提取点云
/// <summary>
/// VoxelGrid滤波下采样
/// </summary>
/// <param name="cloud">需要滤波的点云</param>
/// <param name="lx">三维体素栅格的x</param>
/// <param name="ly">三维体素栅格的y</param>
/// <param name="lz">三维体素栅格的z</param>
/// <returns></returns>
pcl::PCLPointCloud2::Ptr PclTool::voxelGridFilter(pcl::PCLPointCloud2::Ptr cloud, float lx, float ly, float lz)
{
pcl::PCLPointCloud2::Ptr cloud_filtered(new pcl::PCLPointCloud2());
pcl::VoxelGrid<pcl::PCLPointCloud2> sor; // 创建滤波对象
sor.setInputCloud(cloud); // 设置需要过滤的点云给滤波对象
sor.setLeafSize(lx, ly, lz); // 设置滤波时创建的体素体积 单位:m
sor.filter(*cloud_filtered); // 执行滤波处理,存储输出
return cloud_filtered;
}
pcl::PCLPointCloud2::Ptr PclTool::voxelGridFilter(pcl::PCLPointCloud2::Ptr cloud, float lx, float ly, float lz)
{
pcl::PCLPointCloud2::Ptr cloud_filtered(new pcl::PCLPointCloud2());
pcl::VoxelGrid<pcl::PCLPointCloud2> sor; // 创建滤波对象
sor.setInputCloud(cloud); // 设置需要过滤的点云给滤波对象
sor.setLeafSize(lx, ly, lz); // 设置滤波时创建的体素体积 单位:m
sor.filter(*cloud_filtered); // 执行滤波处理,存储输出
return cloud_filtered;
}
// 点云提取
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> PclTool::cloudExtraction(pcl::PCLPointCloud2::Ptr cloud)
{
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> vecCloud;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_f(new pcl::PointCloud<pcl::PointXYZ>);
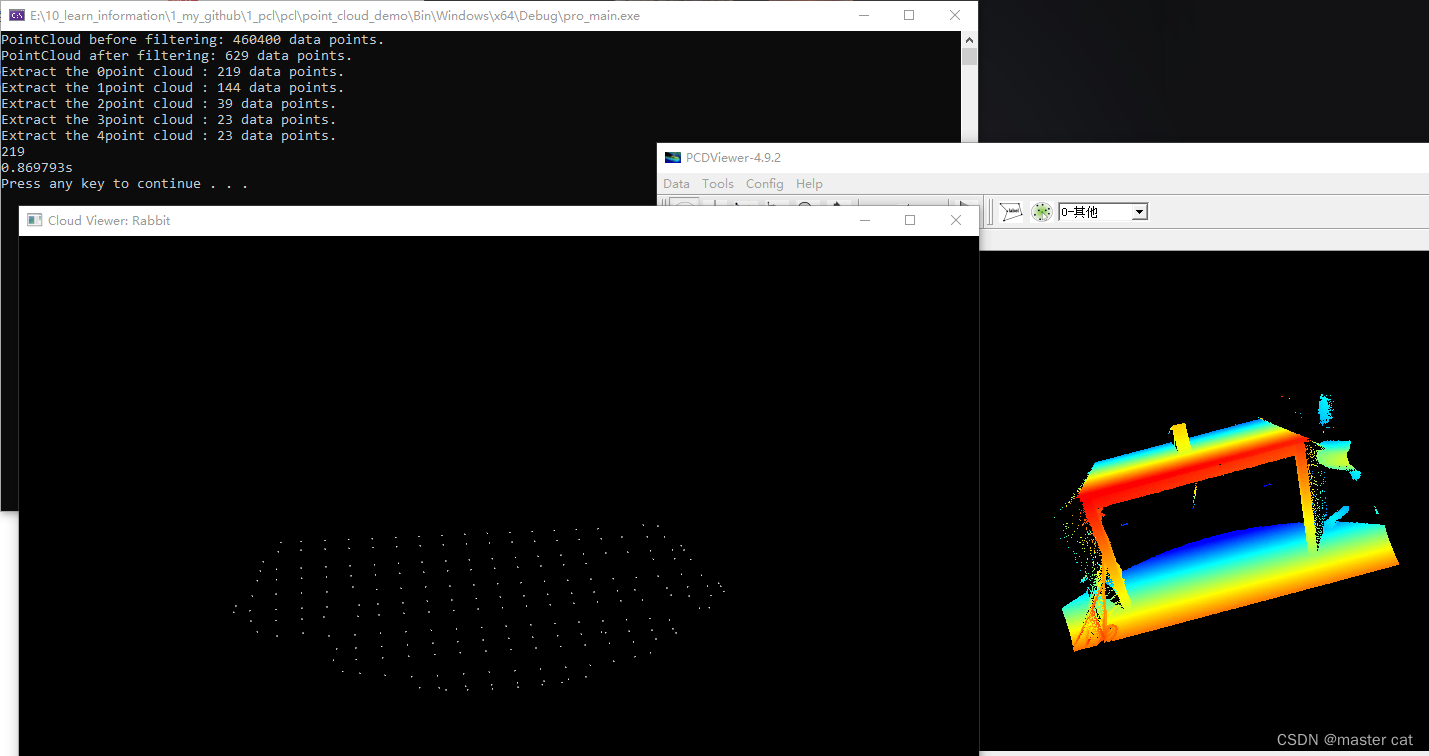
std::cout << "PointCloud before filtering: " << cloud->width * cloud->height << " data points." << std::endl;
// 先对点云做VoxelGrid滤波器对数据进行下采样,在这里进行下才样是为了加速处理过程
pcl::PCLPointCloud2::Ptr cloud_filtered_blob = voxelGridFilter(cloud, 0.1, 0.1, 0.1);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
// 转换为模板点云
pcl::fromPCLPointCloud2(*cloud_filtered_blob, *cloud_filtered);
std::cout << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height << " data points." << std::endl;
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
pcl::PointIndices::Ptr inliers(new pcl::PointIndices());
pcl::SACSegmentation<pcl::PointXYZ> seg; // 创建分割对象
seg.setOptimizeCoefficients(true); // 设置对估计模型参数进行优化处理
seg.setModelType(pcl::SACMODEL_PLANE); // 设置分割模型类别
seg.setMethodType(pcl::SAC_RANSAC); // 设置用哪个随机参数估计方法
seg.setMaxIterations(1000); // 设置最大迭代次数
seg.setDistanceThreshold(0.01); // 判断是否为模型内点的距离阀值
// 设置ExtractIndices的实际参数
pcl::ExtractIndices<pcl::PointXYZ> extract; // 创建点云提取对象
int i = 0;
int nr_points = (int)cloud_filtered->points.size(); // 点云总数
for (int i = 0; cloud_filtered->points.size() > 0.3 * nr_points; i++)
{
// 为了处理点云包含的多个模型,在一个循环中执行该过程并在每次模型被提取后,保存剩余的点进行迭代
seg.setInputCloud(cloud_filtered);
seg.segment(*inliers, *coefficients);
if (inliers->indices.size() == 0)
{
// 无法估计给定数据集的平面模型。
std::cout << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
//提取入口
pcl::PointCloud<pcl::PointXYZ>::Ptr temp_cloud(new pcl::PointCloud<pcl::PointXYZ>);
extract.setInputCloud(cloud_filtered);
extract.setIndices(inliers);
extract.setNegative(false);
extract.filter(*temp_cloud);
vecCloud.push_back(temp_cloud);
std::cout << "Extract the " << i << "point cloud : " << temp_cloud->width * temp_cloud->height << " data points." << std::endl;
//创建筛选对象
extract.setNegative(true);
extract.filter(*cloud_f);
cloud_filtered.swap(cloud_f);
}
return vecCloud;
}