一、安装
二、电机模块
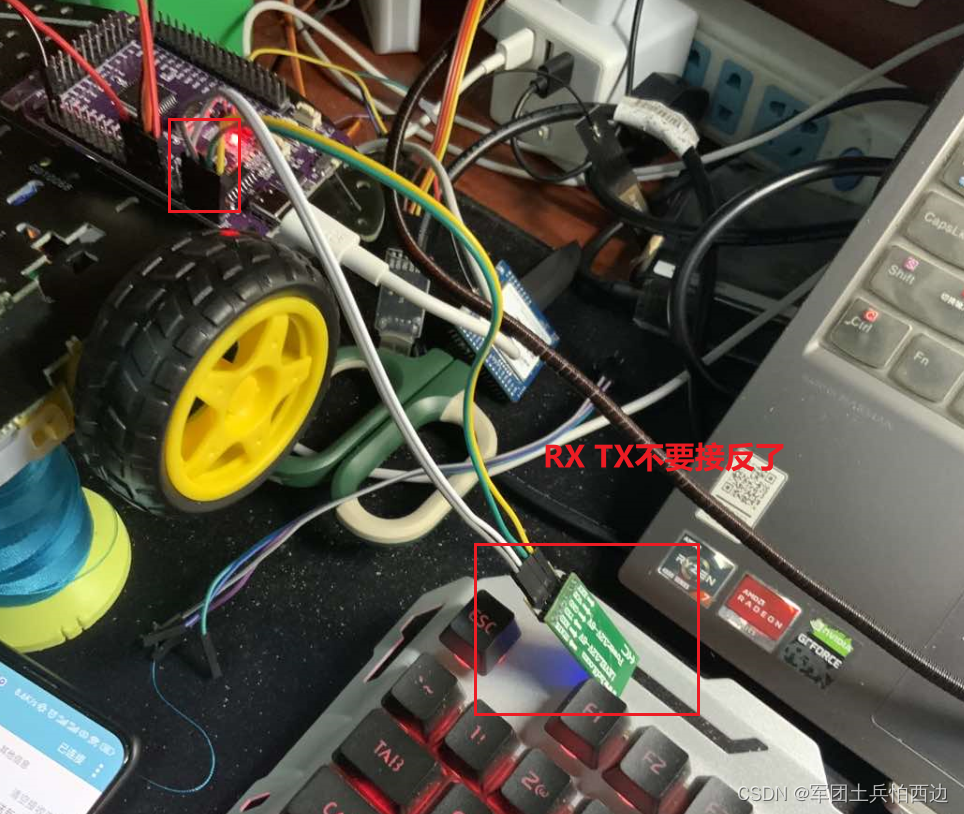
1.L9110S电机控制器接线

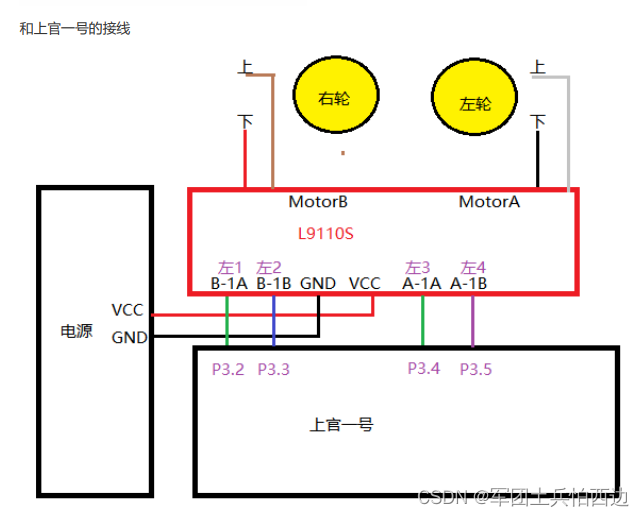
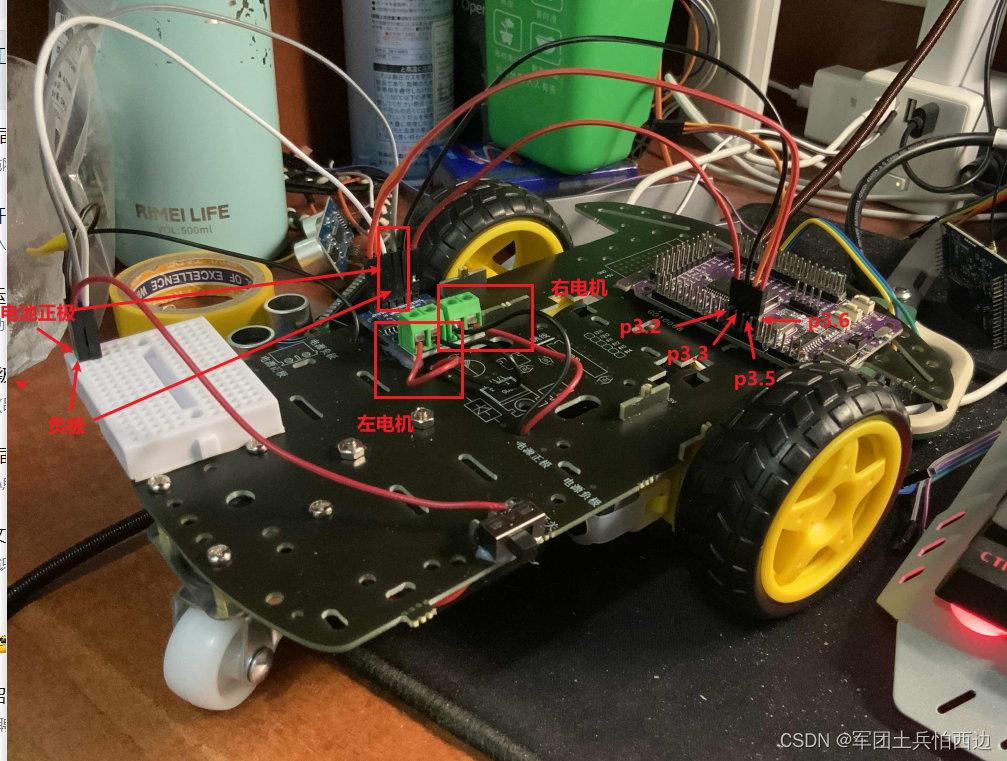
实物接线:
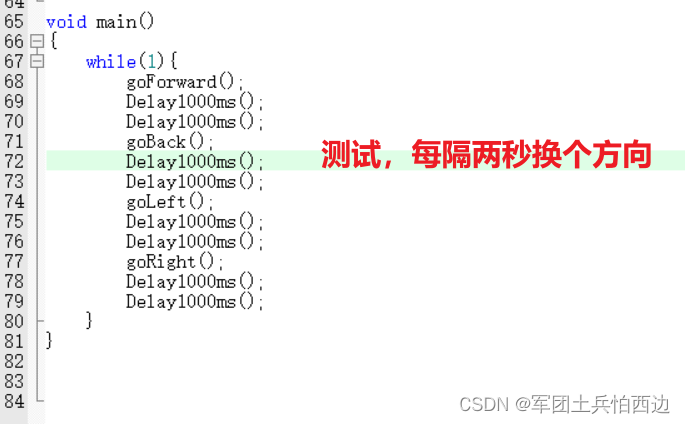
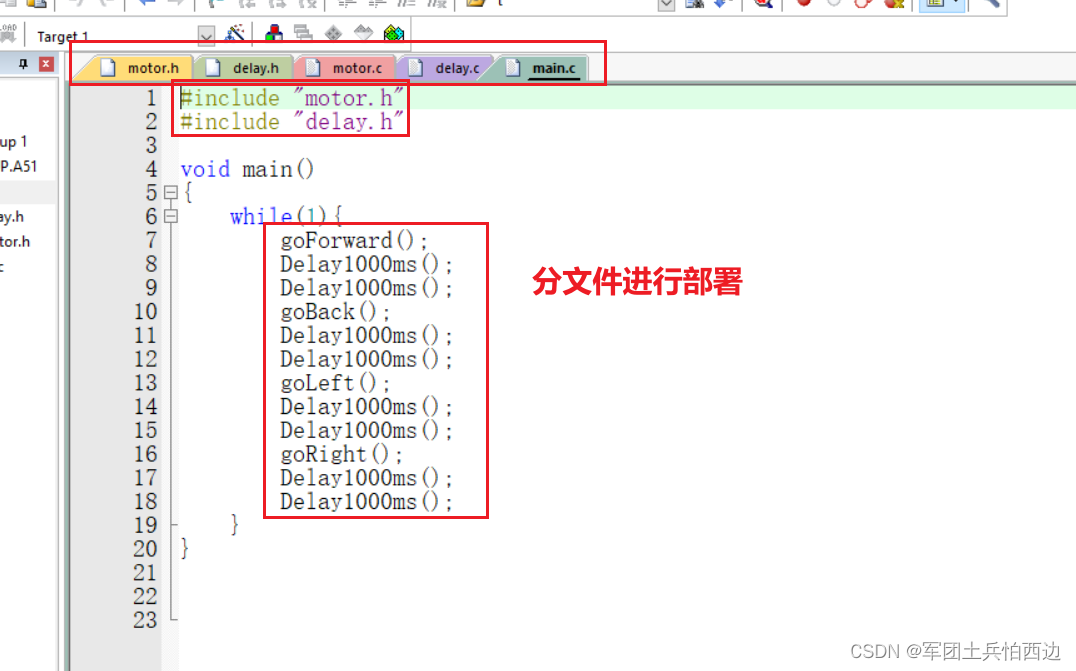
2.L9110前后左右控制小车

2.1分文件编写
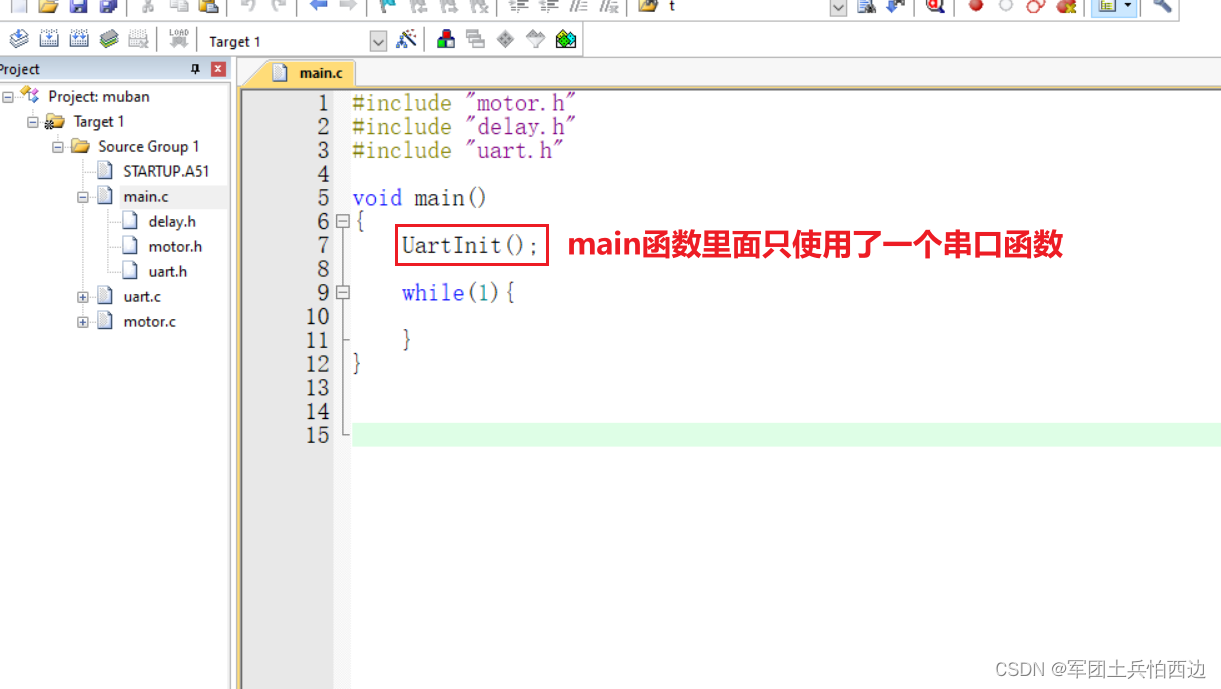
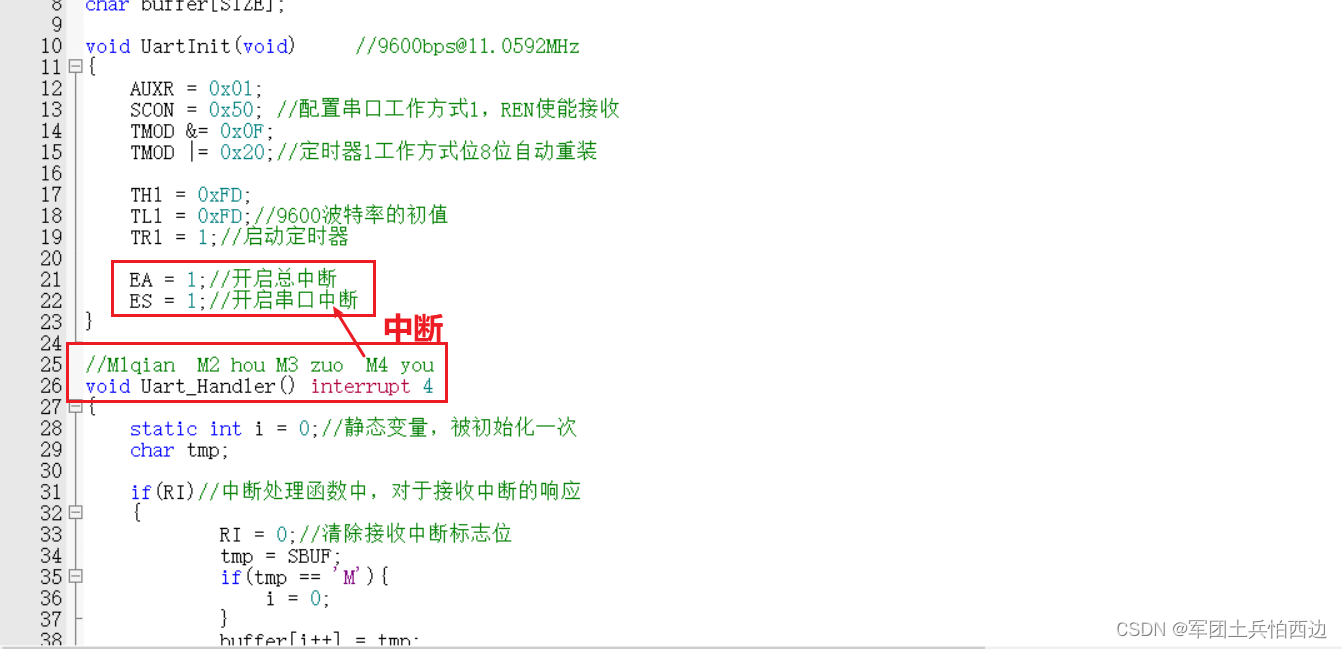
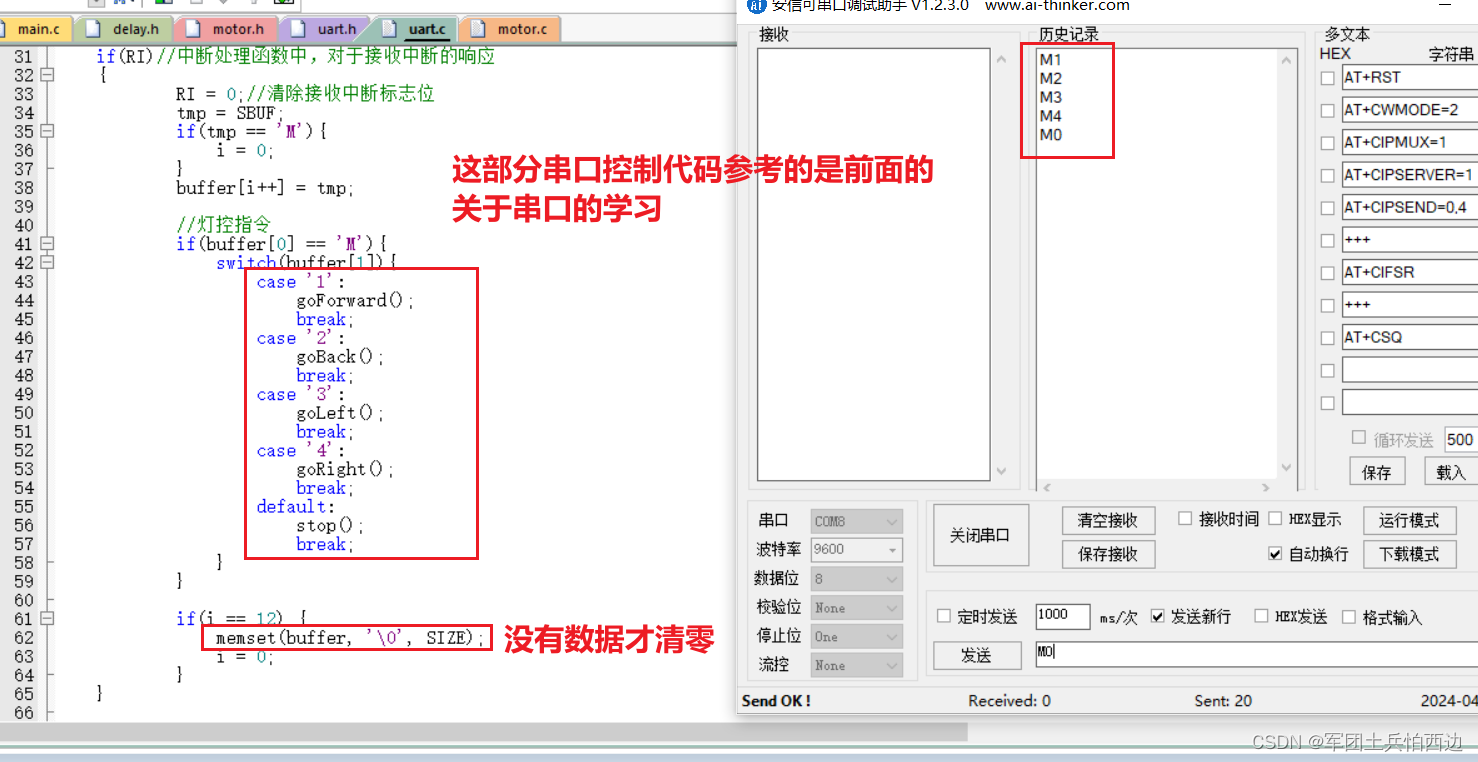
2.2使用串口发送以及使用中断优化
中断:
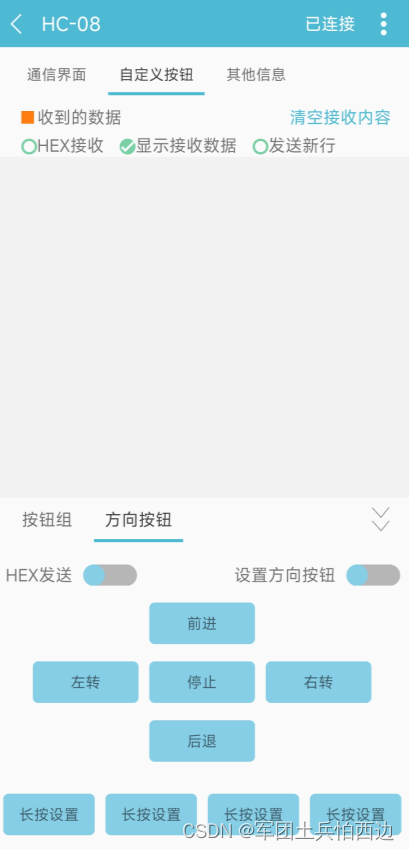
2.3增加蓝牙控制
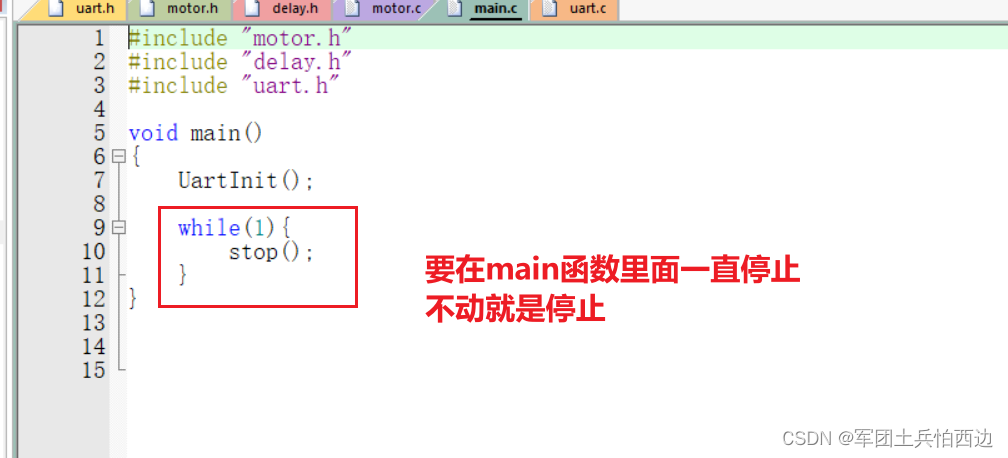
2.4设置点动的效果

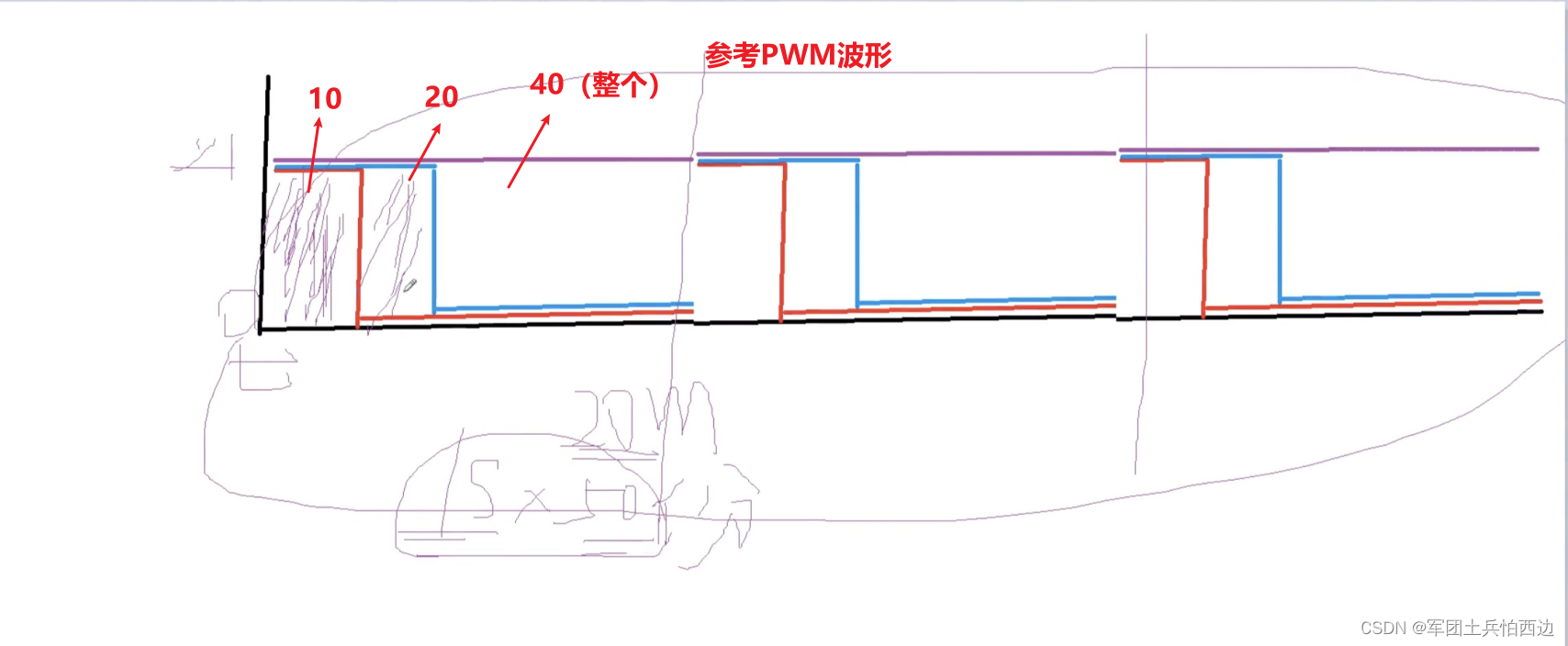
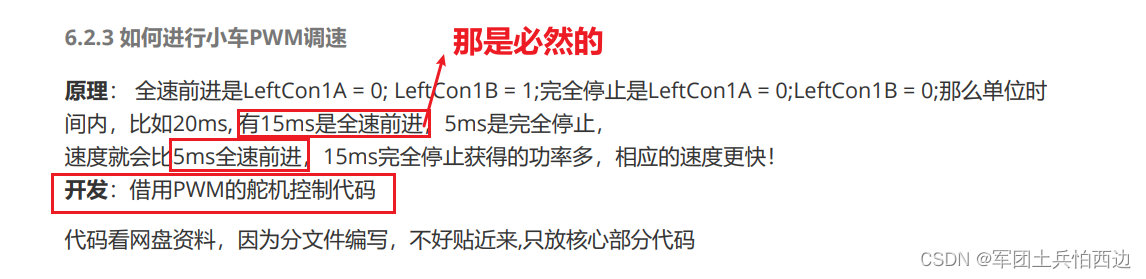
2.5软件调速的原理(参考PWM波)
原理:
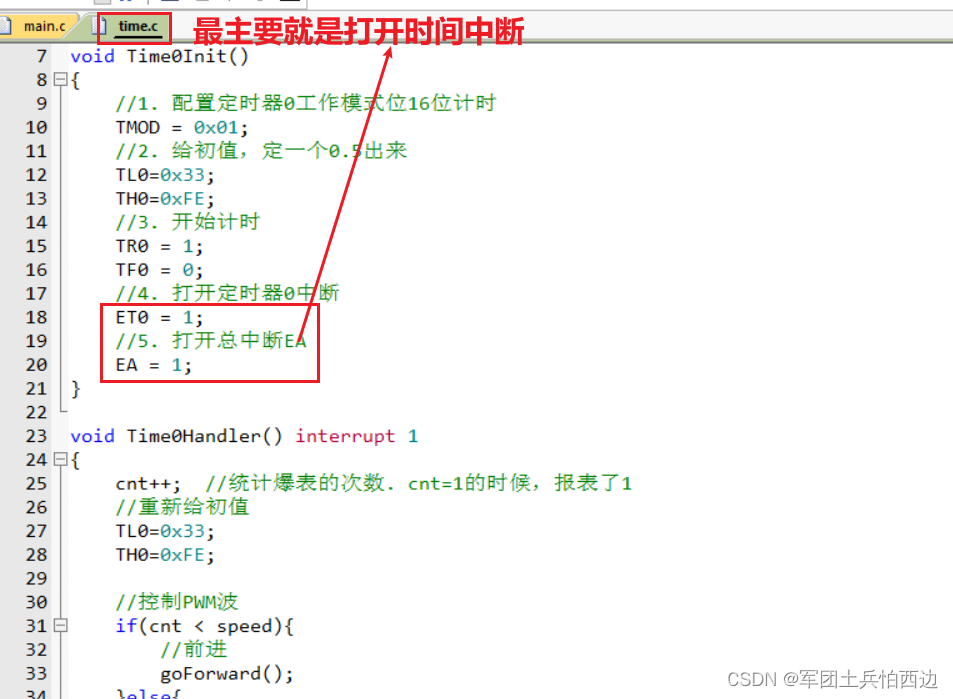
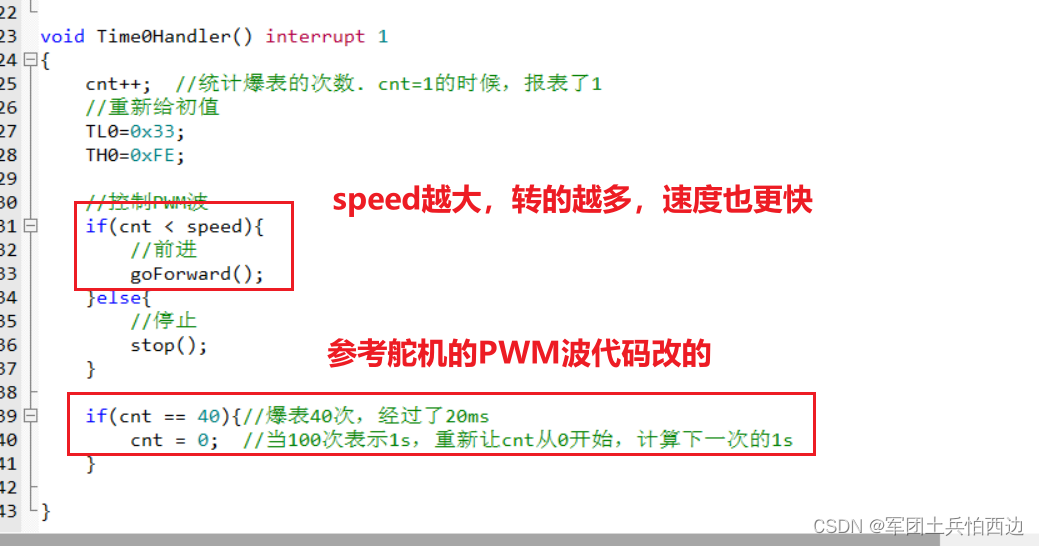
代码
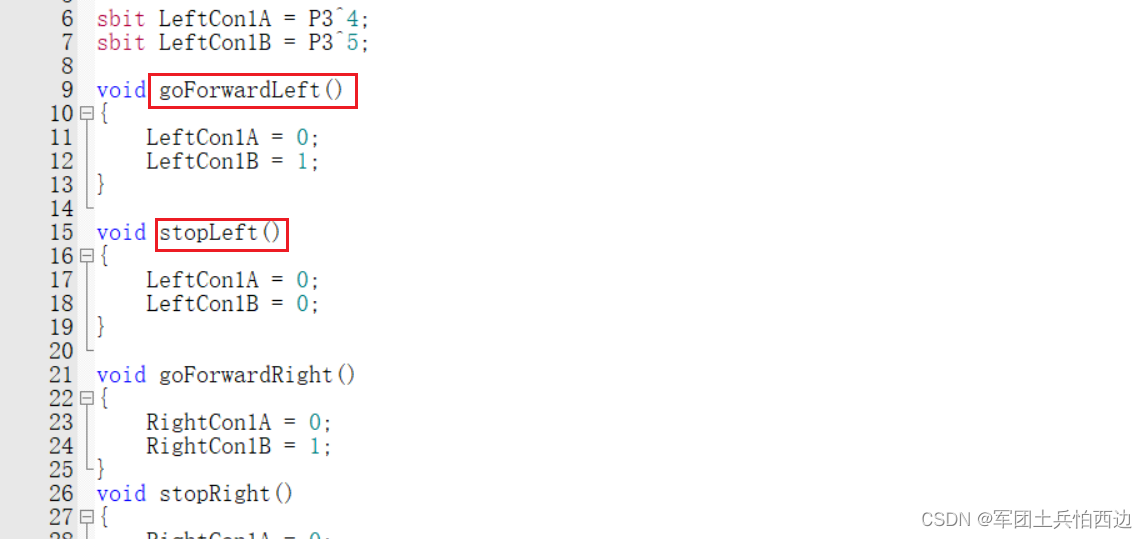
2.6左右电机的各自调速管理
原理

代码:
同时头文件也要加进来

配置定时器:



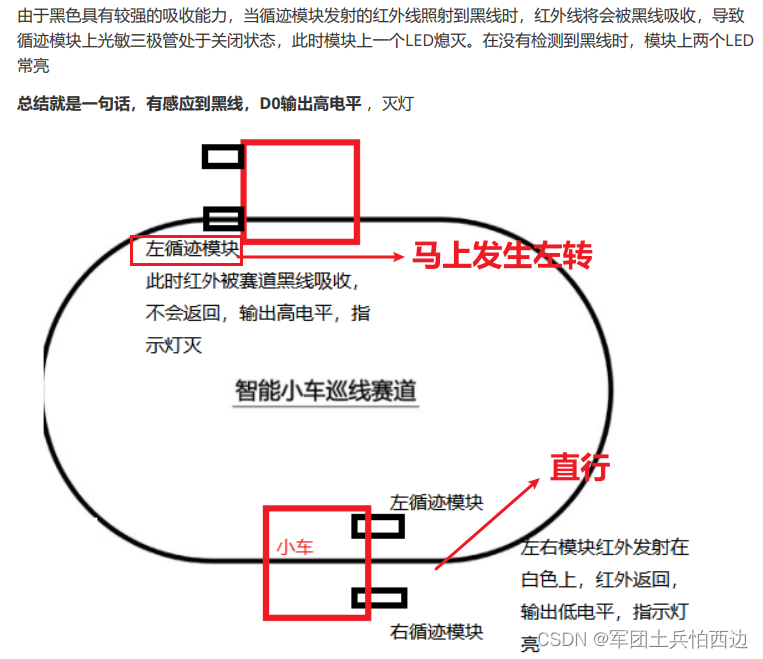
三、循迹小车
3.1模块的原理分析:

3.2 循迹小车的原理分析
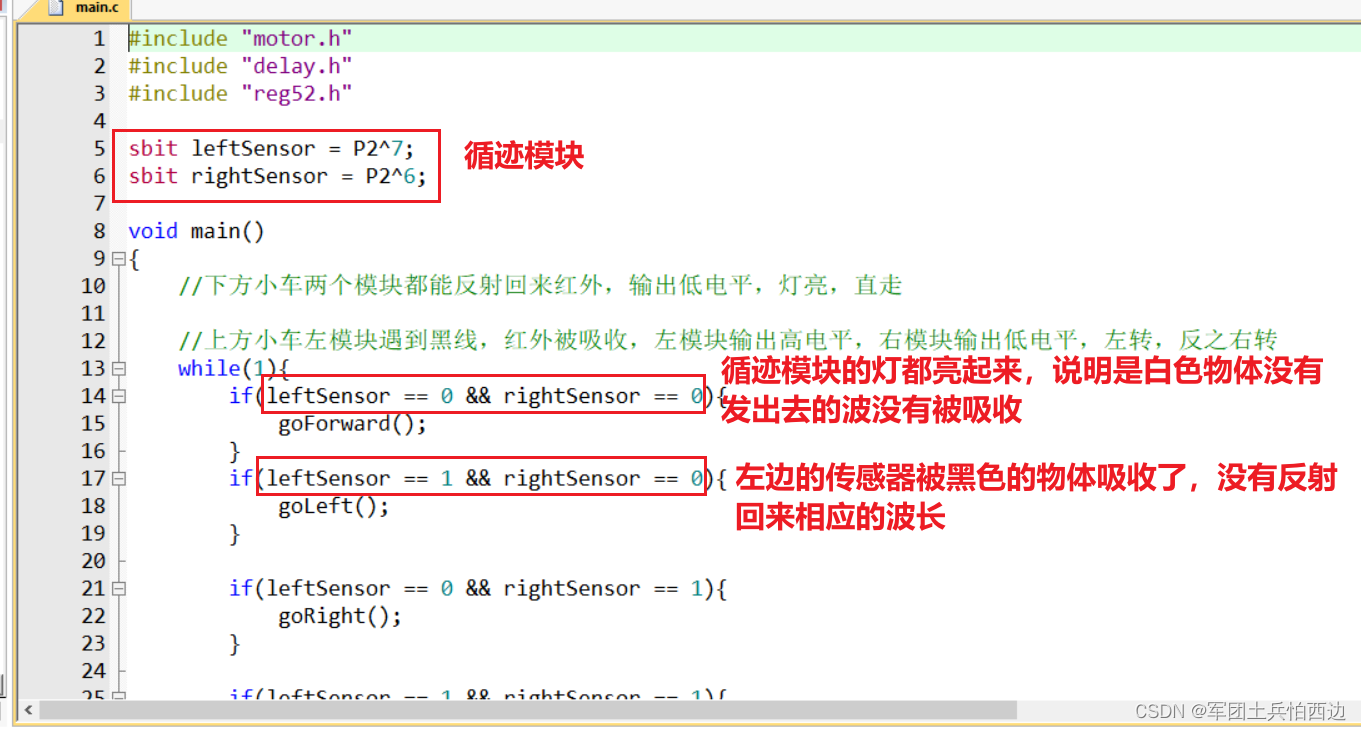
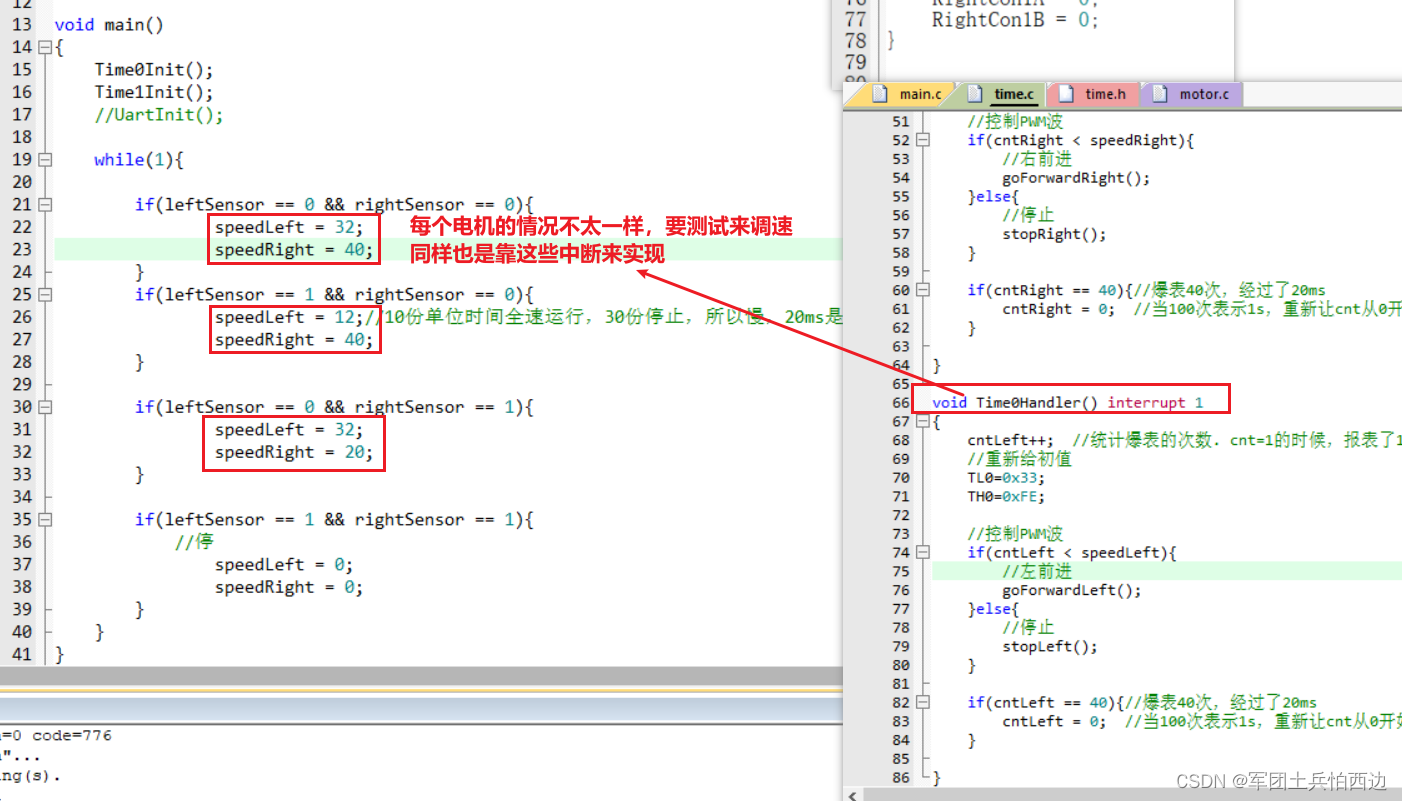
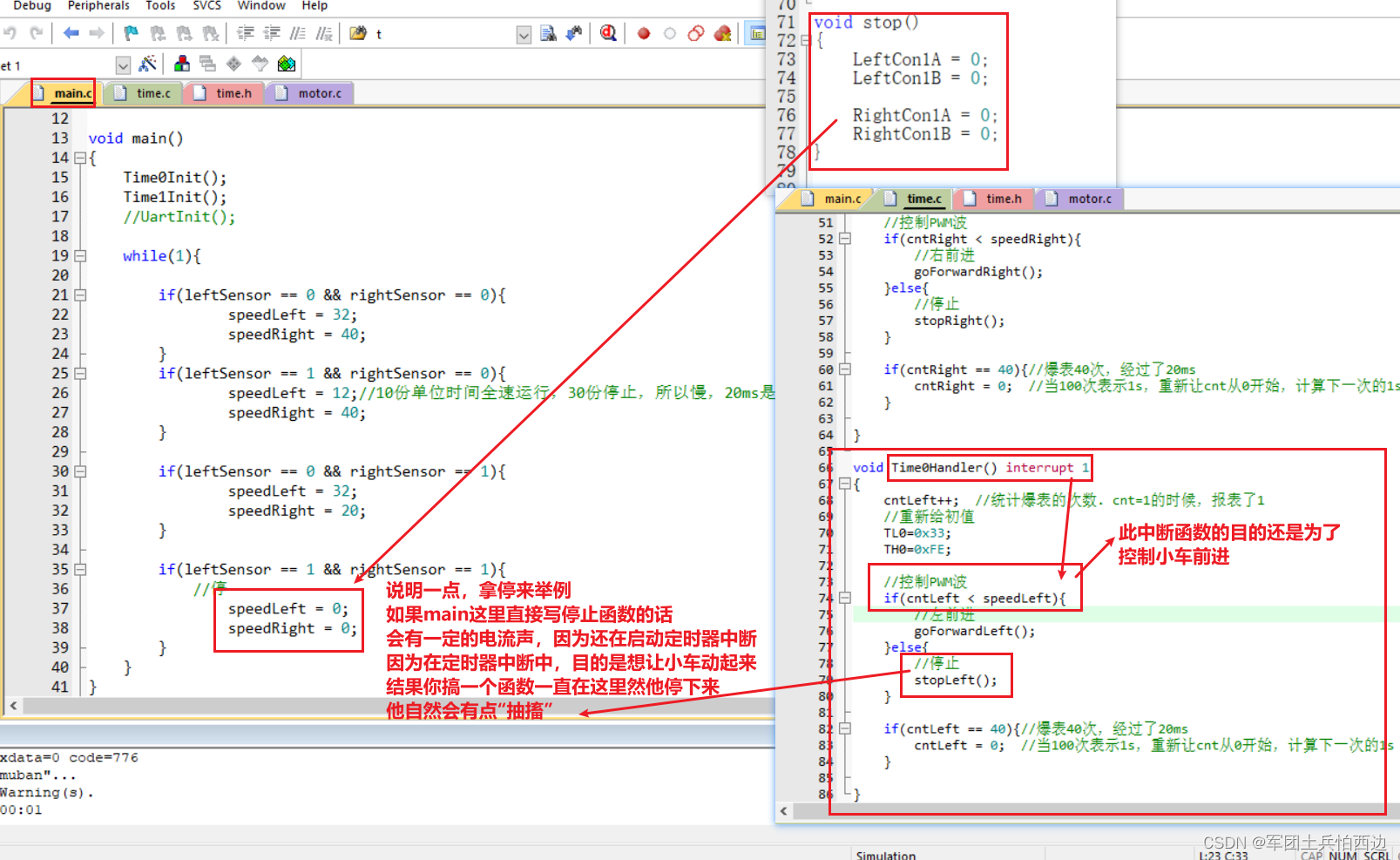
代码(能动,目的为了搞清楚循迹传感器的作用)
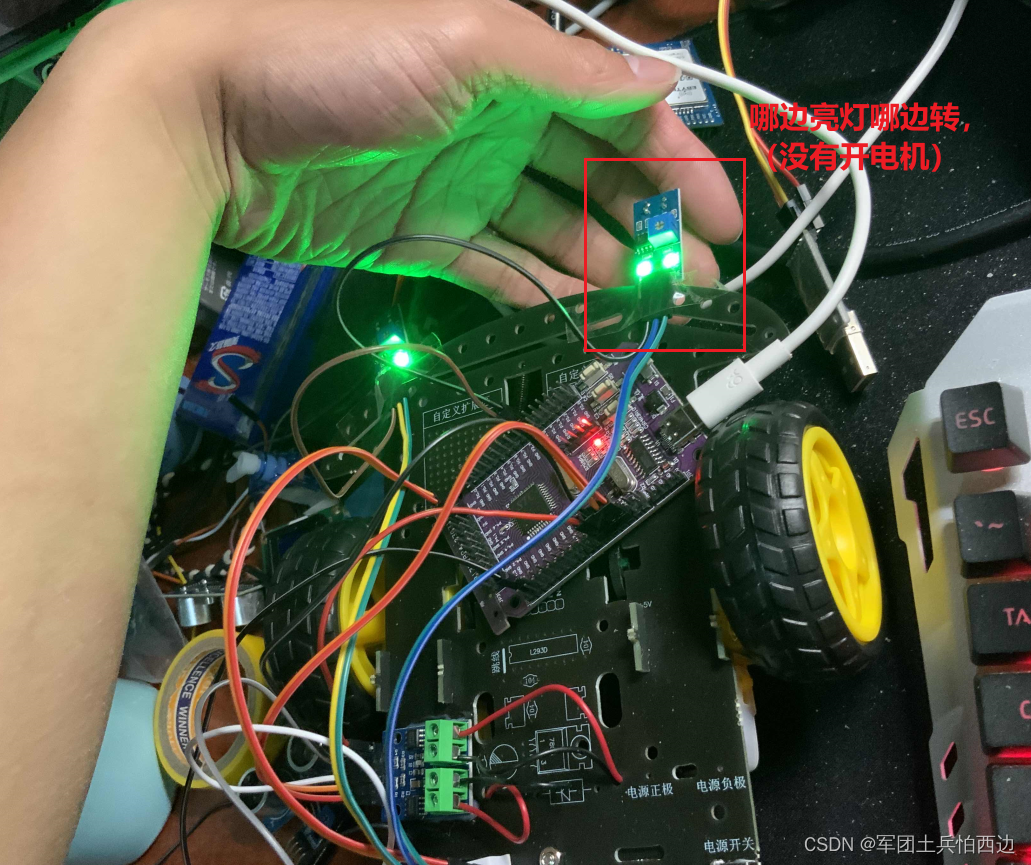
至此,其实可以循迹了,只是有点不太灵敏的亚子,因为转弯的时候是靠一个轮动一个不动带过去的。
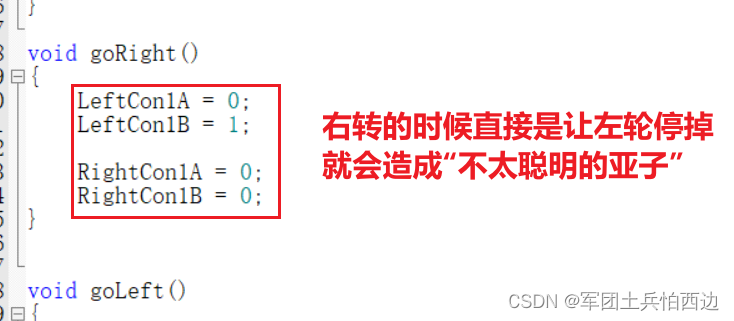
3.2.1 优化转弯
引入PWM调速,转弯的时候一边快一点一边慢一点
四、跟随小车
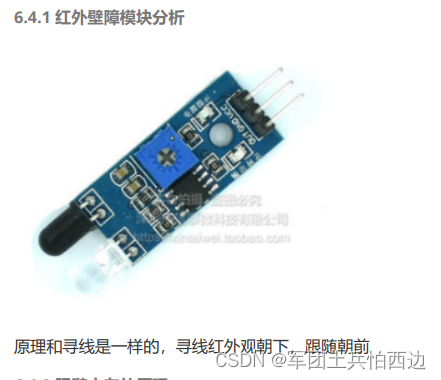
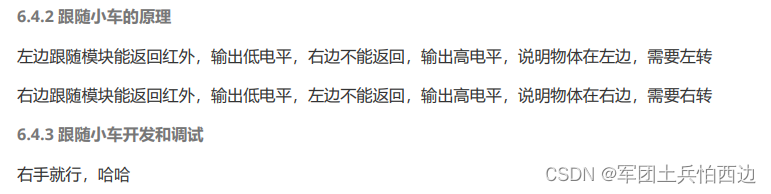
4.1 红外线模块原理 分析
4.2 小车跟随的原理分析
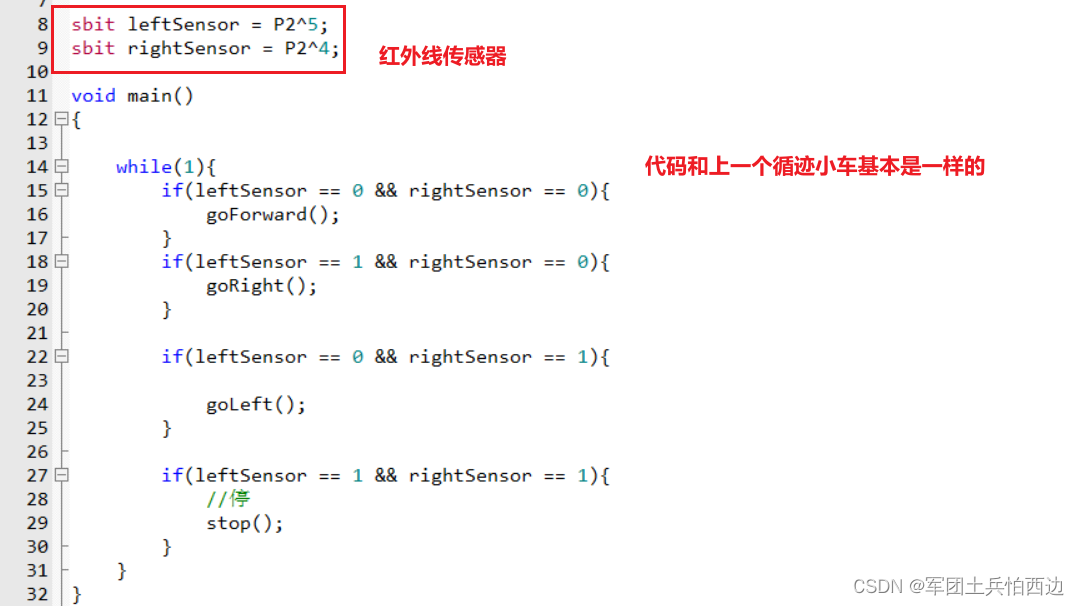
代码
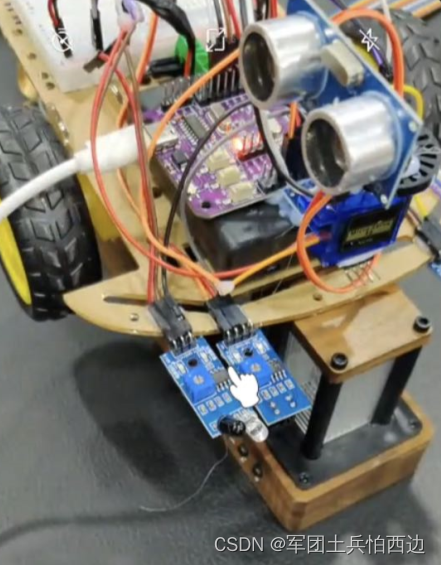
五、摇头测距小车
5.1 舵机和超声波的封装
超声波
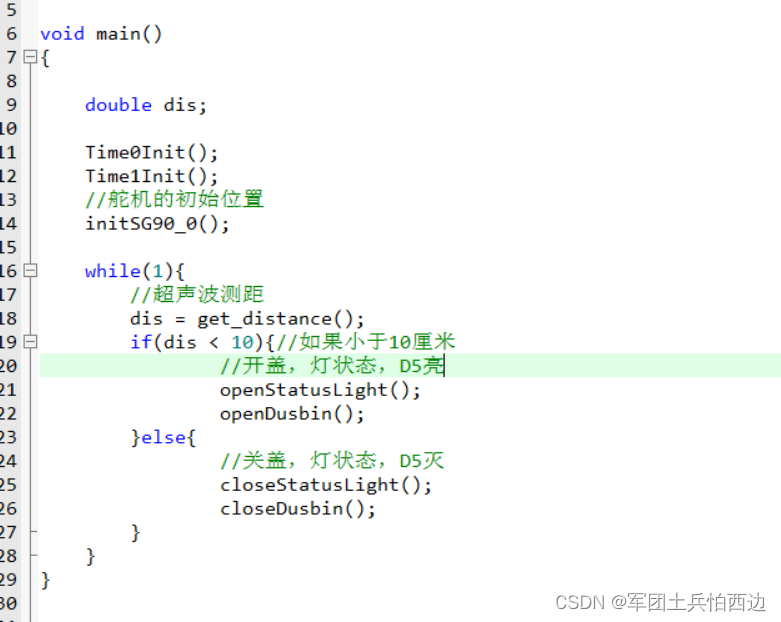
封装的以前的代码(垃圾桶感应开盖)

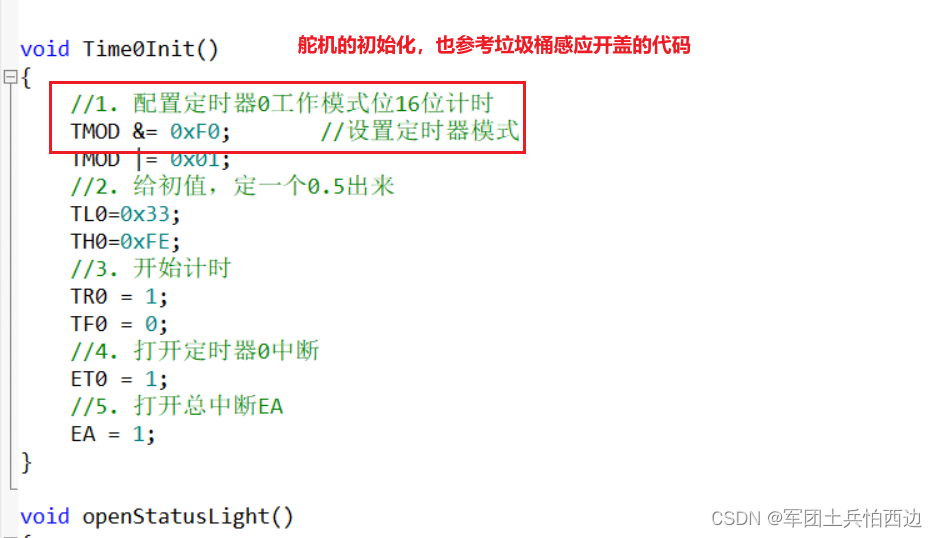
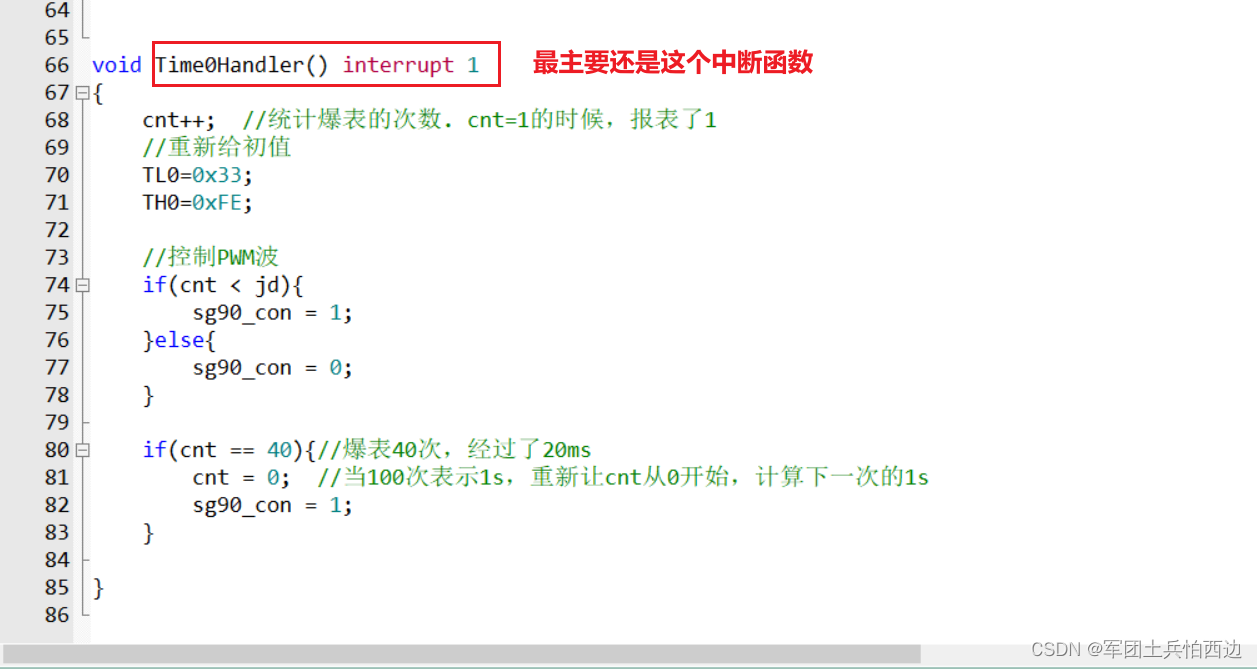
舵机
main
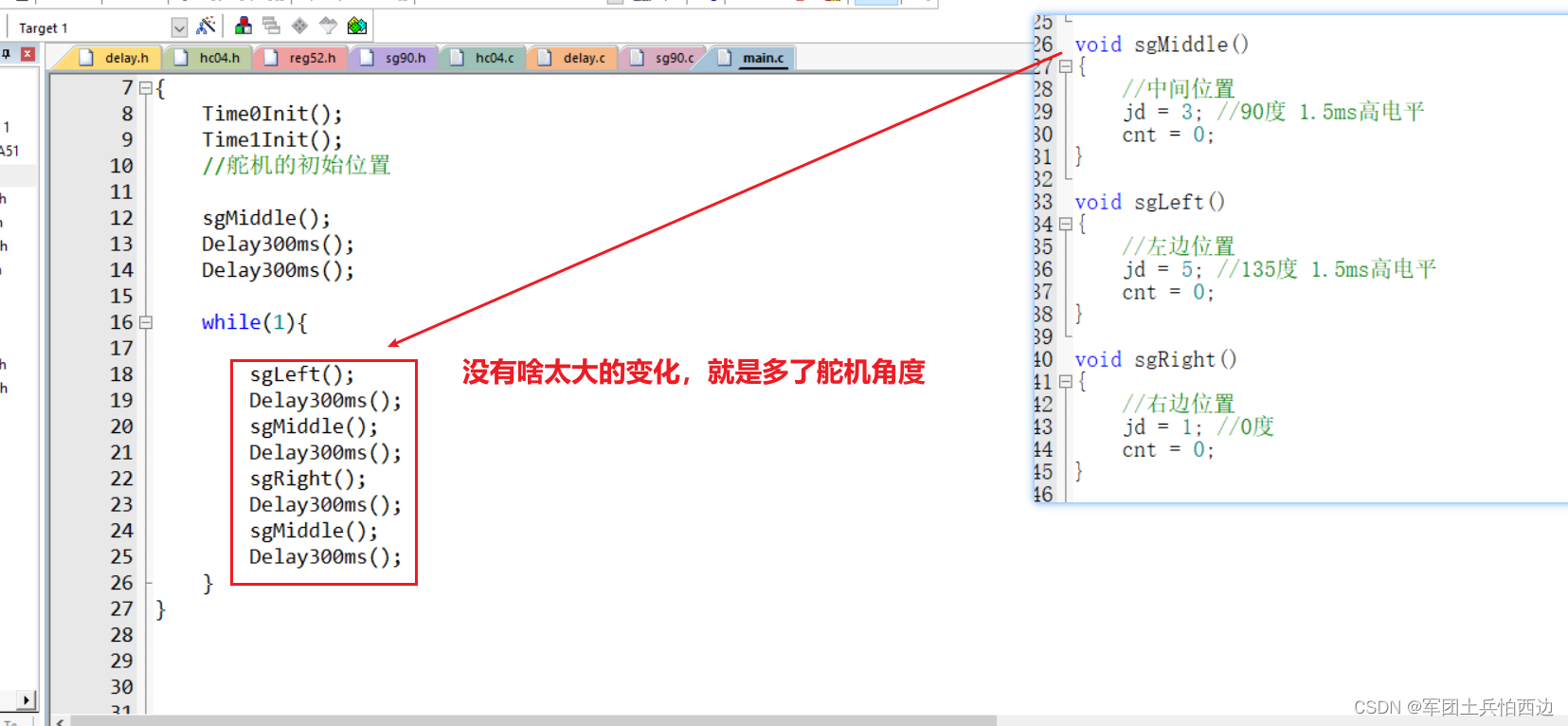
5.2实现小车的疯狂摇头(左转 中间 右转,共3个位置)
实现代码:此时是没有假如超声波测距的,只有疯狂摇头
5.3 测距摇头
实现代码,定义了方向
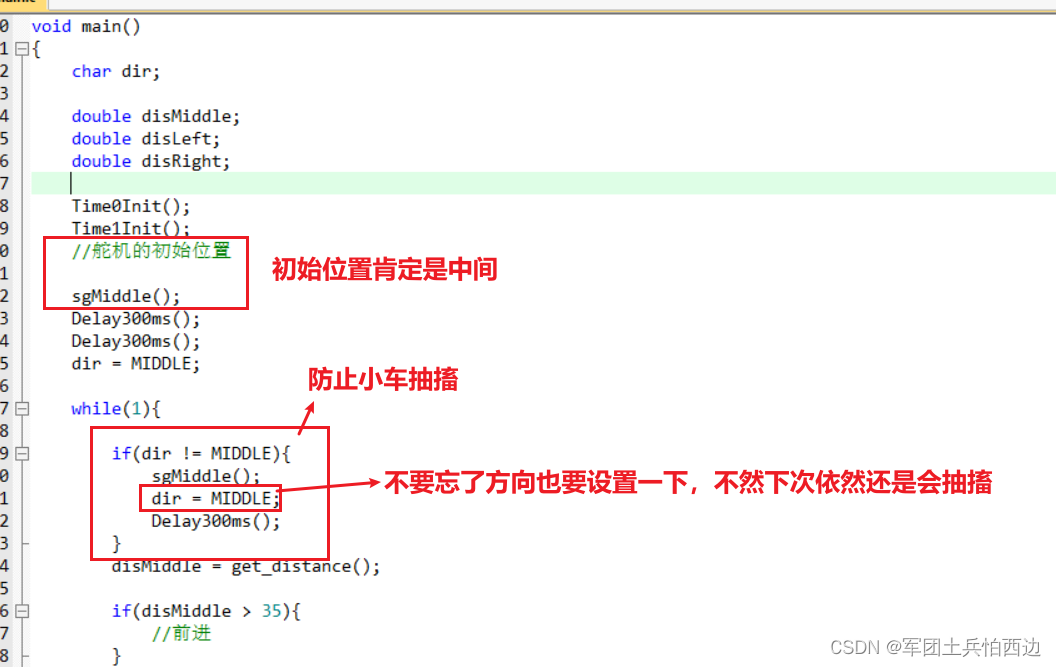
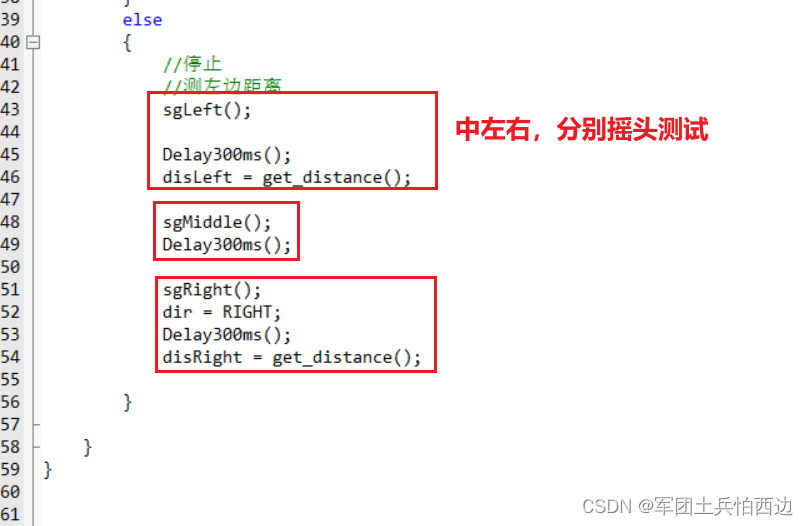
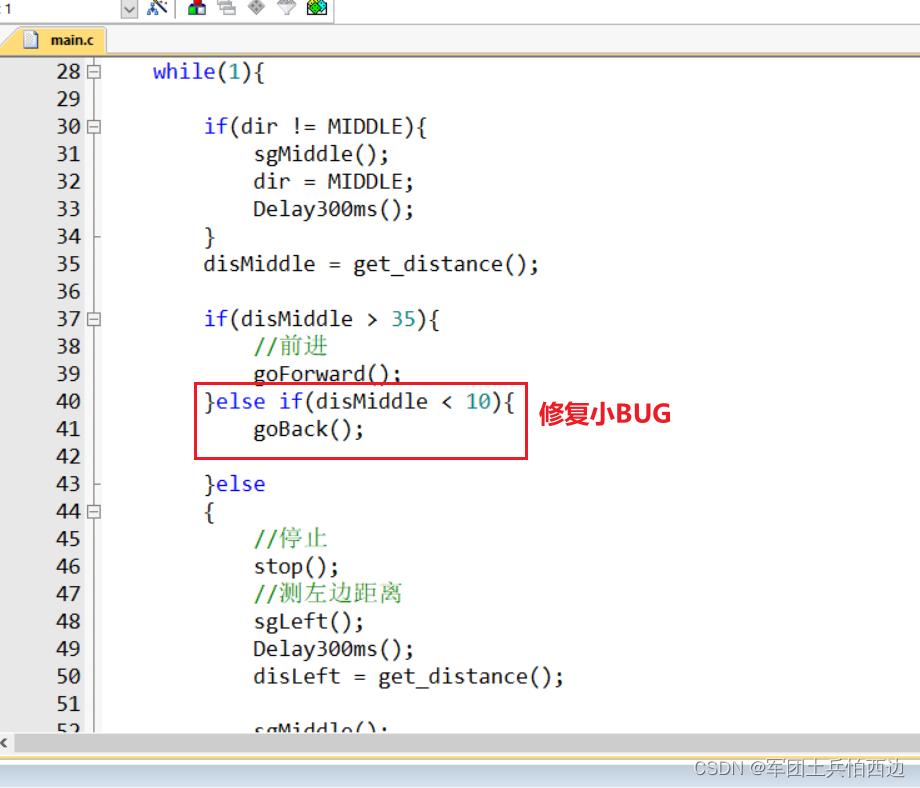
5.4 测距+电机驱动

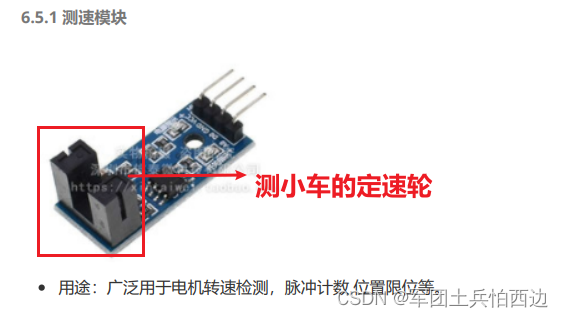
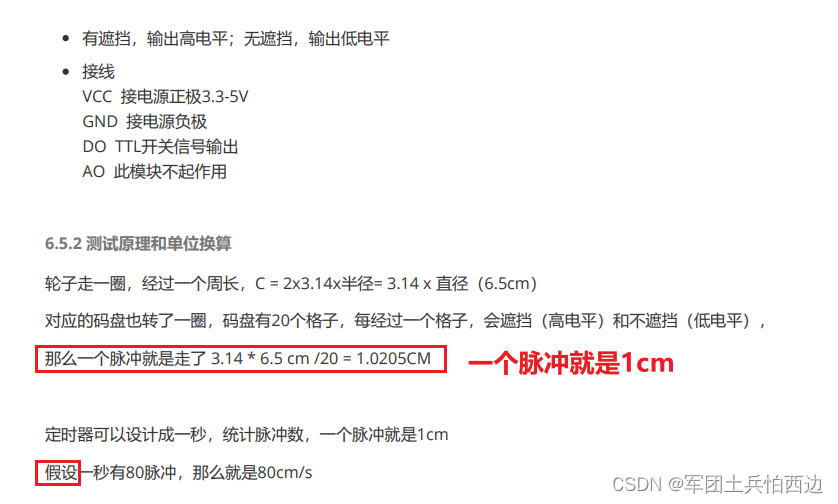
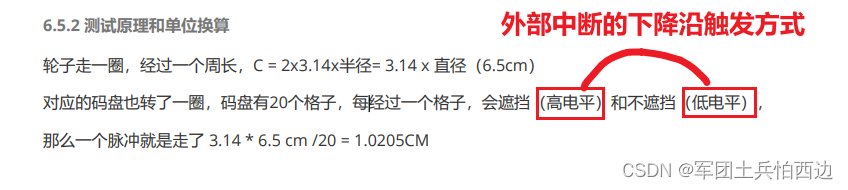
六、测速小车
6.1测速模块
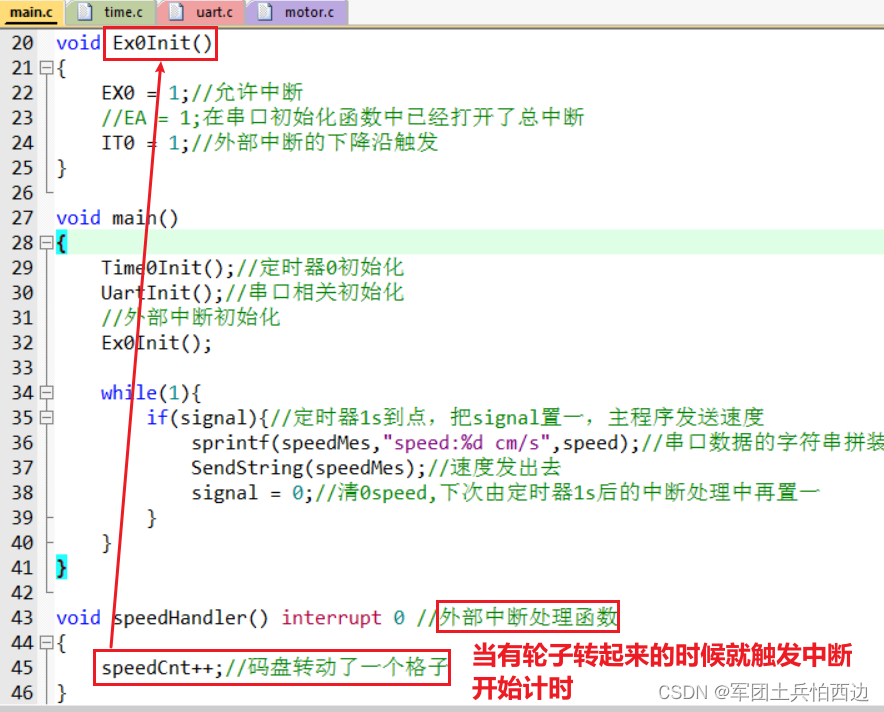
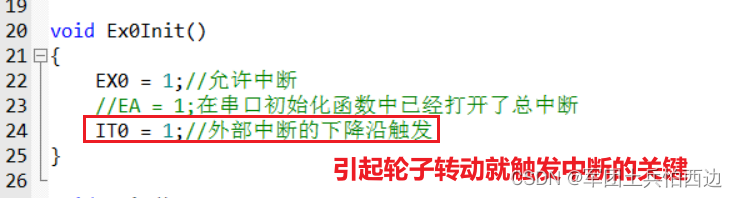
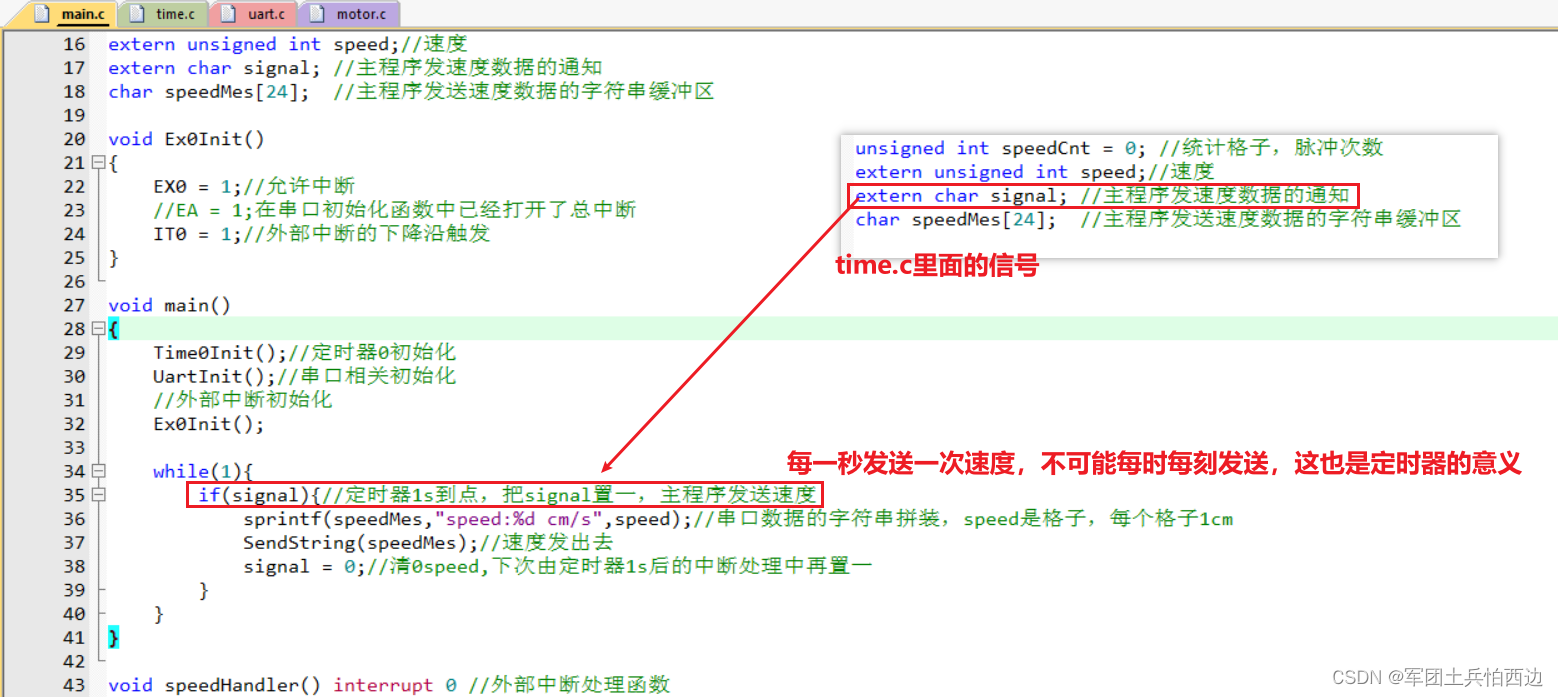
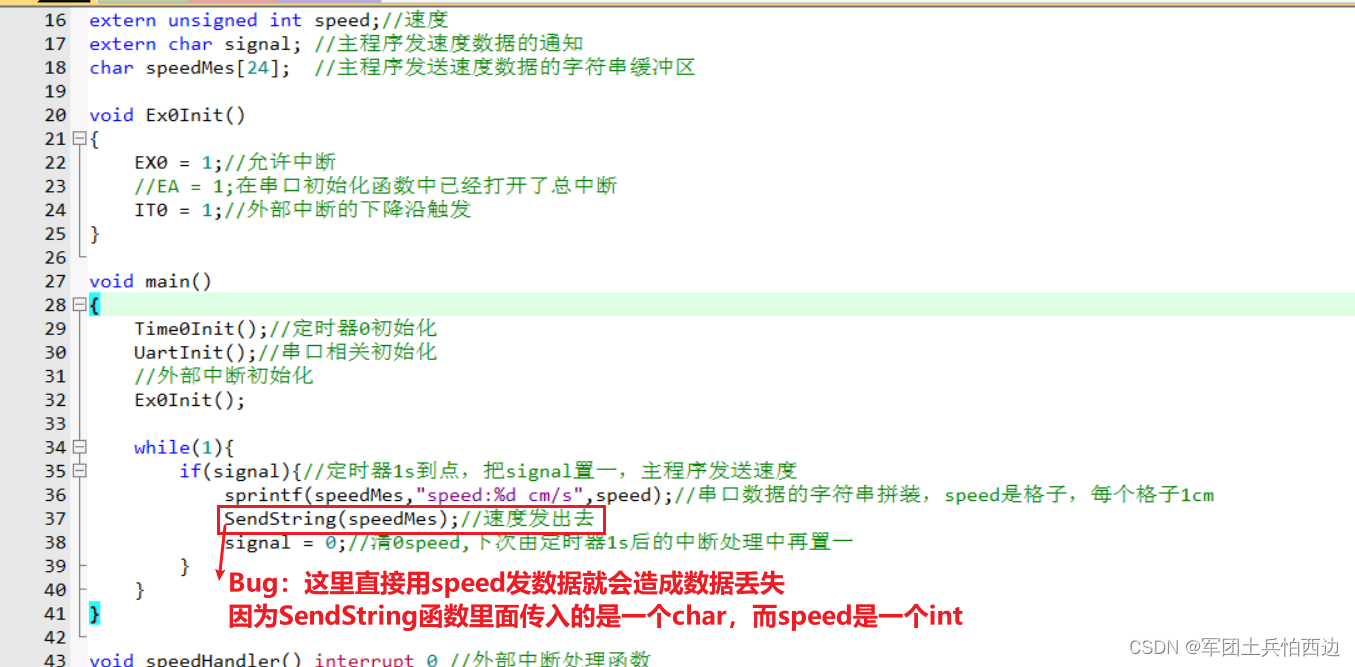
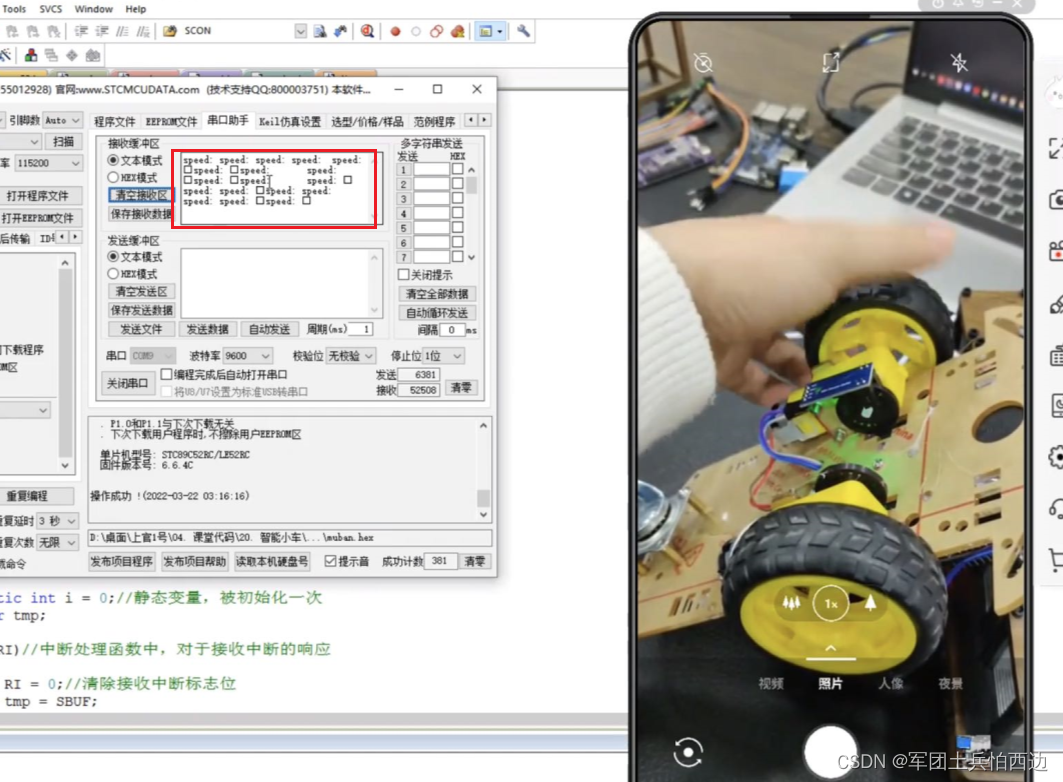
6.2代码编写(定时器,串口那部分的代码拿来改改)

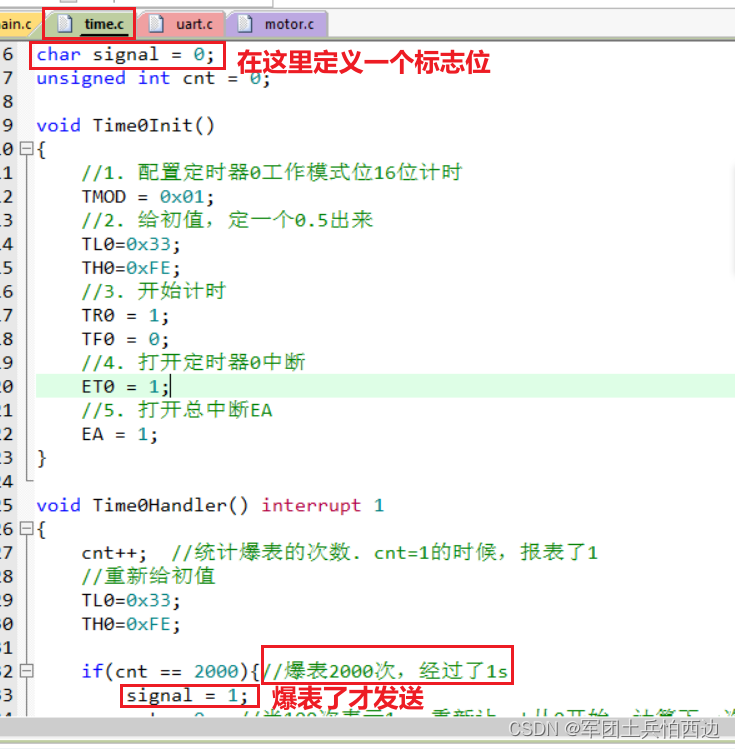
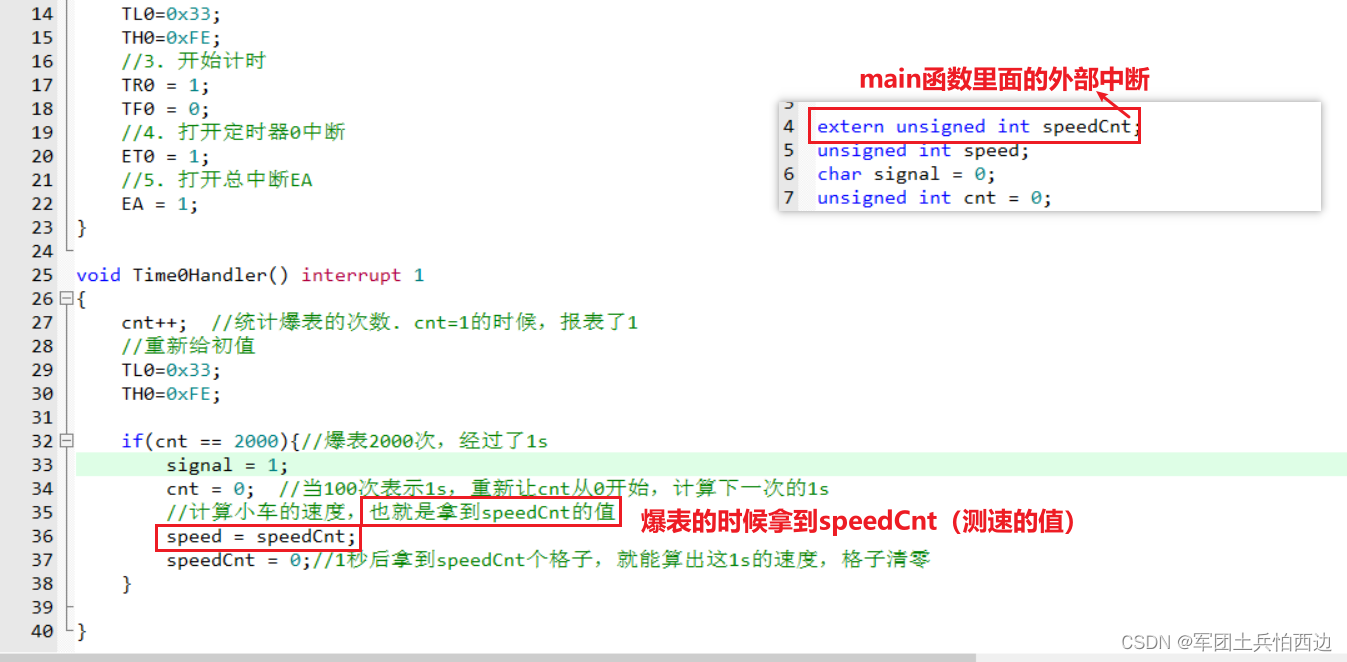
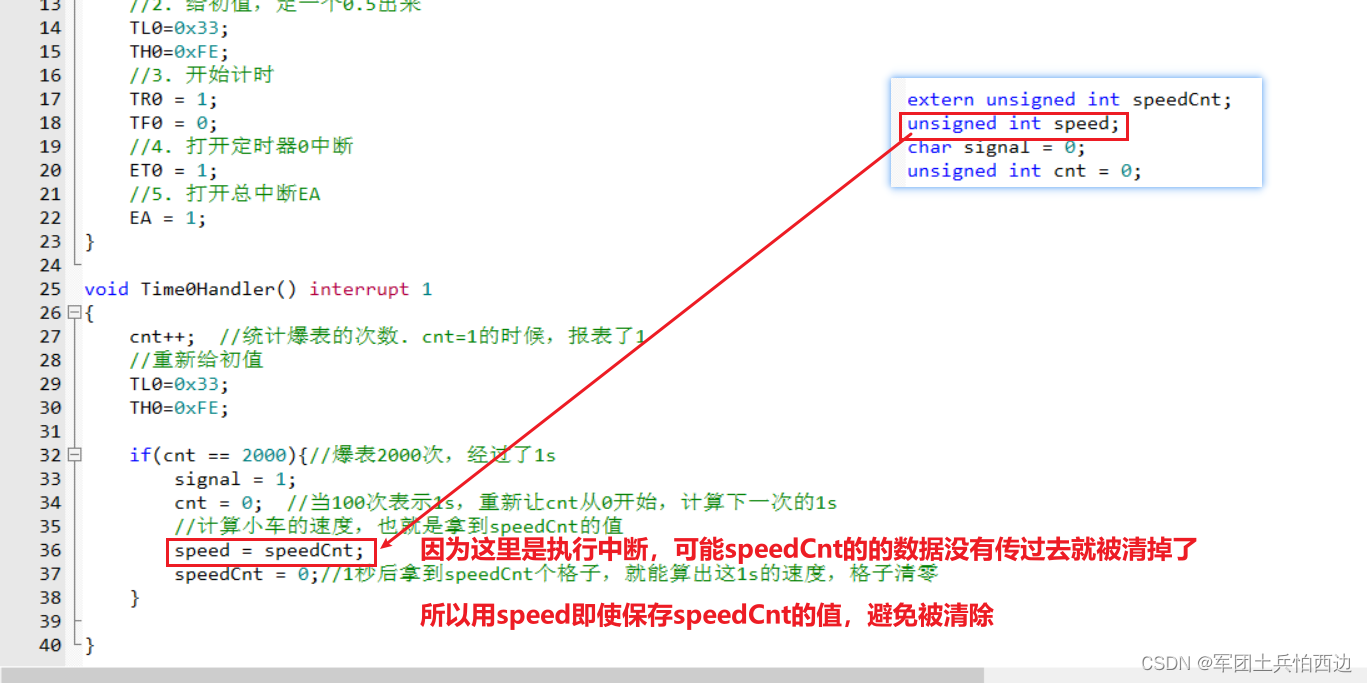
发现一个bug
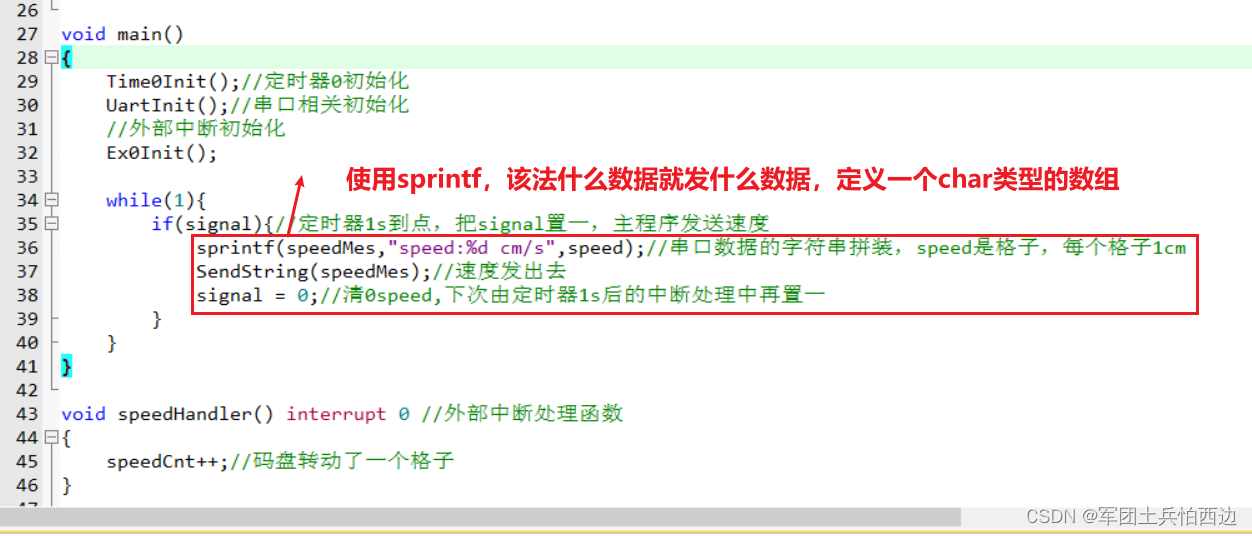
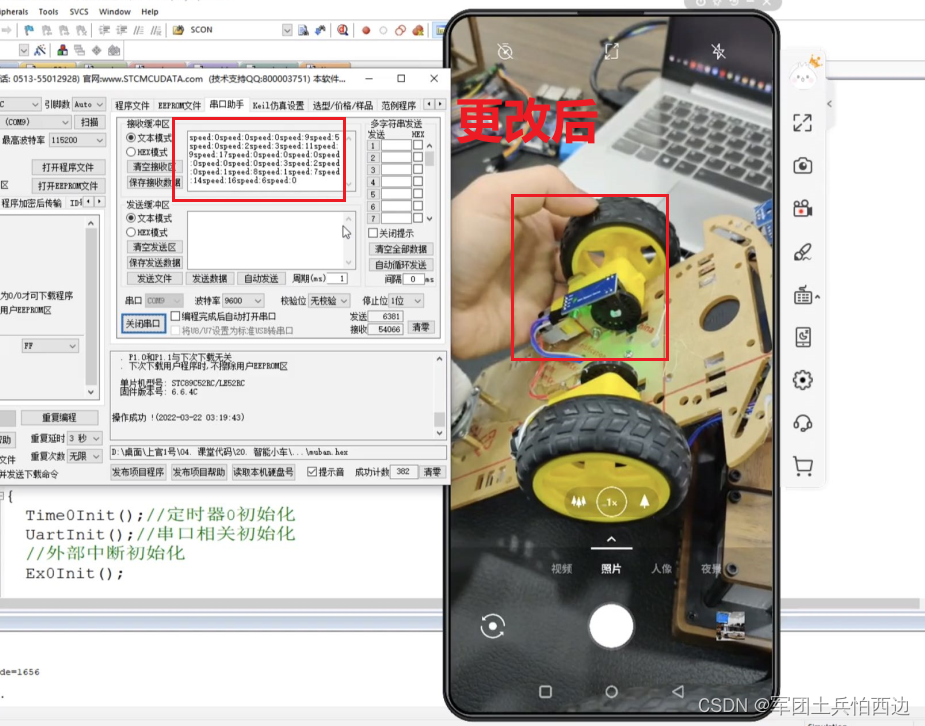
更正后的bug,数据类型更正
也可以通过串口来发送数据给小车进行前后左右移动
------------------------------------------------------------------------------------------------------------------------------
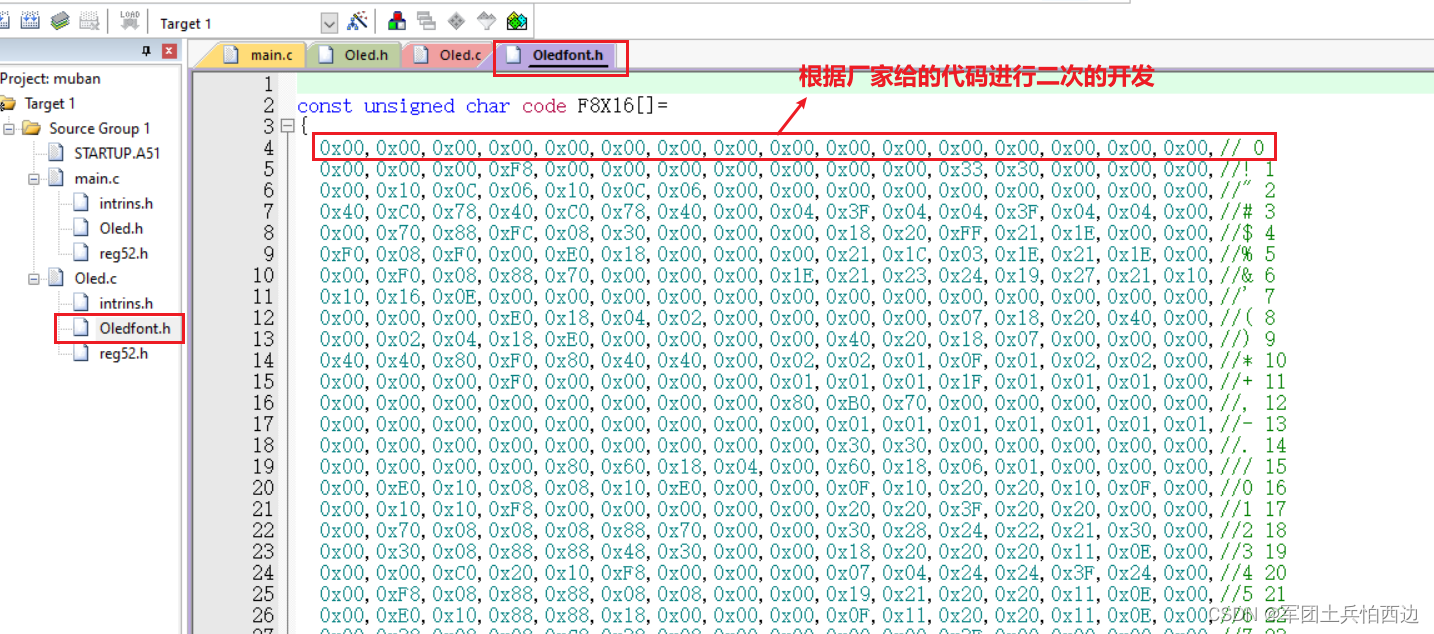
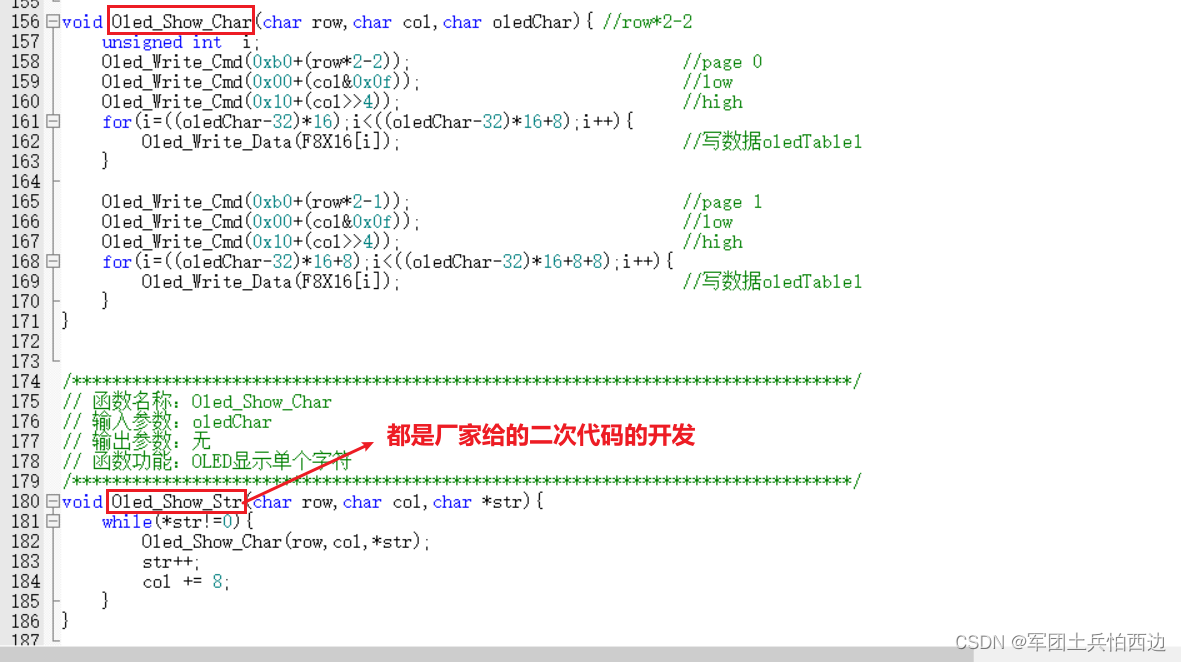
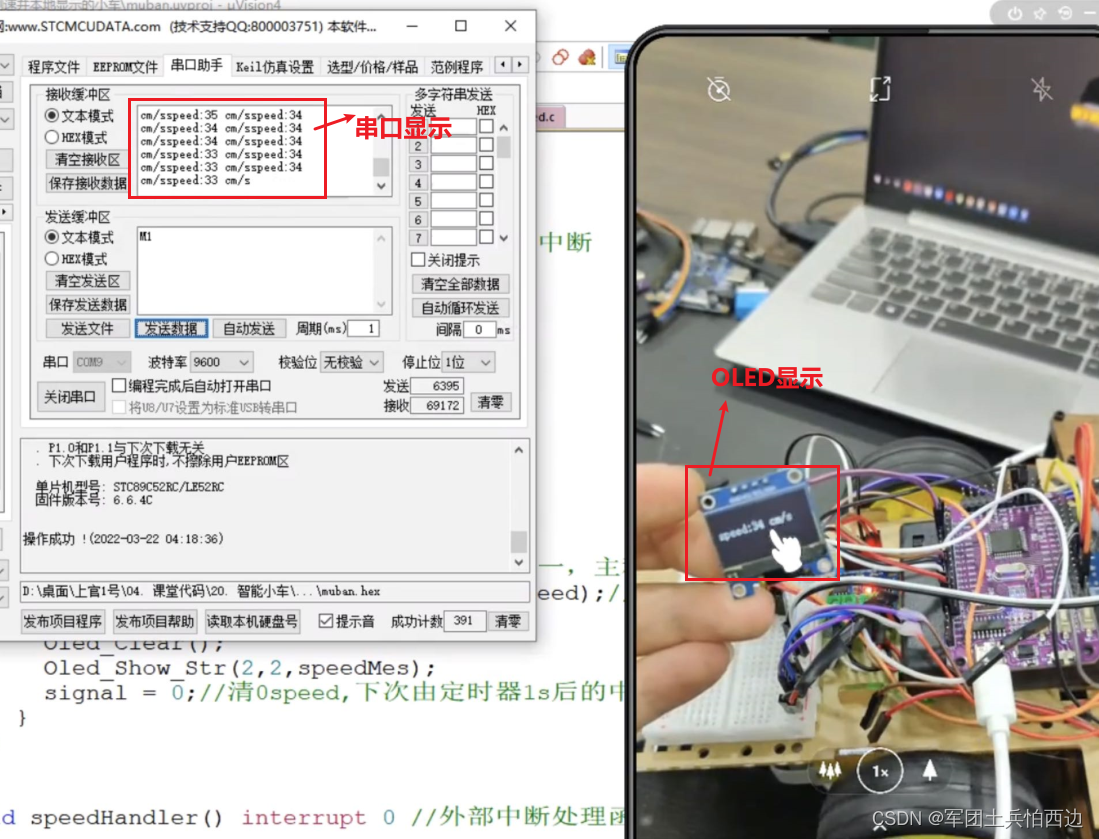
七、使用OLED、蓝牙显示速度
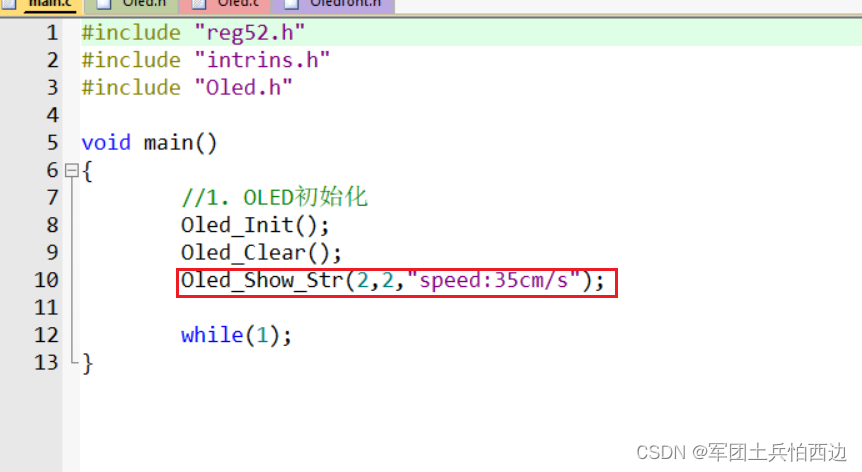
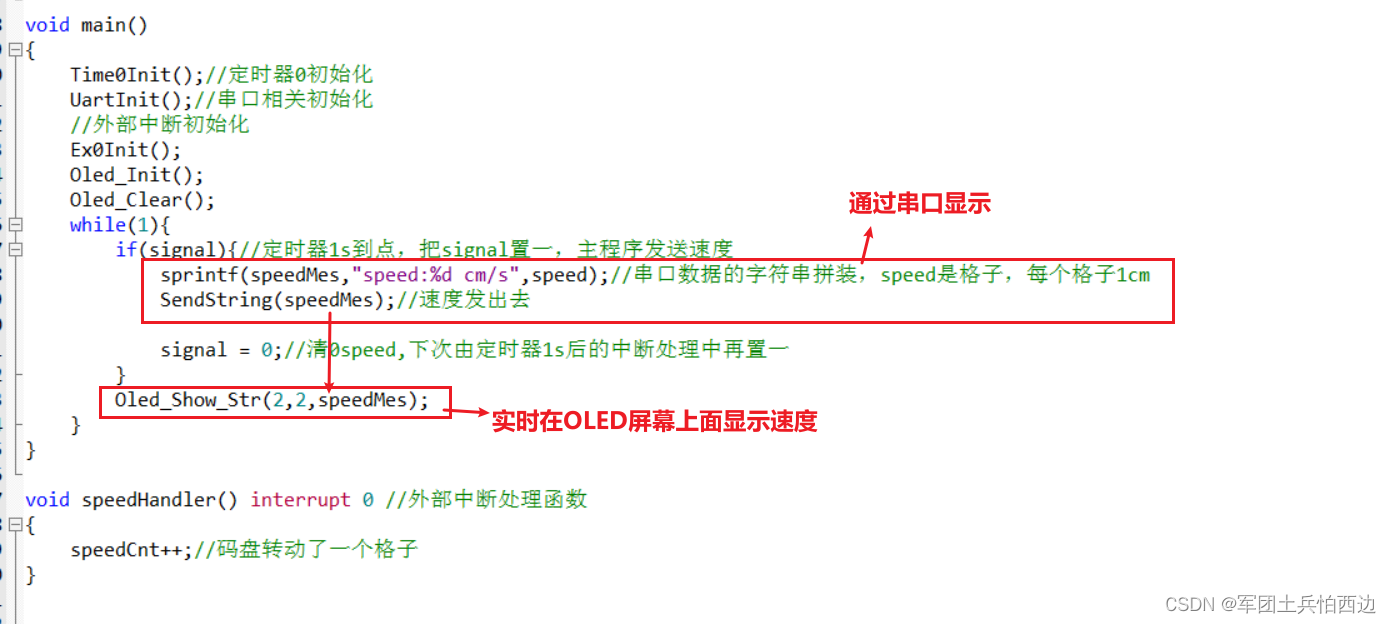
mian

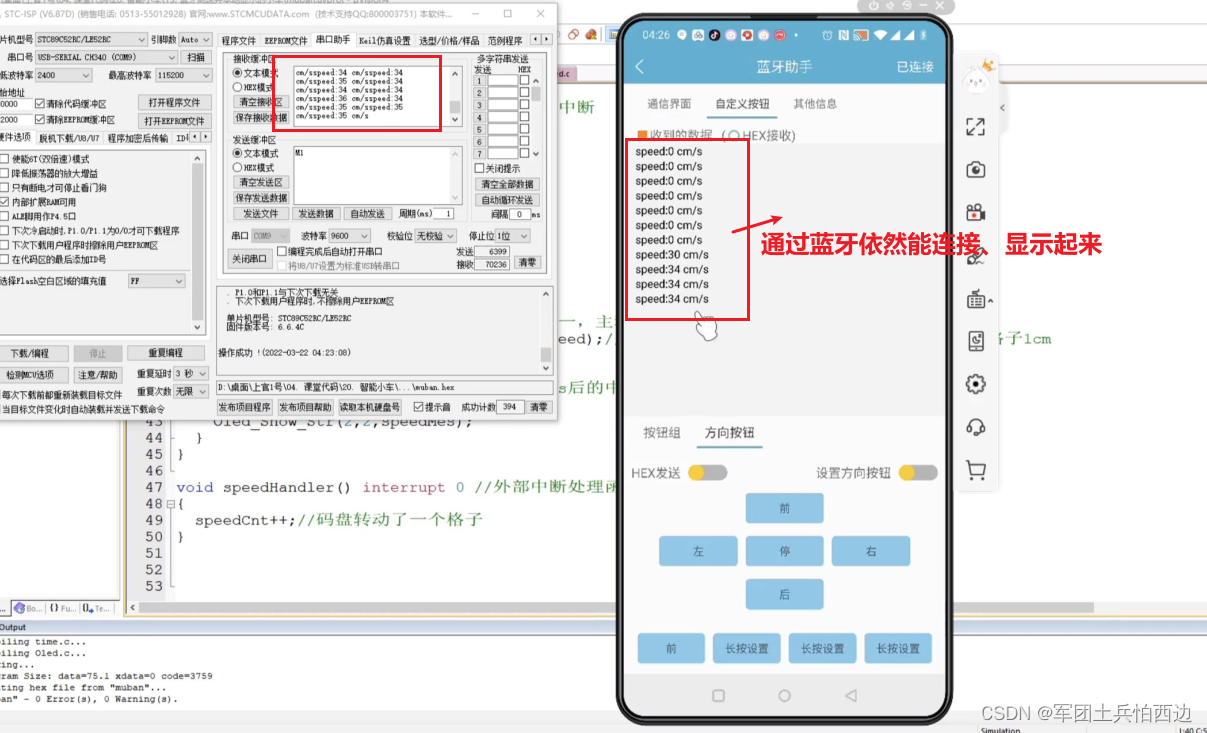
使用蓝牙显示速度
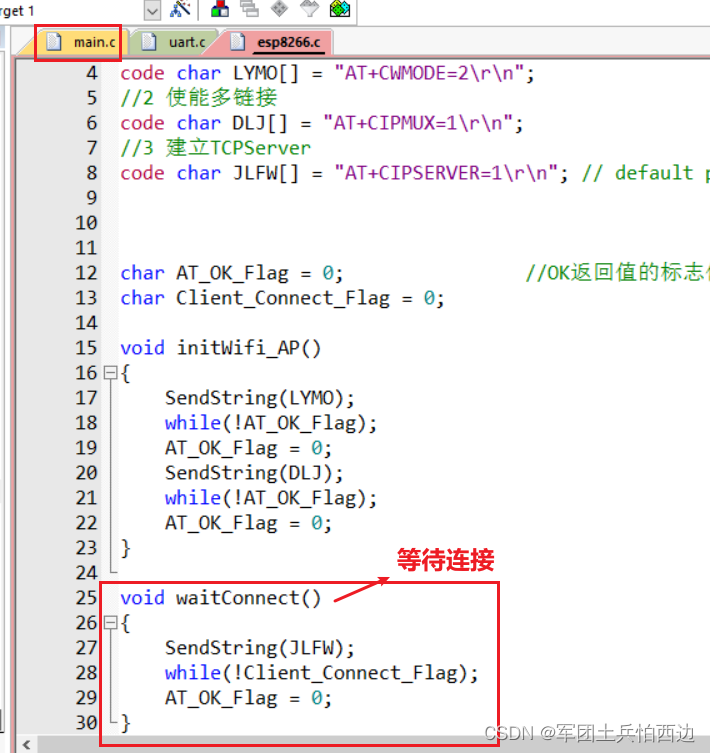
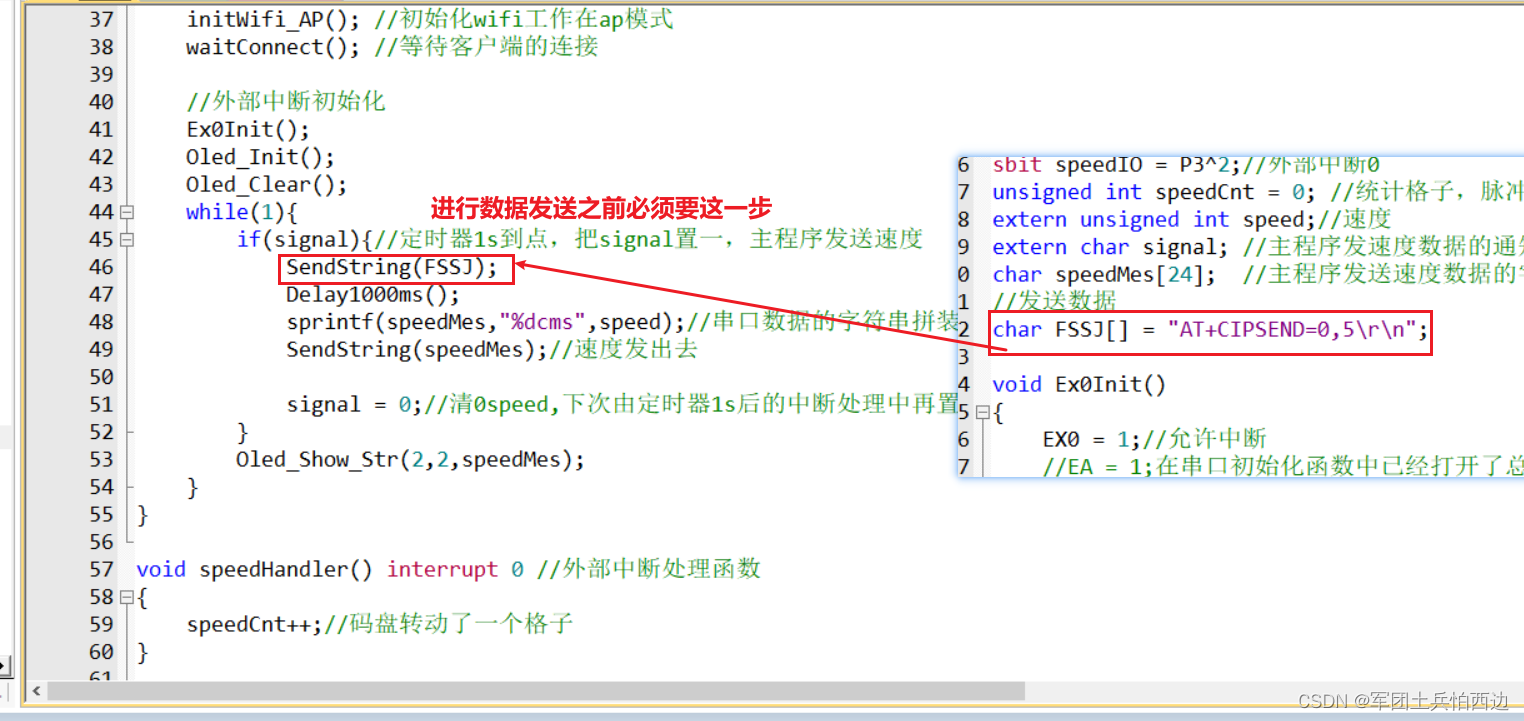
八、WIFI控制小车并发送速度
8.1配置AP模式(WIFI模块当作服务器使用)
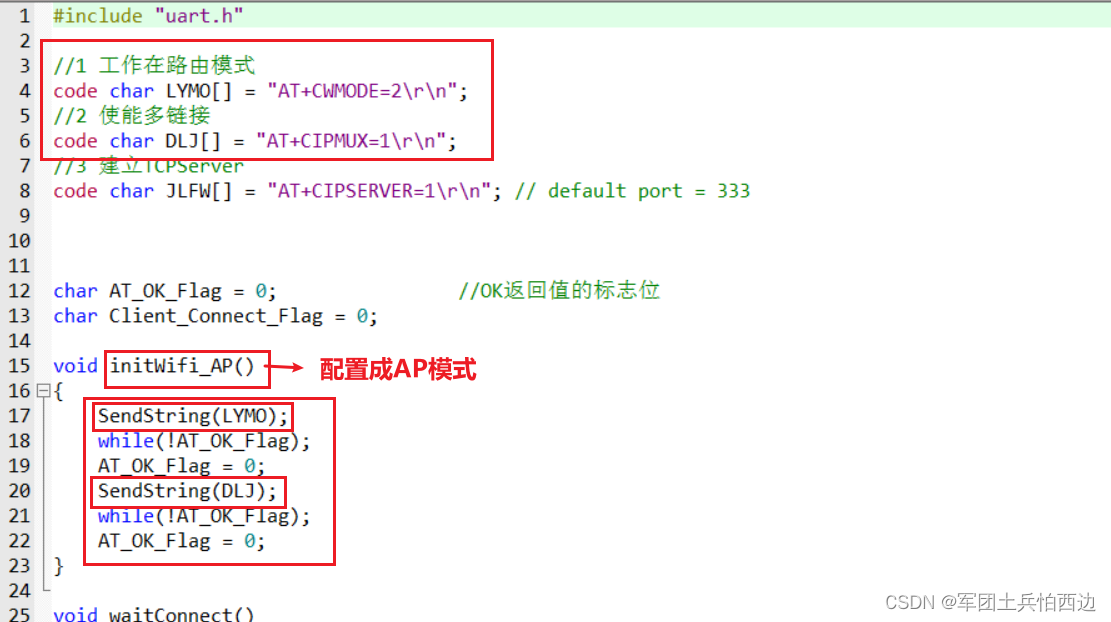
WIFI模块发送数据之前必须要进行的一步
还有一点要注意的是,因为发送的时候设置的是5个字节,所以“speed:%d cm/s”显示不完全
只需要发核心的数据“%d cm/s”即可

此接口是给手机APP准备的,通过网络连接,只不过现在是用网络调试助手来模拟
APP要实现的功能。手指按下才发送运动,松开就是停止(参考点动的代码)
---------------------------------------------------------------------------------------------------------------------------------
九、4G模块控制小车
(见资料代码,基于蓝牙部分修改,只比蓝牙多了一个穿透而已)
---------------------------------------------------------------------------------------------------------------------------------
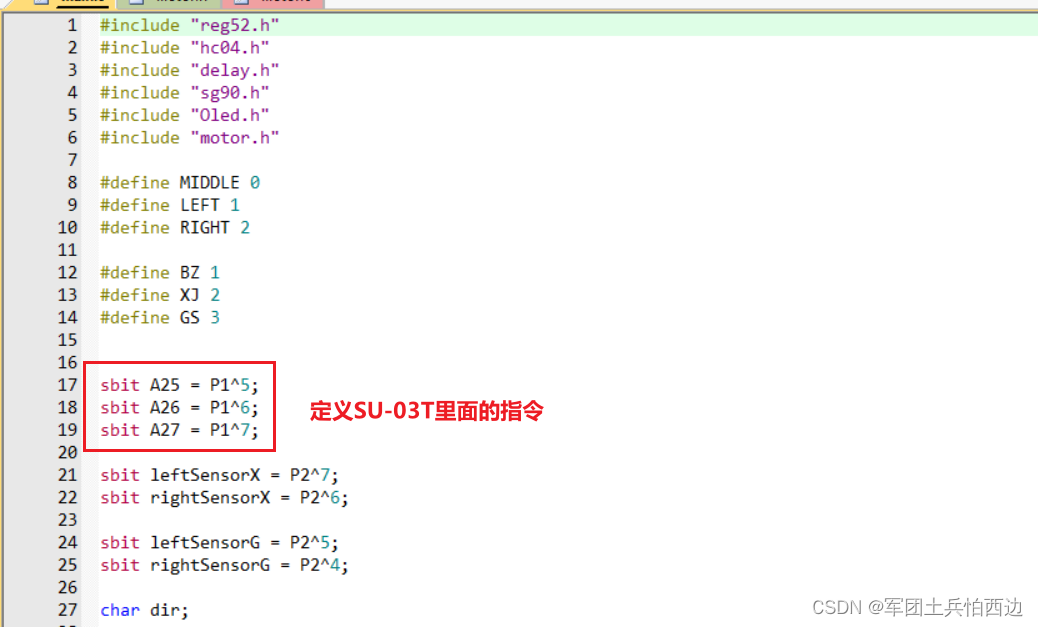
十、语音模块控制小车
10.1使用SU-03T配置语音指令



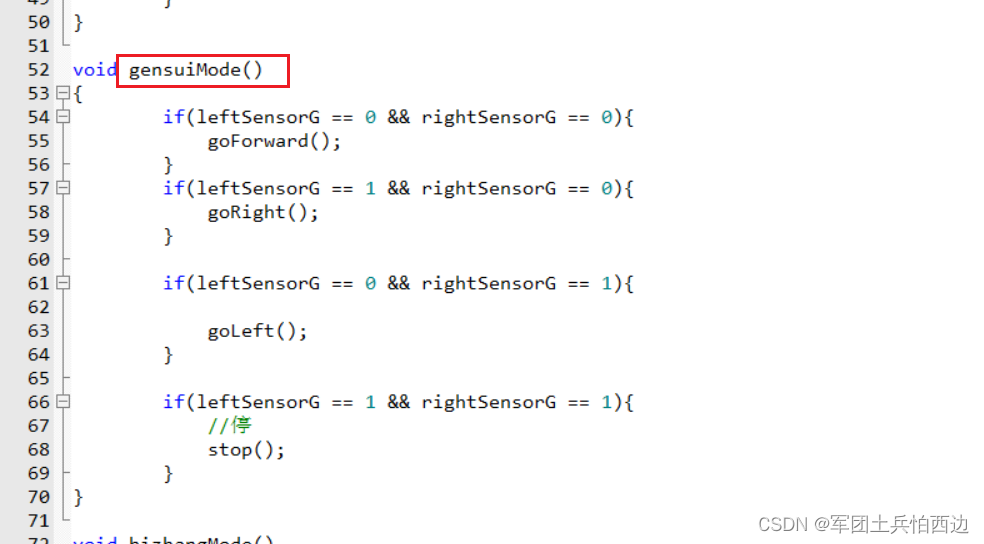
10.2训循迹模式(参考上面的代码)

10.3 跟随模式
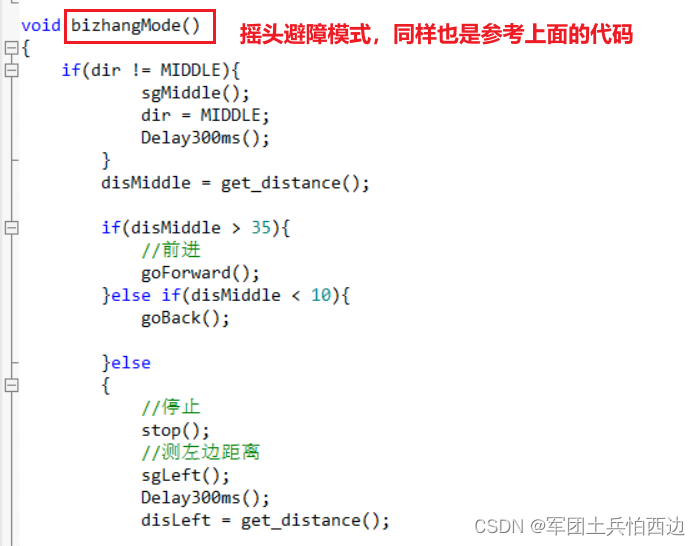
10.4避障模式

10.5定义语音模块里面的指令
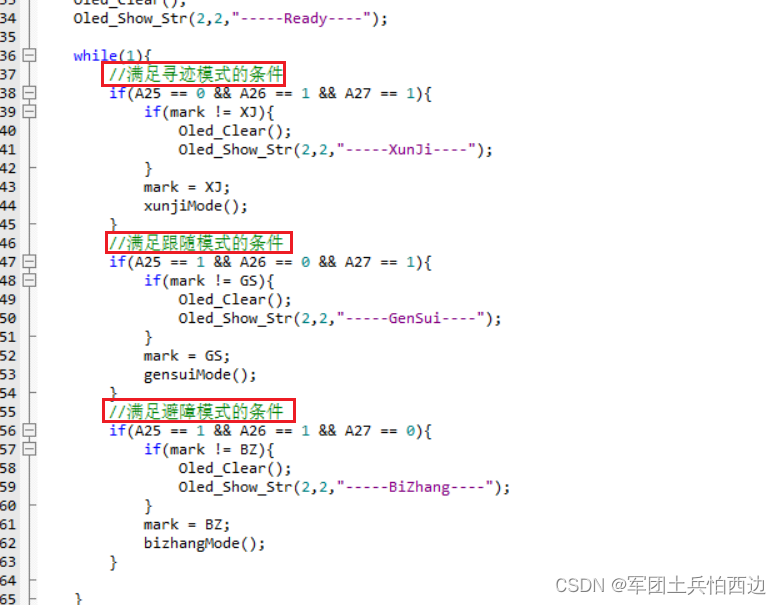
10.6 main函数里面实现各个功能
并且实现OLED显示当前的功能名称




![【洛谷 P8802】[蓝桥杯 2022 国 B] 出差 题解(带权无向图+单源最短路+Dijkstra算法+链式前向星+最小堆)](https://img-blog.csdnimg.cn/img_convert/d0ab4dd521491c3c534fac3b7163e9ec.jpeg)