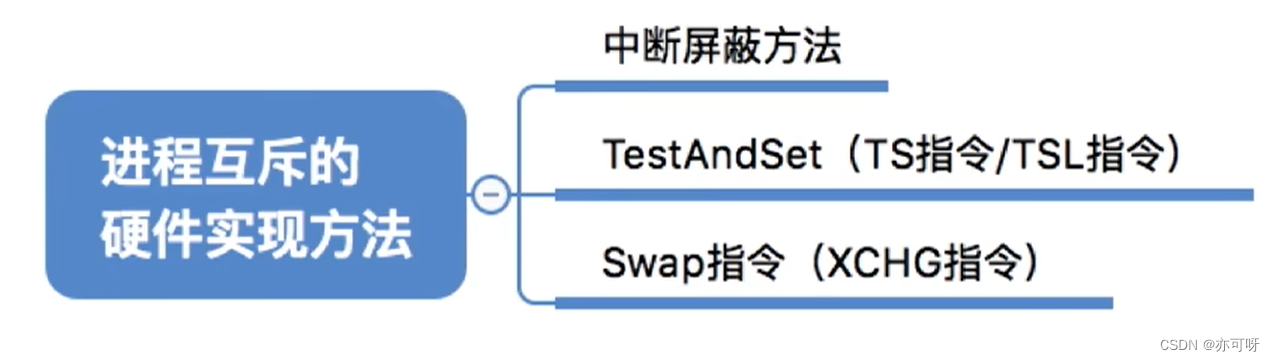
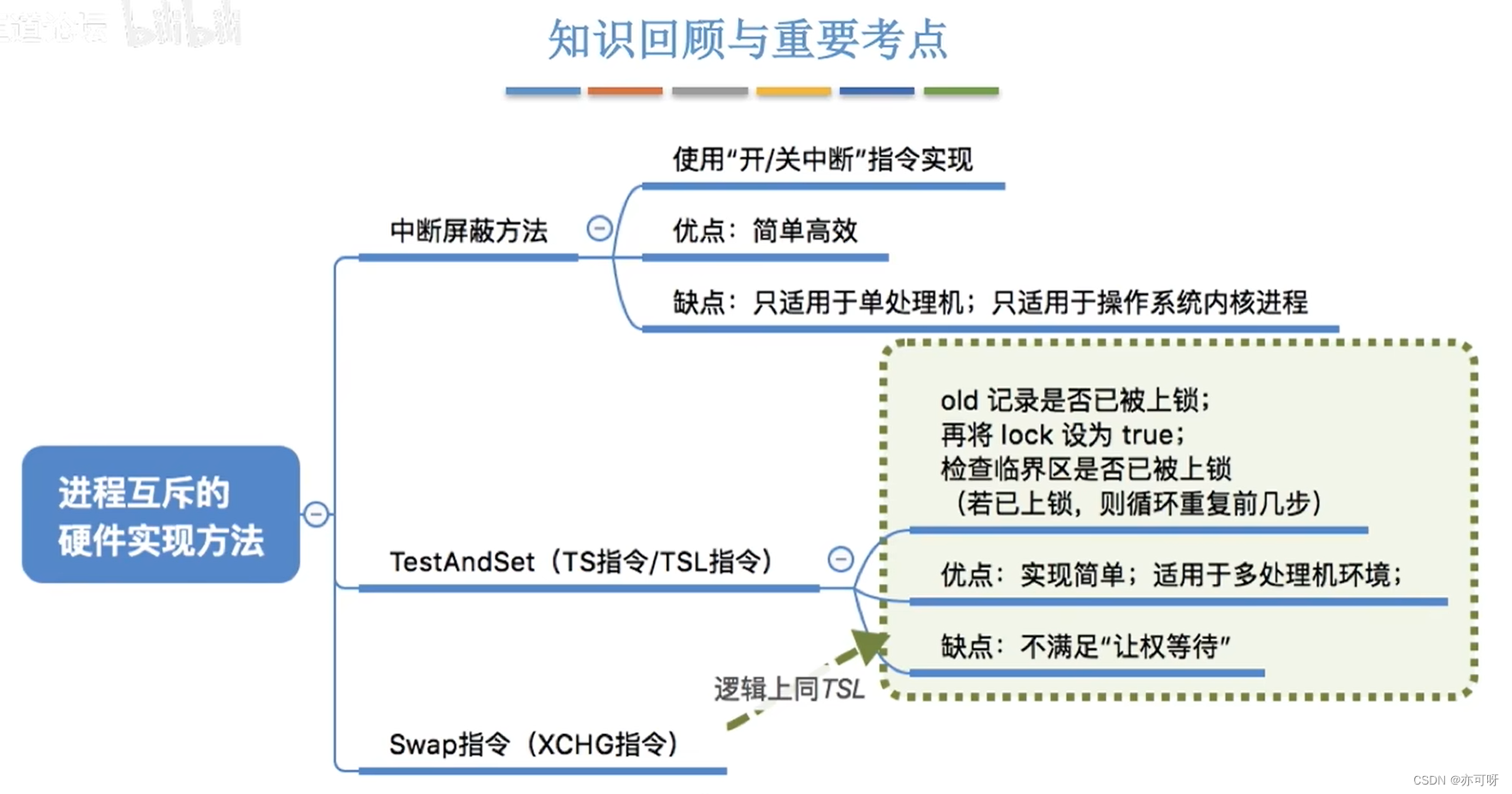
四. 进程互斥硬件实现
\quad
\quad
4.1 中断屏蔽方法
\quad
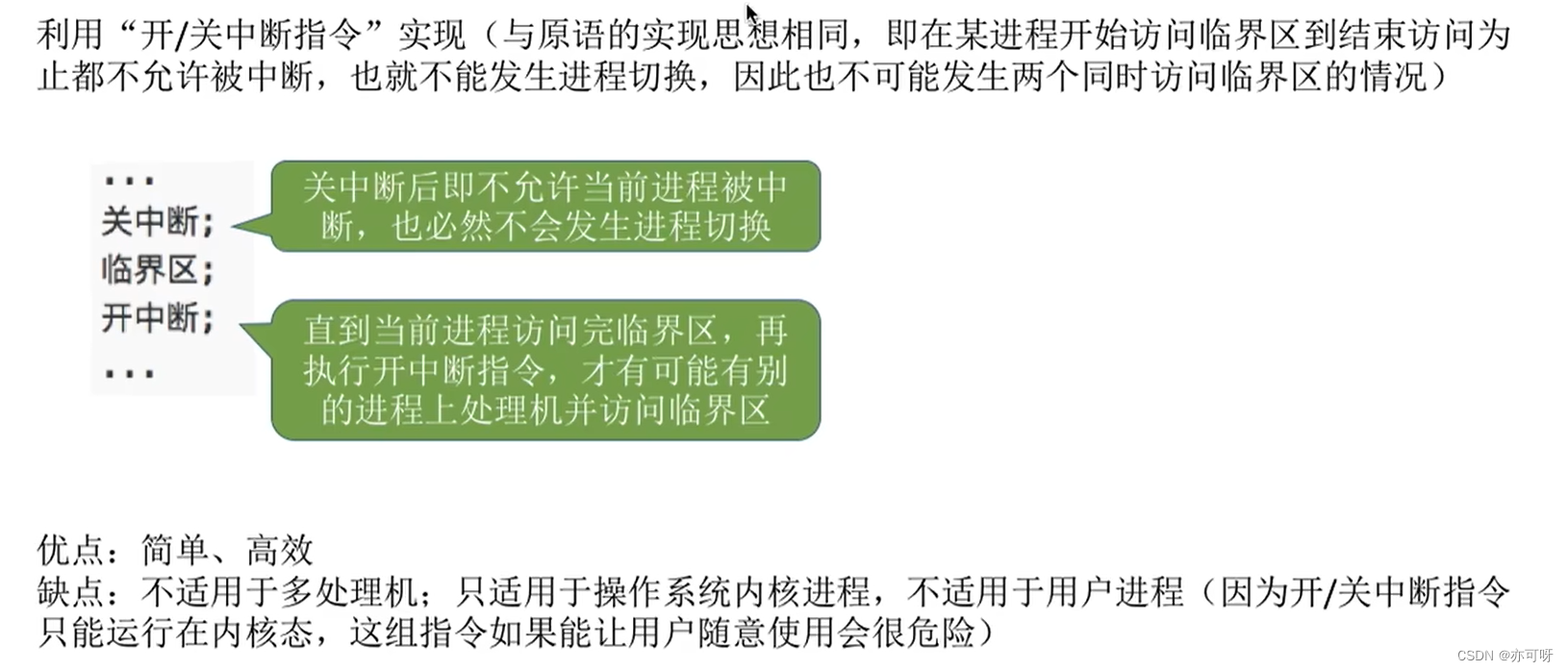
关中断和开中断的指令权限很大
\quad
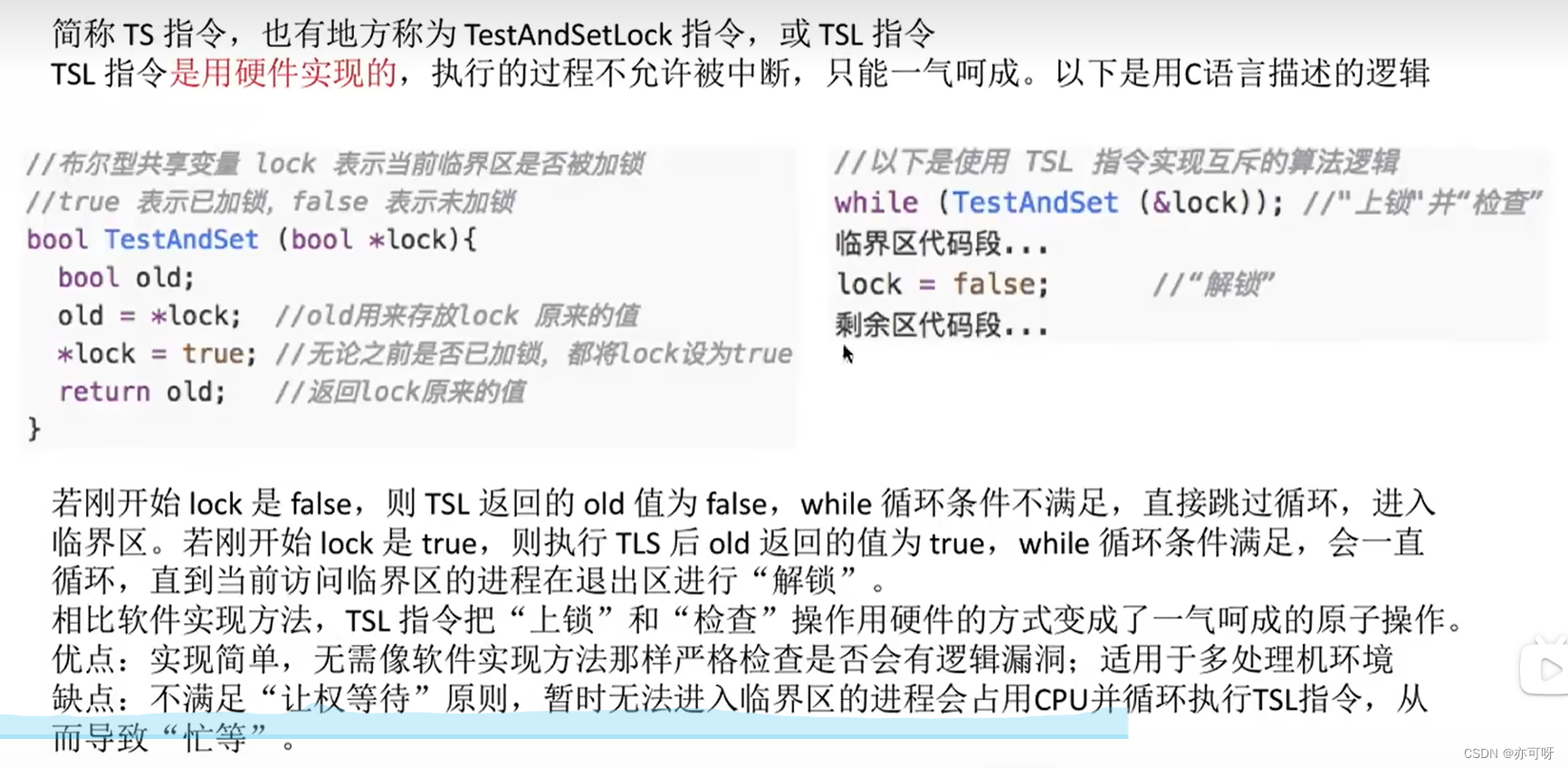
4.2 test and set 指令
\quad
\quad
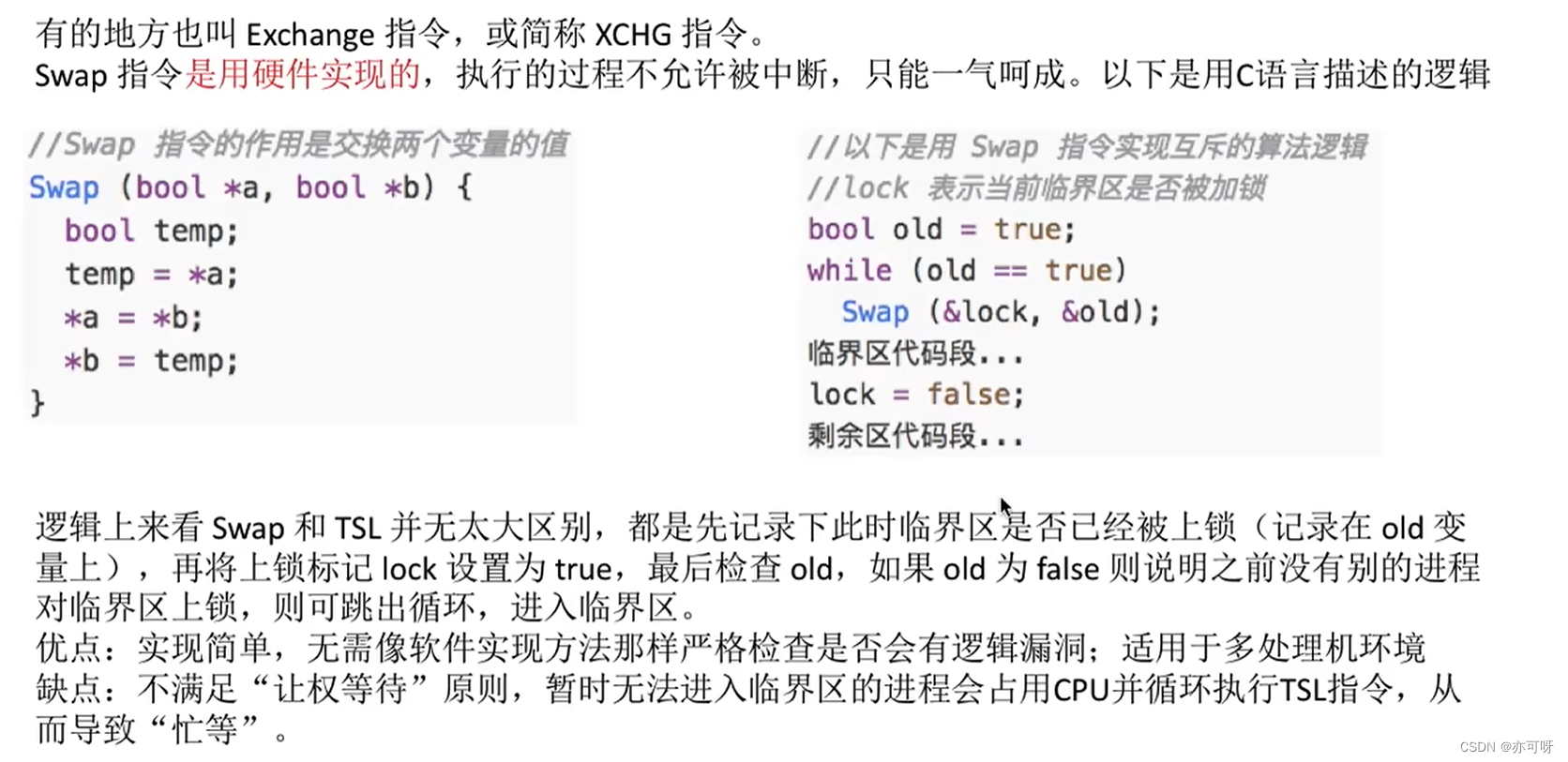
4.3 Swap 指令
\quad
\quad
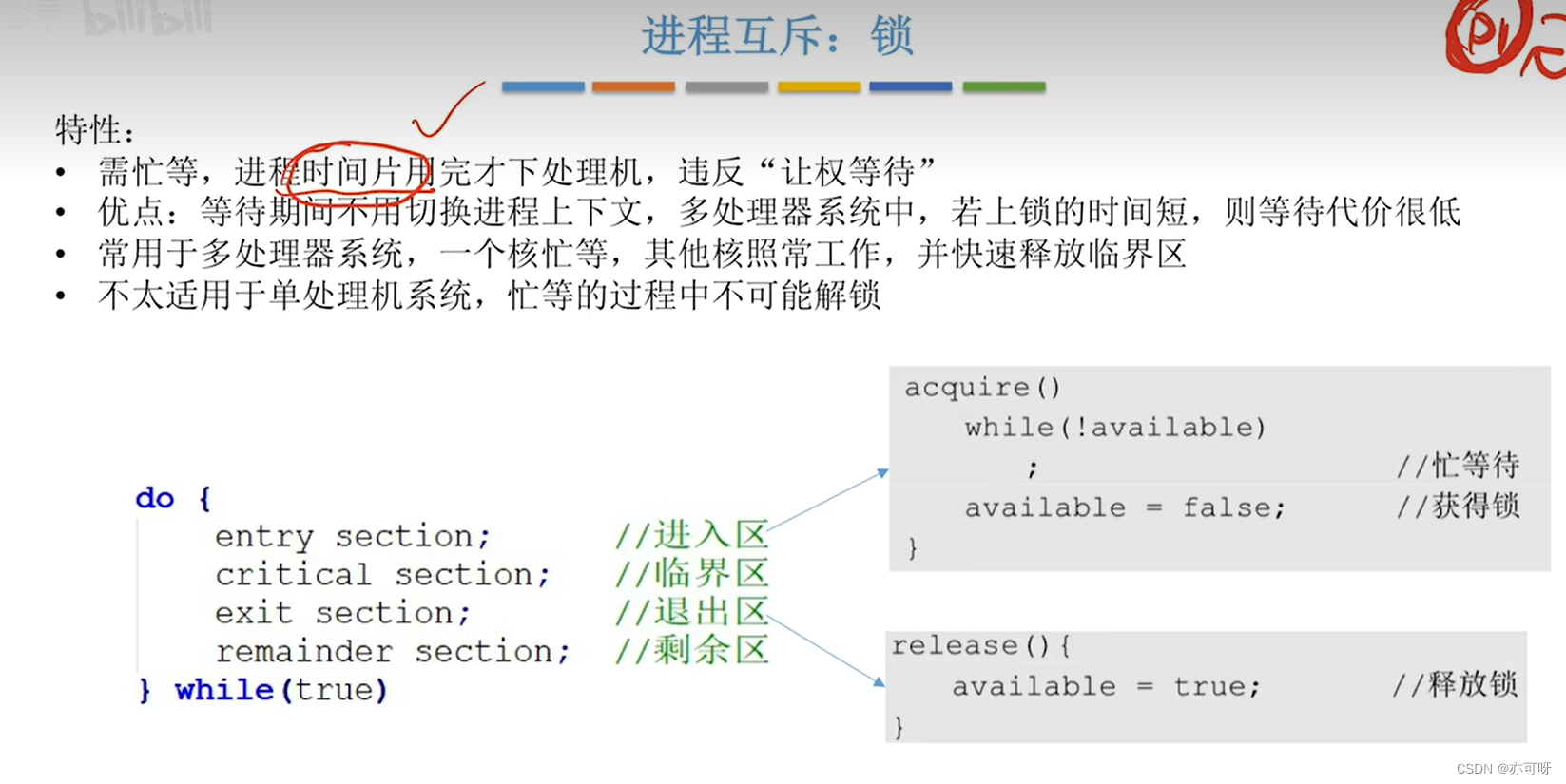
五. 互斥锁
\quad
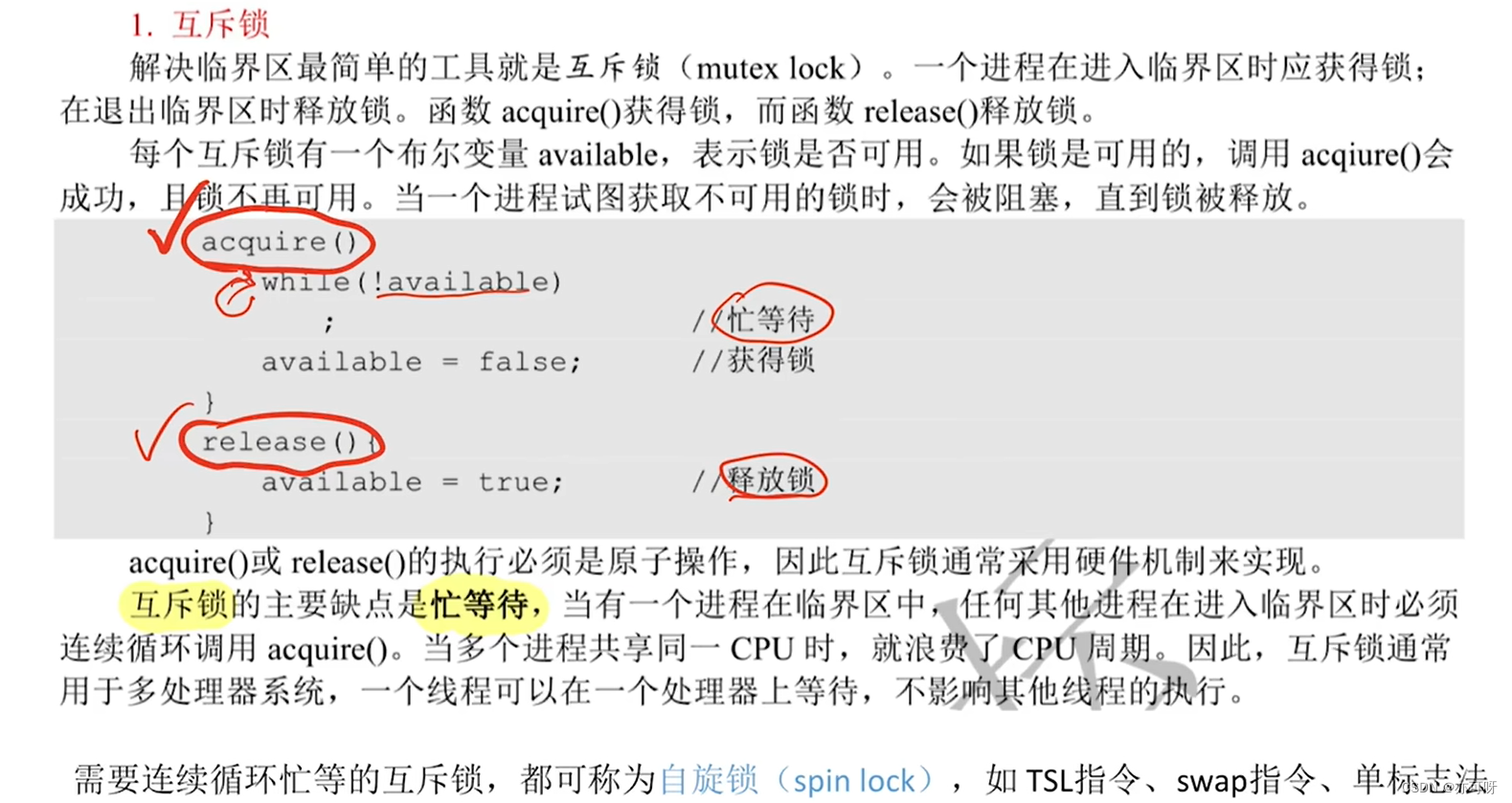
忙等并不一定一直占用处理机, 时间片用完还是会下处理机
\quad
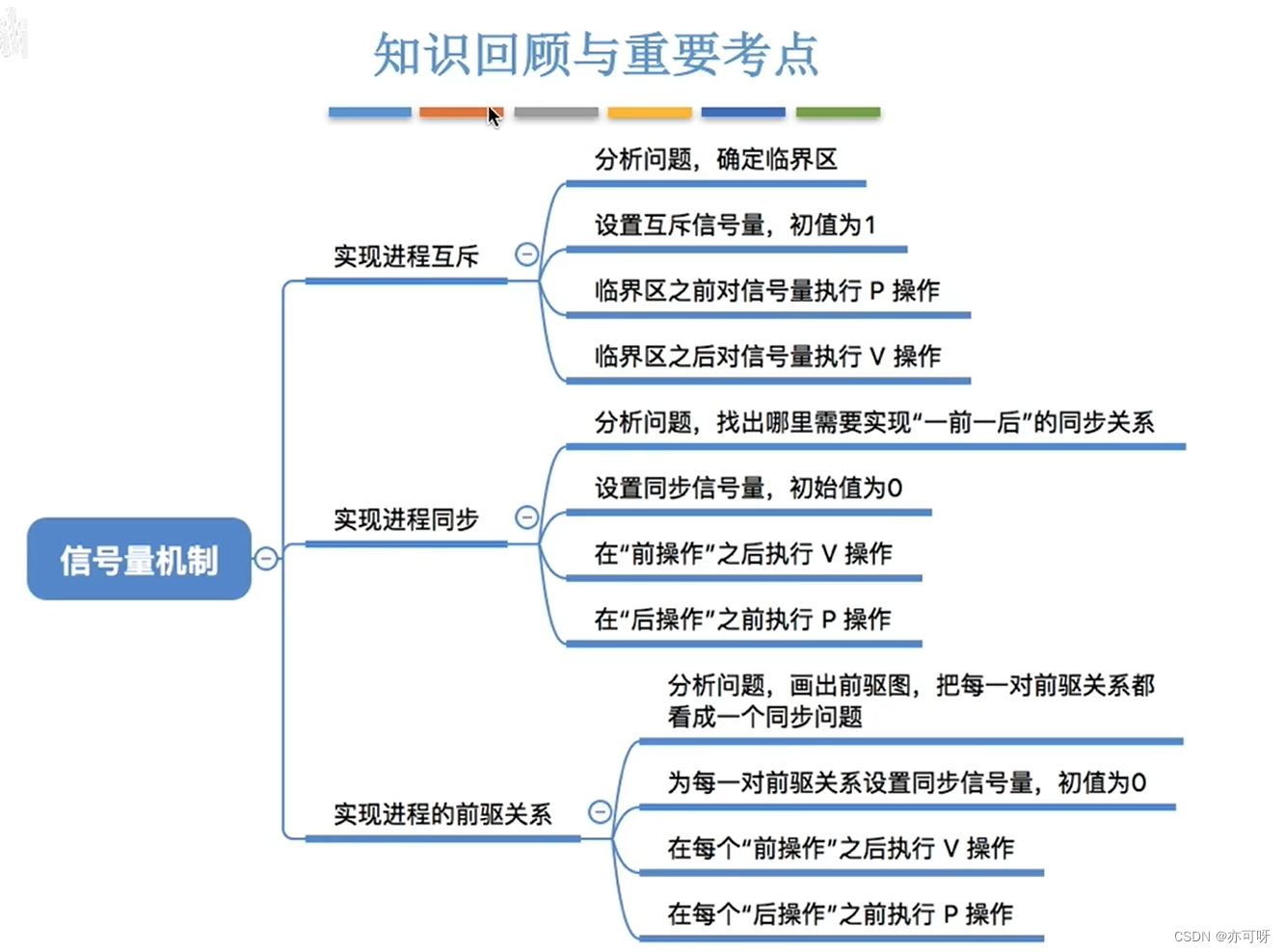
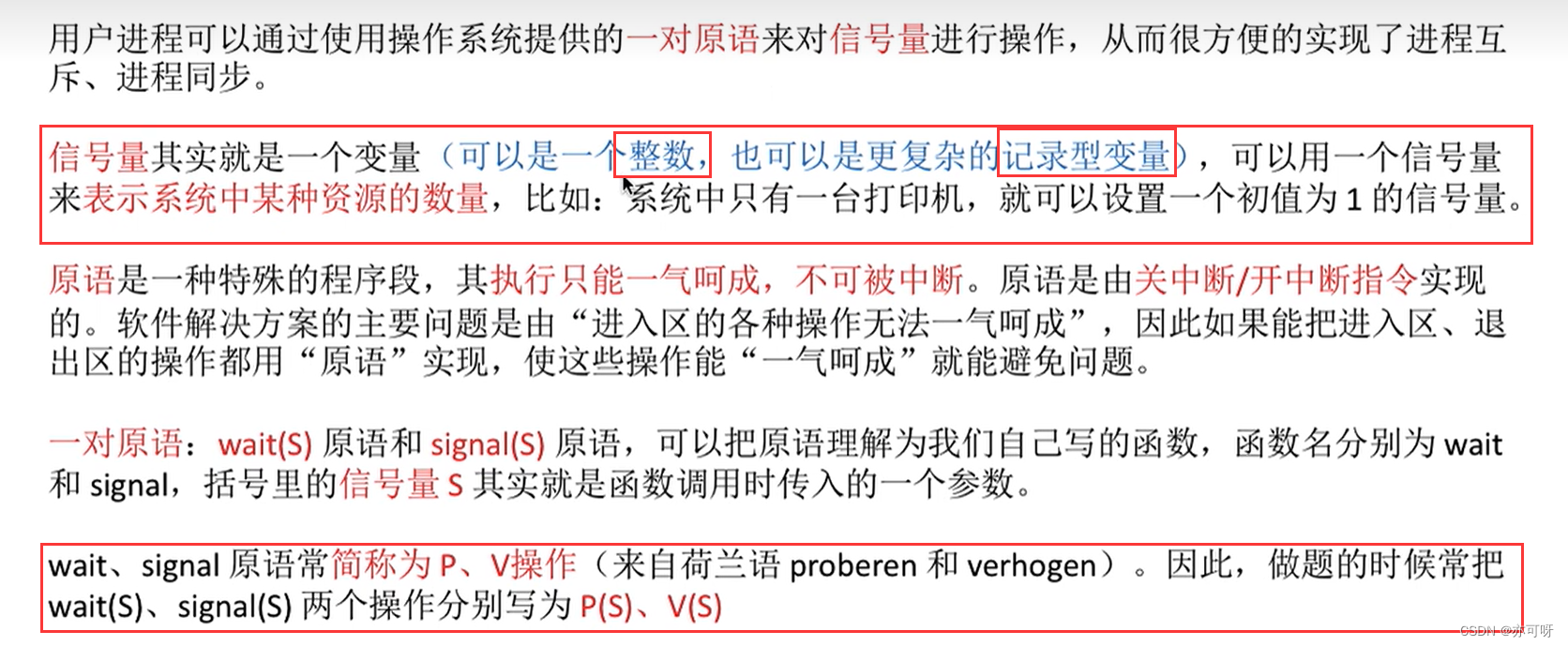
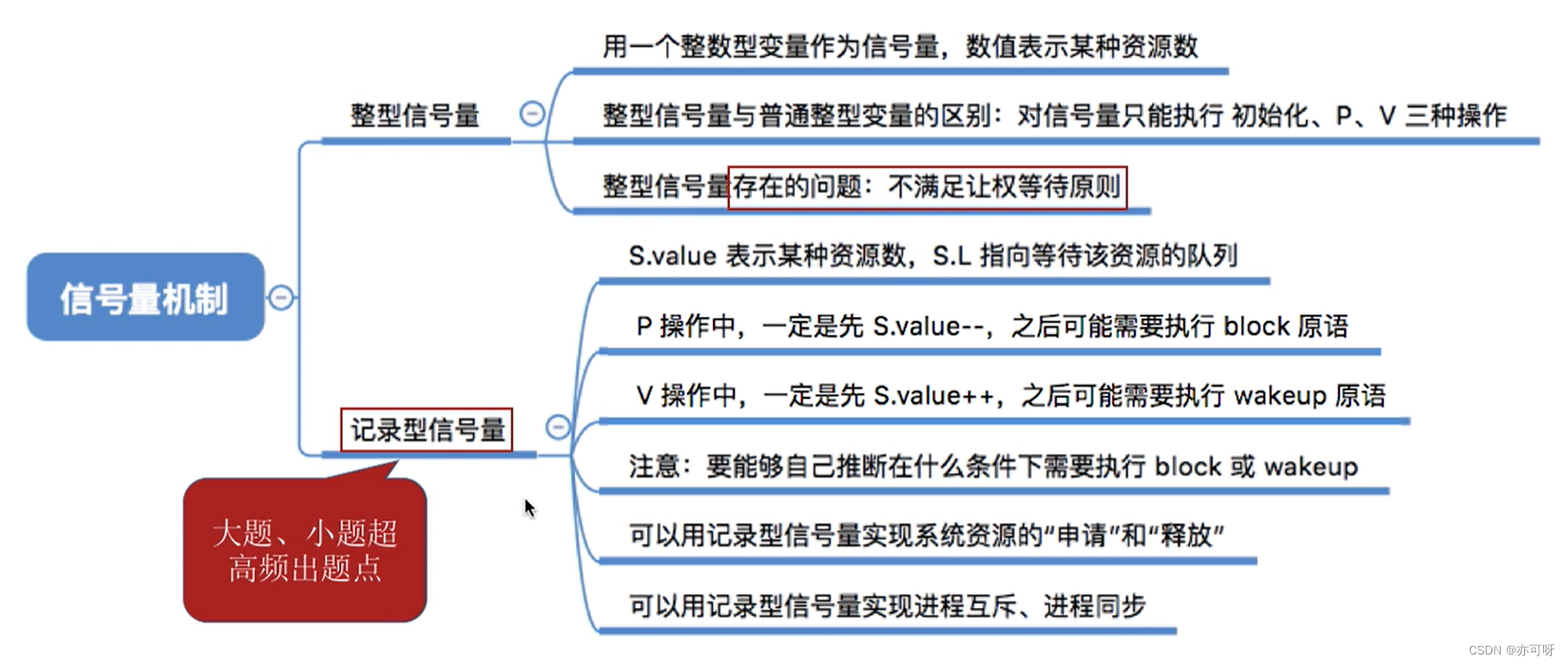
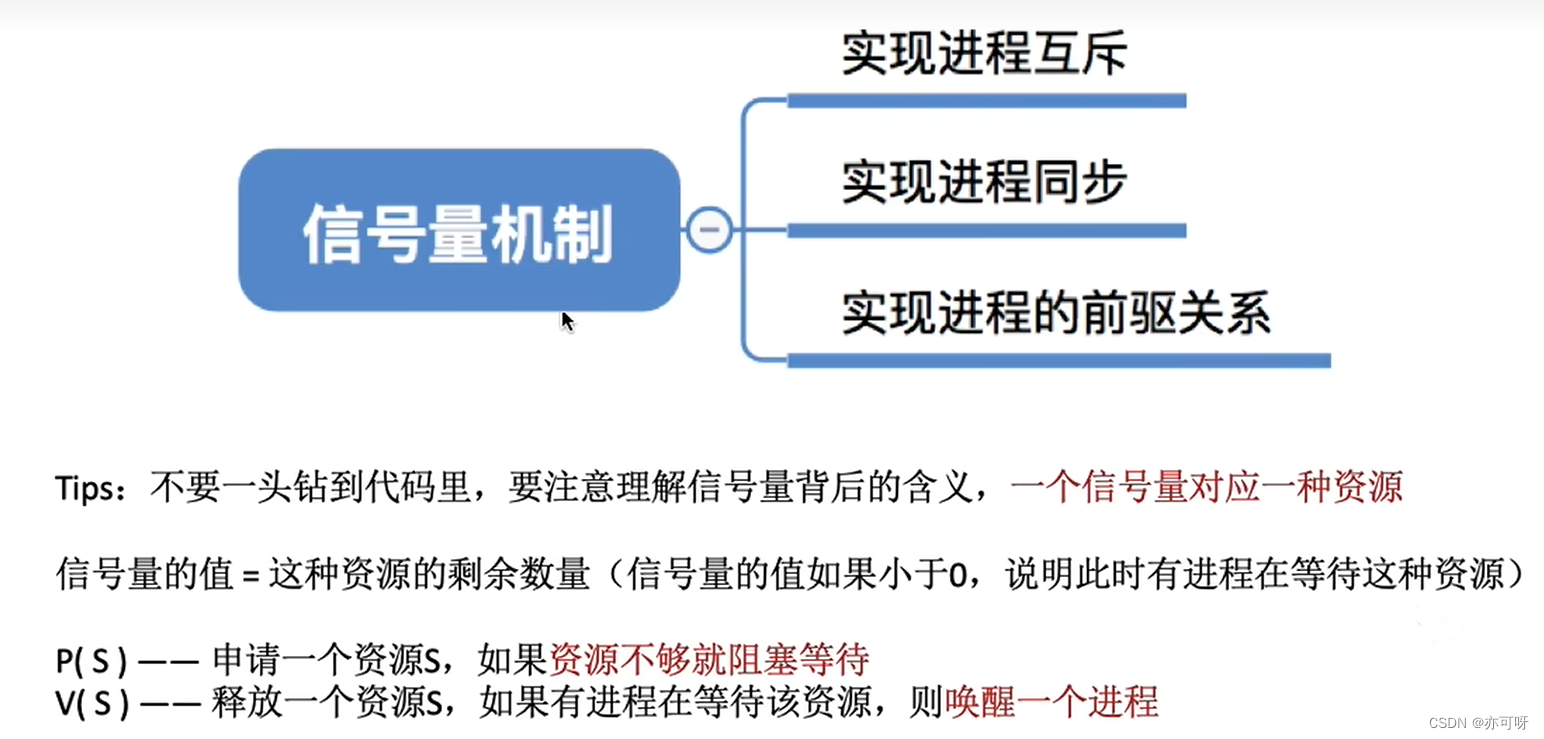
六. 信号量机制
\quad
\quad
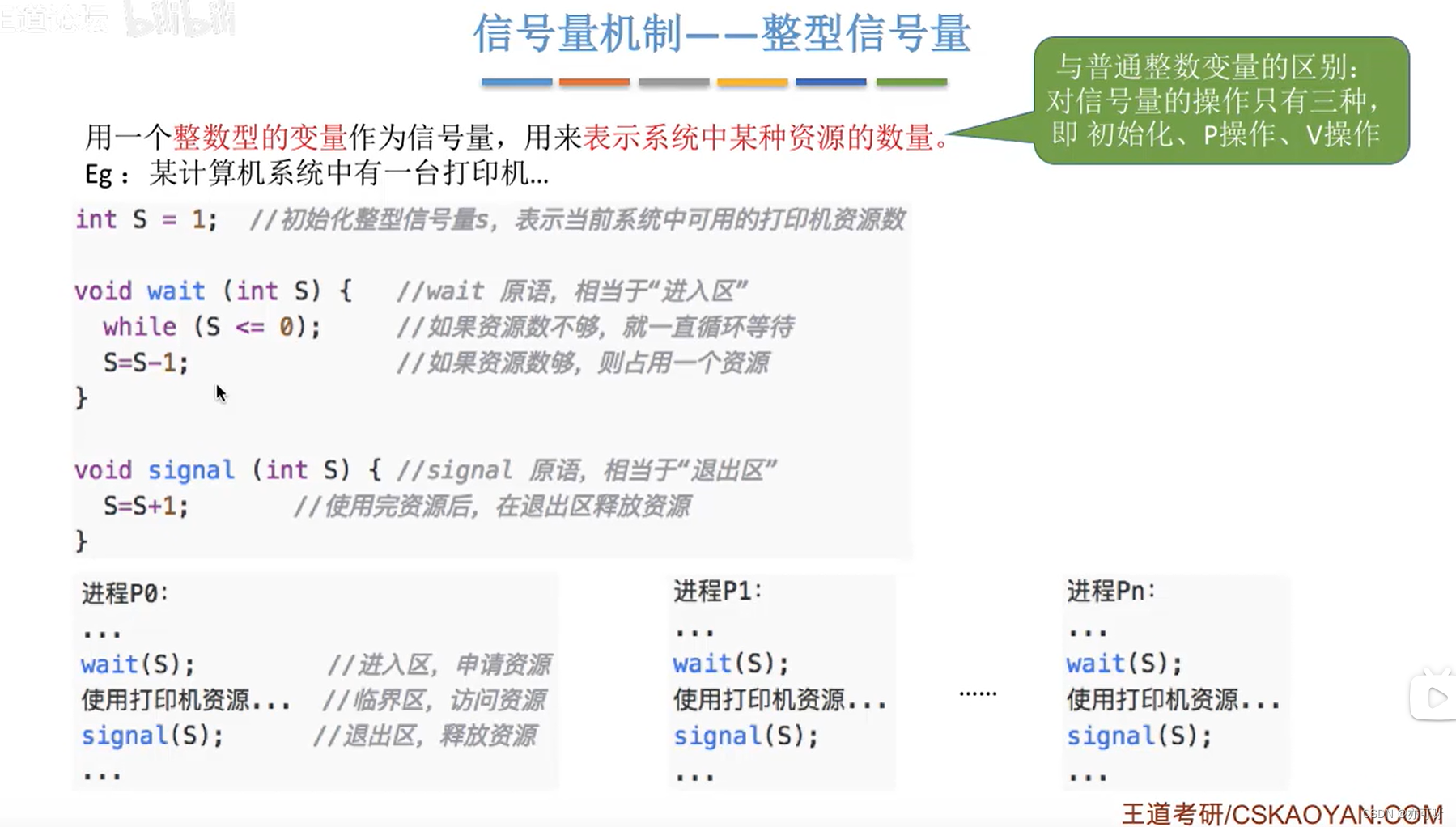
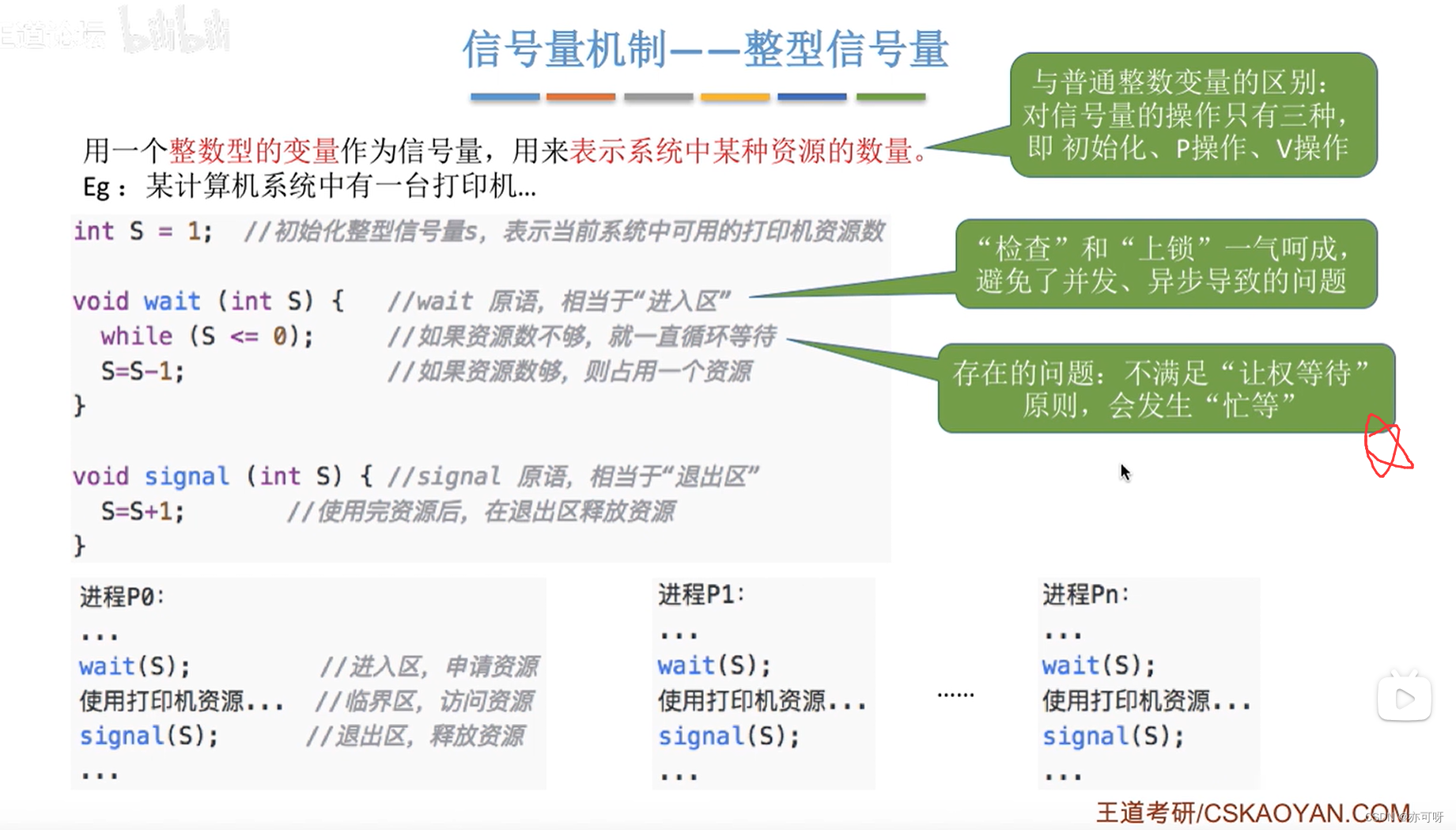
6.1 整型信号量
\quad
\quad
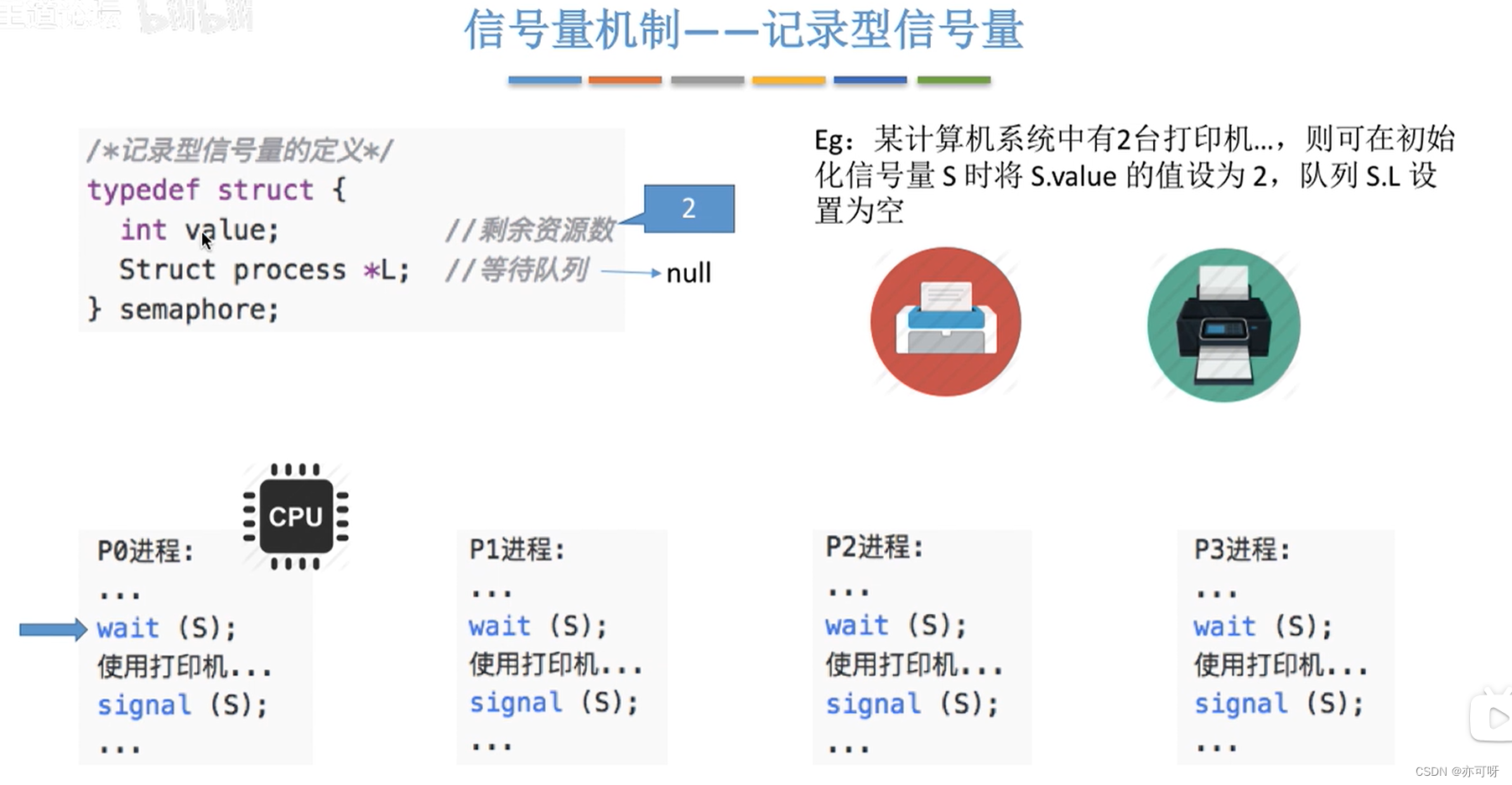
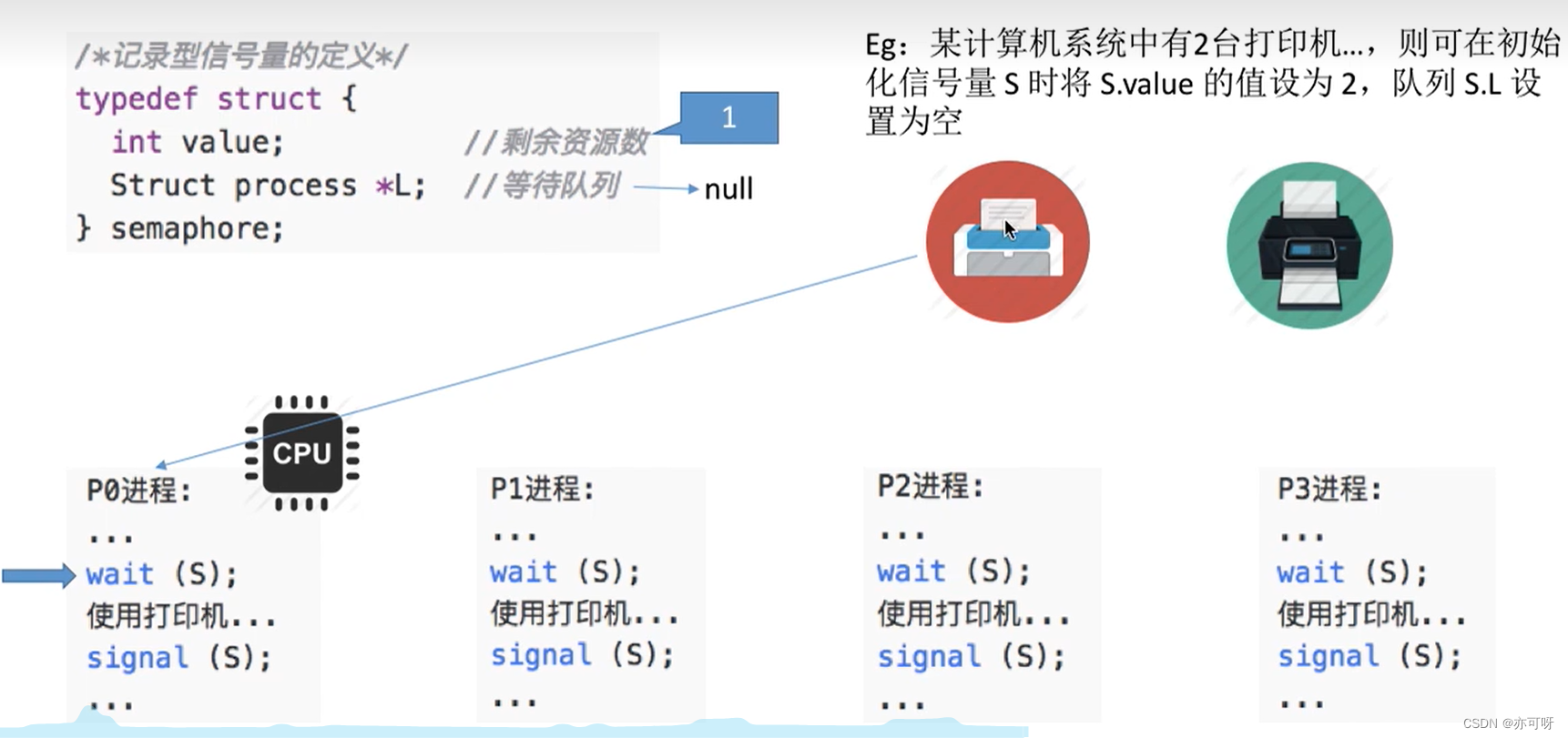
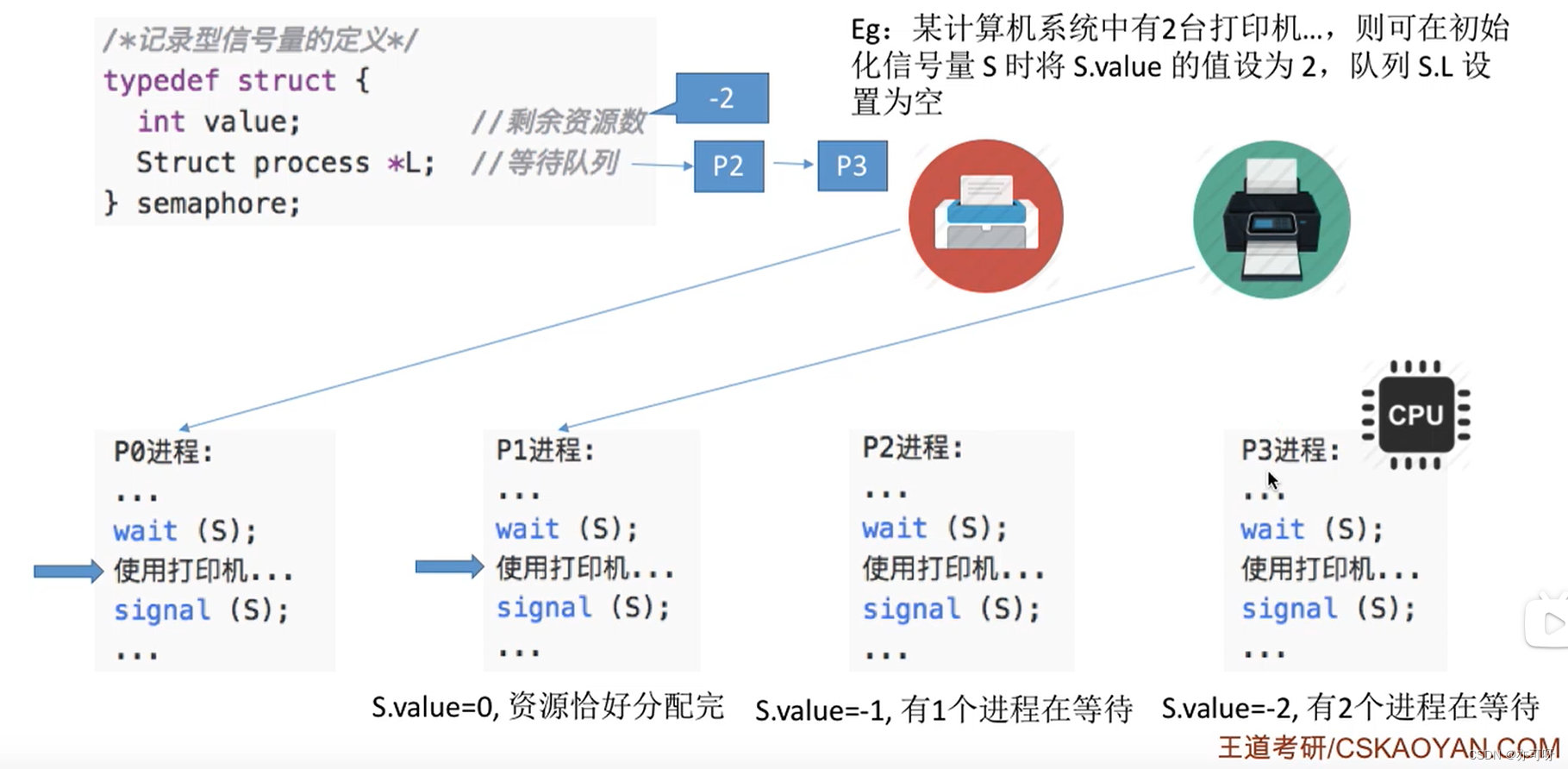
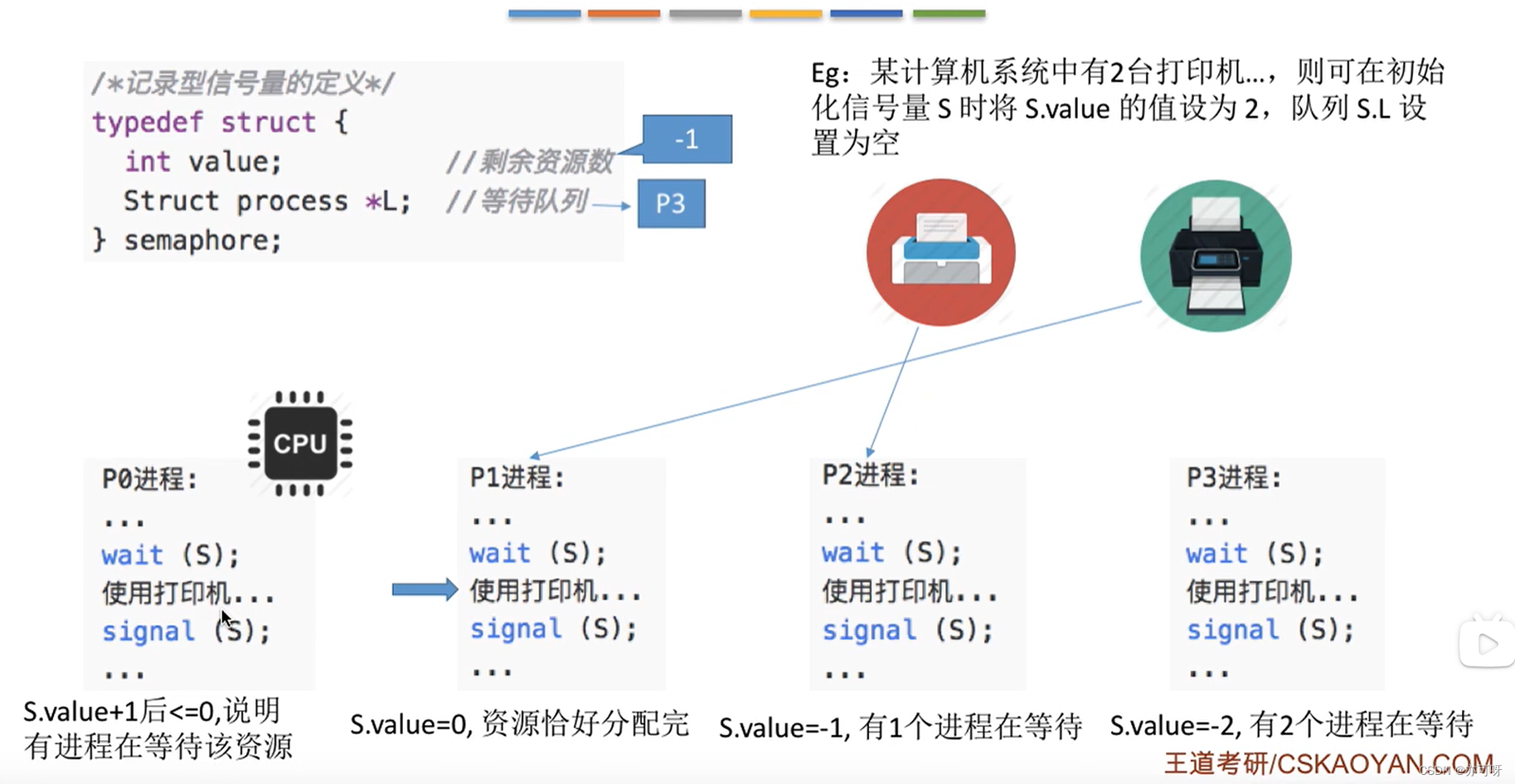
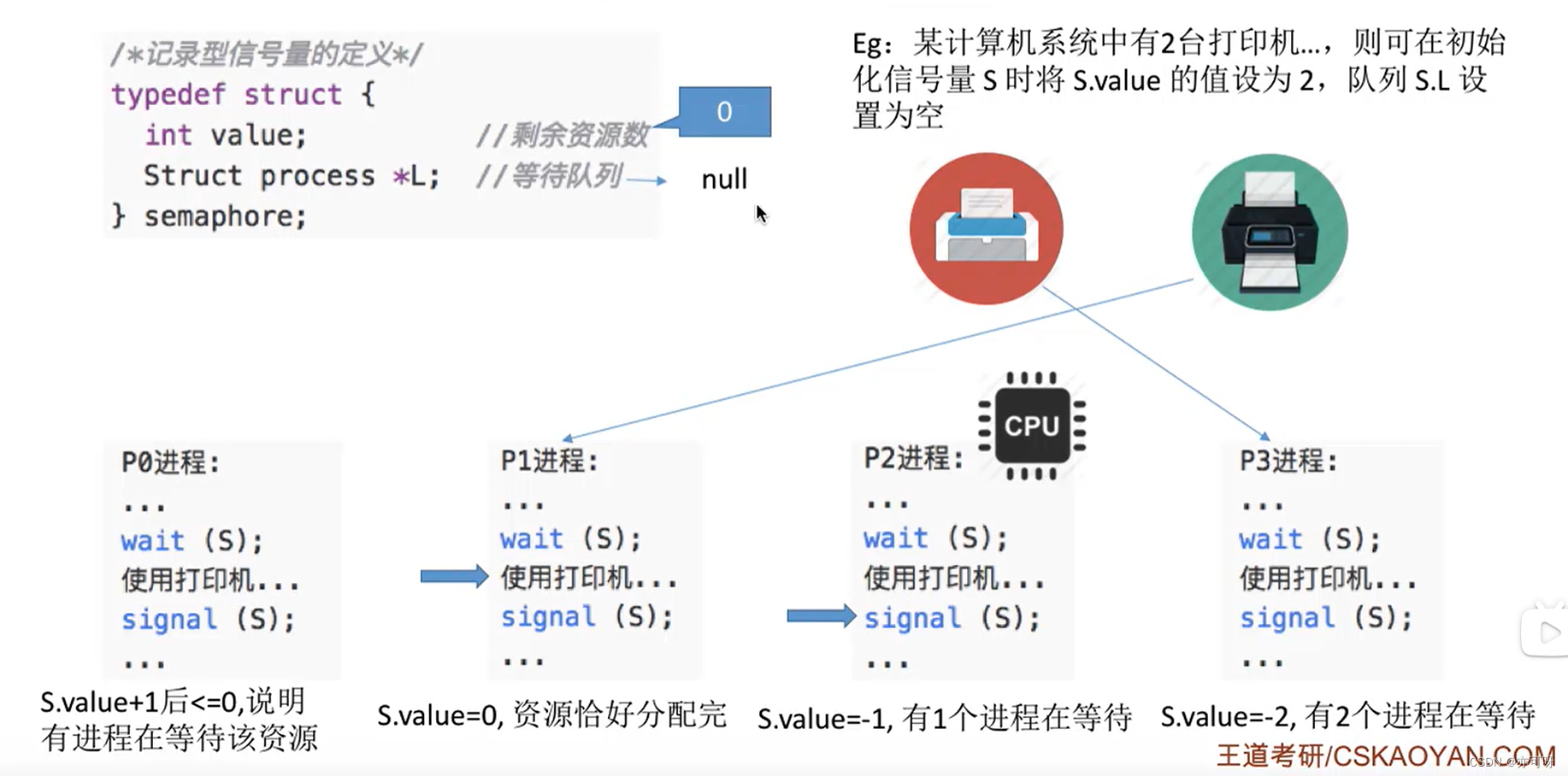
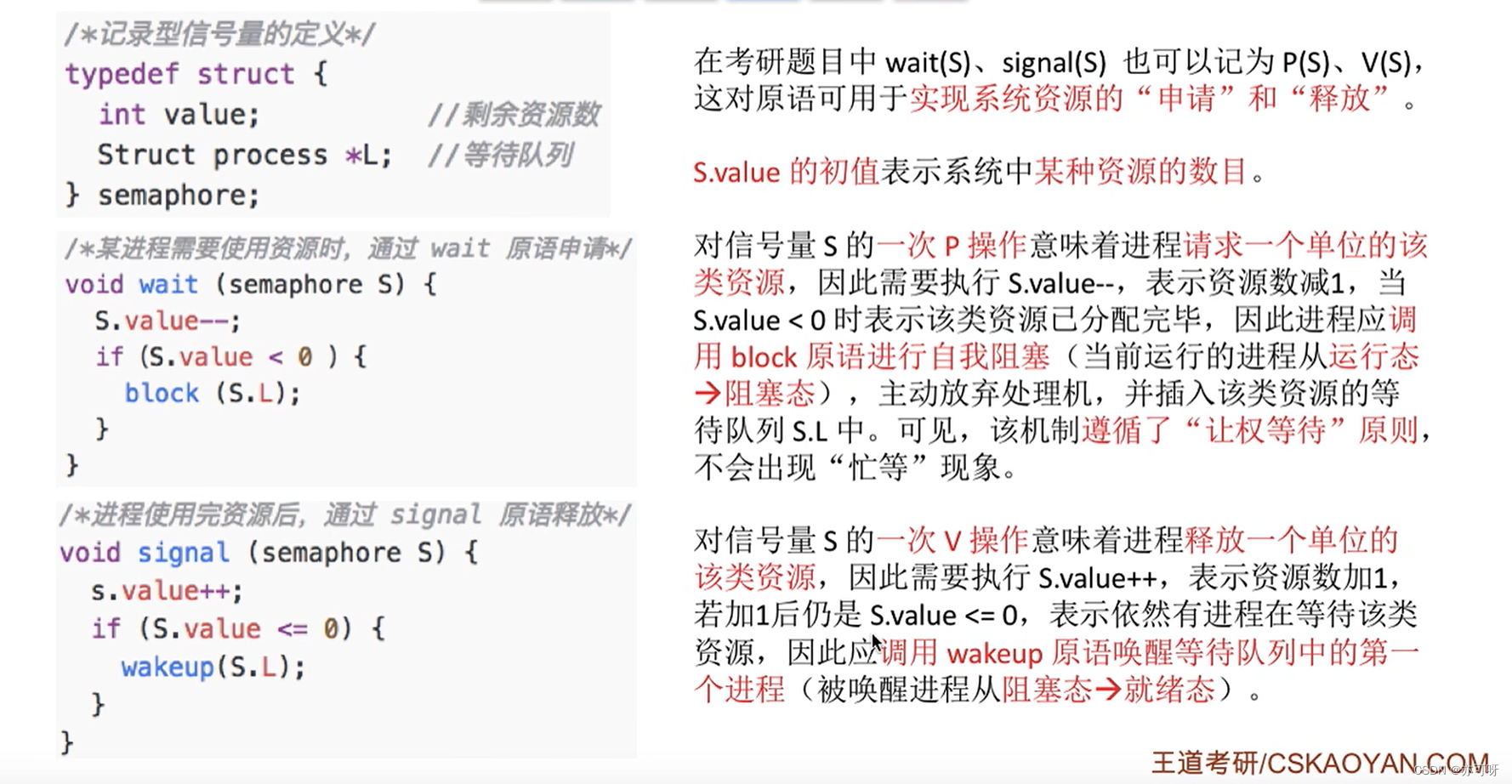
6.2 记录型信号量
\quad
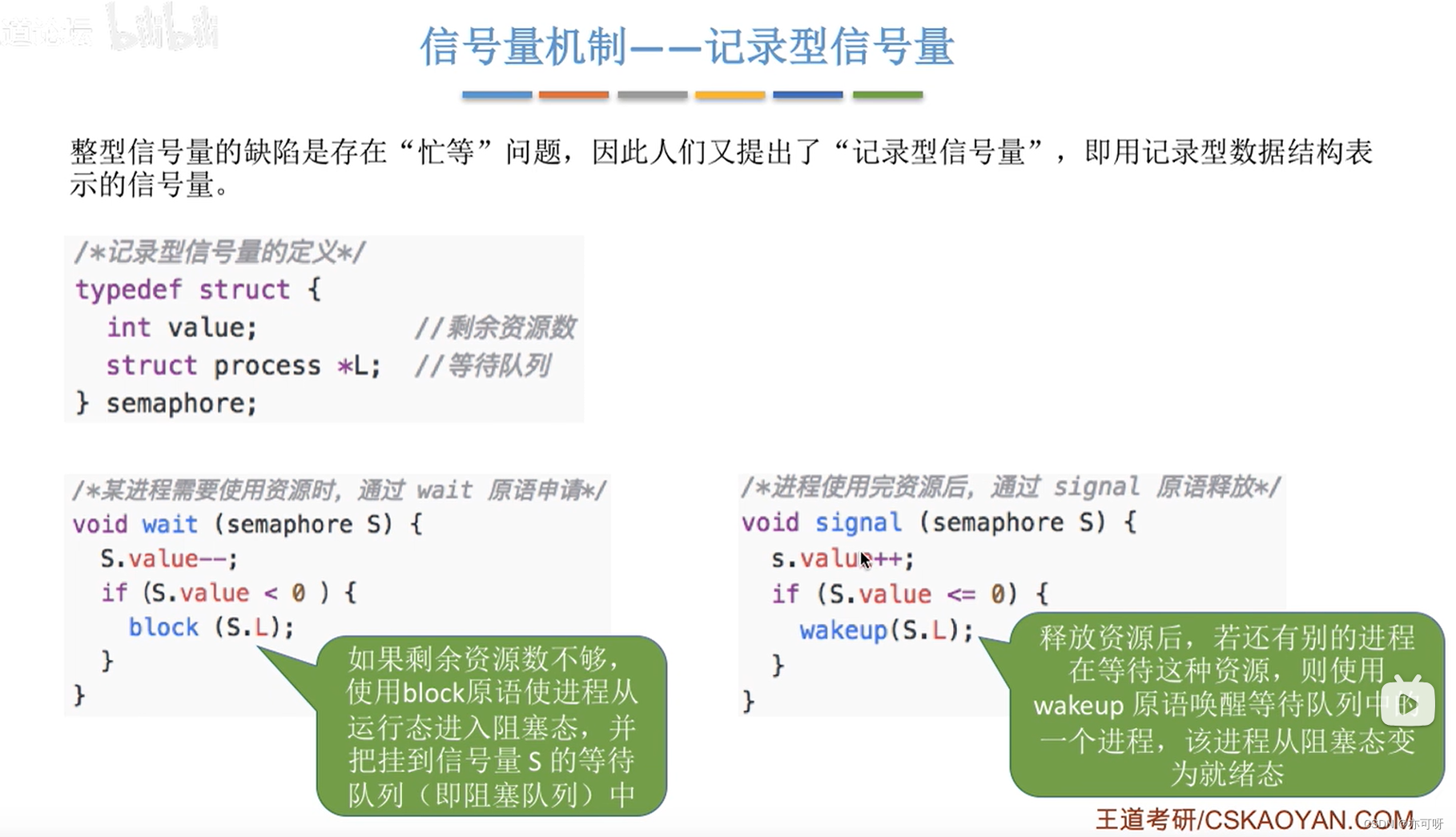

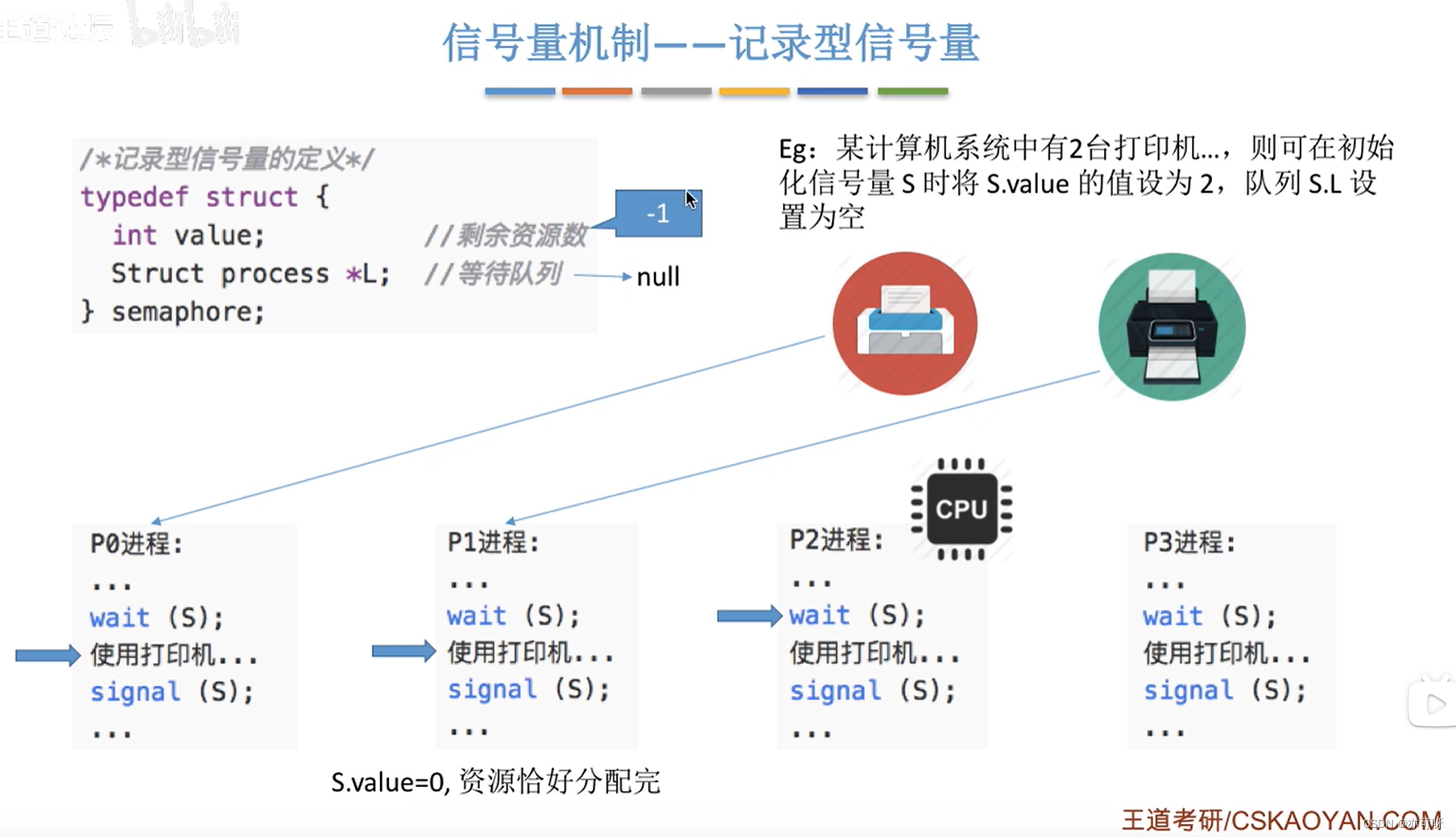
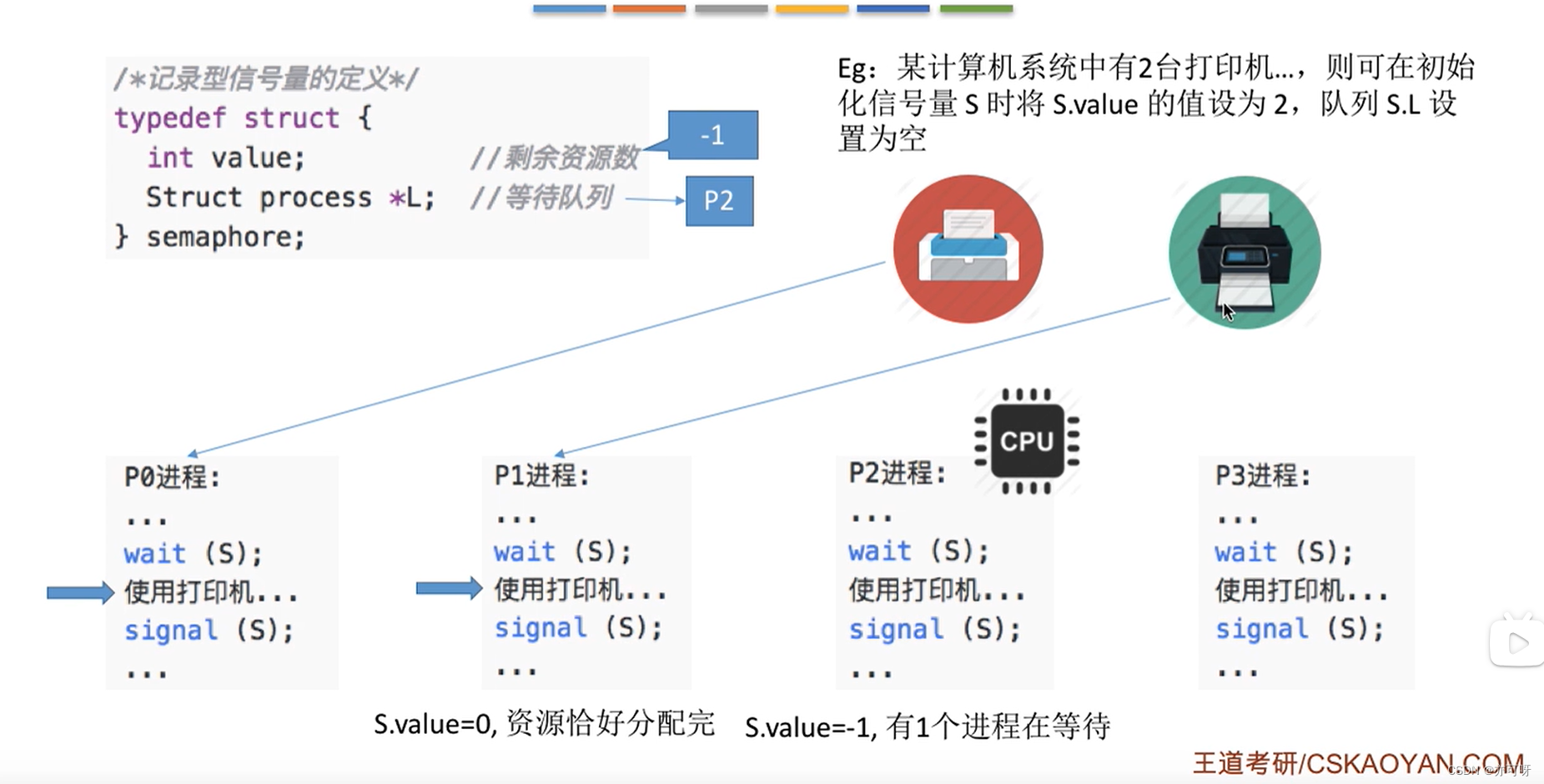
负几就说明有几个进程在等待

\quad
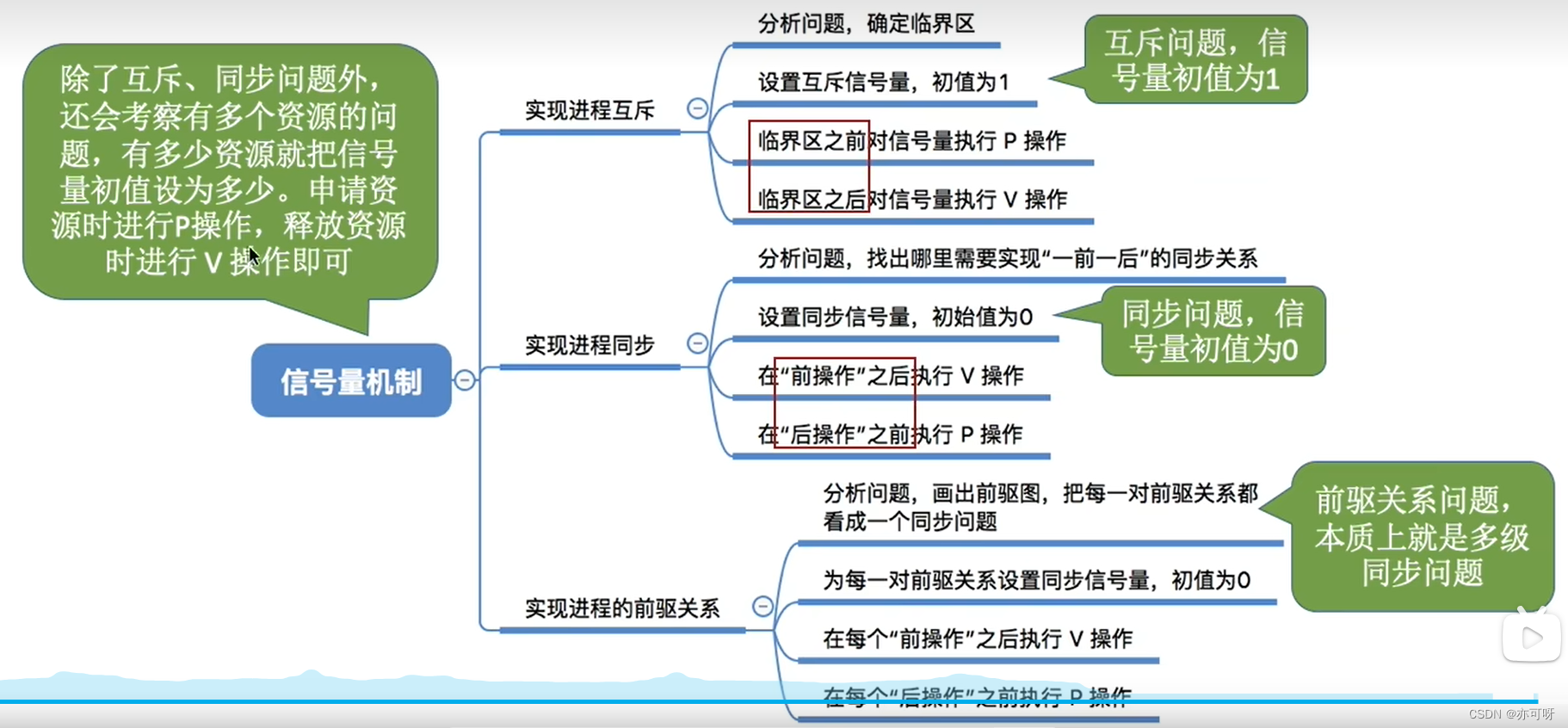
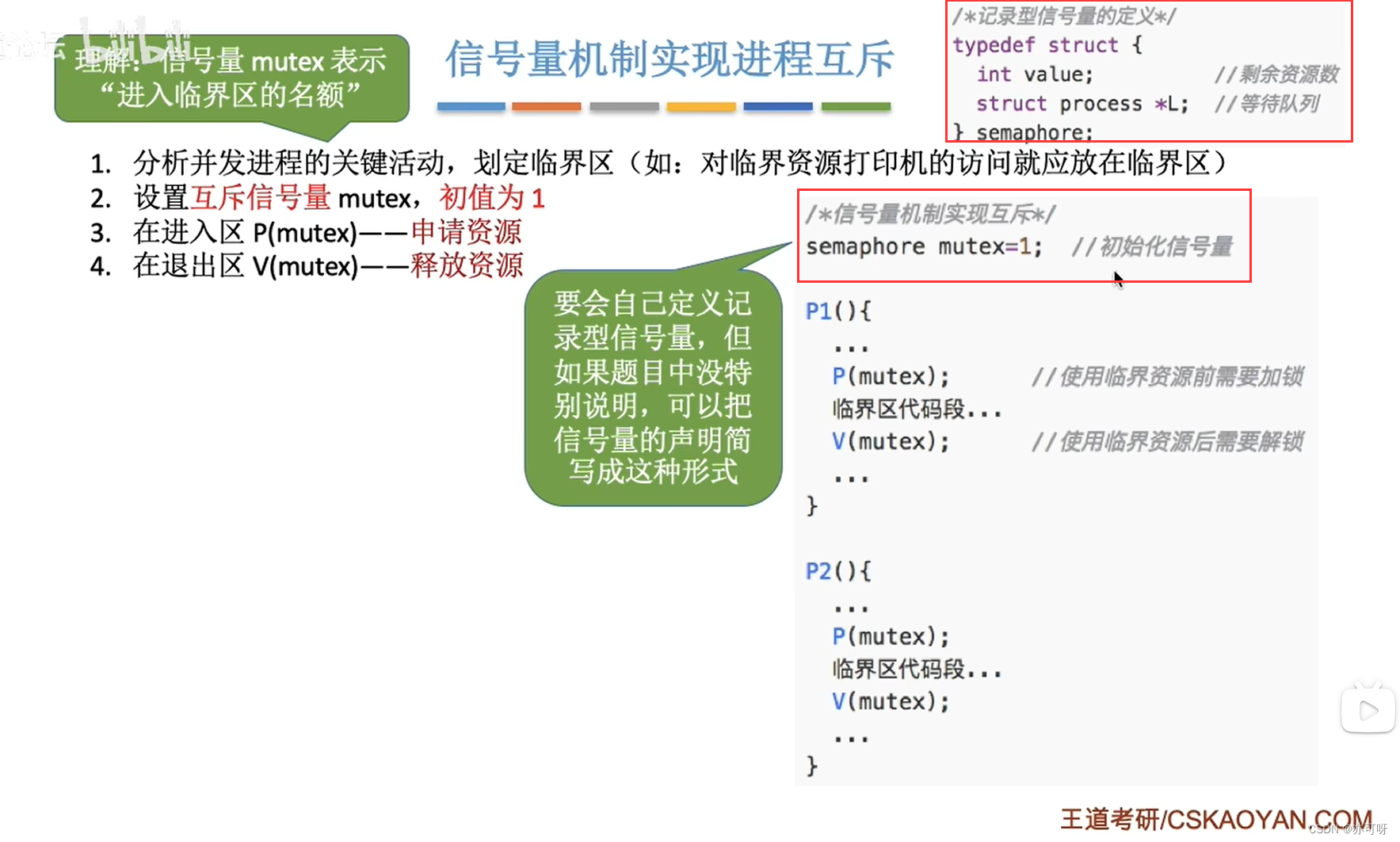
6.3 信号量机制实现进程互斥
\quad
\quad
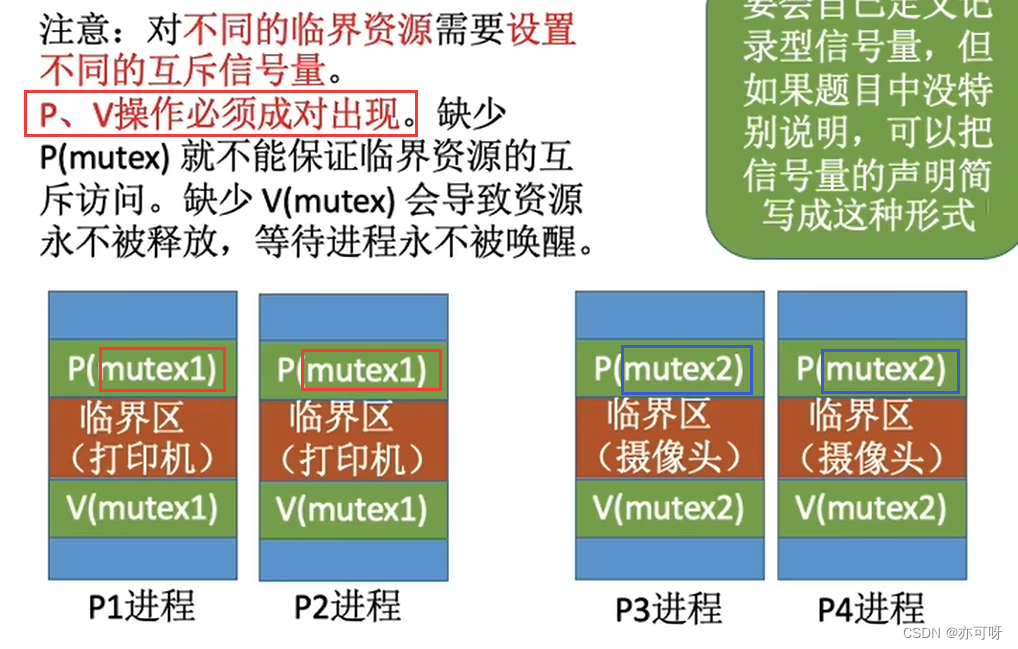
\quad
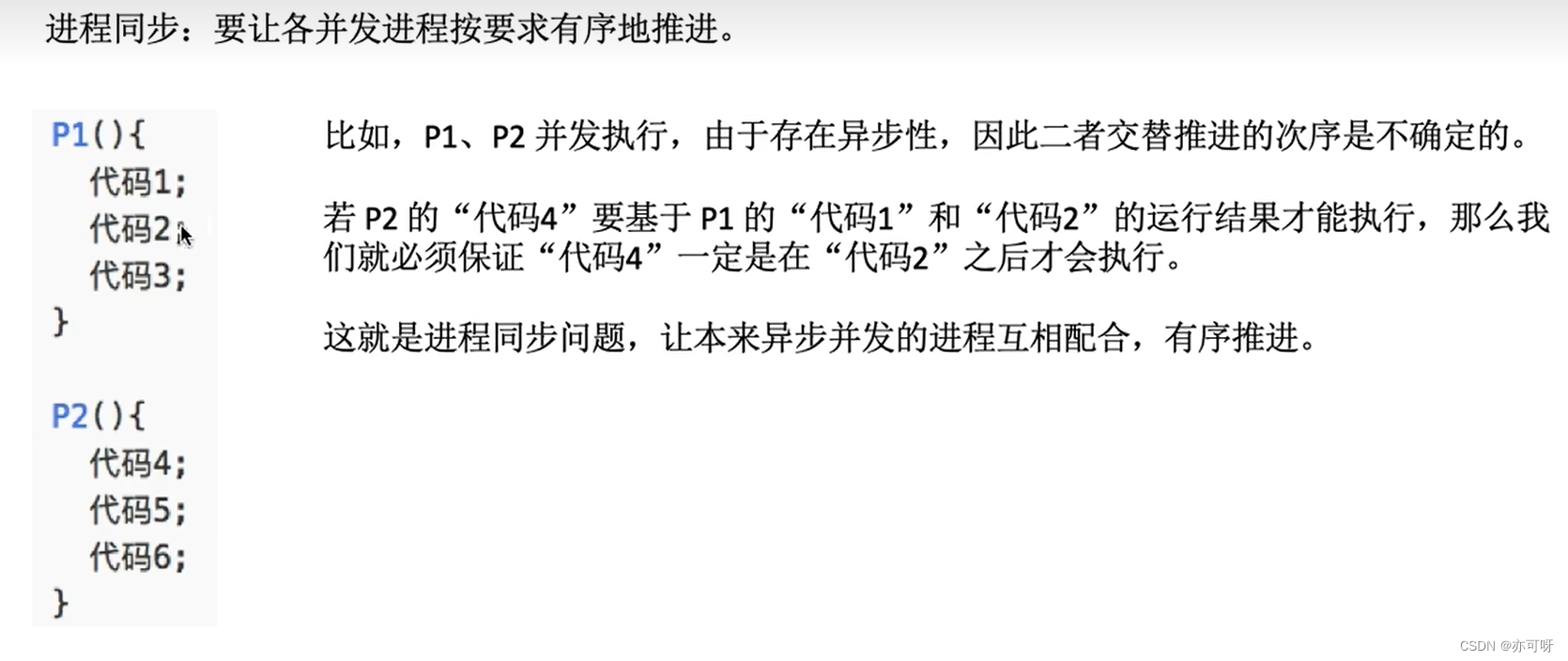
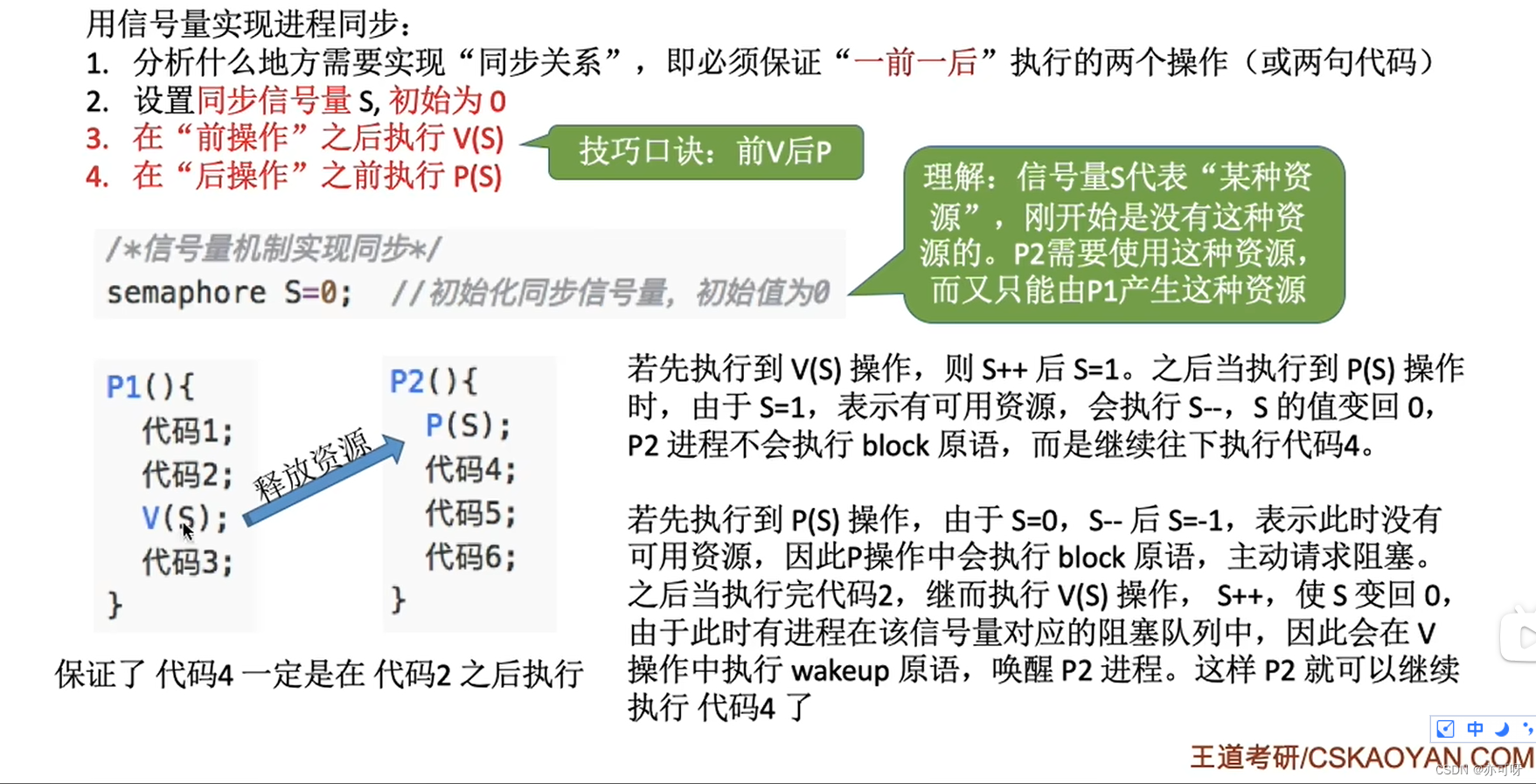
6.4 信号量机制实现进程同步
\quad
并发存在异步性, 不可预知
\quad
\quad
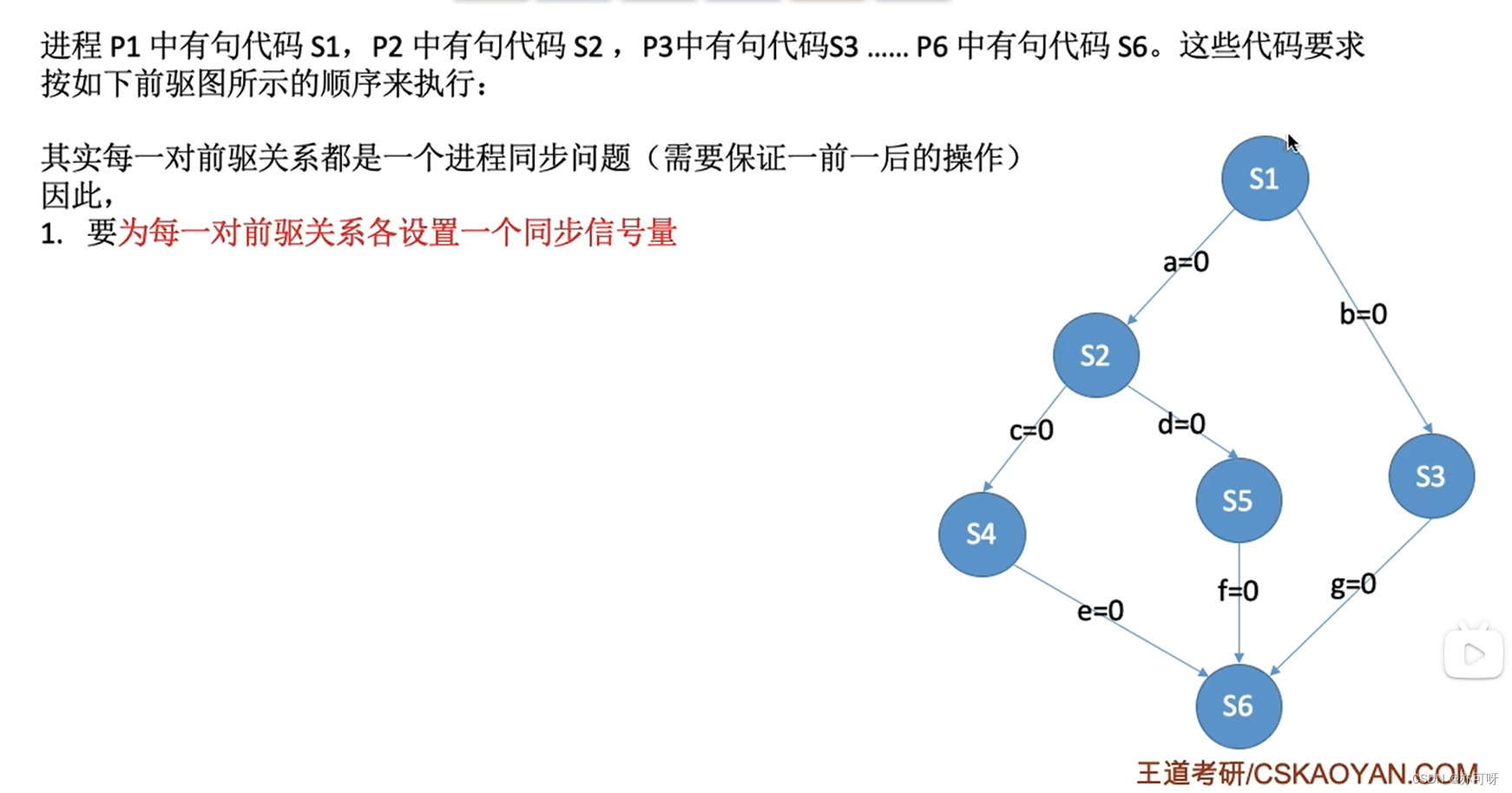
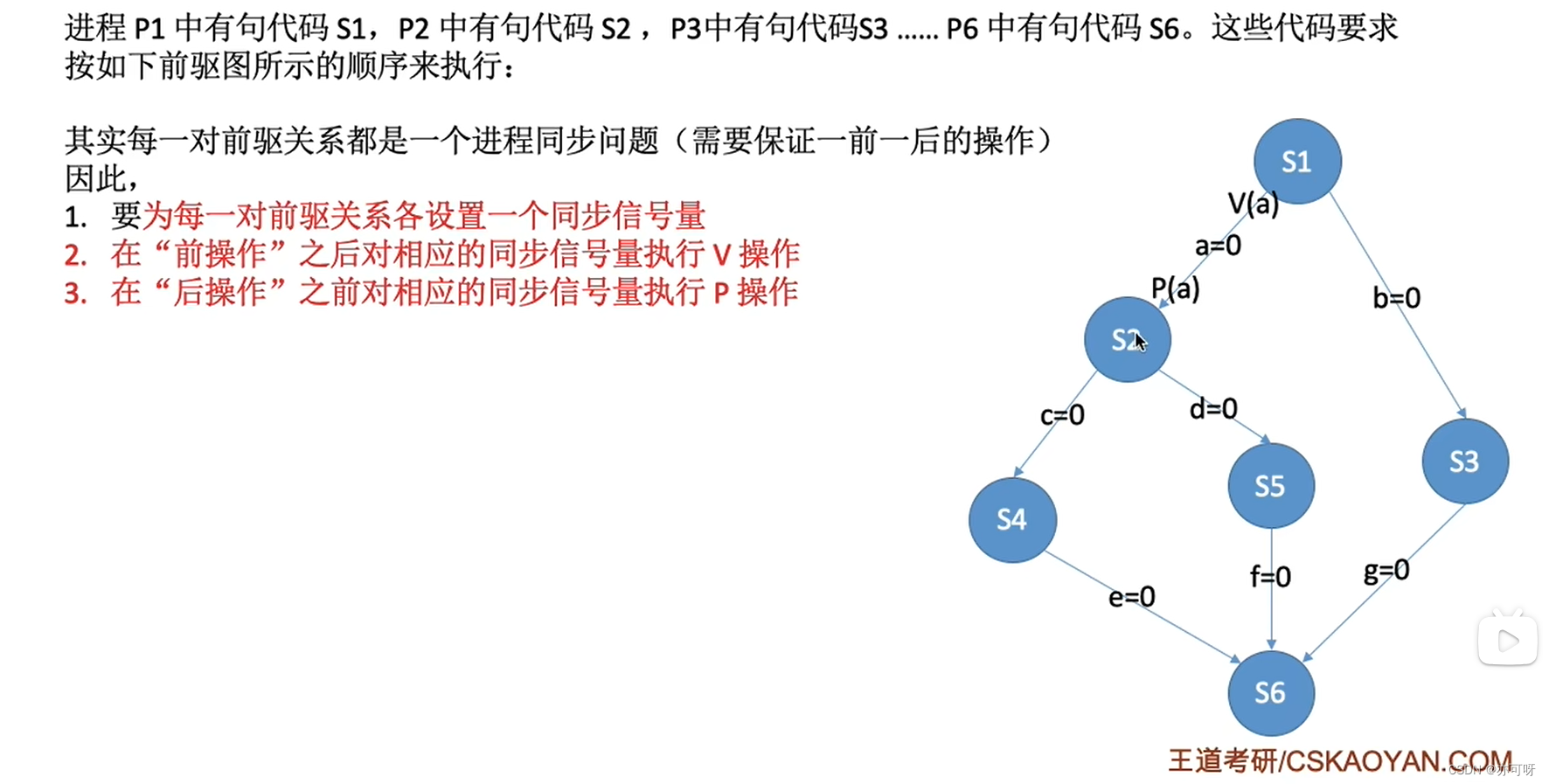
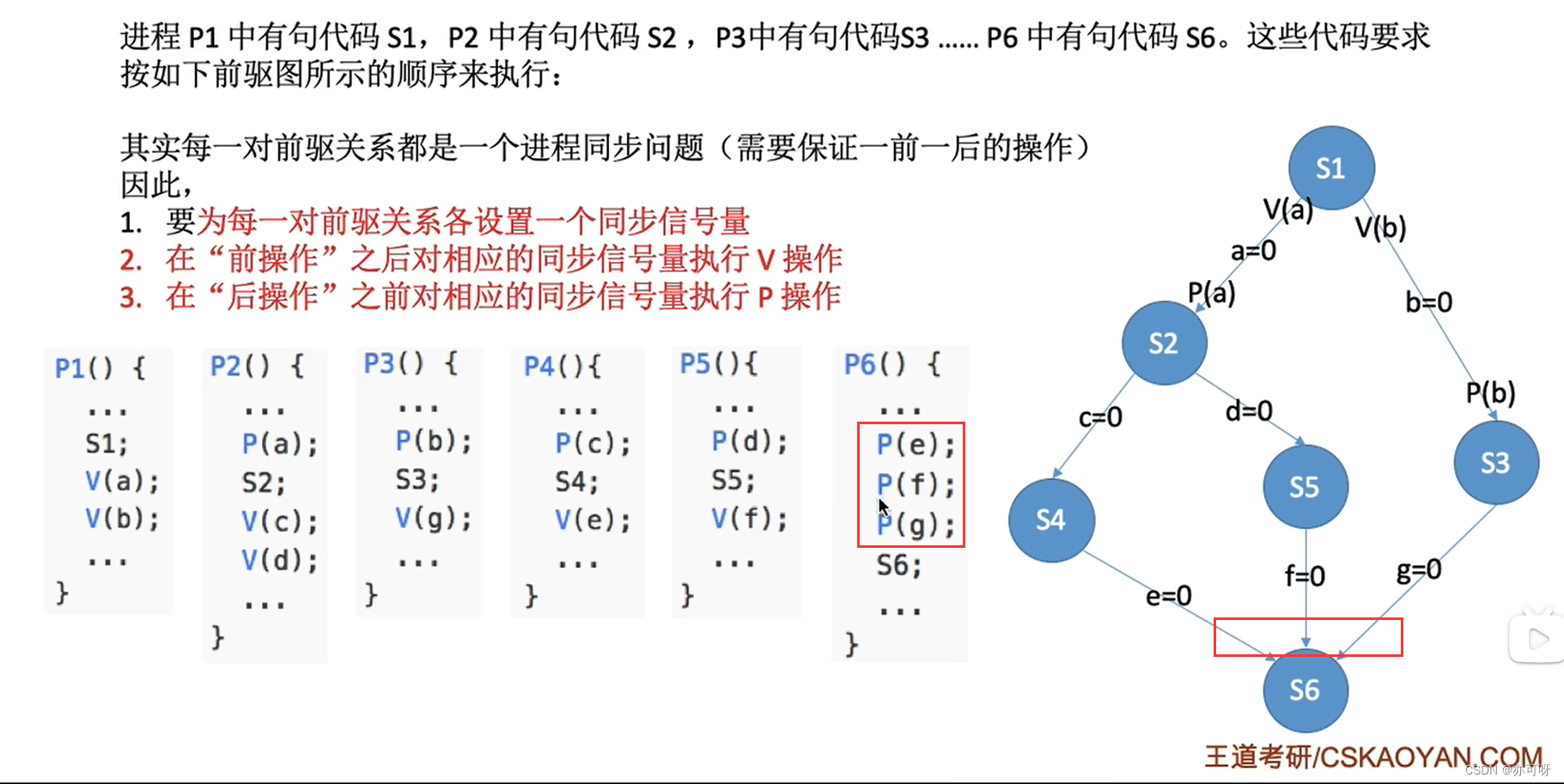
6.5 信号量机制实现进程前驱关系
\quad