源码地址
1. 源码概述
源码里一共包含了5个py文件
- 单机模型(Normal_ResNet_HAM10000.py)
- 联邦模型(FL_ResNet_HAM10000.py)
- 本地模拟的SFLV1(SFLV1_ResNet_HAM10000.py)
- 网络socket下的SFLV2(SFLV2_ResNet_HAM10000.py)
- 使用了DP+PixelDP隐私技术(SL_ResNet_HAM10000.py)
使用的数据集是:HAM10000 数据集是常见色素性皮肤病变的多源皮肤图像大集合。
做的是图像分类的工作。
2. Normal_ResNet_HAM10000.py
这是一个基础模型,可以在单机上进行训练和验证(有点基础的同学应该都可以看懂)。让我们来分析一下这个文件中一些主要类和方法:
2.1 SkinData(Dataset)
自定义的数据集,继承自Dataset,主要实现
class SkinData(Dataset):
def __init__(self, df, transform = None):
self.df = df
self.transform = transform
def __len__(self):
return len(self.df)
def __getitem__(self, index):
X = Image.open(self.df['path'][index]).resize((64, 64))
y = torch.tensor(int(self.df['target'][index]))
// 进行数据增强
if self.transform:
X = self.transform(X)
return X, y
2.2 ResNet18模型
def conv3x3(in_planes, out_planes, stride=1):
"3x3 convolution with padding"
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet18(nn.Module):
def __init__(self, block, layers, num_classes=1000):
self.inplanes = 64
super(ResNet18, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
2.3 训练+验证
def calculate_accuracy(fx, y):
preds = fx.max(1, keepdim=True)[1]
correct = preds.eq(y.view_as(preds)).sum()
acc = correct.float()/preds.shape[0]
return acc
#==========================================================================================================================
def train(model, device, iterator, optimizer, criterion):
epoch_loss = 0
epoch_acc = 0
model.train()
ell = len(iterator)
for (x, y) in iterator:
x = x.to(device)
y = y.to(device)
optimizer.zero_grad() # initialize gradients to zero
# ------------- Forward propagation ----------
fx = model(x)
loss = criterion(fx, y)
acc = calculate_accuracy (fx , y)
# -------- Backward propagation -----------
loss.backward()
optimizer.step()
epoch_loss += loss.item()
epoch_acc += acc.item()
return epoch_loss / ell, epoch_acc / ell
def evaluate(model, device, iterator, criterion):
epoch_loss = 0
epoch_acc = 0
model.eval()
ell = len(iterator)
with torch.no_grad():
for (x,y) in iterator:
x = x.to(device)
y = y.to(device)
optimizer.zero_grad()
fx = model(x)
loss = criterion(fx, y)
acc = calculate_accuracy (fx , y)
epoch_loss += loss.item()
epoch_acc += acc.item()
return epoch_loss/ell, epoch_acc/ell
2.4 组合代码进行训练
epochs = 200 #迭代次数
LEARNING_RATE = 0.0001 #学习率
criterion = nn.CrossEntropyLoss() #损失函数
optimizer = torch.optim.Adam(net_glob.parameters(), lr = LEARNING_RATE) #优化器
loss_train_collect = []
loss_test_collect = []
acc_train_collect = []
acc_test_collect = []
start_time = time.time()
for epoch in range(epochs):
train_loss, train_acc = train(net_glob, device, train_iterator, optimizer, criterion) #训练
test_loss, test_acc = evaluate(net_glob, device, test_iterator, criterion) #验证
loss_train_collect.append(train_loss)
loss_test_collect.append(test_loss)
acc_train_collect.append(train_acc)
acc_test_collect.append(test_acc)
prRed(f'Train => Epoch: {epoch} \t Acc: {train_acc*100:05.2f}% \t Loss: {train_loss:.3f}')
prGreen(f'Test => \t Acc: {test_acc*100:05.2f}% \t Loss: {test_loss:.3f}')
elapsed = (time.time() - start_time)/60
print(f'Total Training Time: {elapsed:.2f} min')
3. FL_ResNet_HAM10000.py
接下来来解读这个文件:这个文件是一个本地模拟联邦的文件。模型大体上的代码是差不多的,让我们来看一下差异之处。
3.1 DatasetSplit
这是一个数据集,使用idxs来切分不同的数据。
class DatasetSplit(Dataset):
def __init__(self, dataset, idxs):
self.dataset = dataset
self.idxs = list(idxs)
def __len__(self):
# 数据的长度是idx列表的长度
return len(self.idxs)
def __getitem__(self, item):
image, label = self.dataset[self.idxs[item]]
return image, label
3.2 LocalUpdate
与训练和测试有关的客户端功能
class LocalUpdate(object):
def __init__(self, idx, lr, device, dataset_train = None, dataset_test = None, idxs = None, idxs_test = None):
self.idx = idx #本地客户端编号
self.device = device
self.lr = lr
self.local_ep = 1
self.loss_func = nn.CrossEntropyLoss()
self.selected_clients = []
self.ldr_train = DataLoader(DatasetSplit(dataset_train, idxs), batch_size = 256, shuffle = True)
self.ldr_test = DataLoader(DatasetSplit(dataset_test, idxs_test), batch_size = 256, shuffle = True)
def train(self, net):
net.train()
......
return net.state_dict(), sum(epoch_loss) / len(epoch_loss), sum(epoch_acc) / len(epoch_acc)
def evaluate(self, net):
net.eval()
.....
return sum(epoch_loss) / len(epoch_loss), sum(epoch_acc) / len(epoch_acc)
如何生成对应的数据集的idx,即如何模拟各个客户端拥有一部分数据,通过dataset_iid(dataset_train, num_users)这个函数完成。
def dataset_iid(dataset, num_users):
num_items = int(len(dataset) / num_users)
dict_users, all_idxs = {}, [i for i in range(len(dataset))]
for i in range(num_users):
# 随机从集合中获取num_items个idx
dict_users[i] = set(np.random.choice(all_idxs, num_items, replace=False))
# 从集合中删除已经分配掉的idx
all_idxs = list(set(all_idxs) - dict_users[i])
return dict_users
3.3 代码整合
net_glob.train() #将模型切换为训练模式
w_glob = net_glob.state_dict() #拷贝模型的权重
loss_train_collect = []
acc_train_collect = []
loss_test_collect = []
acc_test_collect = []
for iter in range(epochs):
#
w_locals, loss_locals_train, acc_locals_train, loss_locals_test, acc_locals_test = [], [], [], [], []
m = max(int(frac * num_users), 1)
idxs_users = np.random.choice(range(num_users), m, replace = False) #生成用户idxs的序列
# 对于每一个客户端进行模型训练
for idx in idxs_users: # each client
local = LocalUpdate(idx, lr, device, dataset_train = dataset_train, dataset_test = dataset_test, idxs = dict_users[idx], idxs_test = dict_users_test[idx])
# Training ------------------收集每一个客户端的w, loss_train, acc_train
w, loss_train, acc_train = local.train(net = copy.deepcopy(net_glob).to(device))# 使用服务端的参数进行模型的训练,经过该客户端本地的数据训练后产生一个新的模型参数
w_locals.append(copy.deepcopy(w))
loss_locals_train.append(copy.deepcopy(loss_train))
acc_locals_train.append(copy.deepcopy(acc_train))
# Testing -------------------收集每一个客户端的loss_test, acc_test
loss_test, acc_test = local.evaluate(net = copy.deepcopy(net_glob).to(device))
loss_locals_test.append(copy.deepcopy(loss_test))
acc_locals_test.append(copy.deepcopy(acc_test))
# Federation process 聚合各个客户端的w
w_glob = FedAvg(w_locals)
print("------------------------------------------------")
print("------ Federation process at Server-Side -------")
print("------------------------------------------------")
# update global model --- copy weight to net_glob -- distributed the model to all users //更新全局模型
net_glob.load_state_dict(w_glob)
# Train/Test accuracy 添加训练和测试的准确率
acc_avg_train = sum(acc_locals_train) / len(acc_locals_train)
acc_train_collect.append(acc_avg_train)
acc_avg_test = sum(acc_locals_test) / len(acc_locals_test)
acc_test_collect.append(acc_avg_test)
# Train/Test loss 添加训练和测试的loss
loss_avg_train = sum(loss_locals_train) / len(loss_locals_train)
loss_train_collect.append(loss_avg_train)
loss_avg_test = sum(loss_locals_test) / len(loss_locals_test)
loss_test_collect.append(loss_avg_test)
print('------------------- SERVER ----------------------------------------------')
print('Train: Round {:3d}, Avg Accuracy {:.3f} | Avg Loss {:.3f}'.format(iter, acc_avg_train, loss_avg_train))
print('Test: Round {:3d}, Avg Accuracy {:.3f} | Avg Loss {:.3f}'.format(iter, acc_avg_test, loss_avg_test))
print('-------------------------------------------------------------------------')
#===================================================================================
print("Training and Evaluation completed!")
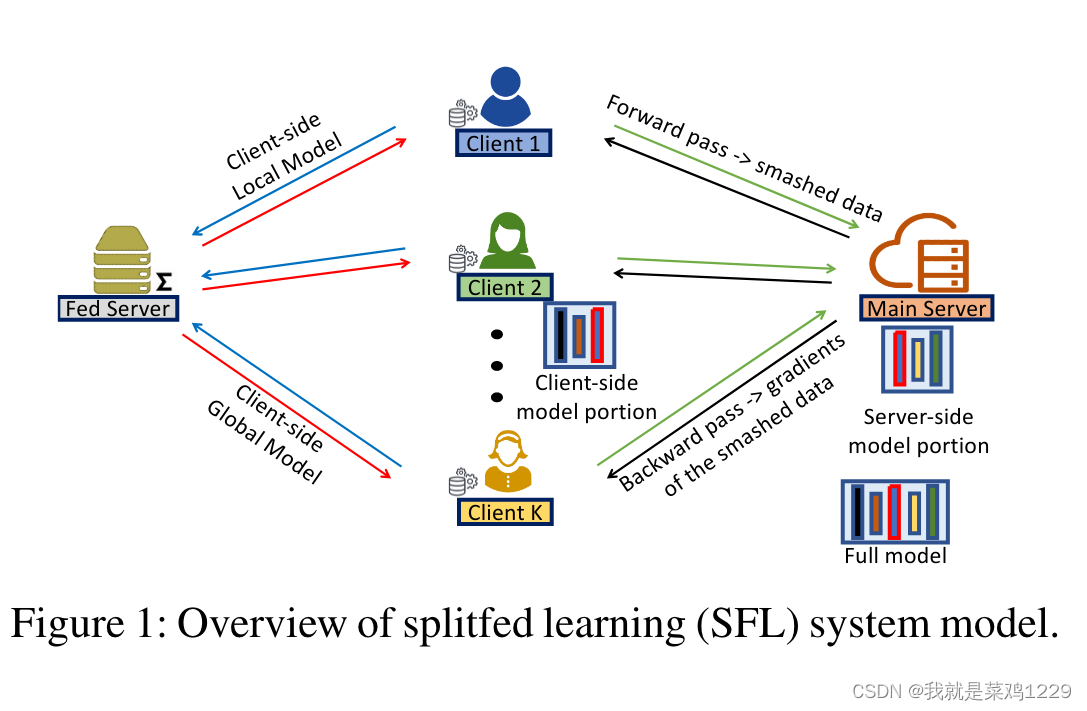
4. SFLV1_ResNet_HAM10000.py
这个文件是论文中主要提到的模型,实现了拆分学习和联邦学习的结合。
4.1 ResNet18_client_side
这段代码定义了客户端部分的数据提取部分:
class ResNet18_client_side(nn.Module):
def __init__(self):
super(ResNet18_client_side, self).__init__()
self.layer1 = nn.Sequential (
nn.Conv2d(3, 64, kernel_size = 7, stride = 2, padding = 3, bias = False),
nn.BatchNorm2d(64),
nn.ReLU (inplace = True),
nn.MaxPool2d(kernel_size = 3, stride = 2, padding =1),
)
self.layer2 = nn.Sequential (
nn.Conv2d(64, 64, kernel_size = 3, stride = 1, padding = 1, bias = False),
nn.BatchNorm2d(64),
nn.ReLU (inplace = True),
nn.Conv2d(64, 64, kernel_size = 3, stride = 1, padding = 1),
nn.BatchNorm2d(64),
)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def forward(self, x):
resudial1 = F.relu(self.layer1(x))
out1 = self.layer2(resudial1)
out1 = out1 + resudial1 # adding the resudial inputs -- downsampling not required in this layer
resudial2 = F.relu(out1)
return resudial2
4.2 ResNet18_server_side
我们可以看出客户端的模型+服务器的模型才是一个完整的模型
class ResNet18_server_side(nn.Module):
def __init__(self, block, num_layers, classes):
super(ResNet18_server_side, self).__init__()
self.input_planes = 64
self.layer3 = nn.Sequential (
nn.Conv2d(64, 64, kernel_size = 3, stride = 1, padding = 1),
nn.BatchNorm2d(64),
nn.ReLU (inplace = True),
nn.Conv2d(64, 64, kernel_size = 3, stride = 1, padding = 1),
nn.BatchNorm2d(64),
)
self.layer4 = self._layer(block, 128, num_layers[0], stride = 2)
self.layer5 = self._layer(block, 256, num_layers[1], stride = 2)
self.layer6 = self._layer(block, 512, num_layers[2], stride = 2)
self. averagePool = nn.AvgPool2d(kernel_size = 7, stride = 1)
self.fc = nn.Linear(512 * block.expansion, classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _layer(self, block, planes, num_layers, stride = 2):
dim_change = None
if stride != 1 or planes != self.input_planes * block.expansion:
dim_change = nn.Sequential(nn.Conv2d(self.input_planes, planes*block.expansion, kernel_size = 1, stride = stride),
nn.BatchNorm2d(planes*block.expansion))
netLayers = []
netLayers.append(block(self.input_planes, planes, stride = stride, dim_change = dim_change))
self.input_planes = planes * block.expansion
for i in range(1, num_layers):
netLayers.append(block(self.input_planes, planes))
self.input_planes = planes * block.expansion
return nn.Sequential(*netLayers)
def forward(self, x):
out2 = self.layer3(x)
out2 = out2 + x # adding the resudial inputs -- downsampling not required in this layer
x3 = F.relu(out2)
x4 = self. layer4(x3)
x5 = self.layer5(x4)
x6 = self.layer6(x5)
x7 = F.avg_pool2d(x6, 7)
x8 = x7.view(x7.size(0), -1)
y_hat =self.fc(x8)
return y_hat
4.3 服务器端的训练函数
# fx_client 客户端提取后的输出
# y 对应的标签
# l_epoch_count epoch的总数
# l_epoch 当前是第i轮epoch
# idx 客户端标识
# len_batch batch的大小
def train_server(fx_client, y, l_epoch_count, l_epoch, idx, len_batch):
#声明全局变量,方便直接进行修改外部同名变量
global net_model_server, criterion, optimizer_server, device, batch_acc_train, batch_loss_train, l_epoch_check, fed_check
global loss_train_collect, acc_train_collect, count1, acc_avg_all_user_train, loss_avg_all_user_train, idx_collect, w_locals_server, w_glob_server, net_server
global loss_train_collect_user, acc_train_collect_user, lr
net_server = copy.deepcopy(net_model_server[idx]).to(device)#根据idx获取对应的服务端的模型
net_server.train()
optimizer_server = torch.optim.Adam(net_server.parameters(), lr = lr)
# train and update
optimizer_server.zero_grad()
fx_client = fx_client.to(device)# 将客户端返回的中间数据放入device
y = y.to(device)
#---------forward prop模型推理-------------
fx_server = net_server(fx_client)
# calculate loss
loss = criterion(fx_server, y)
# calculate accuracy
acc = calculate_accuracy(fx_server, y)
#--------backward prop--------------
loss.backward()
dfx_client = fx_client.grad.clone().detach()#获得模型的梯度并返回
optimizer_server.step()
batch_loss_train.append(loss.item())
batch_acc_train.append(acc.item())
# 更新当前轮次对应的server-side模型
net_model_server[idx] = copy.deepcopy(net_server)
# count1: to track the completion of the local batch associated with one client
count1 += 1
if count1 == len_batch:# 判断是否完成一个本地轮次:当count1等于len_batch时,计算本批次平均精度和损失,清空训练损失和精度集合,重置计数器,并打印训练信息。
acc_avg_train = sum(batch_acc_train)/len(batch_acc_train)
loss_avg_train = sum(batch_loss_train)/len(batch_loss_train)
batch_acc_train = []
batch_loss_train = []
count1 = 0
prRed('Client{} Train => Local Epoch: {} \tAcc: {:.3f} \tLoss: {:.4f}'.format(idx, l_epoch_count, acc_avg_train, loss_avg_train))
# 保存当前模型权重:保存当前服务器端模型权重到w_server
w_server = net_server.state_dict()
if l_epoch_count == l_epoch-1:# 判断是否完成一个一定数量的epoch
l_epoch_check = True
#将当前模型权重添加到本地权重列表w_locals_server
w_locals_server.append(copy.deepcopy(w_server))
#计算并保存当前客户端最后一个批次的精度和损失(非平均值)
acc_avg_train_all = acc_avg_train
loss_avg_train_all = loss_avg_train
loss_train_collect_user.append(loss_avg_train_all)
acc_train_collect_user.append(acc_avg_train_all)
# 将当前客户端索引添加到用户索引集合idx_collect
if idx not in idx_collect:
idx_collect.append(idx)
# 如果已收集到所有用户的索引,设置fed_check为True,表示触发联邦过程
if len(idx_collect) == num_users:
fed_check = True # to
# 聚合通过各个客户端训练得到的服务器模型
w_glob_server = FedAvg(w_locals_server)
# 服务器端的全局模型更新
net_glob_server.load_state_dict(w_glob_server)
net_model_server = [net_glob_server for i in range(num_users)]
w_locals_server = []
idx_collect = []
acc_avg_all_user_train = sum(acc_train_collect_user)/len(acc_train_collect_user)
loss_avg_all_user_train = sum(loss_train_collect_user)/len(loss_train_collect_user)
loss_train_collect.append(loss_avg_all_user_train)
acc_train_collect.append(acc_avg_all_user_train)
acc_train_collect_user = []
loss_train_collect_user = []
# send gradients to the client
return dfx_client
4.4 Client
class Client(object):
# net_client_mode 客户端模型
# idx 客户端id
# lr 学习率
# device 设备
# dataset_train 训练的数据集
# dataset_test 测试的数据集
# idxs 训练数据的子集
# idxs_test 测试数据的子集
def __init__(self, net_client_model, idx, lr, device, dataset_train = None, dataset_test = None, idxs = None, idxs_test = None):
self.idx = idx
self.device = device
self.lr = lr
self.local_ep = 1 #定义了本地的epoch
self.ldr_train = DataLoader(DatasetSplit(dataset_train, idxs), batch_size = 256, shuffle = True)
self.ldr_test = DataLoader(DatasetSplit(dataset_test, idxs_test), batch_size = 256, shuffle = True)
def train(self, net):
net.train()
optimizer_client = torch.optim.Adam(net.parameters(), lr = self.lr) #客户端的优化器
for iter in range(self.local_ep):
len_batch = len(self.ldr_train) #获取batch的长度
for batch_idx, (images, labels) in enumerate(self.ldr_train):
images, labels = images.to(self.device), labels.to(self.device)
optimizer_client.zero_grad()
fx = net(images) # 正向传播
client_fx = fx.clone().detach().requires_grad_(True) # 客户端提取的数据信息
# 获得反向传播的梯度
dfx = train_server(client_fx, labels, iter, self.local_ep, self.idx, len_batch)
#--------backward prop -------------
fx.backward(dfx) # 在客户端继续反向传播
optimizer_client.step()
# 返回更新后的网络参数
return net.state_dict()
def evaluate(self, net, ell):
net.eval()
with torch.no_grad():
len_batch = len(self.ldr_test)
for batch_idx, (images, labels) in enumerate(self.ldr_test):
images, labels = images.to(self.device), labels.to(self.device)
#---------forward prop-------------
fx = net(images) # 正向传播
evaluate_server(fx, labels, self.idx, len_batch, ell)
return
4.5 整合技术
#------------ Training And Testing -----------------
net_glob_client.train()
# 拷贝权重
w_glob_client = net_glob_client.state_dict()
# 联邦学习n轮
for iter in range(epochs):
m = max(int(frac * num_users), 1)
# 生成每个用户所拥有的数据的idx
idxs_users = np.random.choice(range(num_users), m, replace = False)
w_locals_client = []
for idx in idxs_users:
local = Client(net_glob_client, idx, lr, device, dataset_train = dataset_train, dataset_test = dataset_test, idxs = dict_users[idx], idxs_test = dict_users_test[idx])
# Training ------------------
# 训练,传给服务端,反向传播,更新后获得新的客户端模型参数
w_client = local.train(net = copy.deepcopy(net_glob_client).to(device))
w_locals_client.append(copy.deepcopy(w_client))
# Testing -------------------
local.evaluate(net = copy.deepcopy(net_glob_client).to(device), ell= iter)
# 对客户端的模型参数求平均
w_glob_client = FedAvg(w_locals_client)
# 更新客户端的全局模型
net_glob_client.load_state_dict(w_glob_client)
print("Training and Evaluation completed!")
5.总结
优点:
- 代码实现了分割学习和联邦学习的结合模拟实验
- 代码注释多,结构清晰
缺点:
- 仅仅只是一个单机实验,没有在真实的多机环境中进行实验



![春秋云境:CVE-2022-32991[漏洞复现]](https://img-blog.csdnimg.cn/direct/c4773e1bdfc849a79441e95bad7b7a61.png)