UART总线:
异步全双工串行总线。用于芯片与外设之间的通信
UART通信协议:
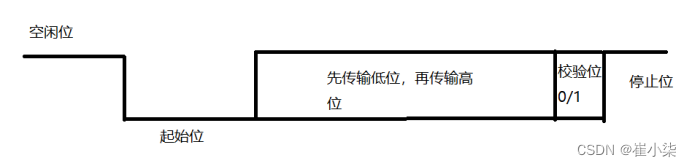
空闲状态处于高电平
起始位:串口通信的起始标志
数据位:传输数据时先从低位开始传输,再传输高位
奇偶校验位: 奇校验:数据位和校验位1的个数为奇数
偶校验:数据位和校验位1的个数为偶数
停止位:(1)发送完数据的标志(2)校验时钟
因为串口采用异步通信方式,两个设备之间有自己独立的时钟源,虽然设置两个时钟源保持一致,但还是会有误差,并且随着时间的拉长,误差会越来越大。
串口配置:115200波特率 8位数据为 1位奇偶校验位 1位停止位
框图:
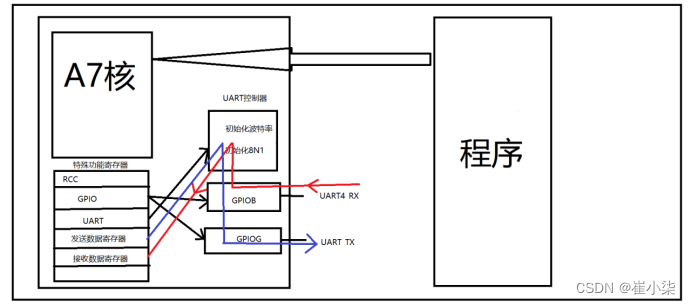
RCC:使能GPIOB,GPIOG,UART4
GPIO:设置I\O引脚为复用模式,并设置复用功能
UART:初始化串口
实验流程:
RCC:使能GPIO
GPIO:设置GPIO_MODER为复用模式
设置引脚复用功能为UART4_RX和UART4_TX
UART:
设置8位数据宽度
设置无奇偶校验
设置1位停止位
设置16倍采样率
设置发送寄存器使能
设置接收寄存器使能
设置波特率为115200
设置分屏器不分频
设置UART使能
利用发送寄存器发送数据
利用接收寄存器接收数据
状态位寄存器查看发送接收寄存器状态
代码:
uart4.c
#include "../include/uart4.h"
#include "../common/include/stm32mp1xx_gpio.h"
#include "../common/include/stm32mp1xx_uart.h"
#include "../common/include/stm32mp1xx_rcc.h"
void hal_uart4_init(){
RCC->MP_AHB4ENSETR |= (0x1 << 1);
RCC->MP_AHB4ENSETR |= (0x1 << 6);
// 使能UART控制器的时钟
RCC->MP_APB1ENSETR |= (0x1 << 16);
/*******GPIO章节初始化*******/
// 设置PG11为复用模式
GPIOG->MODER &= (~(0x3 << 22));
GPIOG->MODER |= (0x2 << 22);
//设置PB2为复用模式
GPIOB->MODER &= (~(0x3 << 4));
GPIOB->MODER |= (0x2 << 4);
//设置PG11为UART4_TX复用功能
GPIOG->AFRH &= (~(0xf << 12));
GPIOG->AFRH |= (0x6 << 12);
//设置PB2为UART4_RX复用功能
GPIOB->AFRL &= (~(0xf << 8));
GPIOB->AFRL |= (0x8 << 8);
/*******UART章节初始化*******/
//设置UART4传输数据宽度为8位
USART4->CR1 &= (~(0x1 << 28));
USART4->CR1 &= (~(0x1 << 12));
//设置UART4串口16倍采样率
USART4->CR1 &= (~(0x1 << 15));
//设置UART4串口无奇偶校验位
USART4->CR1 &= (~(0x1 << 10));
//设置UART4串口发送寄存器和接收寄存器使能
USART4->CR1 |= (0x3 << 2);
//设置UART4串口1位停止位
USART4->CR2 &= (~(0x3 << 12));
//设置UART4串口不分频
USART4->PRESC &= ~0xf;
//设置UART4串口波特率为115200
USART4->BRR &= ~0xffff;
USART4->BRR |= 0x22b;
//设置UART4串口使能
USART4->CR1 |= 0x1;
}
void put_char(const char c){
while(!(USART4->ISR&(0x1<<7))); //7(0),寄存器满
//7(1) 寄存器为空,可发送
USART4->TDR&=~(0xff);
USART4->TDR=c;
if(c=='\n')
put_char('\r');
while(!(USART4->ISR&(0x1<<6))); //数据发送完成
}
char get_char(){
char c;
while(!(USART4->ISR&(0x1<<5)));
for (int i=0;i<9;i++){
if(USART4->RDR & (0x1<<i)){
c|=(0x1 <<i);
}else{
c&=(~(0x1<<i));
}
}
return c;
}
void put_string(char* string){
char* p=string;
while(*p!='\0'){
while(!(USART4->ISR&(0x1<<7))); //7(0),寄存器满
put_char(*p);
p++;
}
}
char buf[64]="";
char* get_string(){
char* p=buf;
char c;
while(c!='\r'){
c=get_char();
printf("%c",c);
*p=c;
p++;
}
*p='\0';
put_char('\n');
return buf;
}main.c
#include "./include/uart4.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{
int i,j;
for(i = 0; i < ms;i++)
for (j = 0; j < 1800; j++);
}
void init()
{
hal_uart4_init();
}
int main()
{
init();
while(1)
{
// put_char(get_char()+1);
put_string(get_string());
}
return 0;
}