1. 引言
阈值分割可以被视为一个分类问题,通常涉及两个类别,这也是为什么阈值分割也被称为二值化。对于文档图像,我们期望阈值算法能够正确地将墨水分类为黑色,将纸张分类为白色,从而得到二值化图像。对于数字灰度图像,最简单的实现方法是选择一个阈值值,比如图像二值化,并将高于这个值的灰度级别分配为白色,将剩余的级别分配为黑色。问题在于正确找到这个值,以便能够完美匹配前景和背景元素。

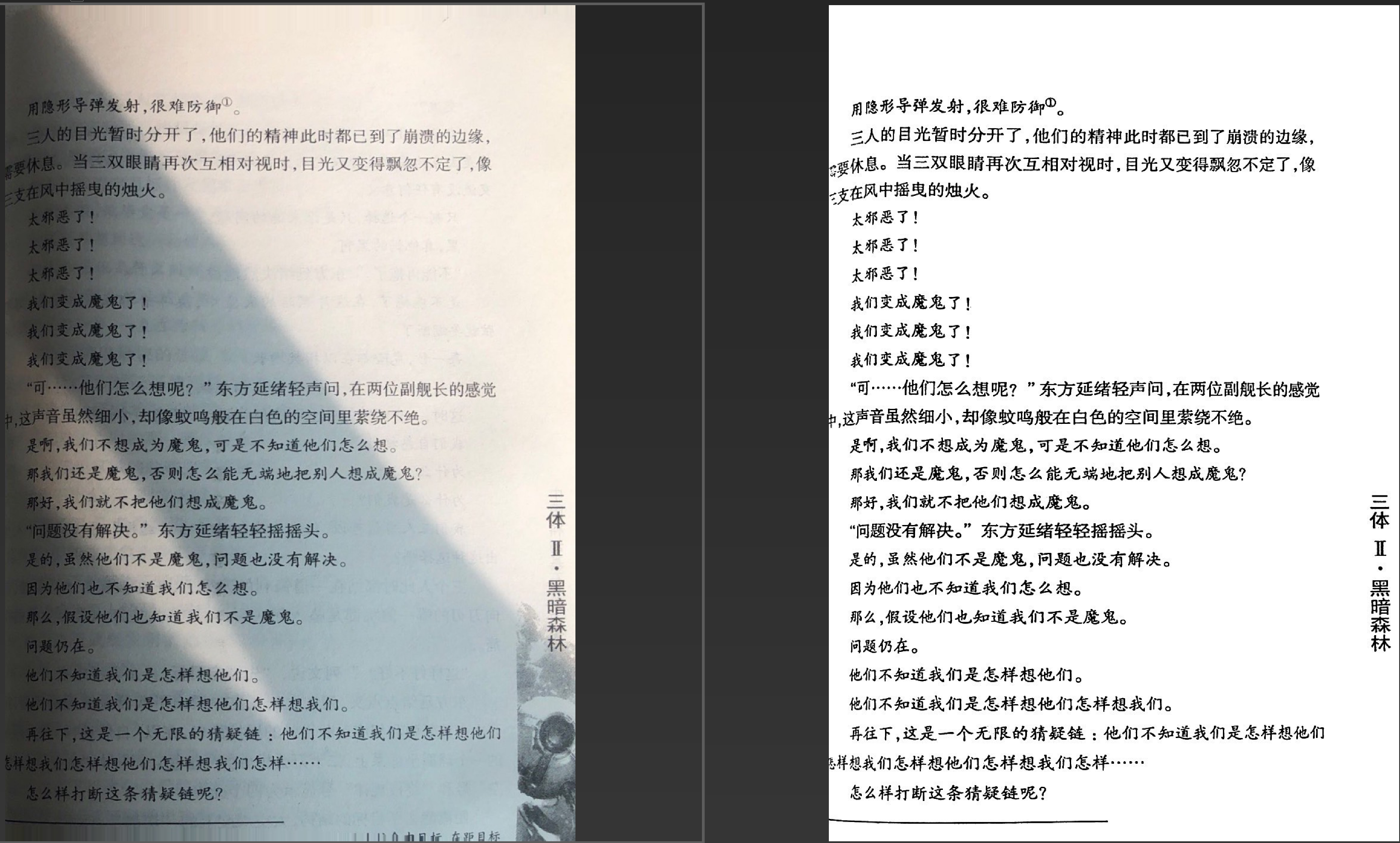
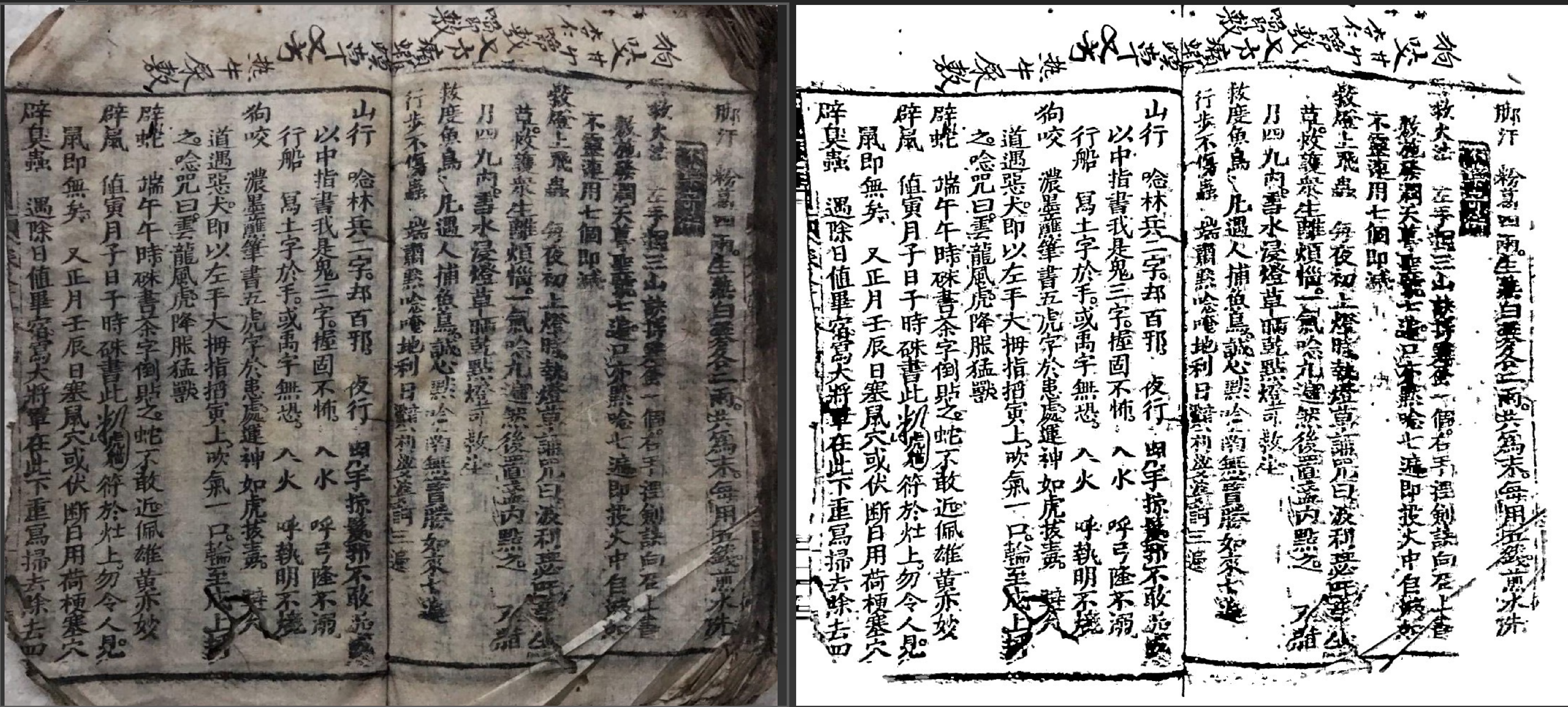
对于文档图像,我们知道预期的结果,尽管存在一些问题使得这个领域变得非常具有挑战性,比如老化退化。老化伪影包括斑点(出现在纸面上的棕褐色斑点)、前后墨水干扰、皱褶纸、胶带标记、折叠痕迹等。
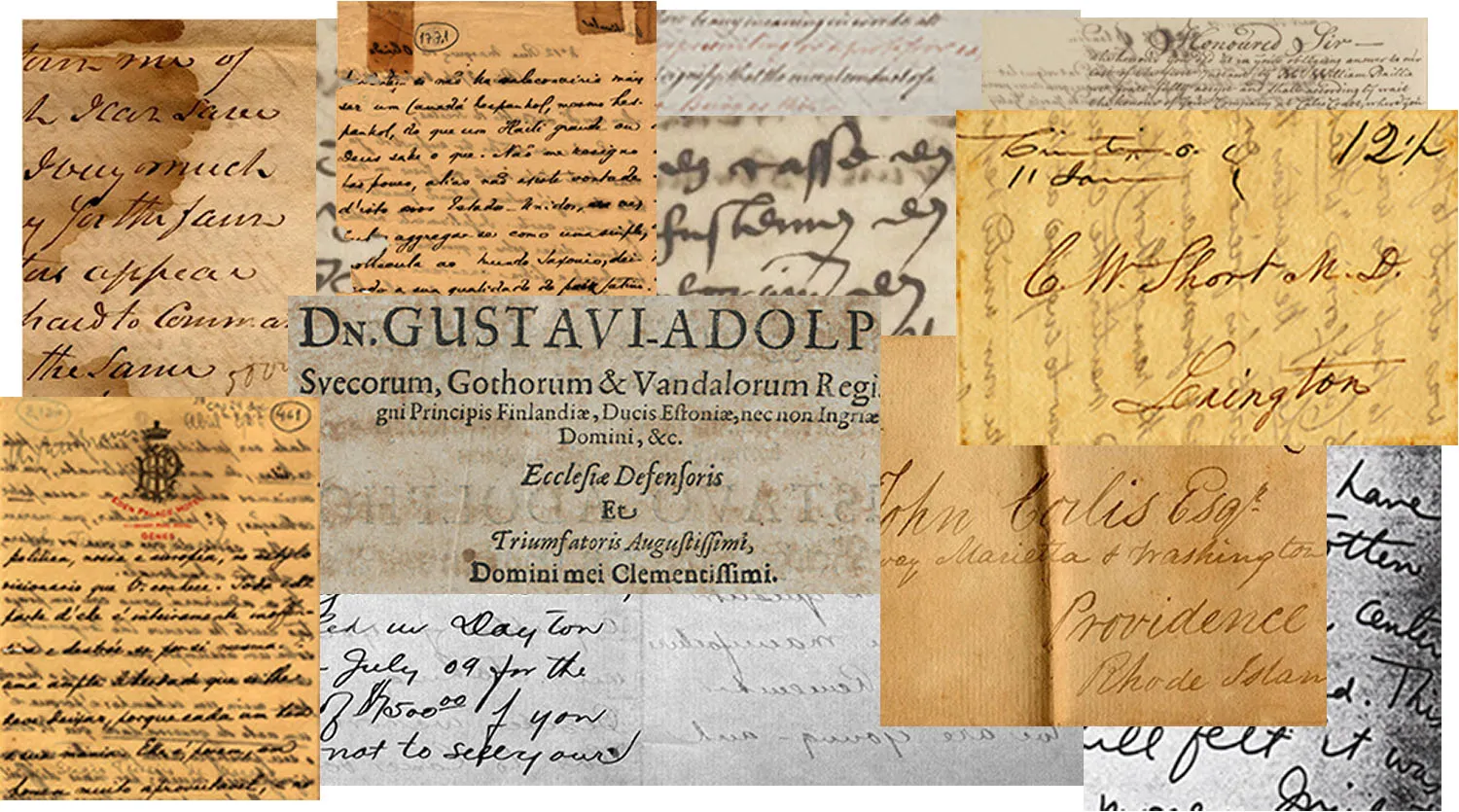
老化过程引起的许多问题的例子,如(右上和右下)老化,(左下和右中)背对前方的干扰和(左上)人为操纵作为胶带和(右下)皱纸造成的问题
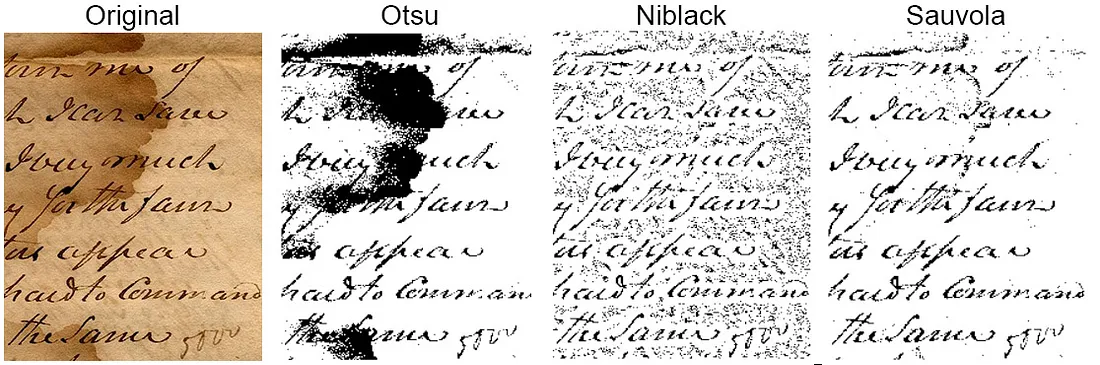
一些二值化技术,如 Otsu[2]、Sauvola[3] 和 Niblack[4],但它们在处理如图 1.2 所示的文档时效果并不理想:
在这里将探讨如何通过使用基于卷积神经网络(CNN)的U-Net架构训练的模型进行分类,来实现具有不同类型问题的文档二值化。CNN的典型用途在于分类任务,其中对图像的输出是一个单一的类别标签。然而,在许多视觉任务中,期望的结果不仅包括图像中物体是否存在,还包括其定位,即每个像素都应该被分配到一个类别标签。
训练代码地址:https://download.csdn.net/download/matt45m/89112642
2.开源数据集
数据集由总共 5,027 张图像及其相应的真实情况(二值参考图像)组成。所使用的图像来自以下数据集:
- 文档图像二值化 (DIB) - Nabuco 数据集:15 张图像 [5]
- DIBCO 和 H-DIBCO (年份: 2009, 2010, 2011, 2012, 2013, 2014, 2016, 2017):116 张图像 [6]
- ICFHR 2016 棕榈叶手稿图像二值化挑战赛:99 张图像 [7]
- ICDAR2017 历史文档作家识别竞赛:4,782 张图像 [8]
- PHIBD 2012 波斯遗产图像二值化数据集:15 张图像 [9]
为了增加样本数量,将对原始图像和二值参考图像应用数据增强。由于模型只接受 256×256 尺寸的图像,将对图像进行分割而不是调整大小;这样,即不丢失信息,并且增加训练样本的数量。
2.1 数据增强
数据增强过程从对原始图像和其真实情况进行转换开始。选择了仅翻转(垂直和水平)和旋转(90°, 180° 和 270°)增强转换。其他转换也是可能的,例如模糊、添加噪声、改变亮度和对比度等。只是要记住,对于这些类型的转换,相应的真实情况不应接受它们。
应用转换后,结果图像和原始图像经过切割过程,产生 256×256 像素的图像。在生成增强的代码中,有可能增加结果图像的数量,使切割步骤小于 256,生成重叠的切割。
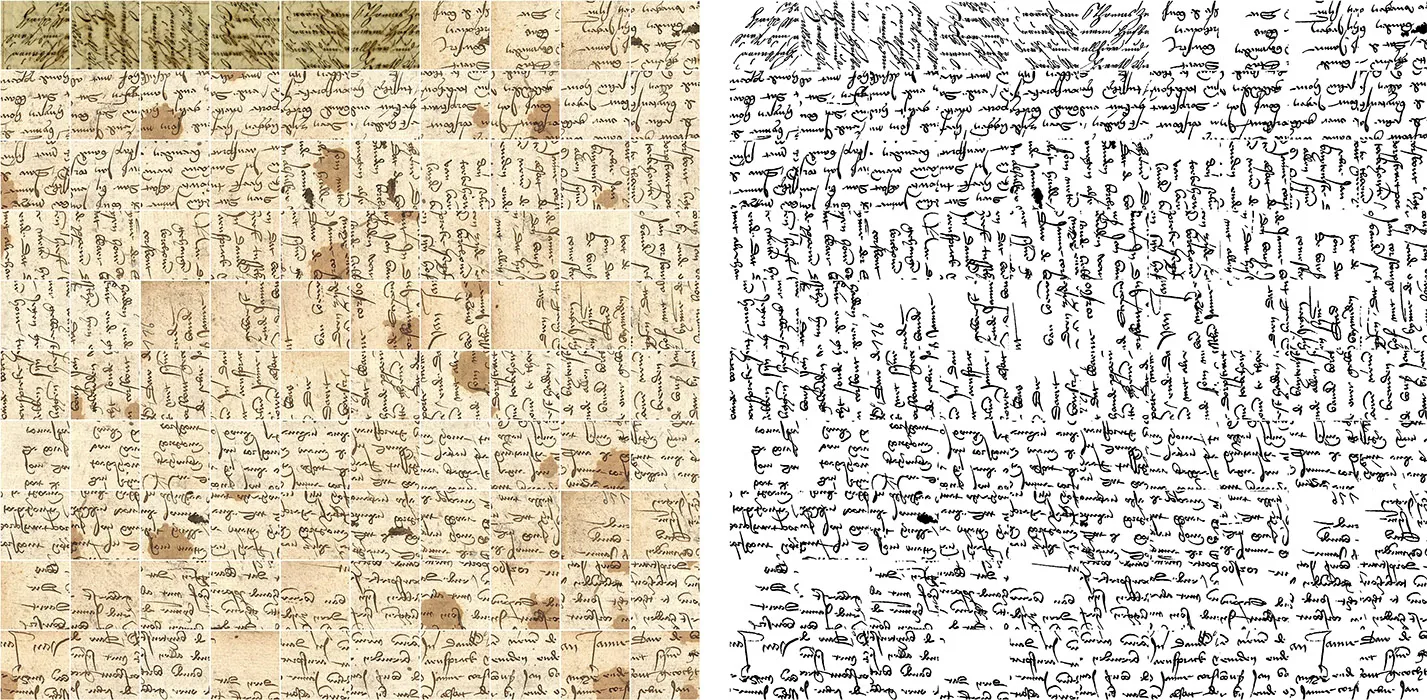
下图通过动画展示了切割过程。灰色线条显示了切割器将如何分割图像。左侧图像的步长为 256,而右侧为 128。请注意,在两种情况下裁剪图像的最终大小都是相同的(256×256),如白色方框中所示。


使用 5,027 张图像的数据集,步长为 256 的切割产生 27,630 张图像,而步长为 128 产生 97,146 张图像。请注意,这个数字甚至不到四倍,原因是接近图像边缘时的原因,不需要处理。
3. U-Net 模型架构
U-Net 是从传统的卷积神经网络演变而来的,最初由 Olaf Ronneberger 等人在 2015 年为生物医学图像分割设计和应用。一般的卷积神经网络专注于图像分类,其中输入是一张图像,输出是一个或多个模式标签。然而,在许多视觉任务中,期望的结果不仅包括图像中物体是否存在,还包括其定位,即每个像素都应该被分配到一个类别标签。
3.1 卷积
更正式地说,卷积是一个积分,它表示一个函数 g 在另一个函数 f 上移动时的重叠量,但在数字图像处理和深度学习中,卷积是将两个图像结合起来形成第三个图像的数学方法。通常,两个结合的图像中有一个不是图像,而是一个滤波器(或核心),一个值矩阵,其大小和值决定了卷积过程的效果类型。主要思想是将核心放置在每个像素上(横跨整个图像),并将其值与目标像素及其局部邻居相乘并求和。

卷积在数字图像处理中最常见的用途是边缘检测、模糊和去噪。虽然在 CNN 中卷积的中间层的效果众所周知,但可以通过展示最终应用来使其更加明显。

卷积在数字图像处理中最常见的用途是边缘检测、模糊和去噪。虽然在 CNN 中卷积的中间层的效果众所周知,但可以通过展示最终应用来使其更加明显。
上图 显示了在左侧图像上应用的不同核心的卷积,首先是模糊,然后是 Sobel 边缘检测。我使用了这两个卷积在原始图像的灰度版本上。使用 CNN 时,卷积分别应用于每个 RGB 通道,这在图像处理中并不常见,因为它会产生奇怪的结果。
填充:如上例所示,结果图像比原始图像小,差距与核心大小有关;核心越大,中心离图像边缘越远。为了产生与输入相同大小的输出,在边缘添加额外的像素进行填充。这样,当滑动时,核心可以让原始边缘像素位于其中心,同时延伸到边缘之外的额外像素。

如上图显示了使用 OpenCV 的 copyMakeBorder 函数的一些填充方法。原始图像来自核心滤波器,每个角落有四个颜色点以帮助展示每种方法的差异。

步幅:步幅是核心窗口在输入矩阵上每次移动的像素数。步幅为一意味着每次滑动间隔一个像素,因此每个单独的滑动都作为一个标准卷积。步幅为二意味着每次滑动间隔两个像素,在此过程中跳过每隔一个滑动,大致缩小了两倍。步幅为三意味着跳过每两个滑动,大致缩小了三倍,以此类推。
3.2 U-Net 的工作原理
该架构包含两条路径,如下图所示。第一条路径是收缩路径(也称为编码器),用于捕捉图像中的上下文。编码器只是传统的卷积和最大池化层堆栈。第二条路径是对称的扩展路径(也称为解码器),用于使用转置卷积进行精确定位,以对输入特征图进行上采样。它是一个端到端的全卷积网络,没有任何密集层。
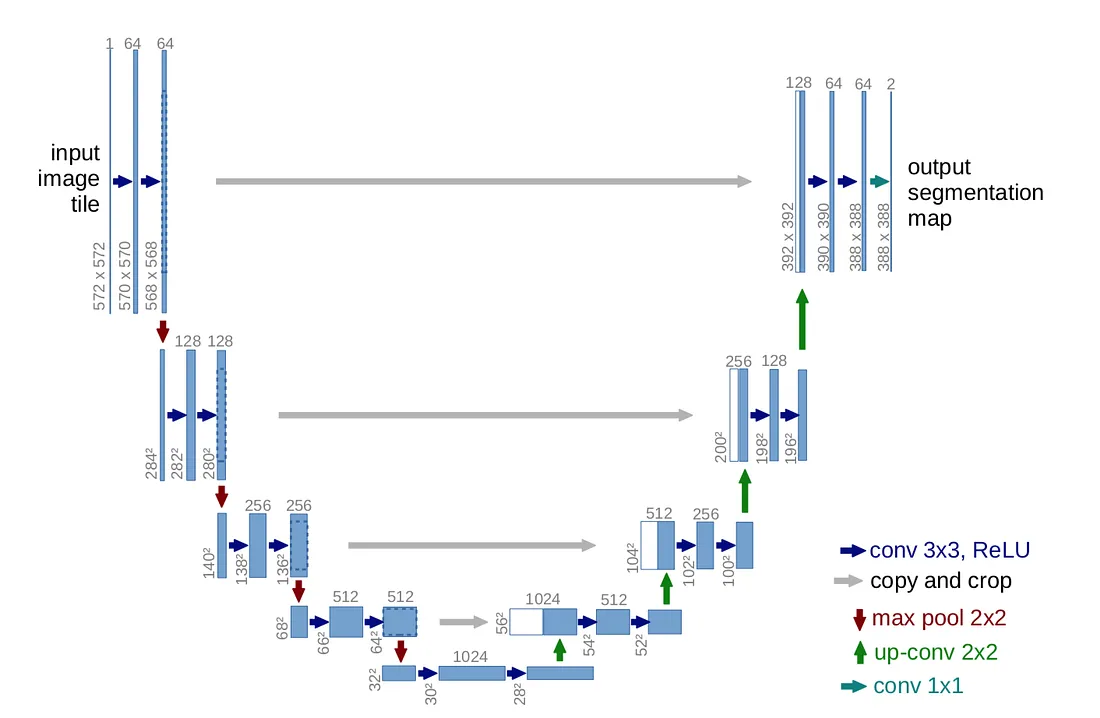
U-Net 架构(以最低分辨率的 32x32 像素为例)。每个蓝色框对应一个多通道特征图。通道数在框的顶部标注。x-y 大小在框的左下角提供。白色框表示复制的特征图。箭头表示不同的操作
每个编码器块接收输入,与相应裁剪的特征图进行连接,应用两个 3×3 卷积(无填充),每个卷积后跟一个修正线性单元(ReLu),然后是一个 2×2 最大池化操作,步幅为 2 进行下采样,如图 3.7 详细说明。
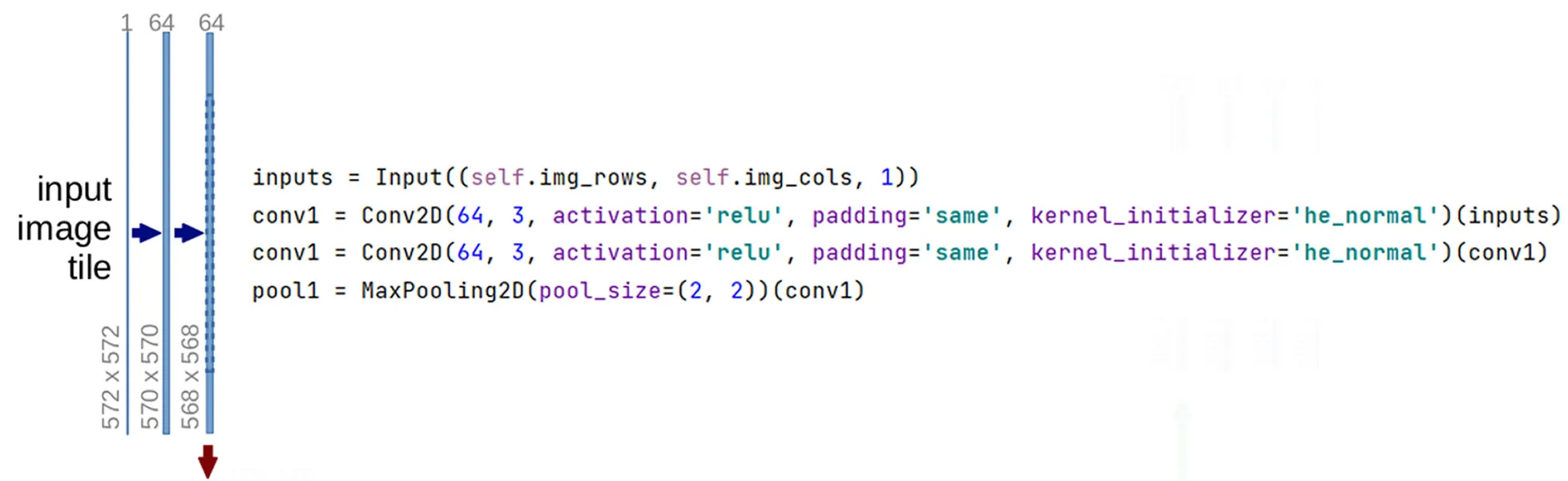
每个解码器块由两个卷积层组成,在本项目中,输入图像的形状从 256×256×1 变为 256×256×64,在第一个卷积过程中,特征通道的深度增加了 64 倍。请注意,在上图所示的代码中,使用了 padding=’same’(用零填充额外的边界,但可以在使用 padding=’valid’ 的 Keras 中进行非填充卷积);这样,卷积过程不会减小图像尺寸。Ronneberger 等人使用了非填充卷积,原因如下:‘由于每次卷积都会丢失边界像素,所以裁剪是必要的’ 。在 U-Net 的原始实现中,输入是一张 128×128×1 图像,编码器输出一个 8×8×256 形状。

解码器由扩展块组成,每个块包括使用 2×2 上采样层(转置卷积)对特征图进行上采样,该层将特征通道的数量减半,与编码器路径中相应裁剪的特征图进行连接,以及两个 3×3 卷积,每个卷积后跟一个 ReLU,如上图像所示。由于每次卷积都会丢失边界像素,裁剪是必要的。由于我在编码器中采用了填充卷积(padding=’same’),因此裁剪过程是不必要的。
在 U-Net 的原始实现中,解码器将形状从 8×8×256 增加到 128×128×1。该过程以一个 1×1 卷积结束,将每个 64 个组件的特征向量映射到所需的类别数。
4. 改进算法
在算法实现的过程中,发现很多文档图像都是整张A4左右的大小,而Unet的模型的输入最大为256,为了改进输入的局限,这里模型结构借签了Enet,代码使用的框架是Pytorch。
Unet网络部分:
import torch.nn as nn
import torch
class Inception(nn.Module):
def __init__(self, in_ch, out_ch):
super(Inception, self).__init__()
hide_ch = out_ch // 2
self.inception = nn.Sequential(
nn.Conv2d(in_ch, hide_ch, 1),
nn.BatchNorm2d(hide_ch),
nn.ReLU(inplace=True),
nn.Conv2d(hide_ch, hide_ch, 3, padding=1, groups=hide_ch),
nn.BatchNorm2d(hide_ch),
nn.ReLU(inplace=True),
nn.Conv2d(hide_ch, out_ch, 1)
)
def forward(self, x):
return self.inception(x)
class DoubleConv(nn.Module):
def __init__(self, in_ch, out_ch):
super(DoubleConv, self).__init__()
self.doubleConv = nn.Sequential(
Inception(in_ch, out_ch),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True),
Inception(out_ch, out_ch),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.doubleConv(x)
class UNet(nn.Module):
def __init__(self, in_ch, out_ch):
super(UNet, self).__init__()
# down
self.conv1 = DoubleConv(in_ch, 64)
self.pool1 = nn.Conv2d(64, 64, 2, 2, groups=64)
self.conv2 = DoubleConv(64, 128)
self.pool2 = nn.Conv2d(128, 128, 2, 2, groups=128)
self.bottom = DoubleConv(128, 256)
# up
self.up3 = nn.ConvTranspose2d(256, 128, 2, 2)
self.conv3 = DoubleConv(128 * 2, 128)
self.up4 = nn.ConvTranspose2d(128, 64, 2, 2)
self.conv4 = DoubleConv(64 * 2, 64)
self.out = nn.Conv2d(64, out_ch, 1)
def forward(self, x):
# down
conv1 = self.conv1(x)
pool1 = self.pool1(conv1)
conv2 = self.conv2(pool1)
pool2 = self.pool2(conv2)
bottom = self.bottom(pool2)
# up
up3 = self.up3(bottom)
merge3 = torch.cat([up3, conv2], dim=1)
conv3 = self.conv3(merge3)
up4 = self.up4(conv3)
merge4 = torch.cat([up4, conv1], dim=1)
conv4 = self.conv4(merge4)
out = self.out(conv4)
return nn.Sigmoid()(out)
if __name__ == '__main__':
net = UNet(1, 2)
inputs = torch.zeros((1, 1, 512, 512), dtype=torch.float32)
output = net(inputs)
print(output.size())
使用ENet实现:
import torch.nn as nn
import torch
class InitialBlock(nn.Module):
def __init__(self,
in_channels,
out_channels,
bias=False,
relu=True):
super().__init__()
if relu:
activation = nn.ReLU
else:
activation = nn.PReLU
# Main branch - As stated above the number of output channels for this
# branch is the total minus 3, since the remaining channels come from
# the extension branch
self.main_branch = nn.Conv2d(
in_channels,
out_channels - 1,
kernel_size=3,
stride=2,
padding=1,
bias=bias)
# Extension branch
self.ext_branch = nn.MaxPool2d(3, stride=2, padding=1)
# Initialize batch normalization to be used after concatenation
self.batch_norm = nn.BatchNorm2d(out_channels)
# PReLU layer to apply after concatenating the branches
self.out_activation = activation()
def forward(self, x):
main = self.main_branch(x)
ext = self.ext_branch(x)
# Concatenate branches
out = torch.cat((main, ext), 1)
# Apply batch normalization
out = self.batch_norm(out)
return self.out_activation(out)
class RegularBottleneck(nn.Module):
def __init__(self,
channels,
internal_ratio=4,
kernel_size=3,
padding=0,
dilation=1,
asymmetric=False,
dropout_prob=0,
bias=False,
relu=True):
super().__init__()
# Check in the internal_scale parameter is within the expected range
# [1, channels]
if internal_ratio <= 1 or internal_ratio > channels:
raise RuntimeError("Value out of range. Expected value in the "
"interval [1, {0}], got internal_scale={1}."
.format(channels, internal_ratio))
internal_channels = channels // internal_ratio
if relu:
activation = nn.ReLU
else:
activation = nn.PReLU
# Main branch - shortcut connection
# Extension branch - 1x1 convolution, followed by a regular, dilated or
# asymmetric convolution, followed by another 1x1 convolution, and,
# finally, a regularizer (spatial dropout). Number of channels is constant.
# 1x1 projection convolution
self.ext_conv1 = nn.Sequential(
nn.Conv2d(
channels,
internal_channels,
kernel_size=1,
stride=1,
bias=bias), nn.BatchNorm2d(internal_channels), activation())
# If the convolution is asymmetric we split the main convolution in
# two. Eg. for a 5x5 asymmetric convolution we have two convolution:
# the first is 5x1 and the second is 1x5.
if asymmetric:
self.ext_conv2 = nn.Sequential(
nn.Conv2d(
internal_channels,
internal_channels,
kernel_size=(kernel_size, 1),
stride=1,
padding=(padding, 0),
dilation=dilation,
bias=bias), nn.BatchNorm2d(internal_channels), activation(),
nn.Conv2d(
internal_channels,
internal_channels,
kernel_size=(1, kernel_size),
stride=1,
padding=(0, padding),
dilation=dilation,
bias=bias), nn.BatchNorm2d(internal_channels), activation())
else:
self.ext_conv2 = nn.Sequential(
nn.Conv2d(
internal_channels,
internal_channels,
kernel_size=kernel_size,
stride=1,
padding=padding,
dilation=dilation,
bias=bias), nn.BatchNorm2d(internal_channels), activation())
# 1x1 expansion convolution
self.ext_conv3 = nn.Sequential(
nn.Conv2d(
internal_channels,
channels,
kernel_size=1,
stride=1,
bias=bias), nn.BatchNorm2d(channels), activation())
self.ext_regul = nn.Dropout2d(p=dropout_prob)
# PReLU layer to apply after adding the branches
self.out_activation = activation()
def forward(self, x):
# Main branch shortcut
main = x
# Extension branch
ext = self.ext_conv1(x)
ext = self.ext_conv2(ext)
ext = self.ext_conv3(ext)
ext = self.ext_regul(ext)
# Add main and extension branches
out = main + ext
return self.out_activation(out)
class DownsamplingBottleneck(nn.Module):
def __init__(self,
in_channels,
out_channels,
internal_ratio=4,
return_indices=False,
dropout_prob=0,
bias=False,
relu=True):
super().__init__()
# Store parameters that are needed later
self.return_indices = return_indices
# Check in the internal_scale parameter is within the expected range
# [1, channels]
if internal_ratio <= 1 or internal_ratio > in_channels:
raise RuntimeError("Value out of range. Expected value in the "
"interval [1, {0}], got internal_scale={1}. "
.format(in_channels, internal_ratio))
internal_channels = in_channels // internal_ratio
if relu:
activation = nn.ReLU
else:
activation = nn.PReLU
# Main branch - max pooling followed by feature map (channels) padding
self.main_max1 = nn.MaxPool2d(
2,
stride=2,
return_indices=return_indices)
# Extension branch - 2x2 convolution, followed by a regular, dilated or
# asymmetric convolution, followed by another 1x1 convolution. Number
# of channels is doubled.
# 2x2 projection convolution with stride 2
self.ext_conv1 = nn.Sequential(
nn.Conv2d(
in_channels,
internal_channels,
kernel_size=2,
stride=2,
bias=bias), nn.BatchNorm2d(internal_channels), activation())
# Convolution
self.ext_conv2 = nn.Sequential(
nn.Conv2d(
internal_channels,
internal_channels,
kernel_size=3,
stride=1,
padding=1,
bias=bias), nn.BatchNorm2d(internal_channels), activation())
# 1x1 expansion convolution
self.ext_conv3 = nn.Sequential(
nn.Conv2d(
internal_channels,
out_channels,
kernel_size=1,
stride=1,
bias=bias), nn.BatchNorm2d(out_channels), activation())
self.ext_regul = nn.Dropout2d(p=dropout_prob)
# PReLU layer to apply after concatenating the branches
self.out_activation = activation()
def forward(self, x):
# Main branch shortcut
if self.return_indices:
main, max_indices = self.main_max1(x)
else:
main = self.main_max1(x)
# Extension branch
ext = self.ext_conv1(x)
ext = self.ext_conv2(ext)
ext = self.ext_conv3(ext)
ext = self.ext_regul(ext)
# Main branch channel padding
n, ch_ext, h, w = ext.size()
ch_main = main.size()[1]
padding = torch.zeros(n, ch_ext - ch_main, h, w)
# Before concatenating, check if main is on the CPU or GPU and
# convert padding accordingly
if main.is_cuda:
padding = padding.cuda()
# Concatenate
if int(ch_ext - ch_main) == 48:
main = torch.cat((main, main), 1)
main = torch.cat((main, main), 1)
else:
main = torch.cat((main, main), 1)
# main = torch.cat((main, padding), 1)
# Add main and extension branches
out = main + ext
return self.out_activation(out), max_indices
class UpsamplingBottleneck(nn.Module):
def __init__(self,
in_channels,
out_channels,
internal_ratio=4,
dropout_prob=0,
bias=False,
relu=True):
super().__init__()
# Check in the internal_scale parameter is within the expected range
# [1, channels]
if internal_ratio <= 1 or internal_ratio > in_channels:
raise RuntimeError("Value out of range. Expected value in the "
"interval [1, {0}], got internal_scale={1}. "
.format(in_channels, internal_ratio))
internal_channels = in_channels // internal_ratio
if relu:
activation = nn.ReLU
else:
activation = nn.PReLU
# Main branch - max pooling followed by feature map (channels) padding
self.main_conv1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, bias=bias),
nn.BatchNorm2d(out_channels))
# Remember that the stride is the same as the kernel_size, just like
# the max pooling layers
self.main_unpool1 = nn.MaxUnpool2d(kernel_size=2)
# Extension branch - 1x1 convolution, followed by a regular, dilated or
# asymmetric convolution, followed by another 1x1 convolution. Number
# of channels is doubled.
# self.up1 = nn.ConvTranspose2d(out_channels, out_channels, 2, 2)
# 1x1 projection convolution with stride 1
self.ext_conv1 = nn.Sequential(
nn.Conv2d(
in_channels, internal_channels, kernel_size=1, bias=bias),
nn.BatchNorm2d(internal_channels), activation())
# Transposed convolution
self.ext_tconv1 = nn.ConvTranspose2d(
internal_channels,
internal_channels,
kernel_size=2,
stride=2,
bias=bias)
self.ext_tconv1_bnorm = nn.BatchNorm2d(internal_channels)
self.ext_tconv1_activation = activation()
# 1x1 expansion convolution
self.ext_conv2 = nn.Sequential(
nn.Conv2d(
internal_channels, out_channels, kernel_size=1, bias=bias),
nn.BatchNorm2d(out_channels), activation())
self.ext_regul = nn.Dropout2d(p=dropout_prob)
# PReLU layer to apply after concatenating the branches
self.out_activation = activation()
def forward(self, x, max_indices, output_size):
# Main branch shortcut
main = self.main_conv1(x)
# main = self.up1(main)
main = nn.Upsample(size=output_size[2:], mode='bilinear')(main)
# main = self.main_unpool1(
# main, max_indices, output_size=output_size)
# Extension branch
ext = self.ext_conv1(x)
ext = self.ext_tconv1(ext, output_size=output_size)
ext = self.ext_tconv1_bnorm(ext)
ext = self.ext_tconv1_activation(ext)
ext = self.ext_conv2(ext)
ext = self.ext_regul(ext)
# Add main and extension branches
out = main + ext
return self.out_activation(out)
class ENet(nn.Module):
def __init__(self, num_classes, encoder_relu=True, decoder_relu=True):
super().__init__()
self.initial_block = InitialBlock(1, 16, relu=encoder_relu)
# Stage 1 - Encoder
self.downsample1_0 = DownsamplingBottleneck(
16,
64,
return_indices=True,
dropout_prob=0.01,
relu=encoder_relu)
self.regular1_1 = RegularBottleneck(
64, padding=1, dropout_prob=0.01, relu=encoder_relu)
self.regular1_2 = RegularBottleneck(
64, padding=1, dropout_prob=0.01, relu=encoder_relu)
self.regular1_3 = RegularBottleneck(
64, padding=1, dropout_prob=0.01, relu=encoder_relu)
self.regular1_4 = RegularBottleneck(
64, padding=1, dropout_prob=0.01, relu=encoder_relu)
# Stage 2 - Encoder
self.downsample2_0 = DownsamplingBottleneck(
64,
128,
return_indices=True,
dropout_prob=0.1,
relu=encoder_relu)
self.regular2_1 = RegularBottleneck(
128, padding=1, dropout_prob=0.1, relu=encoder_relu)
self.dilated2_2 = RegularBottleneck(
128, dilation=2, padding=2, dropout_prob=0.1, relu=encoder_relu)
self.asymmetric2_3 = RegularBottleneck(
128,
kernel_size=5,
padding=2,
asymmetric=True,
dropout_prob=0.1,
relu=encoder_relu)
self.dilated2_4 = RegularBottleneck(
128, dilation=4, padding=4, dropout_prob=0.1, relu=encoder_relu)
self.regular2_5 = RegularBottleneck(
128, padding=1, dropout_prob=0.1, relu=encoder_relu)
self.dilated2_6 = RegularBottleneck(
128, dilation=8, padding=8, dropout_prob=0.1, relu=encoder_relu)
self.asymmetric2_7 = RegularBottleneck(
128,
kernel_size=5,
asymmetric=True,
padding=2,
dropout_prob=0.1,
relu=encoder_relu)
self.dilated2_8 = RegularBottleneck(
128, dilation=16, padding=16, dropout_prob=0.1, relu=encoder_relu)
# Stage 3 - Encoder
self.regular3_0 = RegularBottleneck(
128, padding=1, dropout_prob=0.1, relu=encoder_relu)
self.dilated3_1 = RegularBottleneck(
128, dilation=2, padding=2, dropout_prob=0.1, relu=encoder_relu)
self.asymmetric3_2 = RegularBottleneck(
128,
kernel_size=5,
padding=2,
asymmetric=True,
dropout_prob=0.1,
relu=encoder_relu)
self.dilated3_3 = RegularBottleneck(
128, dilation=4, padding=4, dropout_prob=0.1, relu=encoder_relu)
self.regular3_4 = RegularBottleneck(
128, padding=1, dropout_prob=0.1, relu=encoder_relu)
self.dilated3_5 = RegularBottleneck(
128, dilation=8, padding=8, dropout_prob=0.1, relu=encoder_relu)
self.asymmetric3_6 = RegularBottleneck(
128,
kernel_size=5,
asymmetric=True,
padding=2,
dropout_prob=0.1,
relu=encoder_relu)
self.dilated3_7 = RegularBottleneck(
128, dilation=16, padding=16, dropout_prob=0.1, relu=encoder_relu)
# Stage 4 - Decoder
self.upsample4_0 = UpsamplingBottleneck(
128, 64, dropout_prob=0.1, relu=decoder_relu)
self.regular4_1 = RegularBottleneck(
128, padding=1, dropout_prob=0.1, relu=decoder_relu)
self.regular4_2 = RegularBottleneck(
128, padding=1, dropout_prob=0.1, relu=decoder_relu)
# Stage 5 - Decoder
self.upsample5_0 = UpsamplingBottleneck(
128, 16, dropout_prob=0.1, relu=decoder_relu)
self.regular5_1 = RegularBottleneck(
32, padding=1, dropout_prob=0.1, relu=decoder_relu)
self.regular5_2 = RegularBottleneck(
32, padding=1, dropout_prob=0.1, relu=decoder_relu)
self.transposed_conv = nn.ConvTranspose2d(
32,
num_classes,
kernel_size=3,
stride=2,
padding=1,
bias=False)
def forward(self, x):
# Initial block
input_size = x.size()
x = self.initial_block(x)
# Stage 1 - Encoder
stage1_input_size = x.size()
stage1_input = x
x, max_indices1_0 = self.downsample1_0(x)
x = self.regular1_1(x)
x = self.regular1_2(x)
x = self.regular1_3(x)
x = self.regular1_4(x)
# Stage 2 - Encoder
stage2_input_size = x.size()
stage2_input = x
x, max_indices2_0 = self.downsample2_0(x)
x = self.regular2_1(x)
x = self.dilated2_2(x)
x = self.asymmetric2_3(x)
x = self.dilated2_4(x)
x = self.regular2_5(x)
x = self.dilated2_6(x)
x = self.asymmetric2_7(x)
x = self.dilated2_8(x)
# Stage 3 - Encoder
x = self.regular3_0(x)
x = self.dilated3_1(x)
x = self.asymmetric3_2(x)
x = self.dilated3_3(x)
x = self.regular3_4(x)
x = self.dilated3_5(x)
x = self.asymmetric3_6(x)
x = self.dilated3_7(x)
# Stage 4 - Decoder
x = self.upsample4_0(x, max_indices2_0, output_size=stage2_input_size)
x = torch.cat([stage2_input, x], dim=1)
x = self.regular4_1(x)
x = self.regular4_2(x)
# Stage 5 - Decoder
x = self.upsample5_0(x, max_indices1_0, output_size=stage1_input_size)
x = torch.cat([stage1_input, x], dim=1)
x = self.regular5_1(x)
x = self.regular5_2(x)
x = self.transposed_conv(x, output_size=input_size)
return nn.Sigmoid()(x)
if __name__ == '__main__':
net = ENet(2)
inputs = torch.zeros((1, 1, 512, 512), dtype=torch.float32)
output = net(inputs)
print(output.size())
6.数据集
6.1 数据集准备
数据集是使用PS或者类似的工具做去掉背景处理出来的标签文件,如下图:
数据集标注好之后,把清除背景的图像放一个目录,原图放一个目录,图像的名称要相同,层级结构如下图:
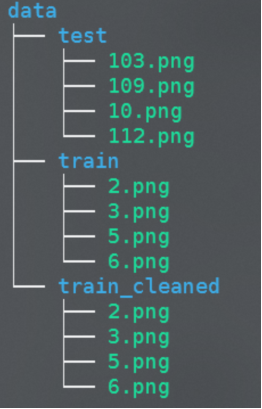
data/test存放测试图像
data/train存放训练原始图像
data/train_cleaned存放去背景后的图像
7.环境安装与训练
7.1 环境安装
conda create --name unet python=3.7
conda activate unet
conda install pytorch torchvision cudatoolkit=10.2 -c pytorch
pip install cython matplotlib tqdm opencv-python scipy pillow
7.2 训练
运行以下命令:
python train.py --data_path data --batch_size 64 --epoch 100 --checkpoint_path checkpoints --lr 0.001
参数说明:
•–data_path:训练数据目录,在该目录下需要有train和train_cleaned两个文件夹
•–batch_size:训练batch size
•–epoch:训练epoch数
•–checkpoint_path:模型保存目录
•–lr:学习率
7.3 测试
python predict.py --image_path data/test --weight checkpoints/last.pth --output_path results
参数说明:
•–weight: 训练得到的模型
•–image_path:图像文件夹路径
•–output_path:输出文件夹路径
7.4 转成onnx模型
为了之后推理方便,这里把模型转成onnx模型,onnx模型可以使用onnxruntime或者opencv dnn进行推理,也可以转成ncnn或者别的移动端可部署的模型进行推理,详细步骤可参考我之前的博客:使用深度学习解决拍照文档复杂背景二值化问题
运行以下命令:
python convert_to_onnx.py --input checkpoints/last.pth --output checkpoints/last.onnx