本文为大家介绍如何使用 串口 接收定长 和 不定长 的数据。
文章目录
- 前言
- 一、串口接收定长数据
- 1. 函数介绍
- 2.代码实现
- 二、串口接收不定长数据
- 1.函数介绍
- 2. 代码实现
- 三,两者回调函数的区别比较
- 四,空闲中断的介绍
- 总结
前言
一、串口接收定长数据
1. 函数介绍
- 开启串口的接收中断:
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
参数:
-
huart:这是一个指向 UART_HandleTypeDef 结构体的指针,用于标识特定的 UART 外设实例。该结构体包含了该 UART 实例的各种配置和状态信息。
-
pData:这是一个指向存储接收数据的缓冲区的指针。当接收到数据时,数据将被存储在该缓冲区中。
-
Size:这是要接收的数据的字节数。函数将尝试从 UART 接收指定数量的字节到 pData 缓冲区中。
- 串口接收完成回调函数:
// 当串口接收到数据就调用该回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
}
参数:
- huart:这是一个指向 UART_HandleTypeDef 结构体的指针,用于标识特定的 UART 外设实例。该结构体包含了该 UART 实例的各种配置和状态信息。
2.代码实现
// 接收数据的缓冲区
uint8_t recv_buff = 0;
// 1. 开启串口接收中断(每次只接收1位数据)
HAL_UART_Receive_IT(&huart1, &recv_buff, 1);
/* 2.中断的方式接收定长的数据 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
if(recv_buff == 'A')
{
printf("recv : A \r\n");
}
else if(recv_buff == 'B')
{
printf("recv : B \r\n");
}
// 再次开启串口接收中断(每次只接收1位数据)
HAL_UART_Receive_IT(&huart1, &recv_buff, 1);
}
}
二、串口接收不定长数据
这里会引入空闲中断,至于什么是空闲中断 在第四大点中会介绍。
1.函数介绍
- 开启串口空闲接收中断
HAL_StatusTypeDef HAL_UARTEx_ReceiveToIdle_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
参数:
- huart:UART 句柄,指向正在使用的串口设备。
- pData:存储接收数据的缓冲区的指针。
- Size:期望接收的数据字节数。
- 串口接收事件回调函数
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
}
参数:
- huart:UART 句柄,指向正在使用的串口设备。
- Size:接收到的数据字节数。
2. 代码实现
uint8_t recv_buff[20] = {0}; // 定义一个长度为 20 的接收缓冲区
// 1.打开空闲接收中断
HAL_UARTEx_ReceiveToIdle_IT(&huart1, recv_buff, sizeof(recv_buff));
// 2. 空闲中断时调用的回调函数
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if(huart->Instance == USART1) // 检查是否为 USART1 串口
{
recv_buff[Size] = '\0'; // 在接收到的数据末尾添加字符串结束符
if(strcmp((char*)recv_buff, "LED ON") == 0)
{
printf("led on is ok\r\n");
}
else if(strcmp((char*)recv_buff, "LED OFF") == 0)
{
printf("led off is ok\r\n");
}
}
// 重新开启空闲接收中断,继续监听串口数据
HAL_UARTEx_ReceiveToIdle_IT(&huart1, recv_buff, sizeof(recv_buff));
}
三,两者回调函数的区别比较
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size);
这两个函数都是串口接收的回调函数,但是它们在触发时机上有所不同:
-
HAL_UART_RxCpltCallback 函数是标准的 HAL 库提供的串口接收完成回调函数。它在每次成功接收到指定数量的数据后被调用,即每当接收完成一个数据包时触发一次。
-
HAL_UARTEx_RxEventCallback 函数是 HAL 扩展库提供的串口接收事件回调函数。它可以在串口接收到特定事件时被调用,比如接收到空闲状态时触发。这个函数可以用于处理更多的接收事件,而不仅仅是每次接收完成一个数据包时触发。
因此,区别在于 HAL_UARTEx_RxEventCallback 函数可以处理更多类型的接收事件,而 HAL_UART_RxCpltCallback 函数仅在每次接收完成一个数据包时触发。
四,空闲中断的介绍
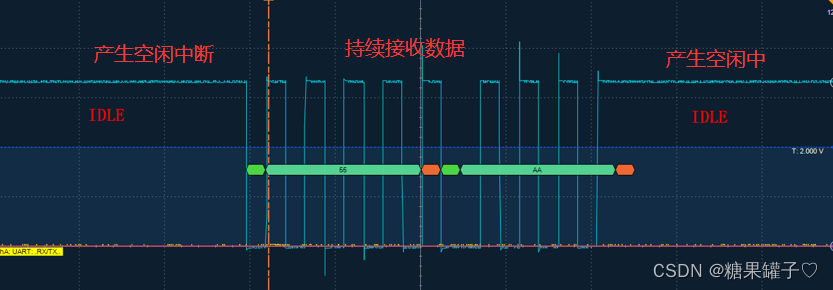
在一帧数据传输结束后,通信线路将会维持高电平,这个状态称为空闲状态。当 CPU 检测到通信线路处于空闲状态时,且空闲状态持续时间大于一个字节传输时间时将会触发空闲中断 。空闲中断的触发通常表示一次完整的数据传输已经结束。
当 产生空闲中断后,会调用 空闲中断的接收事件回调函数,将接收到的数据全部打印出来,这样就可以实现不定长数据的接收。
应用场景:
-
串口通信中的数据帧解析: 在串口通信中,空闲中断常用于解析数据帧。一旦检测到空闲中断,就可以确定一帧数据已经接收完整,并开始解析其中的数据。
-
数据接收超时处理: 空闲中断可以用于实现数据接收的超时处理。如果一定时间内未触发空闲中断,可以认为数据接收超时,并进行相应的处理,例如丢弃接收缓冲区中的数据或发出超时警告。
-
多任务环境下的数据同步: 在多任务系统中,空闲中断可以用于实现任务之间的数据同步。当一个任务接收到完整的数据帧后,可以通过触发空闲中断来通知其他任务进行相关操作或处理。
总之,空闲中断在串口通信中具有重要的作用,用于检测数据传输的完成和触发相应的处理操作,适用于各种数据接收和处理场景。
总结
下一篇文章为大家介绍 串口 UART 协议.。



![[STM32+HAL]DengFOC移植之闭环位置控制](https://img-blog.csdnimg.cn/direct/9851acee69ab4a4fa5ff1c6c9aab40f2.png)