Fixture定位工具
需求:
测量工件的尺寸
使用Caliper(卡尺)工具
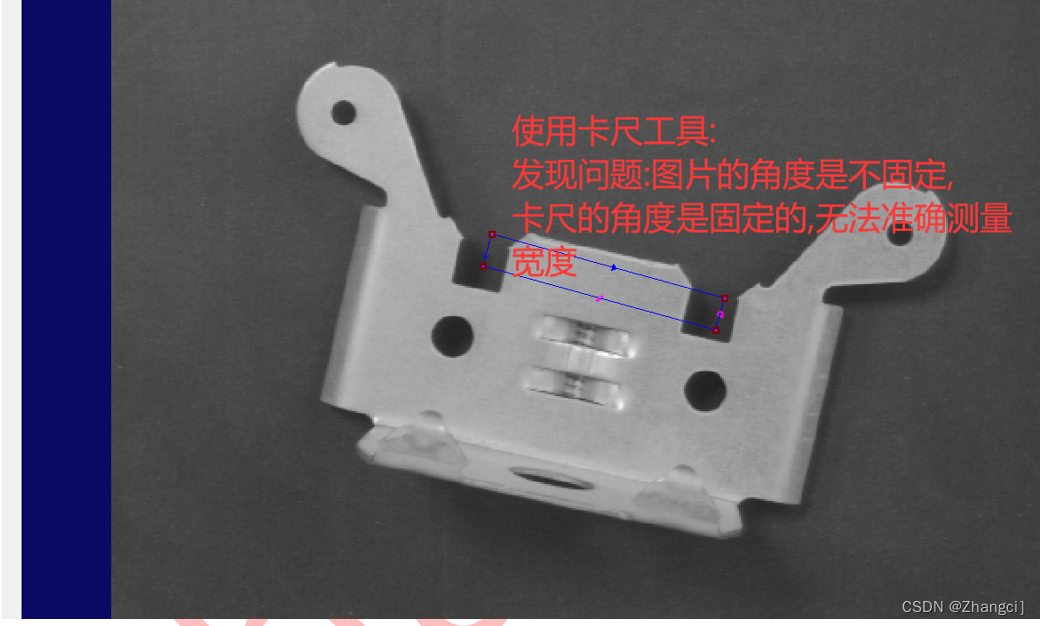
这个时候需要借助Fixture工具
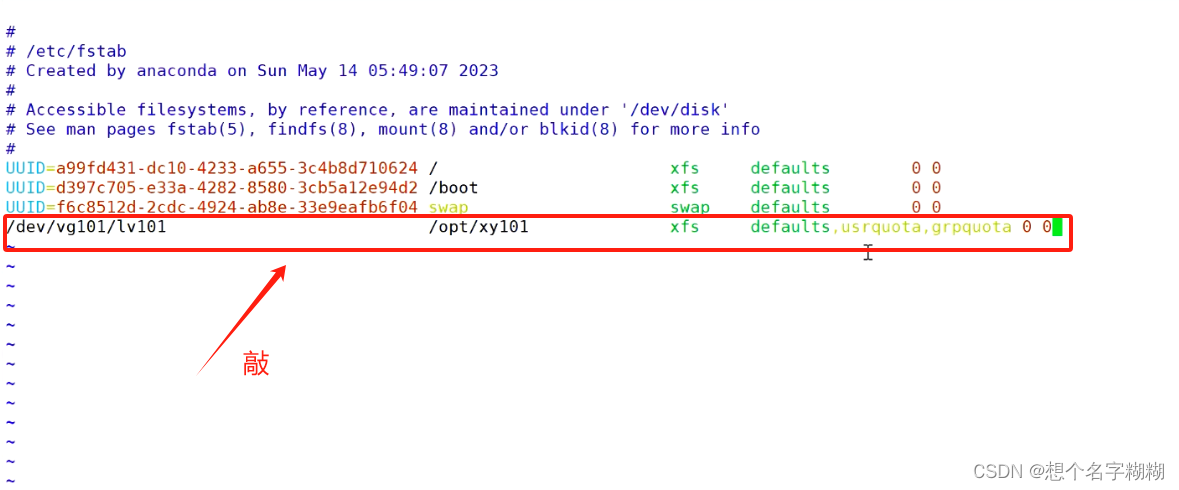
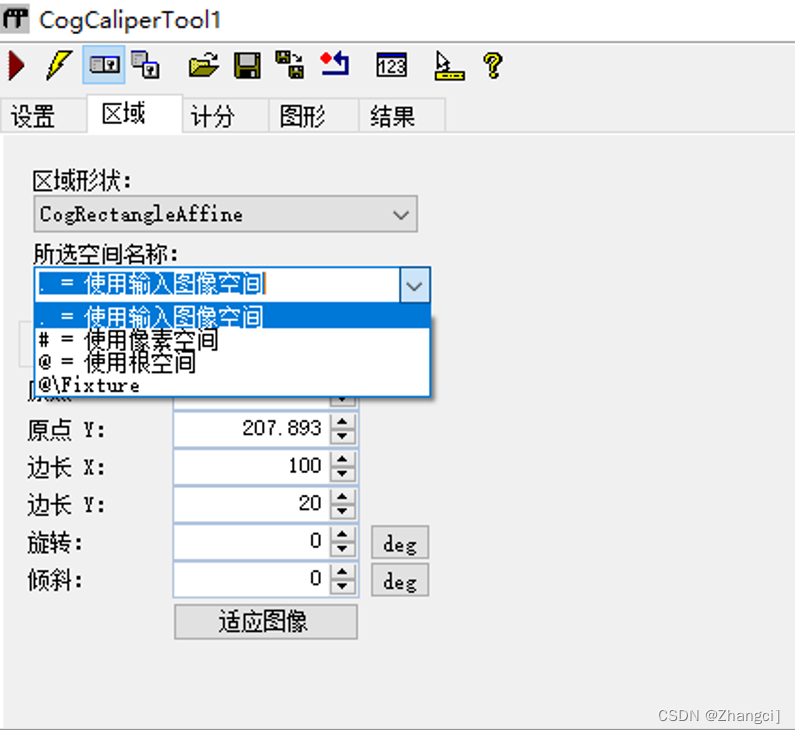
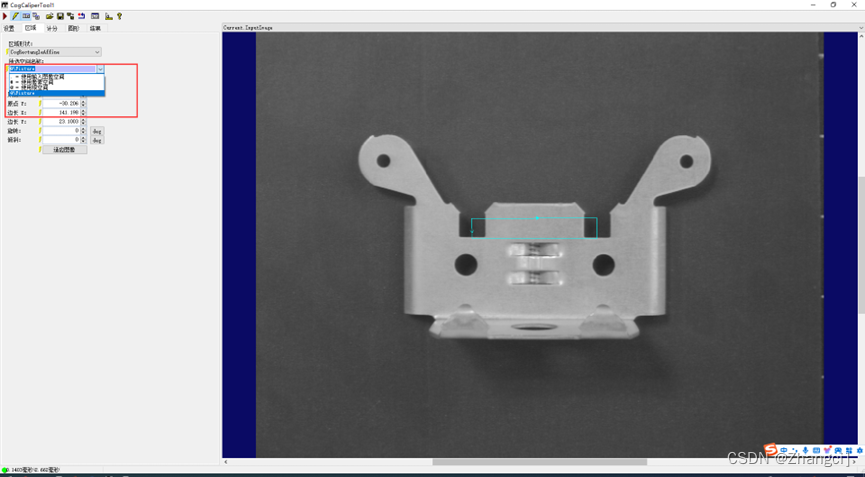
VisionPro中的图像空间
“·” 图像的当前空间,即CogImage中的“SelectedSpaceName”表示的名字空间
“#” 像素空间,即坐标原点为图片左上角的坐标空间,该坐标空间的坐标值仅为整数。
“@” 根空间,默认的坐标空间都是基于根空间。该空间坐标原点为图片左上角,该坐标空间的坐标值类型为浮点型。
“*” 控件的像素空间,主要是显示控件上面使用。
自定义空间 fixture
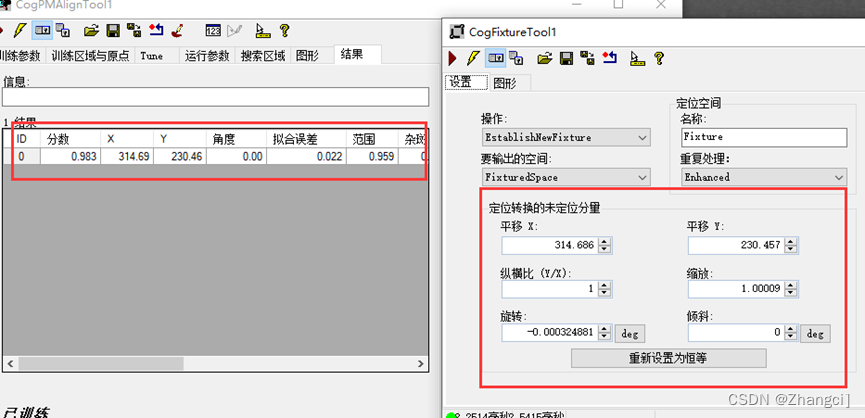
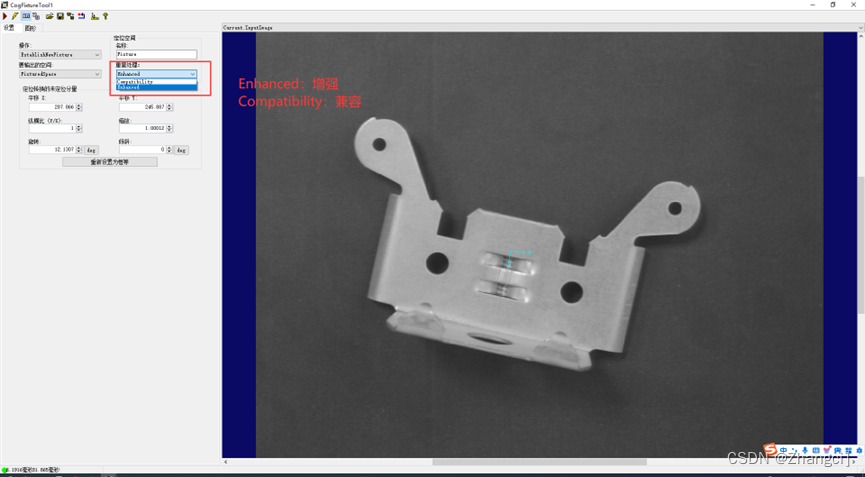
CogFixtureTool
是一种建立定位坐标系的工具,也是最长用的,在使用此工具建立定位坐标系之前,需要提前获得一个2D转换关系,2D转换关系的通过其他工具获取,其主要任务:
- 一个往坐标空间树种添加一个定位坐标系,需设定定位坐标系的名称;
- 建立一个定位后的输出图像提供其他工具调用,输出图像的像素和输入图像完全相同,但坐标空间可以选择为定位空间或者非定位空间。
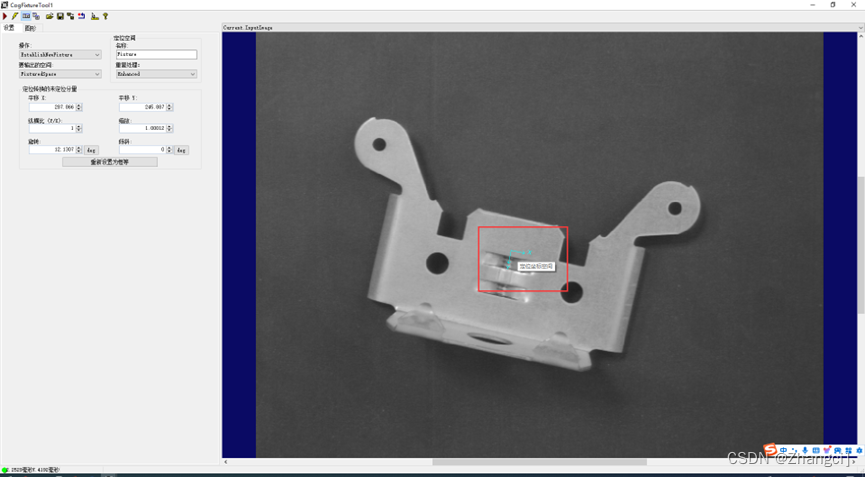
相当于给图像重新定义了一个坐标系,后续需要执行的找边找圆操作会跟随目标点位的旋转平移变化而变化
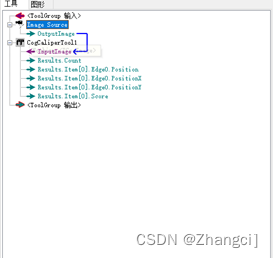
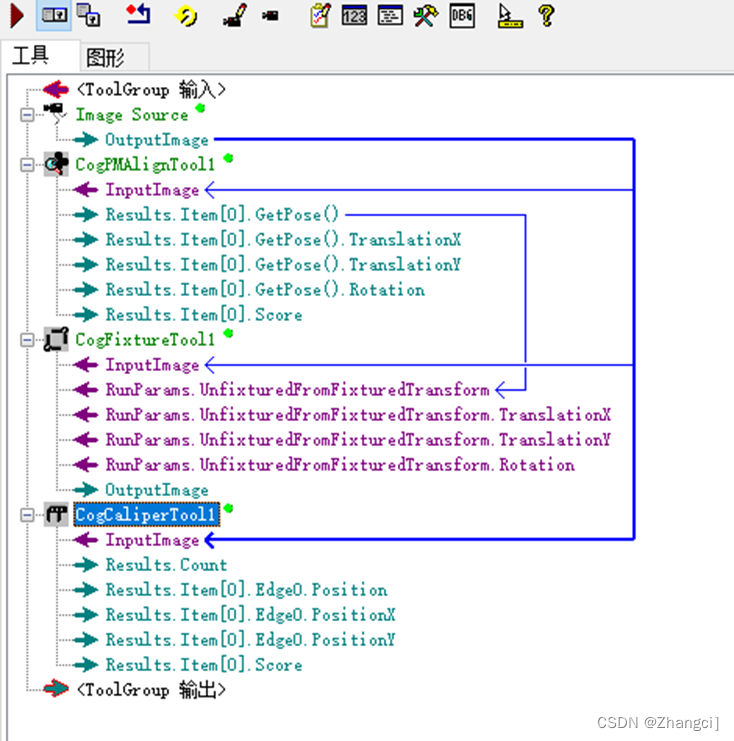
添加Fixture工具

设置图像源
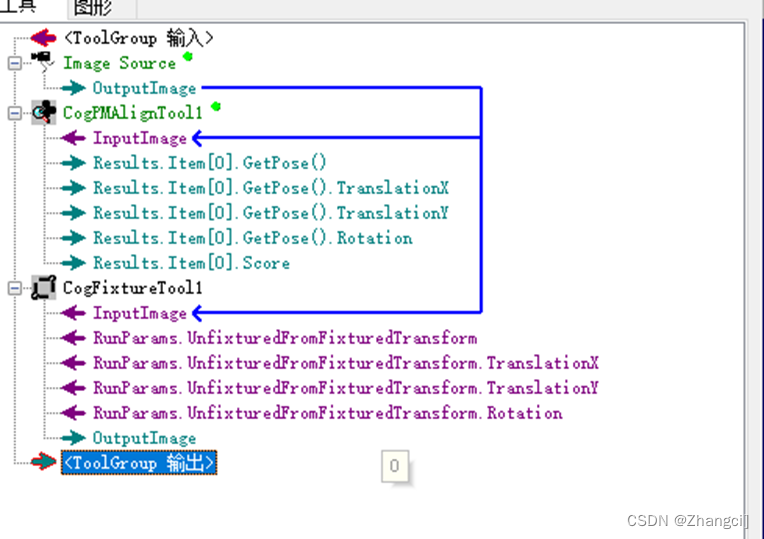
结合PMA工具
默认是没有任何信息的

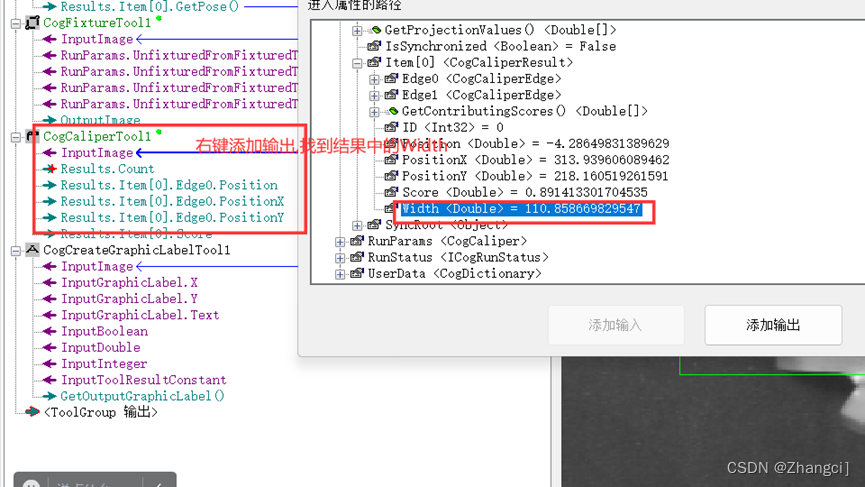
建立工具连接
将PMA的运行结果传输到Fixture里面
蓝色为每个工具的输出参数,紫色为工具的输入
参数,选择CogPMAlignTool工具的查找结果GetPose()参数
(该参数包含了目标点位的X、Y和角度信息等)
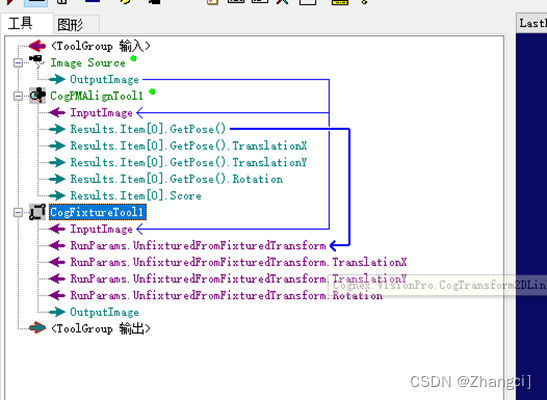
与PMA中的结果相对应

注意:

定位坐标空间
坐标系会随着工件的旋转而旋转,这个坐标系就称之为Fixture坐标系
参数介绍:



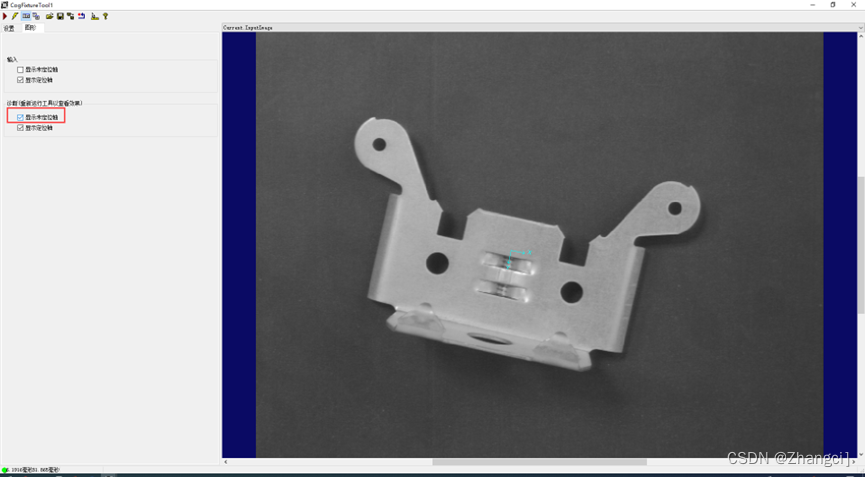
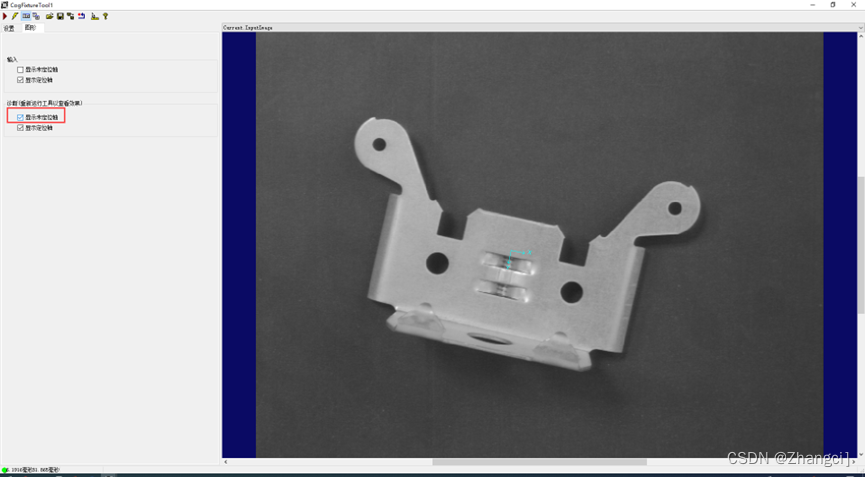
在图形选项卡勾选
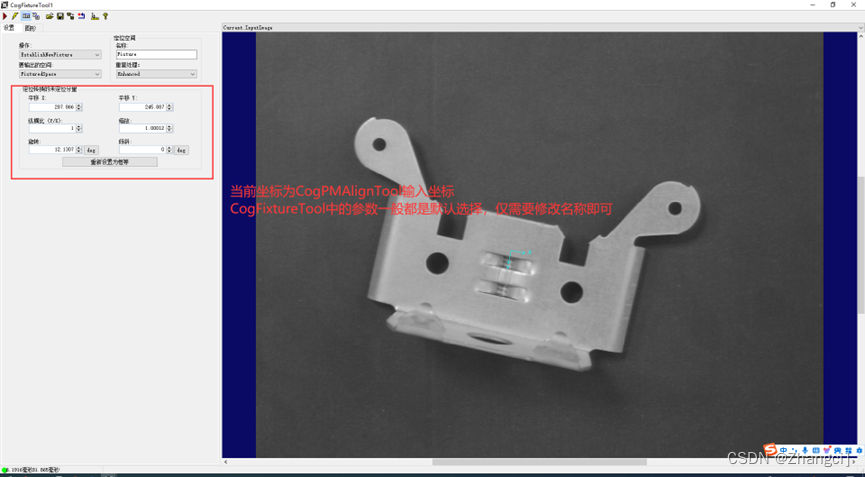
CogFixtureTool中的参数一般都是默认选择,仅需要修改名称即可
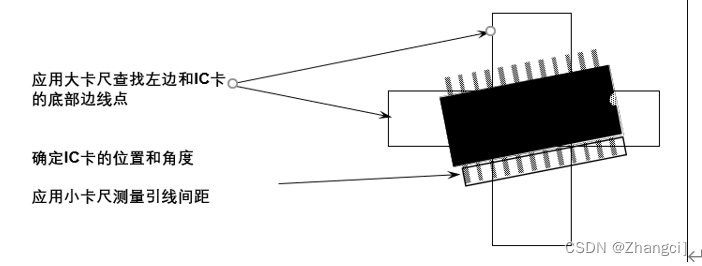
Caliper(卡尺)工具
游标卡尺工具介绍
• 辨别对象中的边缘或者边缘对
• 报告边线对子中的边线位置和边线之间的距离
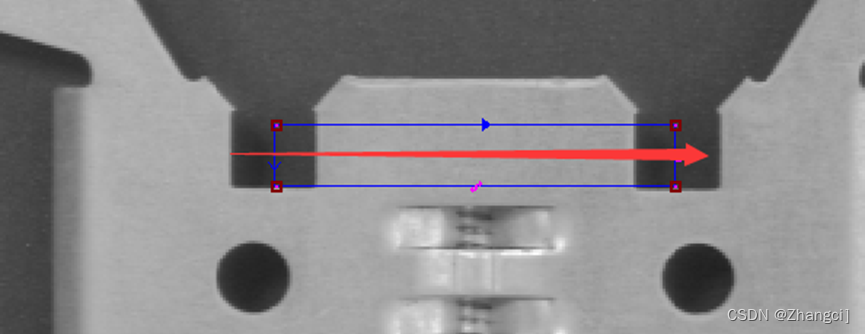
需求:
• 测量该工件的某个位置的宽度
添加工具并链接图像
步骤
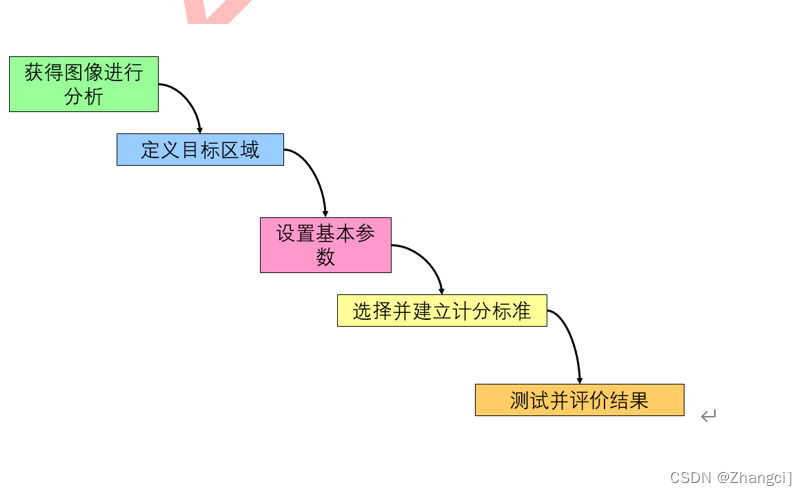
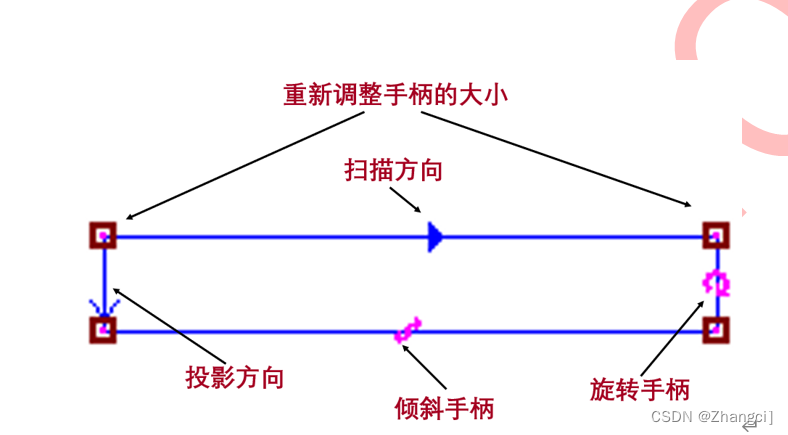
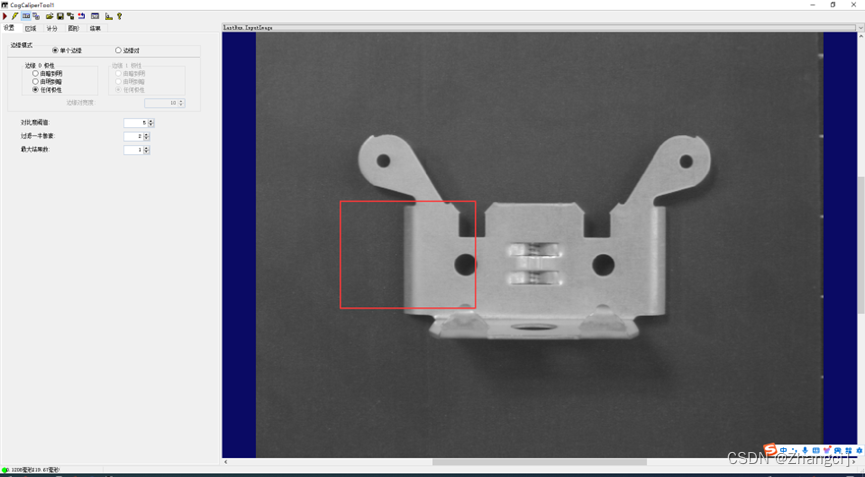
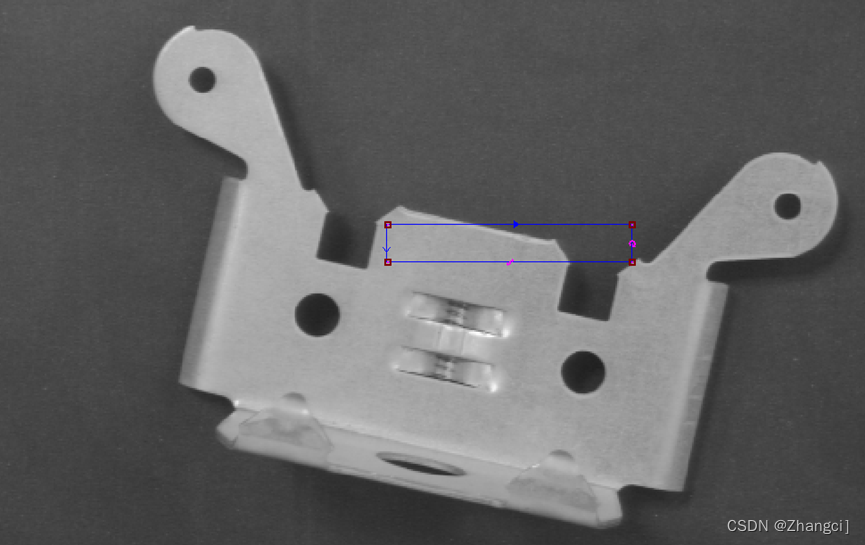
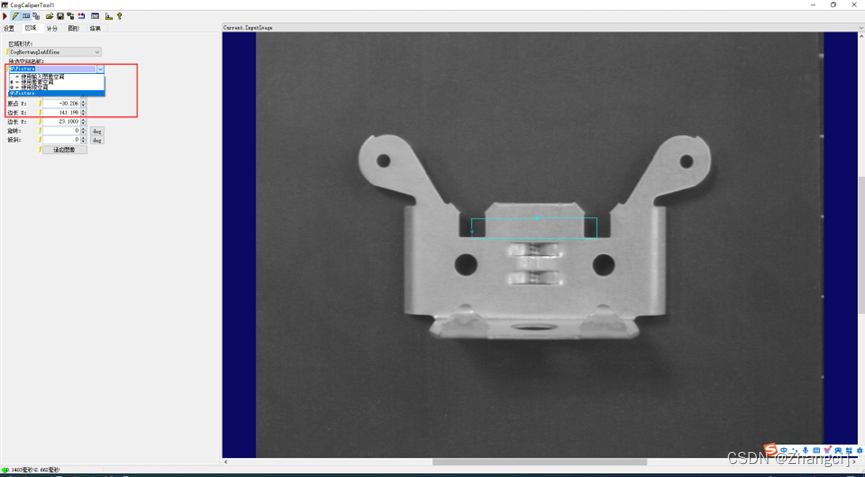
定义目标区域
• 游标卡尺区域指图像中探测到边线的区域
• 在图形上由 输入图像中的蓝色方框表示
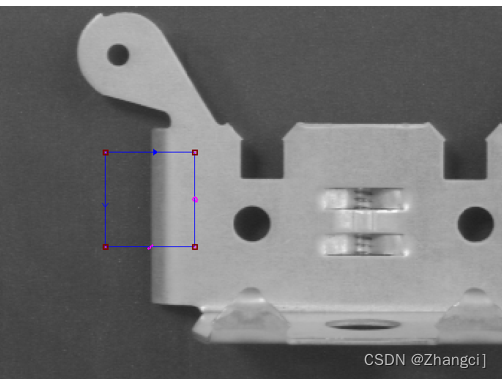
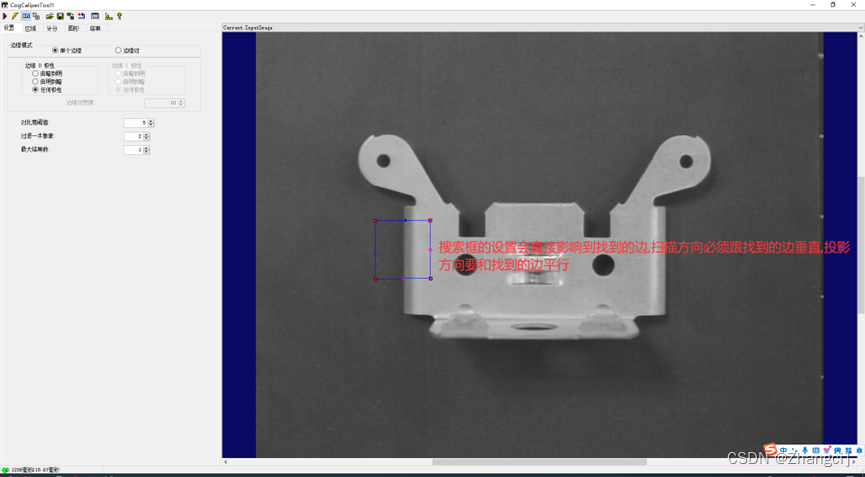
区域设置
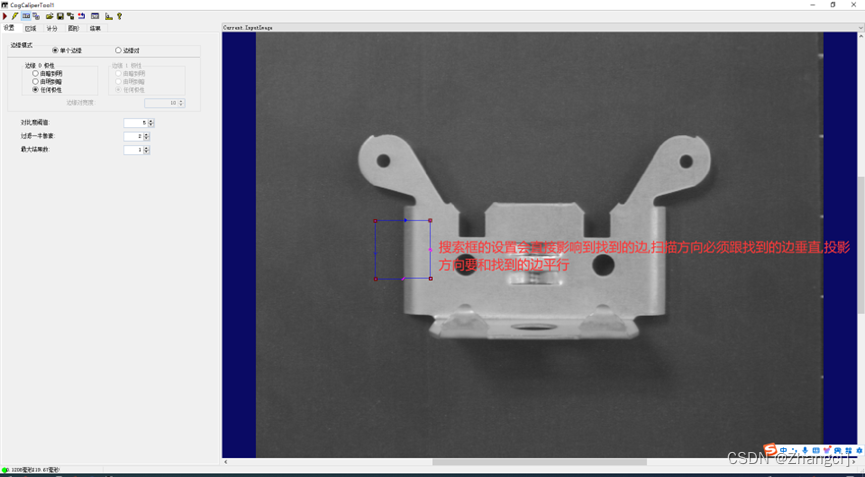
• 区域标准:
• 包含目标边线
• 边线必须与投影方向平行
• 可能必须旋转
• 在可能时,不包括目标边线以外的特征
• 可能必须倾斜
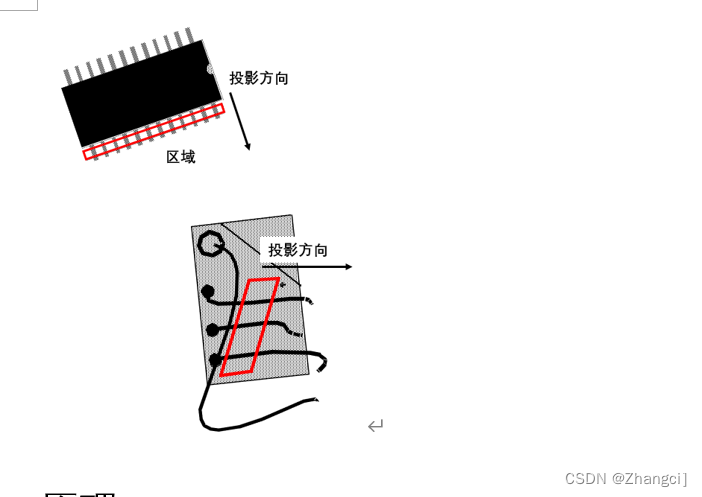
原理:

设置参数
• 参数的设置要求了解工作是如何执行的
运行期间
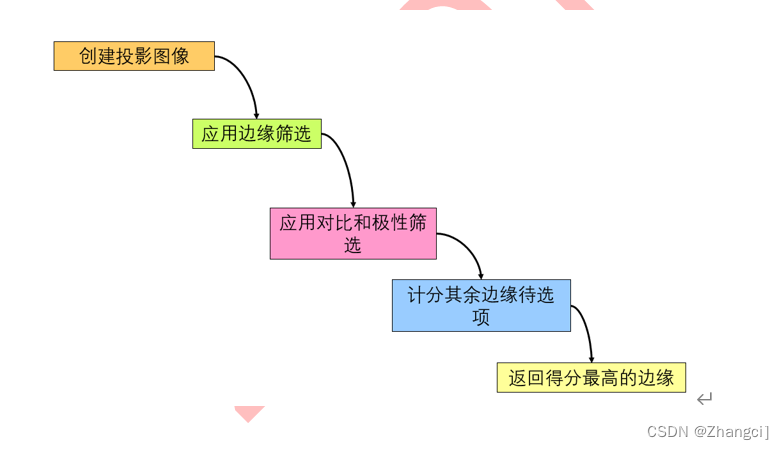
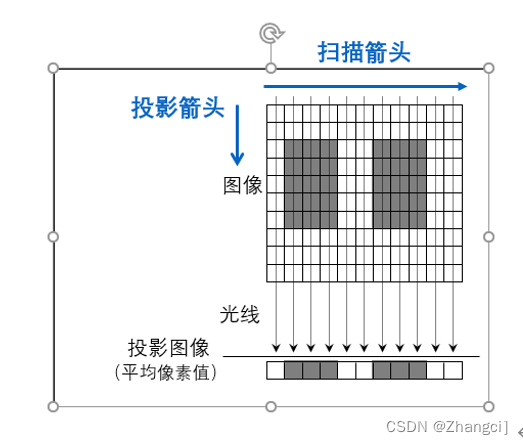
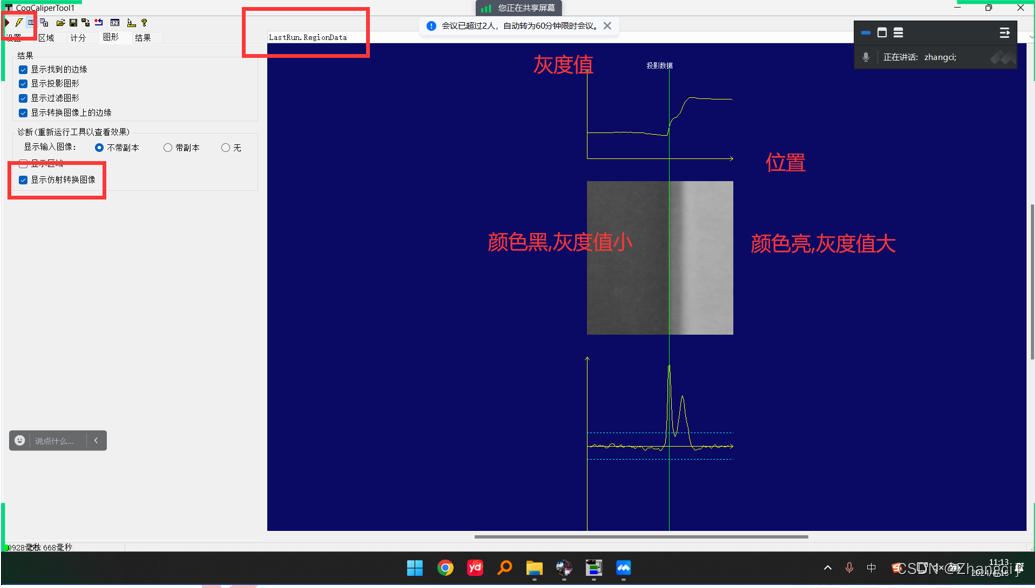
投影
• 投影 将二维图像减少到一维图像
• 减少处理时间和存储
• 维持并且在一些情况下增强边线信息
• 沿着规定方向中的平行光线添加像素灰度值
边线筛选
• 边线筛选的目的是从输入图像中消除噪音
• 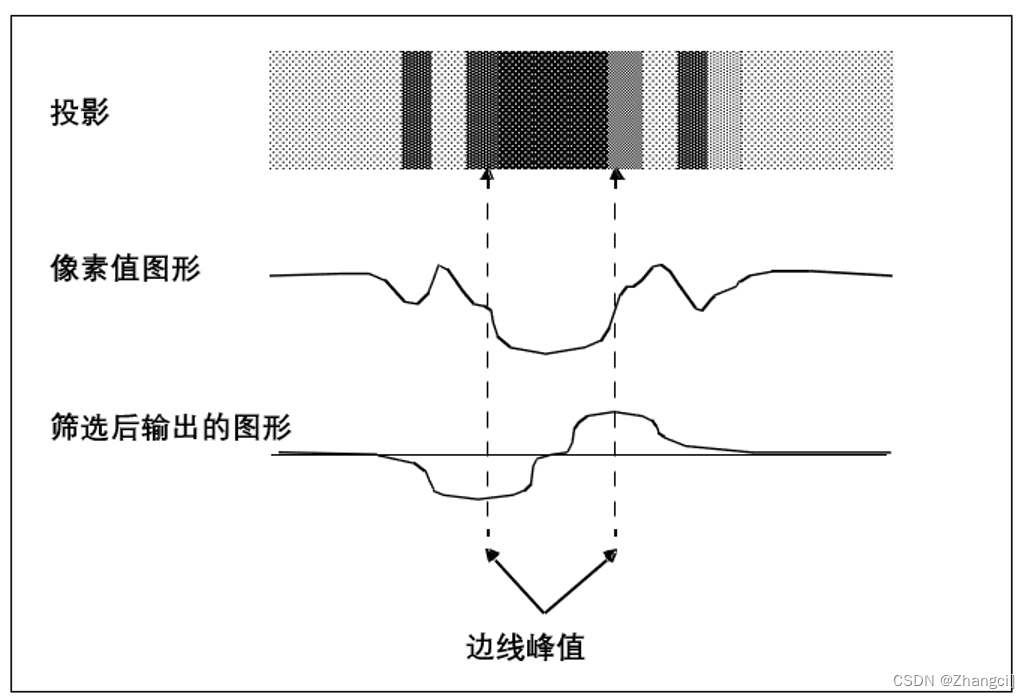
找边原理
游标卡尺工具通过使用一个筛选算子盘旋一维投影图像来执行筛选
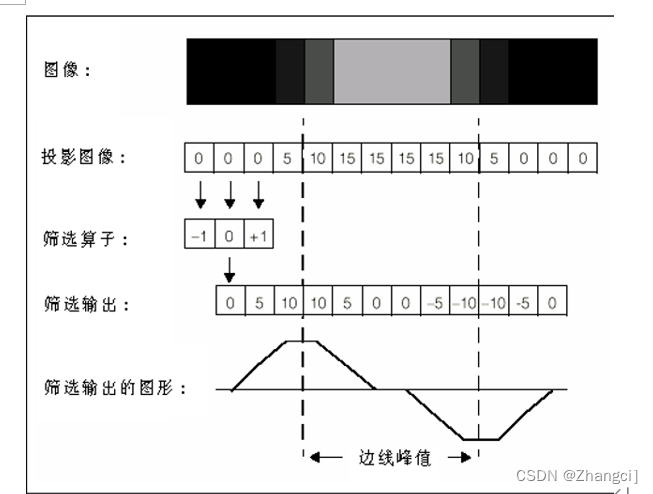
Projection Image 一维投影图像
Filter operator 灰度值的滤波算子
Filtered output 过滤后的输出参数
第一个位置 -10 + 00 + 10 = 0
第二个位置 -10 + 00 + 15 = 5
第三个位置 -10 + 05 + 110 = 10
第四个位置 -15 + 010 + 115 = 10
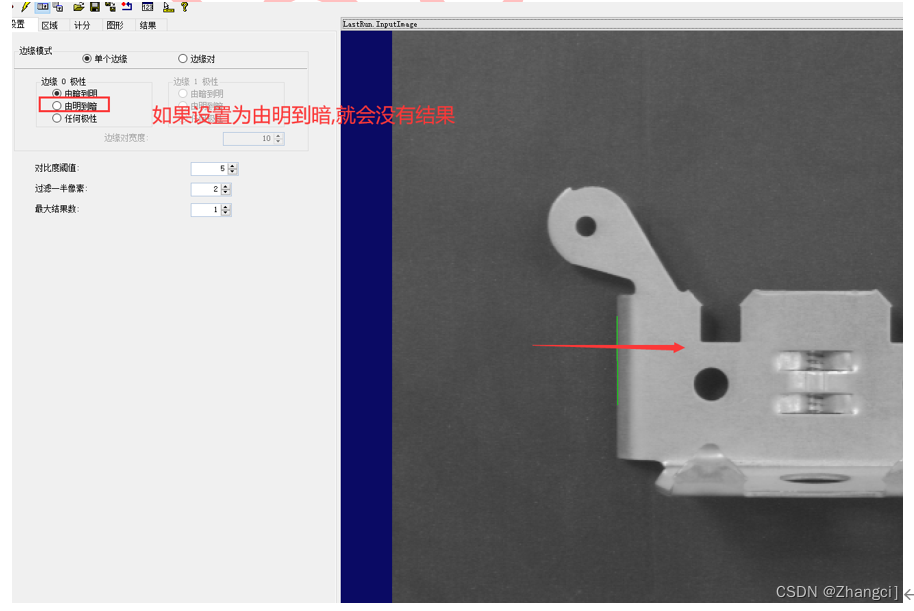
参数介绍:
极性
对比度阈值

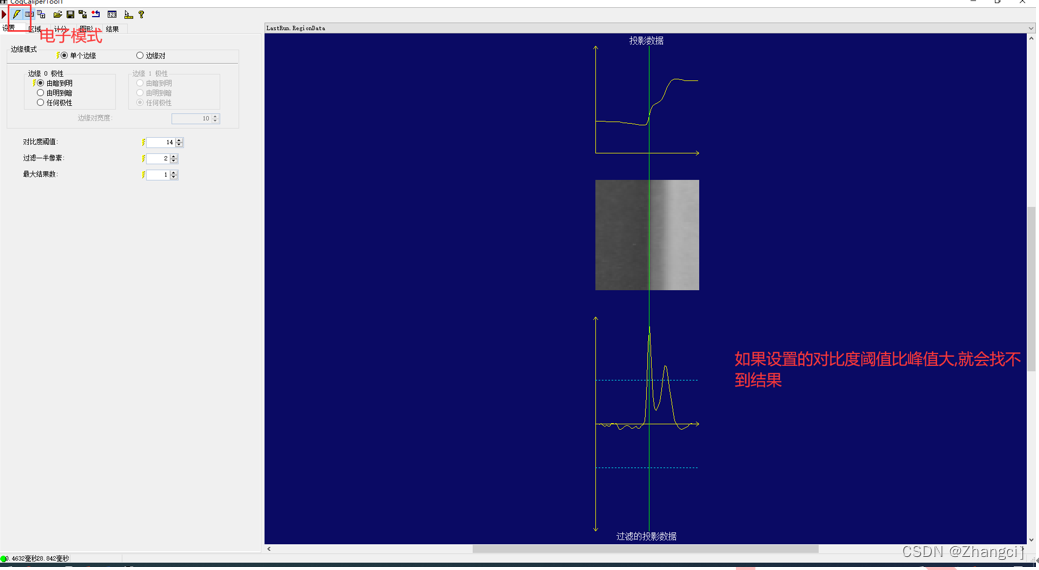
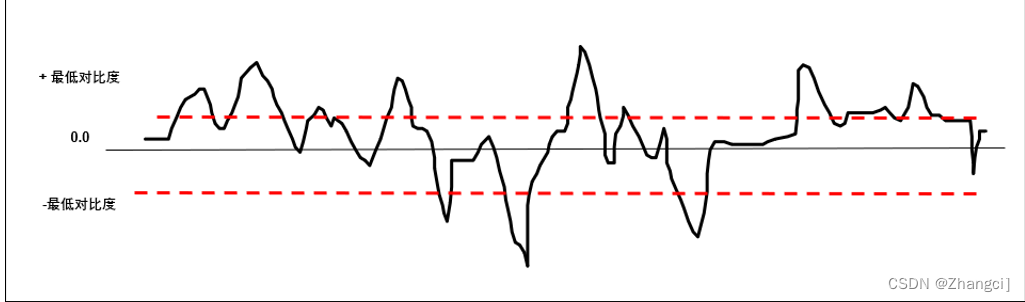
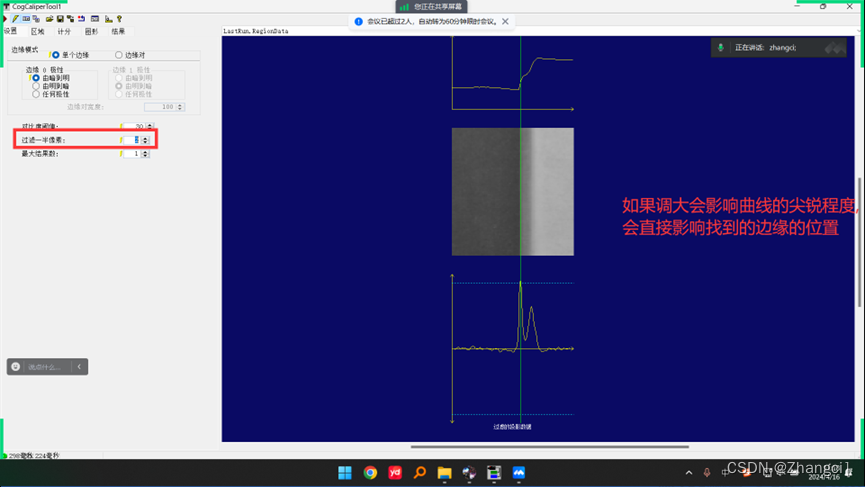
过滤一半像素
最大结果数
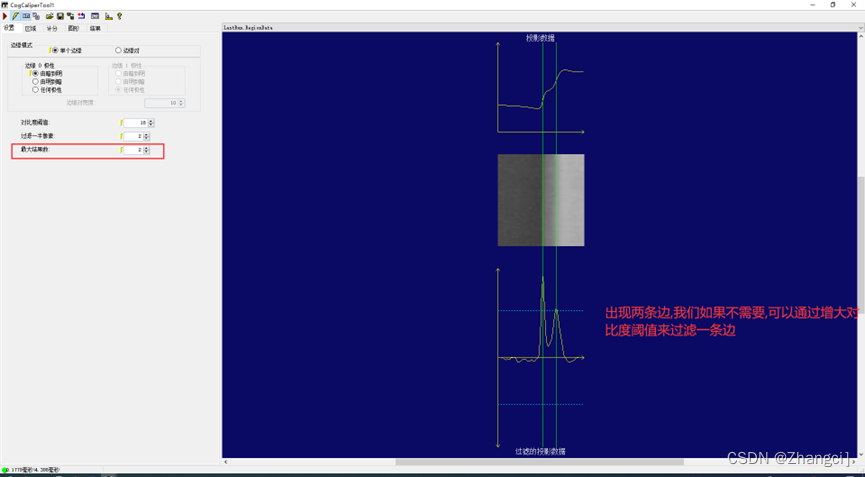
也可以查找多个边缘,通过边缘检测个数
边缘对
出现问题:
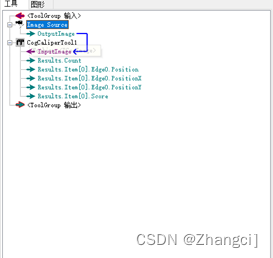
结合命名空间工具使用
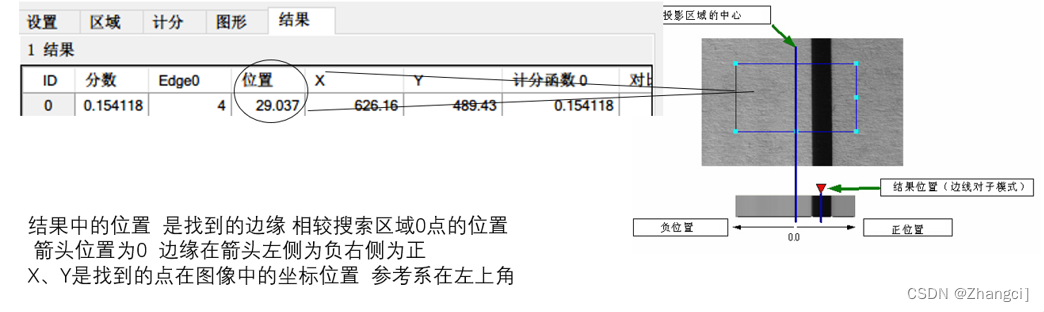
结果
结果按照得分从高到低的顺序显示在结果表格中

位置
沿相对于输入区域中心的搜索方向的一维测量
计分
默认状态下,单个边线只根据它们跨边线的对比度进行计分,而边线对子根据所测边线之间的距离与预期距离匹配程度来计分。
有时,您需要修改如何给边线计分以便可靠地返回您实际想要查找的那些。这时就需要添加其他的计分函数。
分数: 按照计分的分数曲线来得到计分结果
X0=255 时 得到的分数是1分
分数计算应为 对比度/X0 73.4551/255 =0.28
修改X0参数 为75 得分接近与1
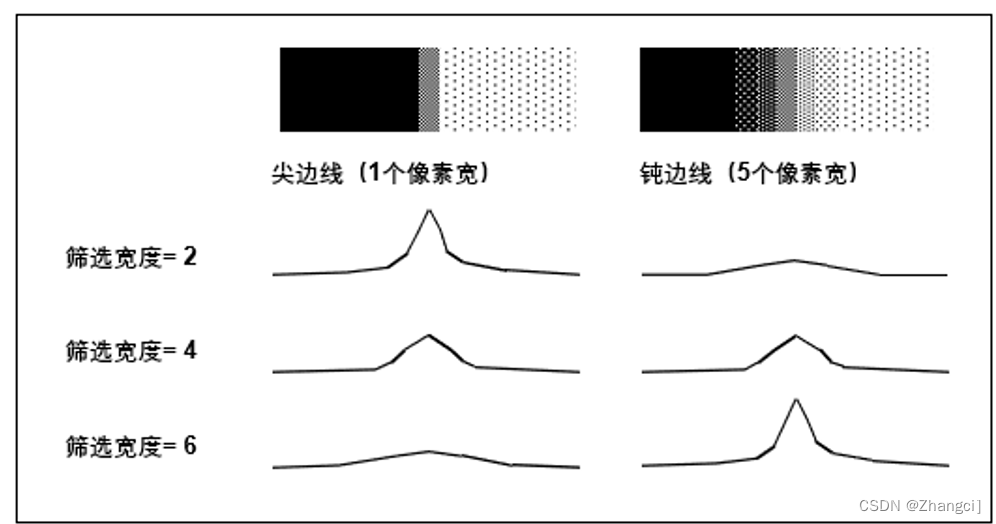
筛选尺寸
筛选尺寸接近边线尺寸生产较强的边线峰值
筛选尺寸太大或者太小会减少峰值
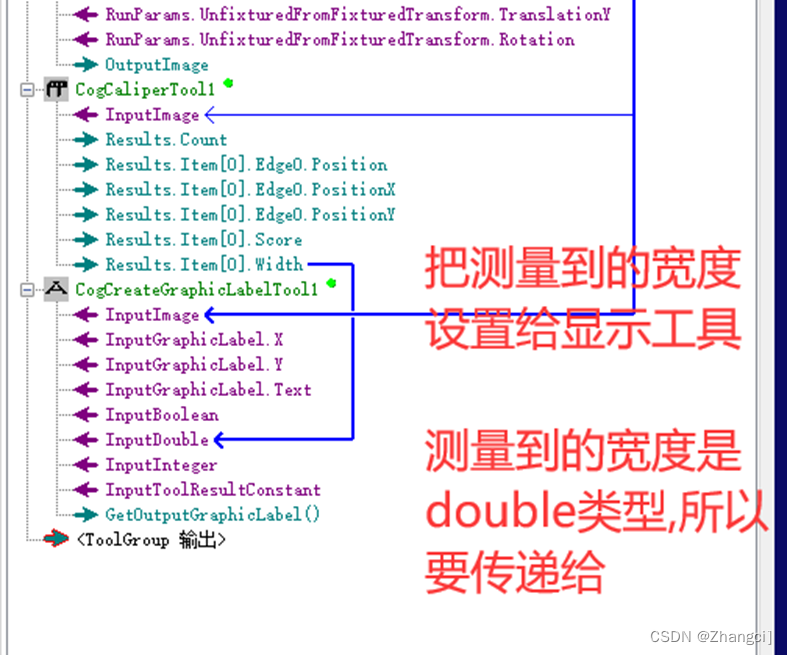
测量宽度的显示
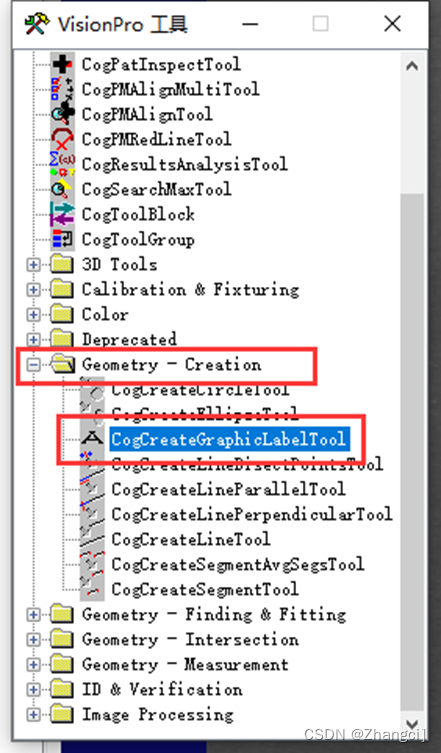
CogCreateGraphicLabelTool工具
用于标识或注释图像中的关键信息或区域,可以在图像上添加信息(文本/坐标)。
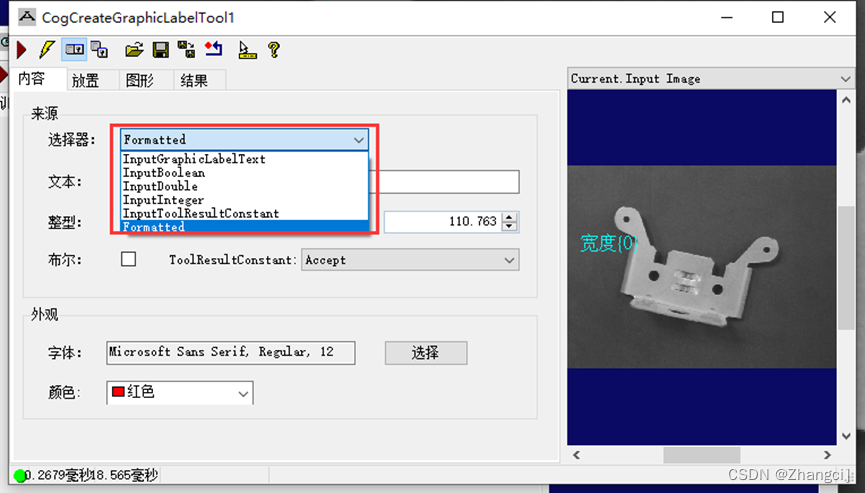
工具页面参数
选择器:
InputGraphicLabelText 文本
InputBoolean 布尔值
InputDouble Double类型
InputToolResultConstsnt
Formatted:格式化 可以按照字符串的格式进行输出 如: {D:F2}D表示十进制 F2小数点后保留两位小数
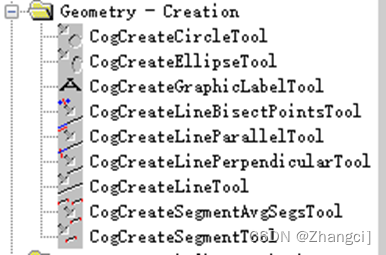
几何学工具
创建工具
根据提供的输入创建指定的几何形状
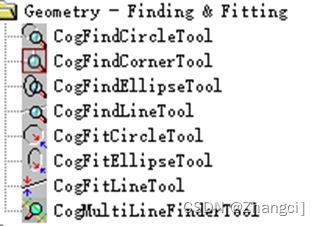
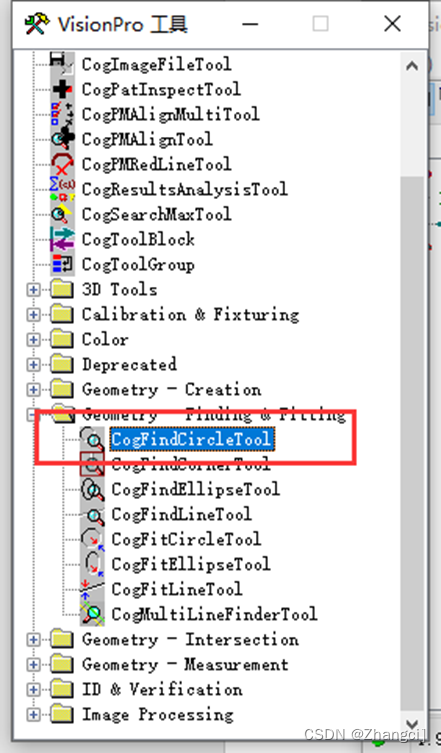
查找和匹配工具
查找工具使用工具中包括的游标卡尺的结果创建指定的形状
匹配工具使用从其他工具的输入创建一个最佳匹配形状
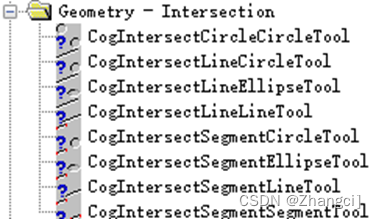
交叉工具
计算来自输入形状的交叉点
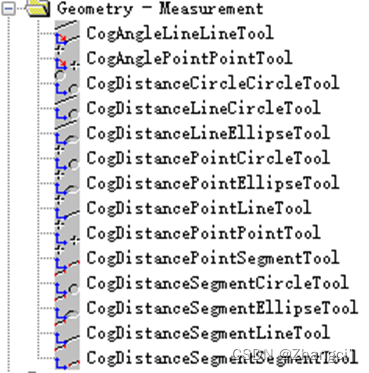
测量工具
计算角度和/或输入形状之间的距离
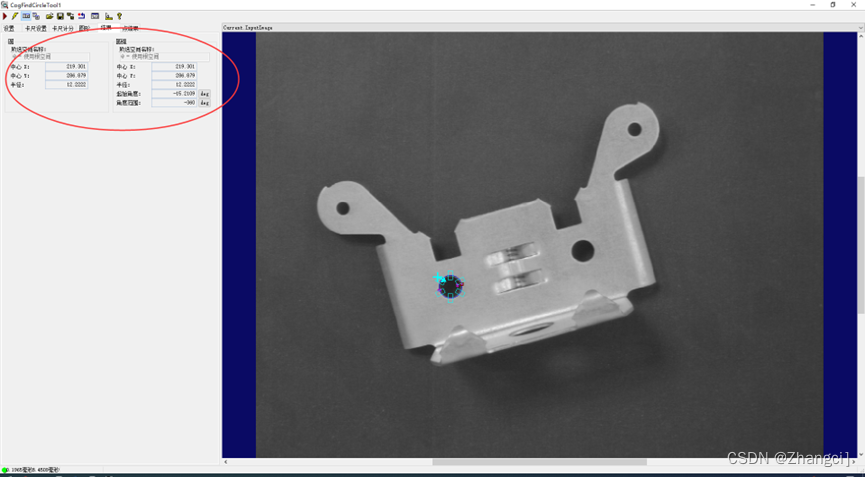
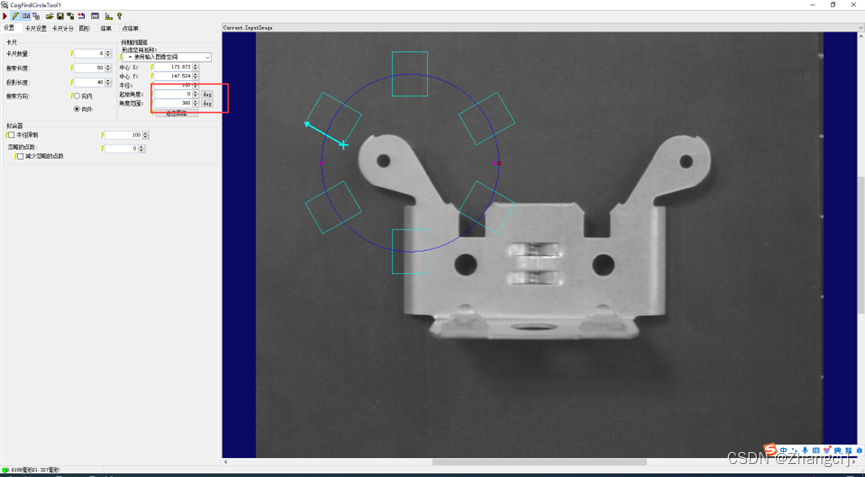
举例:找圆工具
CogFindCircleTool
界面

参数介绍
卡尺数量
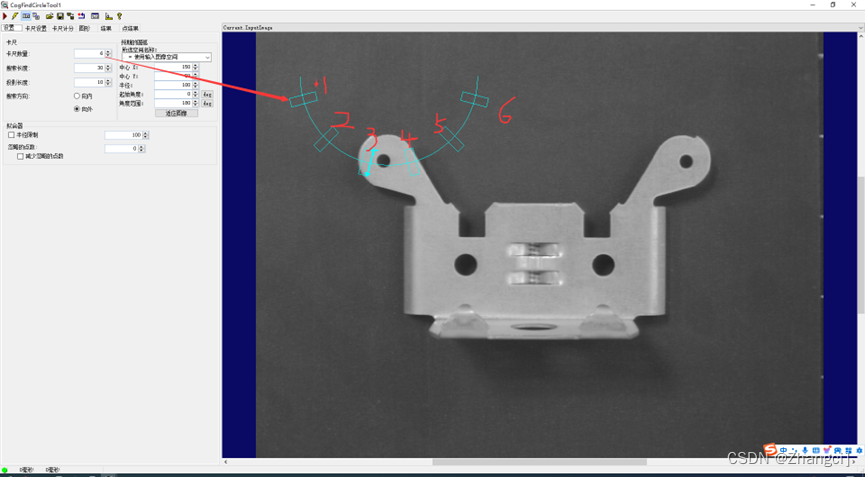
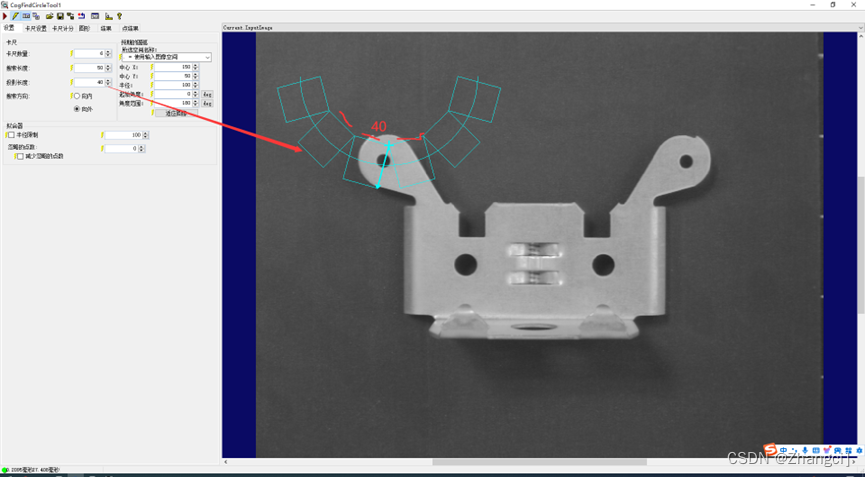
搜索长度
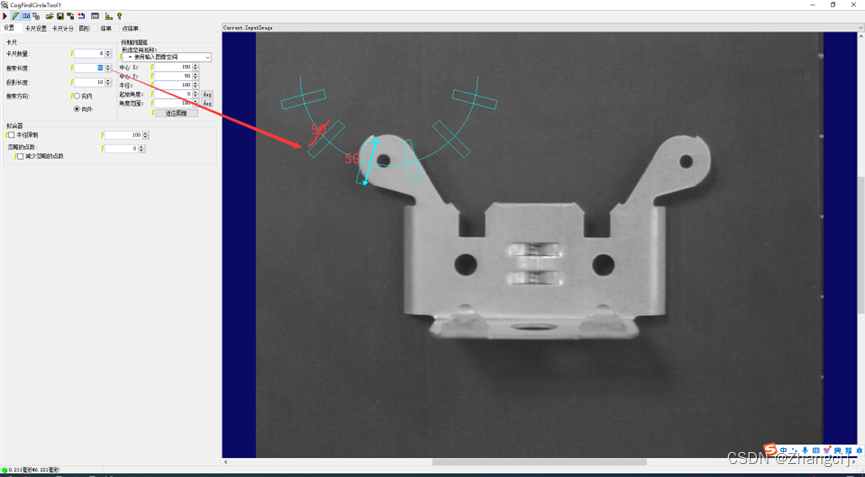
投影长度
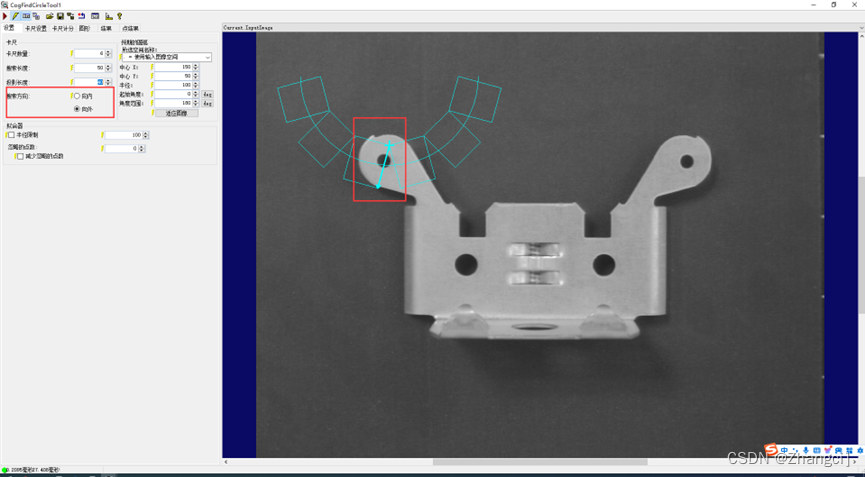
搜索方向
中心xy
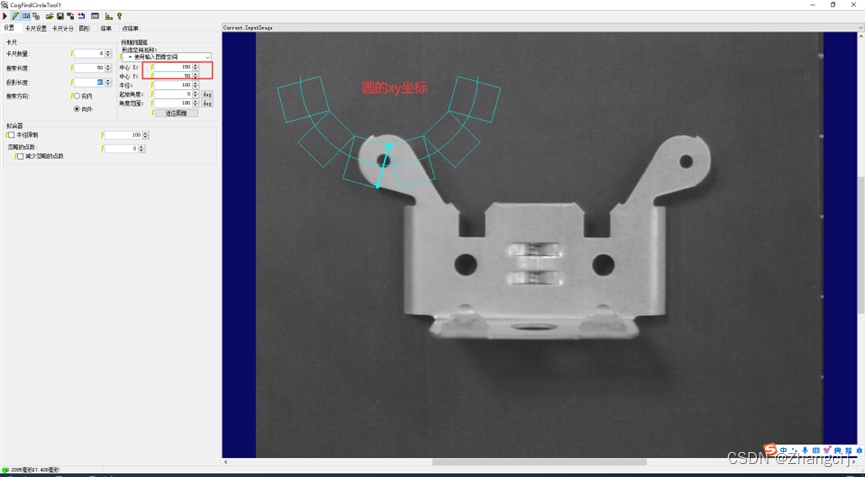
半径
起始角度角度范围
0-180 设置半圆 0 -360 整圆
选择
运行
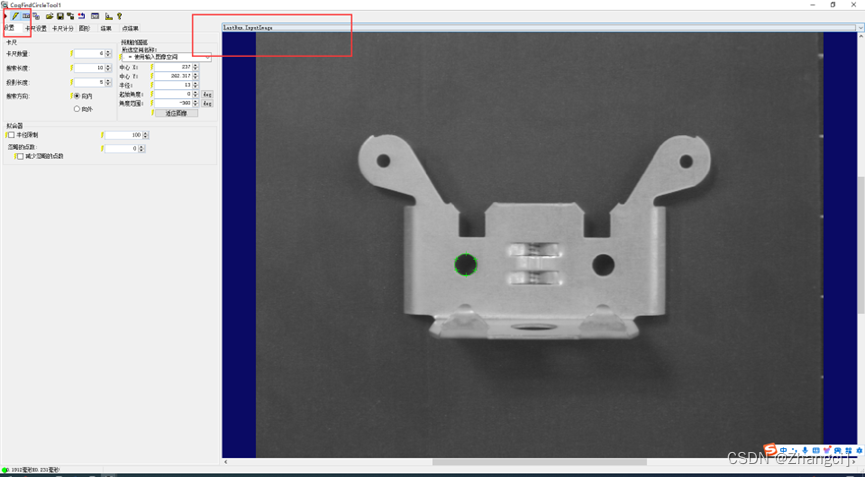
半径限制
忽略点数

结果: