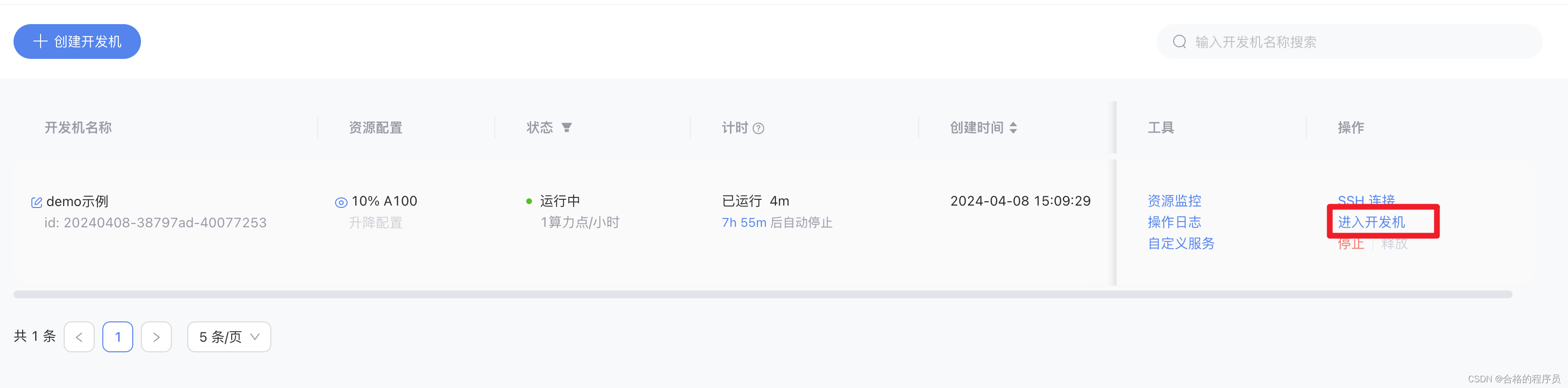
书生潽语趣味 demo
news2026/2/15 7:16:11



本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1589637.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

linux使用docker实现redis主从复制和哨兵模式
目录
1. 拉取redis镜像
2.使用可视化redis工具
3. 设置从redis
4.设置哨兵模式
5. 使用docker-compose快速创建 1. 拉取redis镜像
docker pull redis
默认拉取最新的镜像。
然后pull结束后使用docker images检查镜像: 然后docker run创建container容器
首先…
统计 | Levene检验
Levene检验是方差齐性检验的一种,即检验各组样本方差是否相等的一种统计方法.它通常用于方差分析(ANOVA)前的一个步骤。Levene检验的零假设是各组的方差相等。
Levene检验的数学步骤如下:
1. 数据准备: 假设我们有个…

Scikit-learn 快速入门篇
Sklearn 简介
scikit-learn (sklearn) 是 Python 中用于机器学习的最流行的库之一。它提供了一系列有效的算法和工具,涵盖各种机器学习任务,包括:
分类回归聚类降维模型选择数据预处理
Sklearn 六大模块
分类:预测离散类别 算…

腾讯云向量数据库-RAG介绍
1.说明
RAG结合LLM(通用大预言模型)构件基于私有文档、专业领域知识、实时信息的charbot。
2.RAG的主要步骤
知识切片成chunk向量化chunk入库query检索知识chunk构件prompts调用llm生成回答
3.优势
快速构件demo快速理解rag社区支持
4.痛点
投入大效果差调优难
5.RAG应…
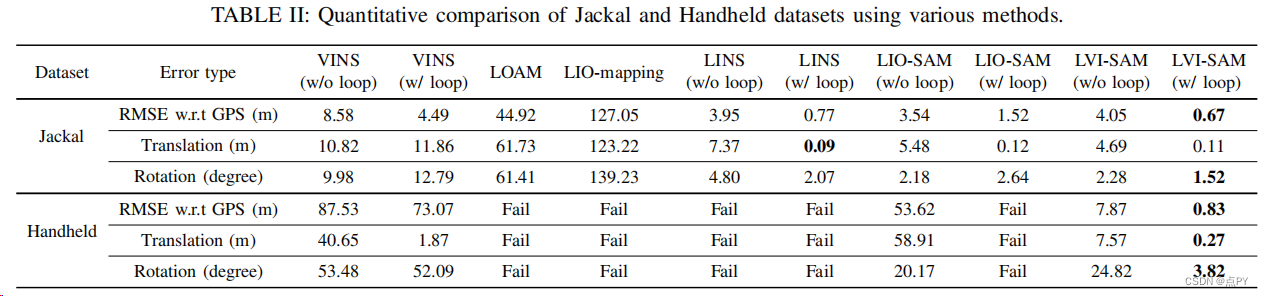
激光slam论文汇总
文章目录 2014LOAM: Lidar Odometry and Mapping in Real-time 2018LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain 2020LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping 2021LVI-SAM: Tightly-co…
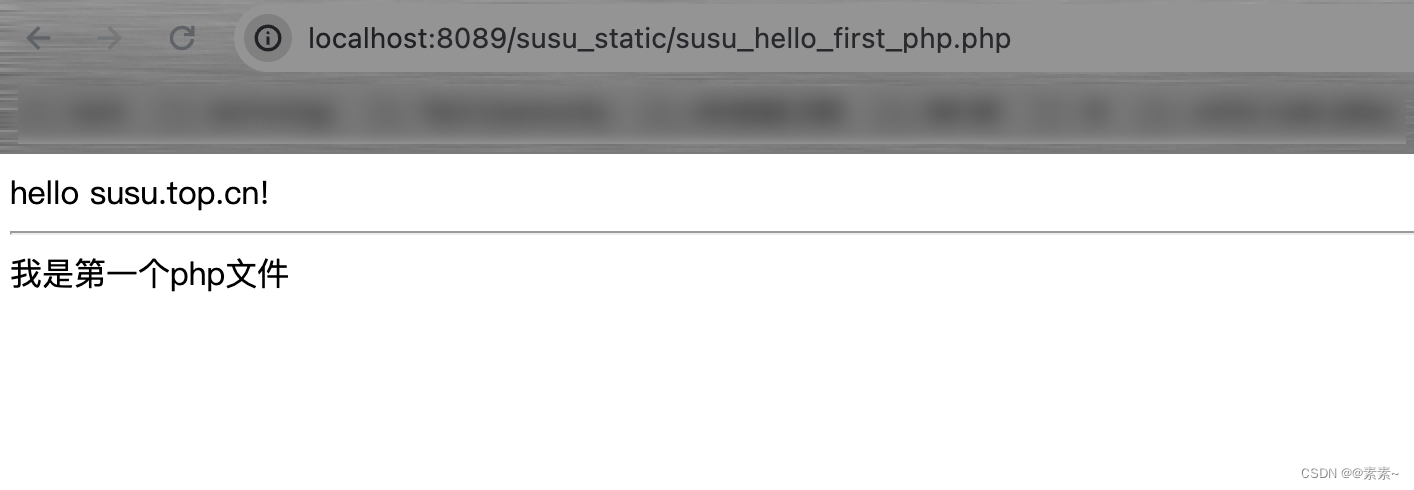
PHP01——php快速入门 之 使用phpstudy快速搭建PHP环境
PHP01——php快速入门 之 使用phpstudy快速搭建PHP环境 0. 前言1. 下载小皮面板1.1 下载phpstudy(小皮面板)1.2 启动、简单访问1.2.1 启动Apache1.2.2 访问1.2.3 访问自定义文件或页面 2. 创建网站2.1 创建网站2.2 可能遇到的问题2.2.1 hosts权限问题&am…

靠谱的香港服务器有哪些(看过才后悔)_避坑血泪史
最受欢迎的外贸建站服务器就是香港服务器,可是很多人还不知道如何辨别香港服务器商家是否靠谱。
小编曾经也是建站新手,以前也碰到过很多不靠谱的服务器商家,各种踩坑,可以说都是用钱堆出来的经验。在这里小编给大家总结下&#…
ADG数据库迁移方案
一、环境说明 源库 目标库 IP 192.168.37.201 192.168.37.202 系统版本 RedHat 7.9 RedHat 7.9 数据库版本 19.3.0.0.0 19.3.0.0.0 SID pri std hostname primary standby 数据量 整个库
说明:源库已经创建数据库实例,目标库只有数据库软件。…
蓝桥杯— —小明的背包问题
小明的背包问题
小明的背包1 — — (01背包)
友情链接:小明的背包1
题目: 输入样例: 5 20
1 6
2 5
3 8
5 15
3 3 输出样例: 37思路:
对于01背包问题,其中一个重要的条件是每一种物品只有一个…
git查看单独某一个文件的历史修改记录
git查看单独某一个文件的历史修改记录 git log -p 文件具体路径 注意,Windows下默认文件路径分隔符是 \,在git bash 里面需要改成 /。 git基于change代码修改与提交_git change-CSDN博客文章浏览阅读361次。git cherry-pick:复制多个提交comm…
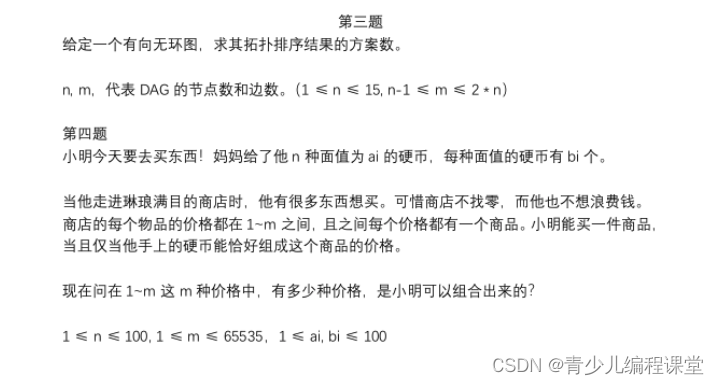
2023全国青少年信息素养大赛总决赛C++小学组真题
2023 全国青少年信息素养大赛总决赛C小学组真题
第一题
给定一个五位数x,你需要重复做以下操作: 把数的各个数位进行由大到小排序和由小到大排序,得到的最大值和最小值,进行求差后作为新的x。 可以证明,在经过有限次操作后&…
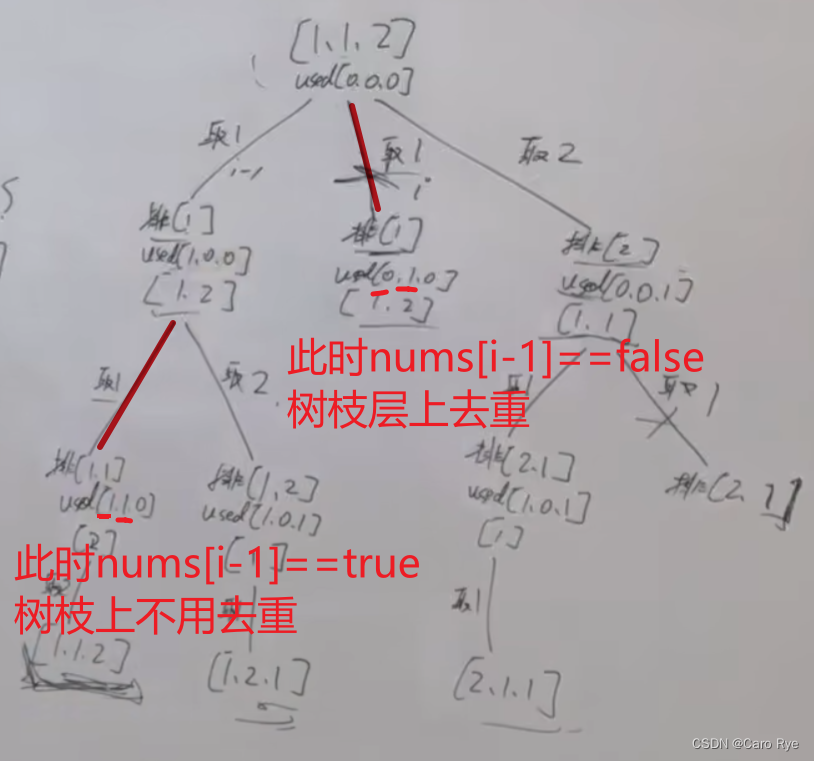
代码随想录算法训练营33期 第三十一天(补29) | 491. 非递减子序列、46. 全排列、47. 全排列 II
491. 非递减子序列
class Solution {
public:vector<int> path;vector<vector<int>> result;void BackTracking(vector<int>& nums, int index){if(path.size()>2){result.push_back(path);}unordered_set<int> usedSet;for (int iindex…
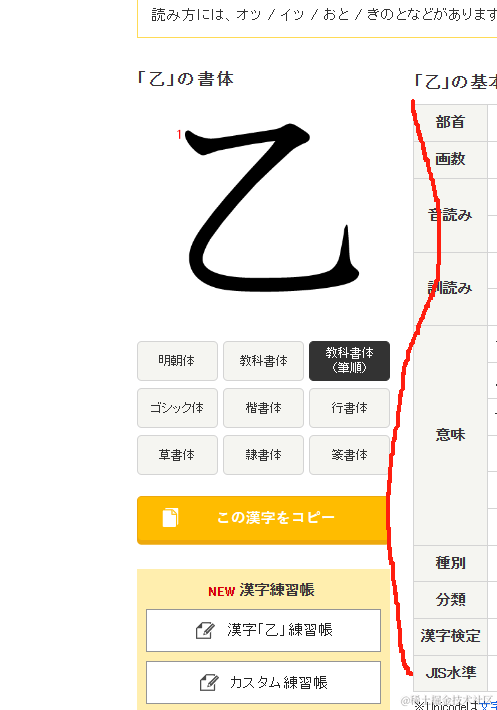
爬取日本常用汉字秘籍
前言
昨天投简历时遇到了这样的一个笔试。本以为会是数据结构算法之类的没想到直接发了一个word直接提需求,感觉挺有意思就写了这篇文章,感兴趣的朋友可以看看。 1. 网页内容解析
首先,我们通过请求网页获取到日本常用汉字的链接列表。然后…

HarmonyOS开发学习:【DevEco Device Tool 安装配置(问题全解)】
本文介绍如何在Windows主机上安装DevEco Device Tool工具。
坑点总结:
国内部分网络环境下,安装npm包可能会很慢或者超时,推荐使用国内npm源(如淘宝源、华为源等);serialport这个npm包安装的过程中需要编…
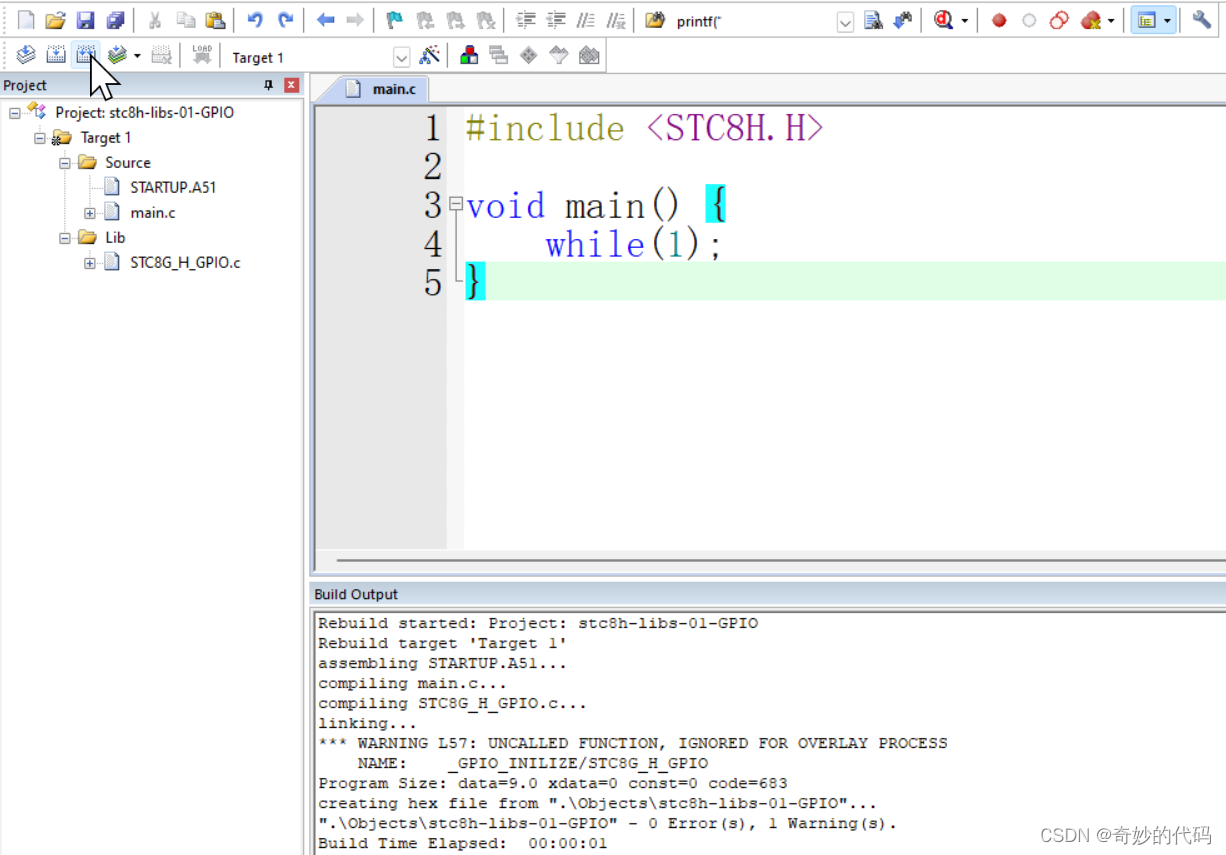
STC8H8K64U 库函数学习笔记 —— GPIO 点灯
STC8H8K64U 库函数学习笔记 —— GPIO 点灯 环境说明: 芯片:STC8H8K64U 软件: KeilC51 μVersion V5.38.00STCAI-ISP (V6.94) 不得不说,Keil 是我用过的 IDE 中,最让人头疼的事情,写代码就像是在记事本里编…
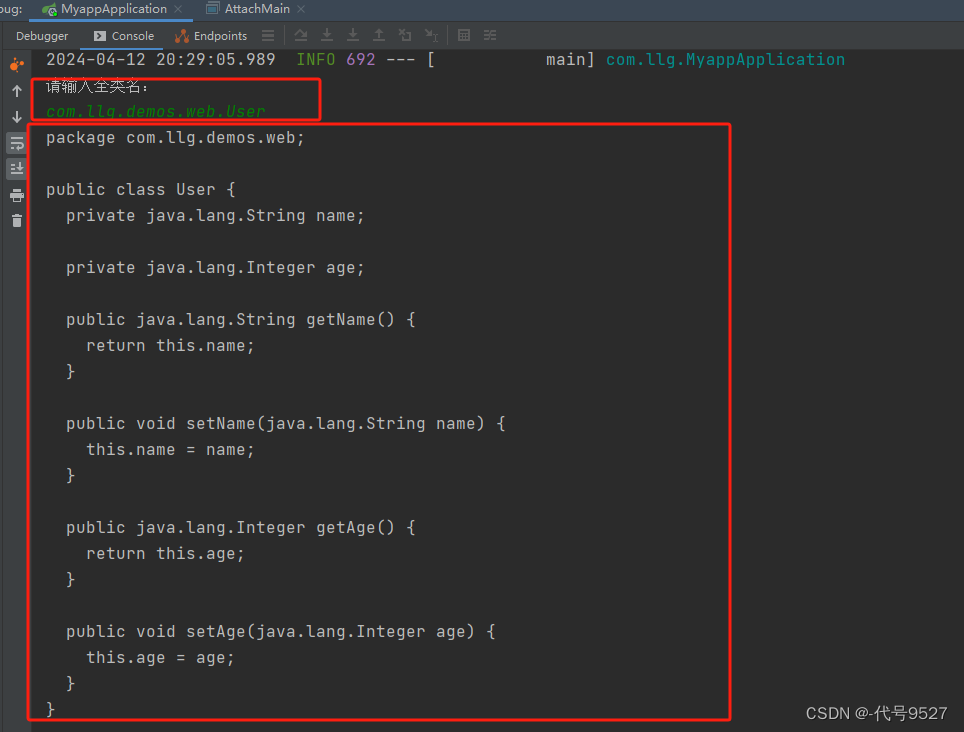
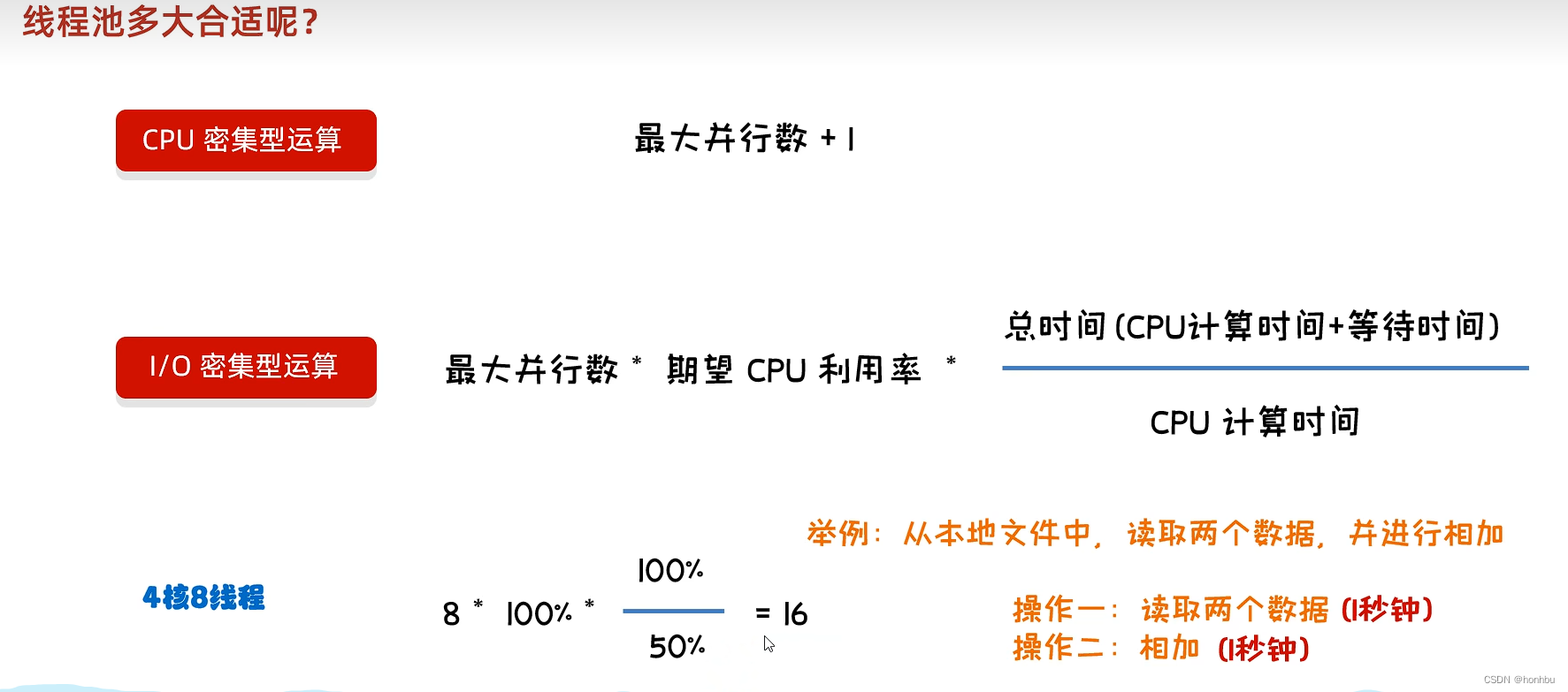
【进阶篇】三、Java Agent实现自定义Arthas工具
文章目录 0、客户端代码1、JMX2、实现:查看内存使用情况3、实现:查看直接内存4、实现:生成堆内存快照5、实现:打印栈信息6、实现:打印类加载器的信息7、实现:打印类的源码8、需求:打印方法的耗时…
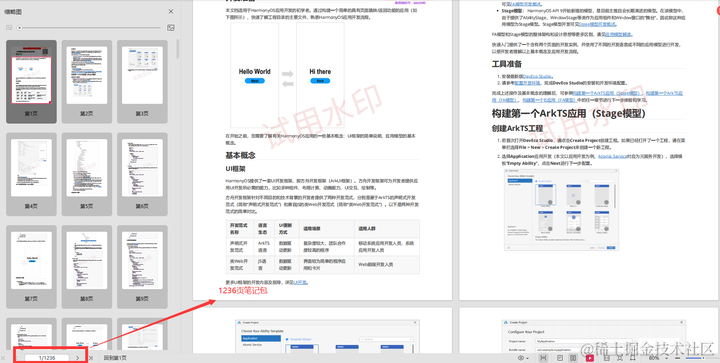
OpenHarmony开发学习:【源码下载和编译】
本文介绍了如何下载鸿蒙系统源码,如何一次性配置可以编译三个目标平台(Hi3516,Hi3518和Hi3861)的编译环境,以及如何将源码编译为三个目标平台的二进制文件。
坑点总结: 下载源码基本上没有太多坑ÿ…