文章目录
- 2014
- LOAM: Lidar Odometry and Mapping in Real-time
- 2018
- LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
- 2020
- LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
- 2021
- LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping
2014
LOAM: Lidar Odometry and Mapping in Real-time
摘要: 我们提出了一种实时的里程测量和映射的方法,使用距离测量从一个2轴激光雷达移动在6-DOF中。这个问题很困难,因为距离测量接收在不同的时间,和运动估计的误差会导致产生的点云的错误配准结果。到目前为止,连贯的3D地图可以通过离线批处理方法建立,通常使用循环闭包来纠正随时间变化的漂移。我们的方法实现了低漂移和低计算复杂度,而不需要高精度的测距或惯性测量。获得这种性能水平的关键思想是将复杂的同时定位和映射问题进行划分,该问题寻求通过两种算法同时优化大量的变量。一种算法在高频率但低保真度下执行测度法来估计激光雷达的速度。另一种算法以较低一个数量级的频率运行,用于点云的精细匹配和配准。这两种算法的结合允许该方法进行实时映射。该方法已通过大量的实验和KITTI测程基准进行了评估。结果表明,该方法可以在现有的离线批处理方法的水平上实现精度。
2018
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
code: https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
摘要: 我们提出了一种轻型的、地面优化的激光雷达测程和映射方法,LeGO-LOAM,用于地面车辆的实时六自由度姿态估计。LeGO-LOAM是轻量级的,因为它可以在低功耗嵌入式系统上实现实时姿态估计。LeGOLOAM是地面优化的,因为它在其分割和优化步骤中利用了地面平面的存在。我们首先应用点云分割来过滤噪声,以及特征提取来获得独特的平面和边缘特征。然后两步黎文堡-马夸特优化方法利用平面和边缘特征来解决连续扫描中六自由度变换的不同分量。我们比较了LeGO-LOAM与最先进的方法LOAM的性能,使用从地面车辆收集的数据集,并表明LeGO-LOAM在降低计算费用的情况下实现了类似或更好的精度。我们还将LeGO-LOAM集成到一个SLAM框架中,以消除由漂移引起的姿态估计误差,并使用KITTI数据集进行了测试。
2020
LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
code: https://github.com/TixiaoShan/LIO-SAM
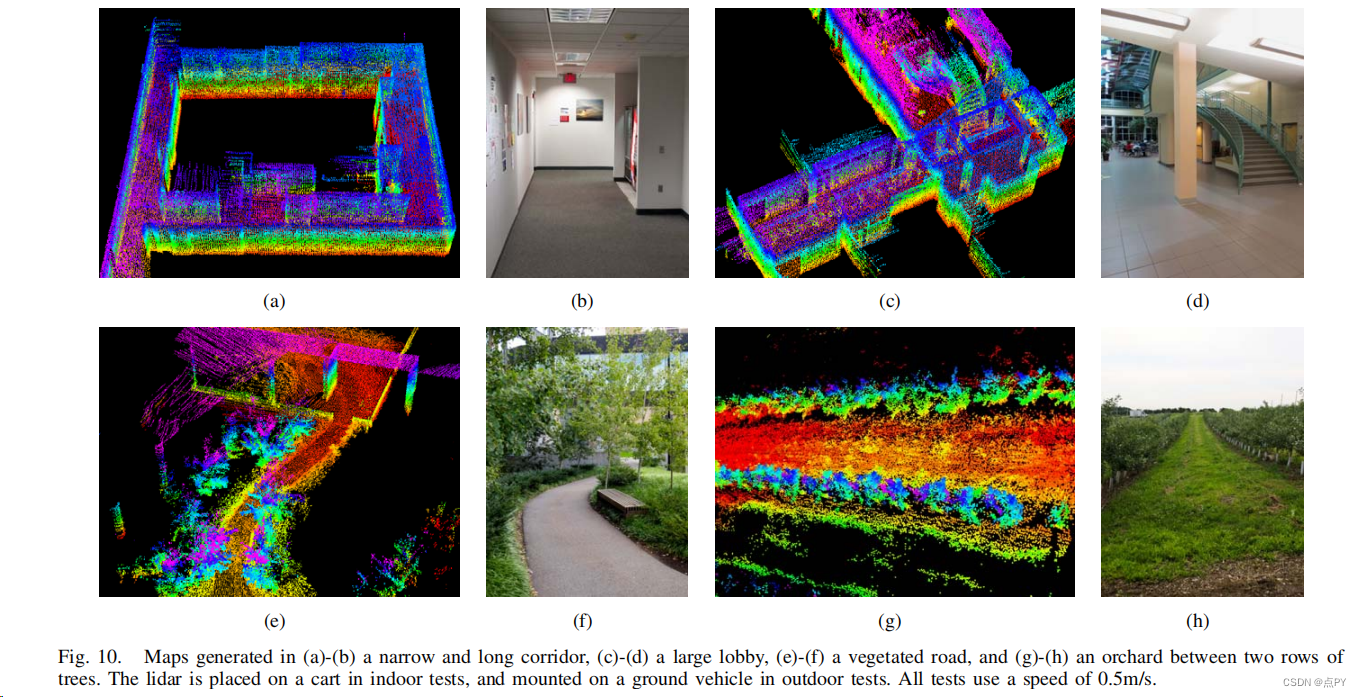
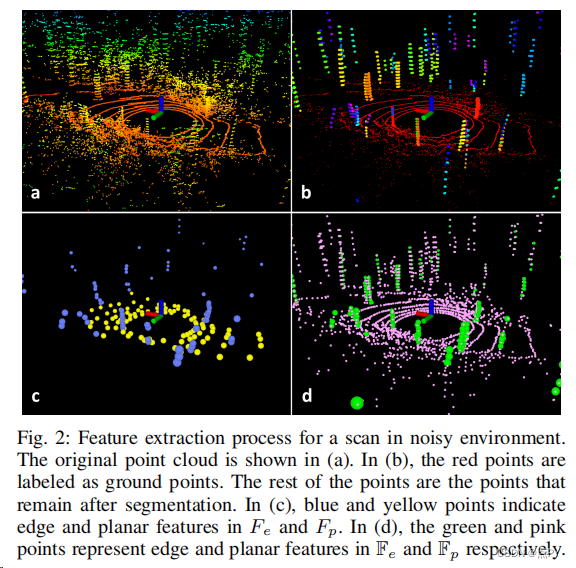
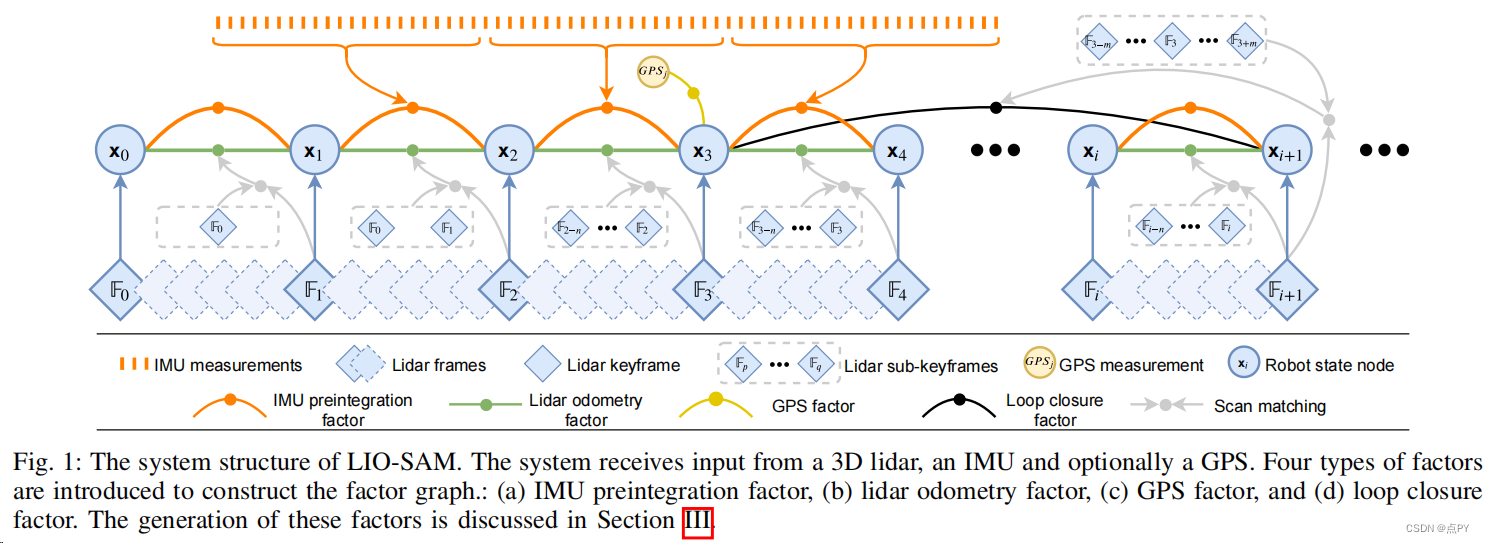
摘要: 我们提出了一个通过平滑和映射的紧密耦合激光雷达惯性测程法框架,LIO-SAM,它实现了高精度、实时的移动机器人轨迹估计和地图构建。LIO-SAM在一个因子图上制定激光雷达惯性测程法,允许大量的相对和绝对测量,包括环路闭包,从不同的来源作为因素纳入系统。从惯性测量单元(IMU)预积分得到的估计运动可以去除点云,并产生激光雷达测程优化的初始猜测。利用所得到的激光雷达测程解来估计IMU的偏差。为了确保实时的高性能,我们边缘旧的激光雷达扫描以进行姿态优化,而不是将激光雷达扫描匹配到全局地图。局部尺度而不是全局尺度的扫描匹配显著提高了系统的实时性能,选择性地引入关键帧,以及有效的滑动窗口方法,将新的关键帧注册到固定大小的先前“子关键帧”集。该方法在不同尺度和环境下的三个平台收集的数据集上进行了广泛的评估。
知乎讲解https://www.zhihu.com/column/c_1619085291536433152
2021
LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping
code: https://github.com/TixiaoShan/LVI-SAM
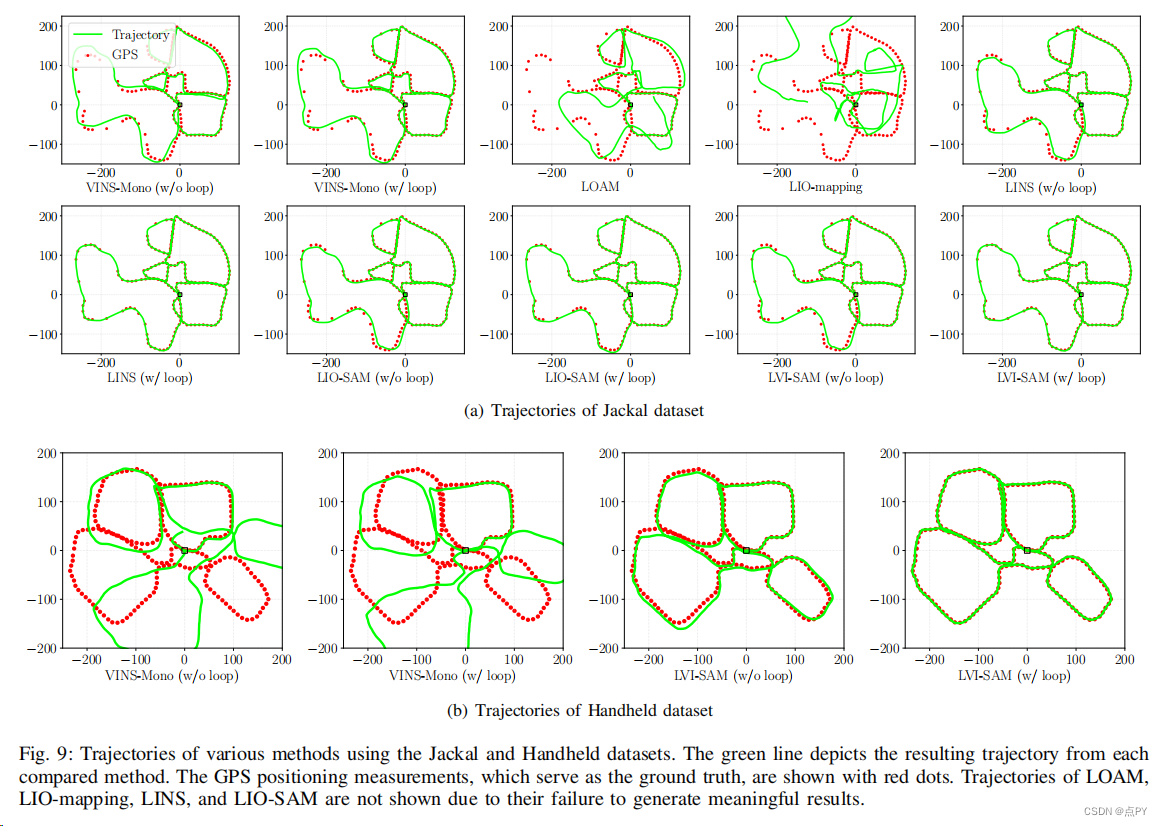
摘要: 我们提出了一个通过平滑和映射的紧密耦合激光视觉惯性测程法框架,LVI-SAM,实现了高精度和鲁棒性的实时状态估计和地图构建。LVI-SAM建立在一个因子图之上,由两个子系统组成:一个视觉惯性系统(VIS)和一个激光雷达惯性系统(LIS)。这两个子系统以紧密耦合的方式设计,其中VIS利用LIS估计来促进初始化。利用激光雷达测量方法提取视觉特征的深度信息,提高了VIS的精度。反过来,LIS利用VIS估计来进行初始猜测,以支持扫描匹配。循环关闭首先由VIS识别,并由LIS进一步细化。LVI-SAM也可以在两个子系统中的一个发生故障时发挥作用,这增加了其在无纹理和无特征环境中的鲁棒性。LVI-SAM在不同规模和环境下的多个平台收集的数据集上进行了广泛的评估。