硬件:树霉派4b
1、下载并安装lidar_align
mkdir -p lidar_align/src
cd lidar_align/src
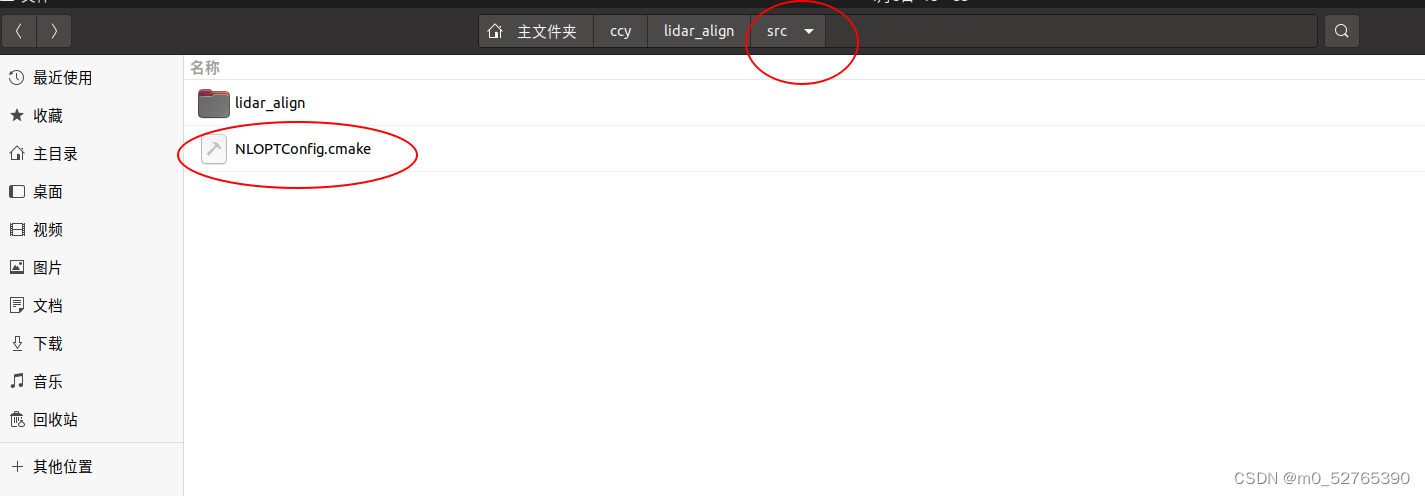
git clone https://github.com/ethz-asl/lidar_align.git将 lidar_align/src/lidar_align/NLOPTConfig.cmake 文件移动到 lidar_align/src/ 下(与lidar_align同级)
NLOPTConfig.cmake 文件移动前的位置:

NLOPTConfig.cmake 文件移动后的位置:
然后运行:
cd ..
catkin_make
(a)运行后,出现了错误: 没有找到pcl_ros包,因此需要安装这个包。可以查看我的另一篇文章ubuntu20.04中运行lego_slam算法-CSDN博客
(b)安装pcl_ros包后,删除编译生成的build、devel文件夹,重新 catkin_make 编译。这次编译可能会出现下面的错误:
In file included from /usr/include/pcl-1.10/pcl/pcl_macros.h:77,
from /usr/include/pcl-1.10/pcl/PCLHeader.h:10,
from /usr/include/pcl-1.10/pcl/point_cloud.h:47,
from /usr/include/pcl-1.10/pcl/common/transforms.h:42,
from /home/ubuntu/ccy/lidar_align/src/lidar_align/include/lidar_align/sensors.h:6,
from /home/ubuntu/ccy/lidar_align/src/lidar_align/src/sensors.cpp:1:
/usr/include/pcl-1.10/pcl/pcl_config.h:7:4: error: #error PCL requires C++14 or above
7 | #error PCL requires C++14 or above
| ^~~~~
In file included from /usr/include/pcl-1.10/pcl/console/print.h:44,
from /usr/include/pcl-1.10/pcl/conversions.h:53,
from /usr/include/pcl-1.10/pcl/common/impl/centroid.hpp:45,
from /usr/include/pcl-1.10/pcl/common/centroid.h:1098,
from /usr/include/pcl-1.10/pcl/common/transforms.h:44,
from /home/ubuntu/ccy/lidar_align/src/lidar_align/include/lidar_align/sensors.h:6,
from /home/ubuntu/ccy/lidar_align/src/lidar_align/src/sensors.cpp:1:
/usr/include/pcl-1.10/pcl/pcl_config.h:7:4: error: #error PCL requires C++14 or above
7 | #error PCL requires C++14 or above
从错误信息来看,PCL(Point Cloud Library)库要求使用C++14或更高版本的C++标准。编译环境似乎没有设置为使用C++14或更高版本。解决方法:
(1)打开你的lidar_align项目的CMakeLists.txt文件。
(2)在文件顶部添加下面两行CMake命令来设置C++标准。
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED True)(3)保存CMakeLists.txt文件。
(4)删除build目录,然后重新运行catkin_make构建项目。
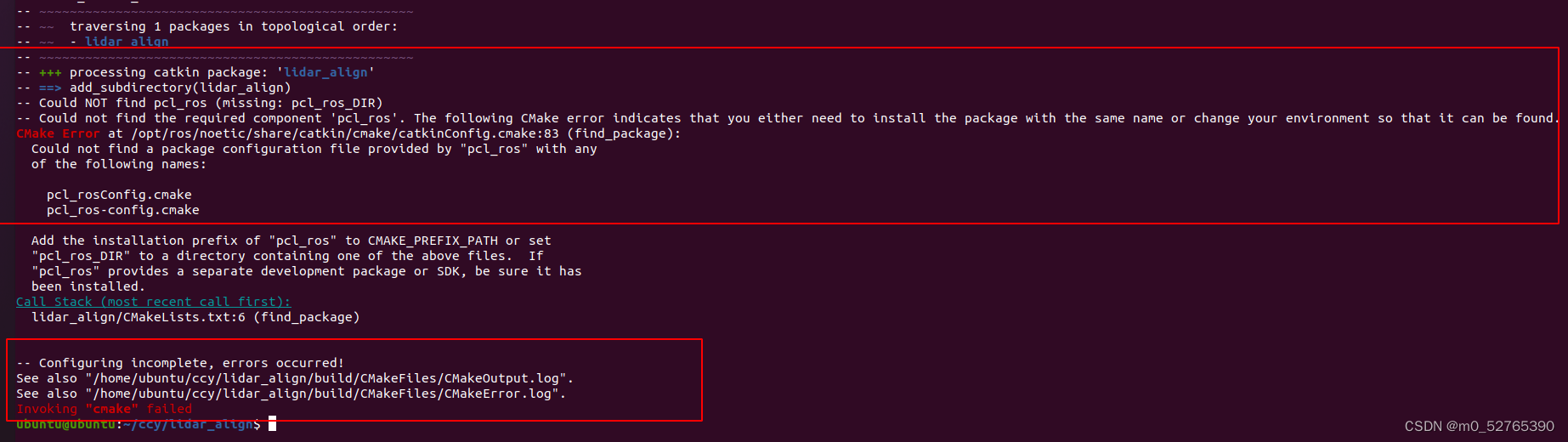
(c)编译之后,会出现下面的error:

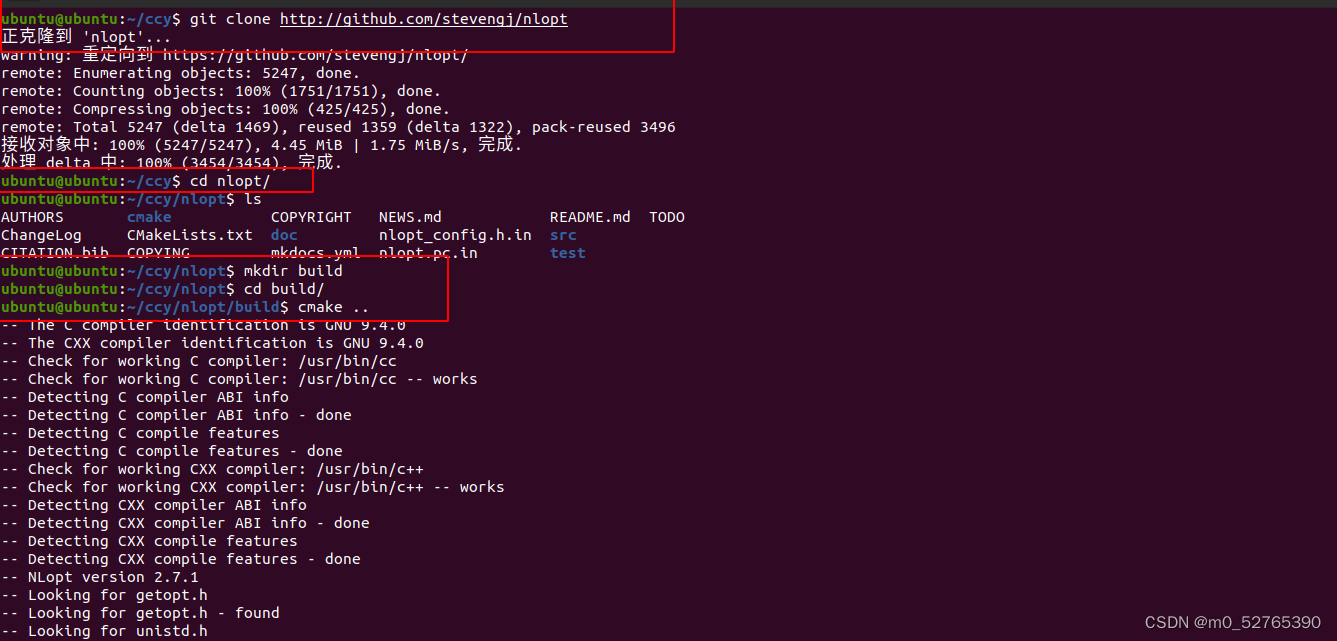
解决方案:安装nlopt
git clone http://github.com/stevengj/nlopt
cd nlopt/
mkdir build
cd build
cmake ..
make
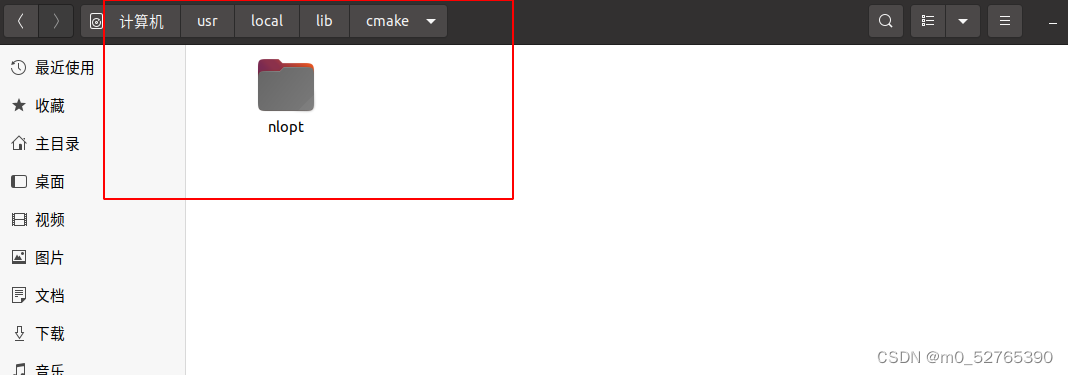
sudo make install
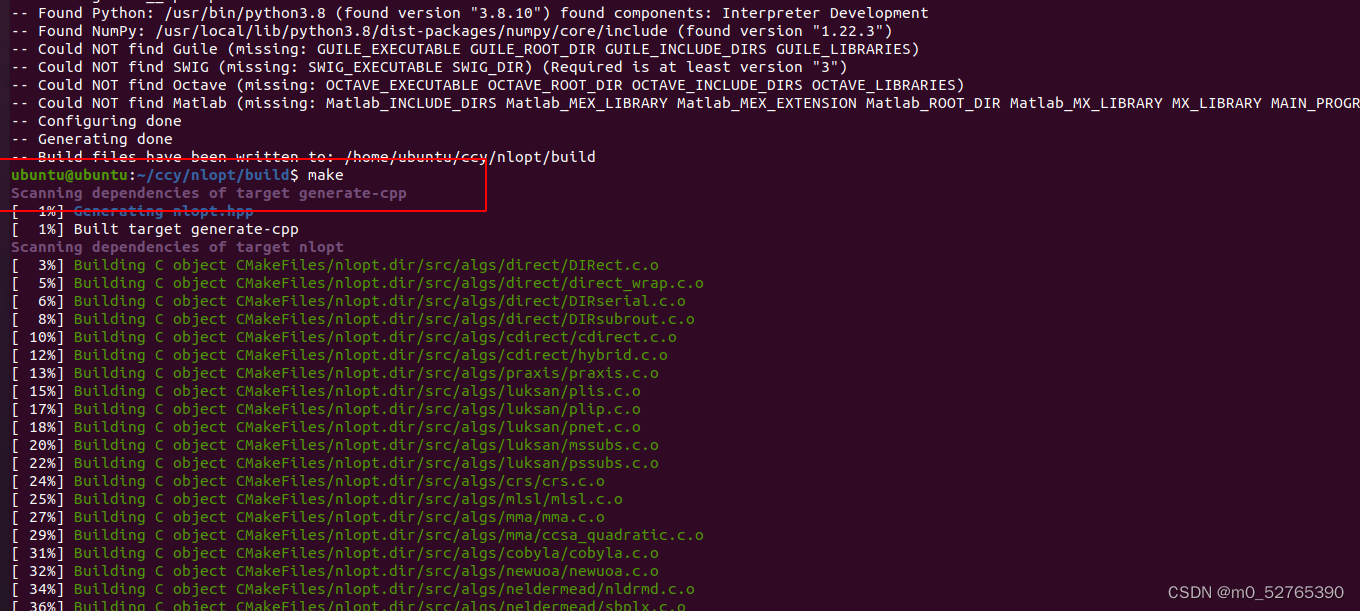

那么在 /usr/local/lib/cmake 目录下出现 nlopt 文件。
然后,在 lidar_align 工程目录下,并在CMakeLists.txt里加上以下内容:
list(APPEND CMAKE_FIND_ROOT_PATH ${CMAKE_SOURCE_DIR})
set (CMAKE_PREFIX_PATH "/usr/local/lib/cmake/nlopt")

以上操作结束后,回到 lidar_align工程中,删除build、devel后,重新 catkin_make
会出现警告,暂时先不管
2、lidar、imu分别上电,分别接入树霉派4B
2.1 天眸lidar的运行参考:获取天眸激光雷达点云图-CSDN博客
2.2 imu的运行:在 start_imu.sh 路径下运行以下命令:
./start_imu.sh
 启动imu和lidar后,查看ros话题:
启动imu和lidar后,查看ros话题:
分别输出 /pa_gs02/imu/data 和 /timoo_points 话题数据:
rostopic echo /timoo_points
rostopic echo /pa_gs02/imu/data2.3 录制数据包
录制的话题包括: /pa_gs02/imu/data 、 /timoo_points
新建 testbag 文件夹,在该文件夹下打开terminal,运行
//rosbag record -大写欧(小写o你的包名会自动加时间日期) 包名 要录的话题1 要录的话题2
rosbag record -O lidarimu.bag /pa_gs02/imu/data /timoo_points
//两分钟左右ctrl+c结束录制,包会自动保存在打开终端的testbag文件夹录制完成后,
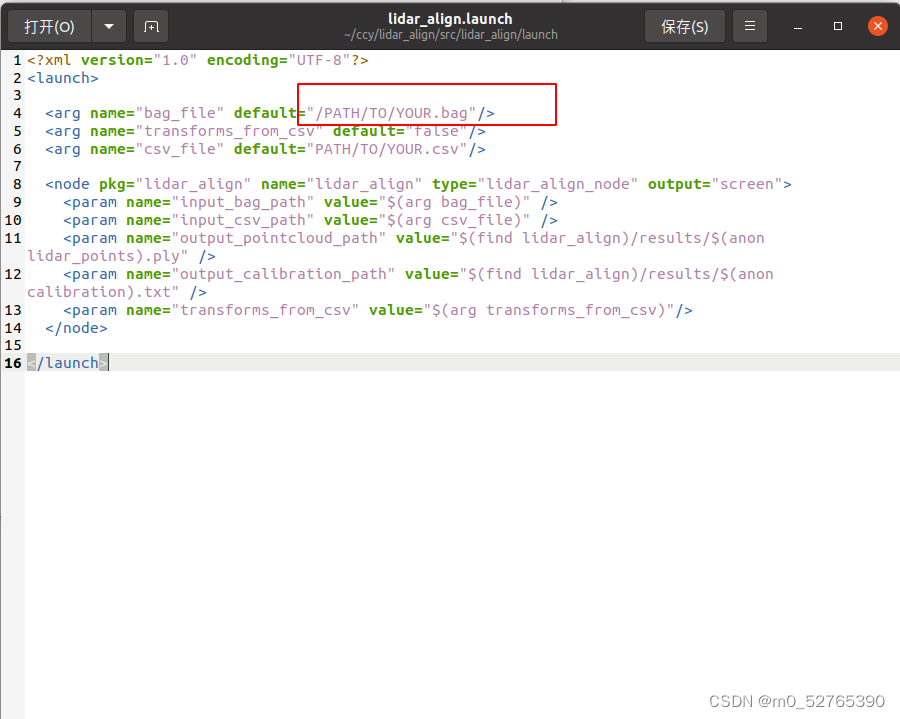
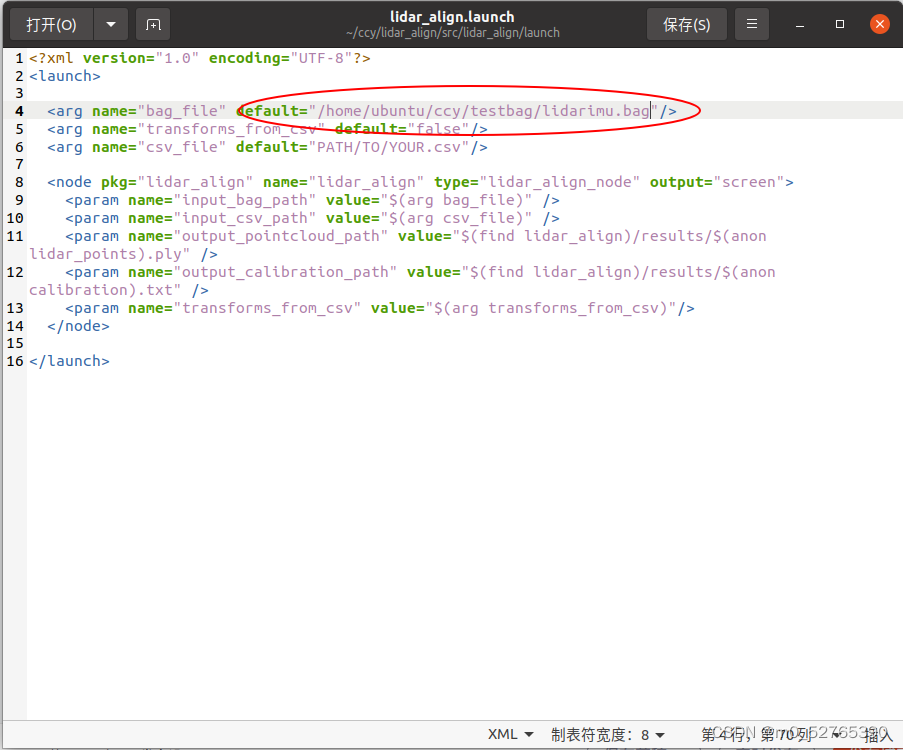
修改bag路径:
打开 /home/ubuntu/ccy/lidar_align/src/lidar_align/launch/lidar_align.launch ,修改 <arg name="bag_file" default="/PATH/TO/YOUR.bag"/> ,将 default="/PATH/TO/YOUR.bag"/> 替换为lidarimu.bag包的路径 /home/ubuntu/ccy/testbag/lidarimu.bag 。
修改 loader.cpp文件
首先在该文件顶部添加 #include <sensor_msgs/Imu.h,然后这个工具包原先是用来标定lidar和odom(里程计),所以需要将里程计接口替换为imu接口:
替换前:
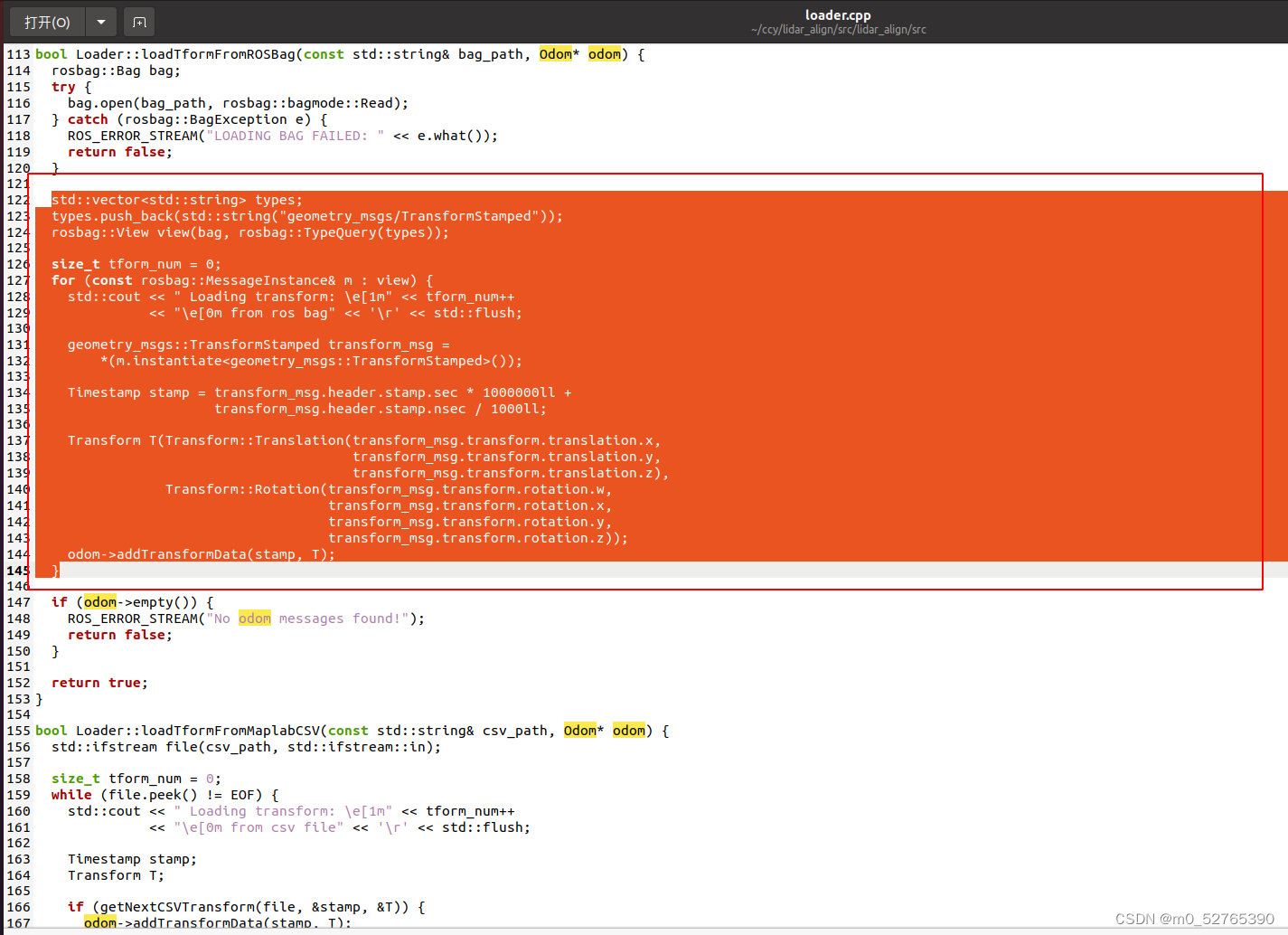
将上图中标记部分的代码注释掉,在注释之后位置添加:
types.push_back(std::string("sensor_msgs/Imu"));
rosbag::View view(bag, rosbag::TypeQuery(types));
size_t imu_num = 0;
double shiftX=0,shiftY=0,shiftZ=0,velX=0,velY=0,velZ=0;
ros::Time time;
double timeDiff,lastShiftX,lastShiftY,lastShiftZ;
for (const rosbag::MessageInstance& m : view){
std::cout <<"Loading imu: \e[1m"<< imu_num++<<"\e[0m from ros bag"<<'\r'<< std::flush;
sensor_msgs::Imu imu=*(m.instantiate<sensor_msgs::Imu>());
Timestamp stamp = imu.header.stamp.sec * 1000000ll +imu.header.stamp.nsec / 1000ll;
if(imu_num==1){
time=imu.header.stamp;
Transform T(Transform::Translation(0,0,0),Transform::Rotation(1,0,0,0));
odom->addTransformData(stamp, T);
}
else{
timeDiff=(imu.header.stamp-time).toSec();
time=imu.header.stamp;
velX=velX+imu.linear_acceleration.x*timeDiff;
velY=velX+imu.linear_acceleration.y*timeDiff;
velZ=velZ+(imu.linear_acceleration.z-9.801)*timeDiff;
lastShiftX=shiftX;
lastShiftY=shiftY;
lastShiftZ=shiftZ;
shiftX=lastShiftX+velX*timeDiff+imu.linear_acceleration.x*timeDiff*timeDiff/2;
shiftY=lastShiftY+velY*timeDiff+imu.linear_acceleration.y*timeDiff*timeDiff/2;
shiftZ=lastShiftZ+velZ*timeDiff+(imu.linear_acceleration.z-9.801)*timeDiff*timeDiff/2;
Transform T(Transform::Translation(shiftX,shiftY,shiftZ),
Transform::Rotation(imu.orientation.w,
imu.orientation.x,
imu.orientation.y,
imu.orientation.z));
odom->addTransformData(stamp, T);
}
}替换后:
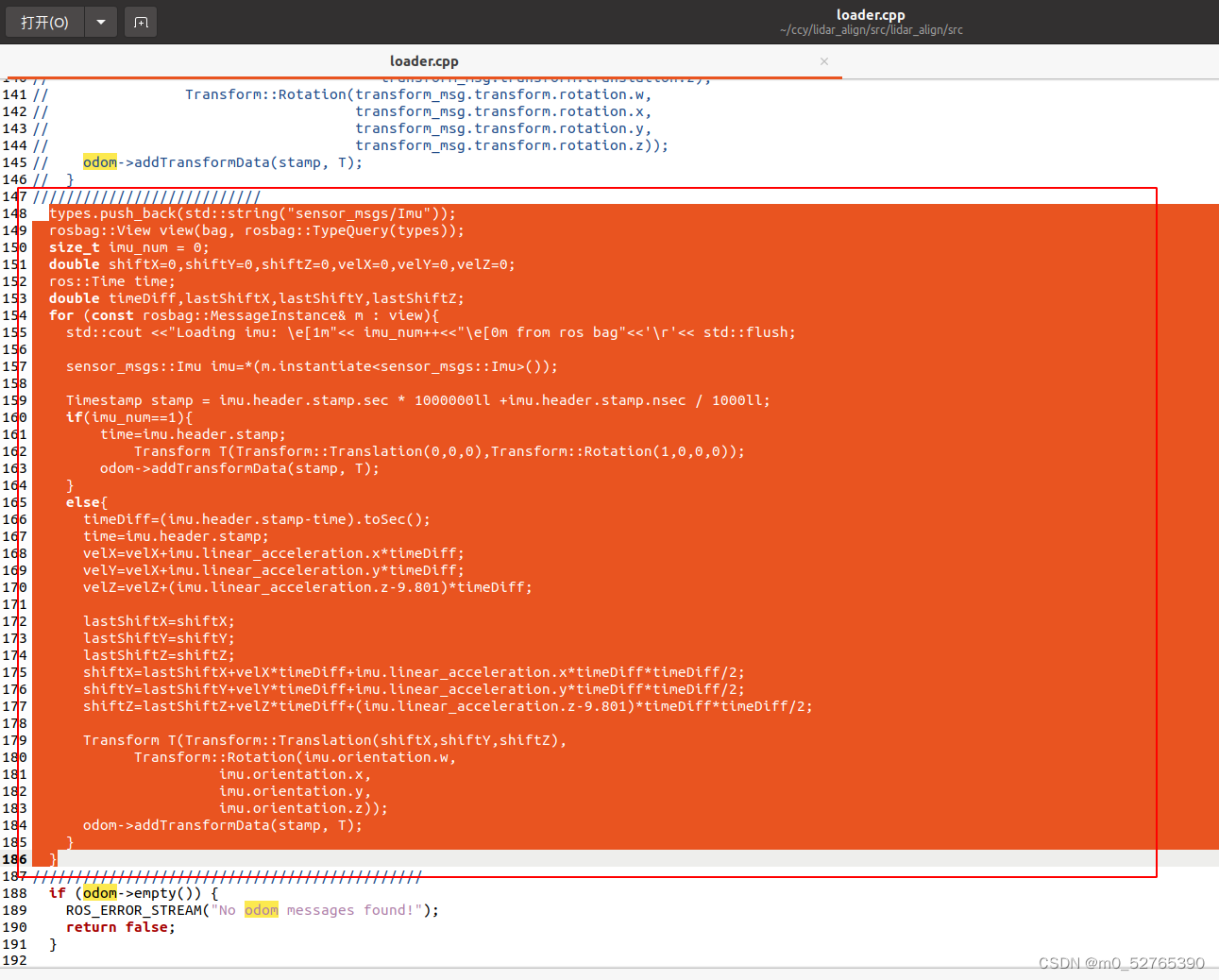
替换后,删除lidar_align工程下的 build、devel文件夹,再使用 catkin_make编译(过程中出现warning可以先不用管)
3 、标定
进入lidar_align工程,打开terminal,运行以下命令:
source devel/setup.bash
roslaunch lidar_align lidar_align.launch
开始标定迭代过程,上图中的Iteration表示迭代次数。
标定结束:
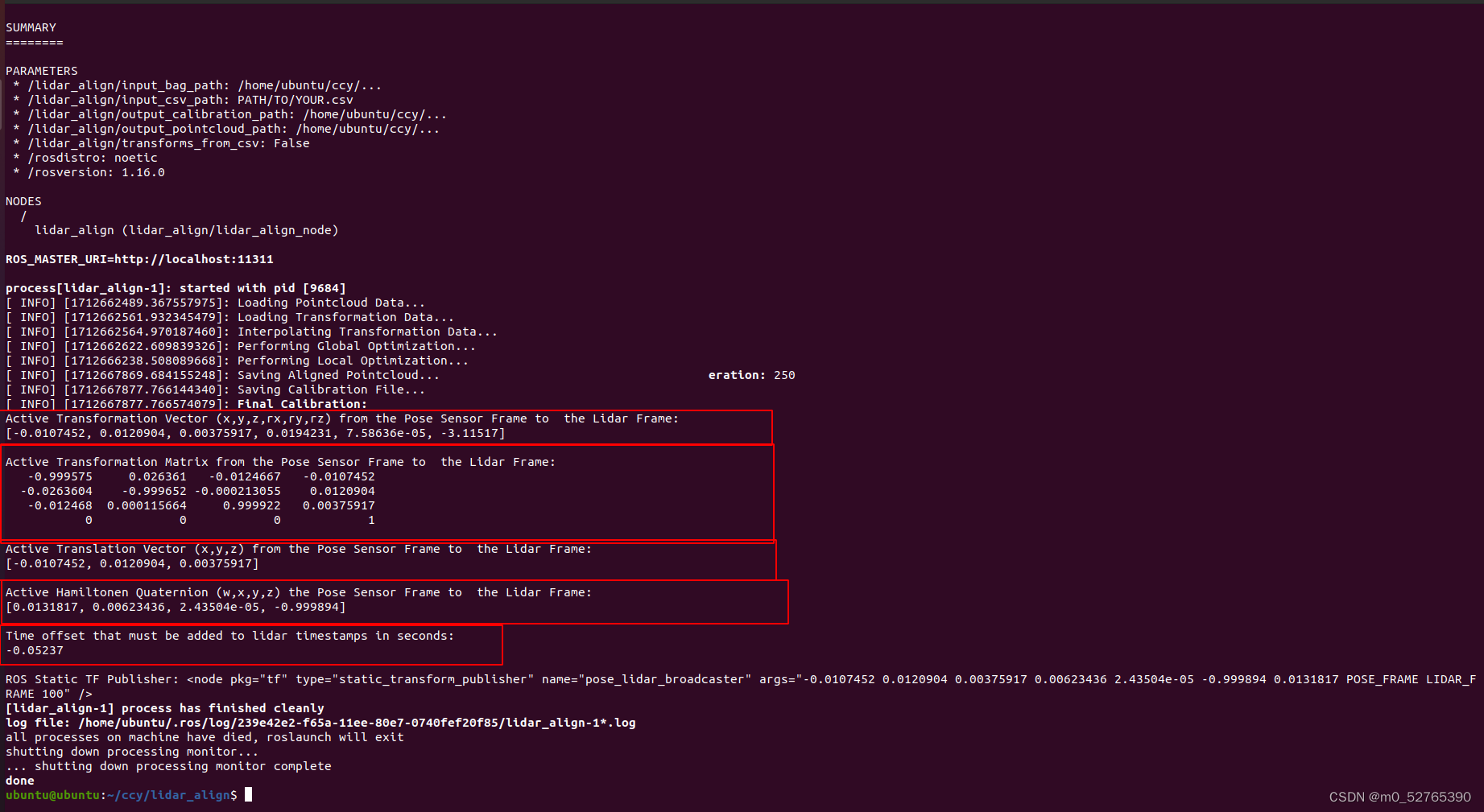
标定好之后会在终端显示出标定结果,也会在 result 文件夹下面生成对应的标定文件。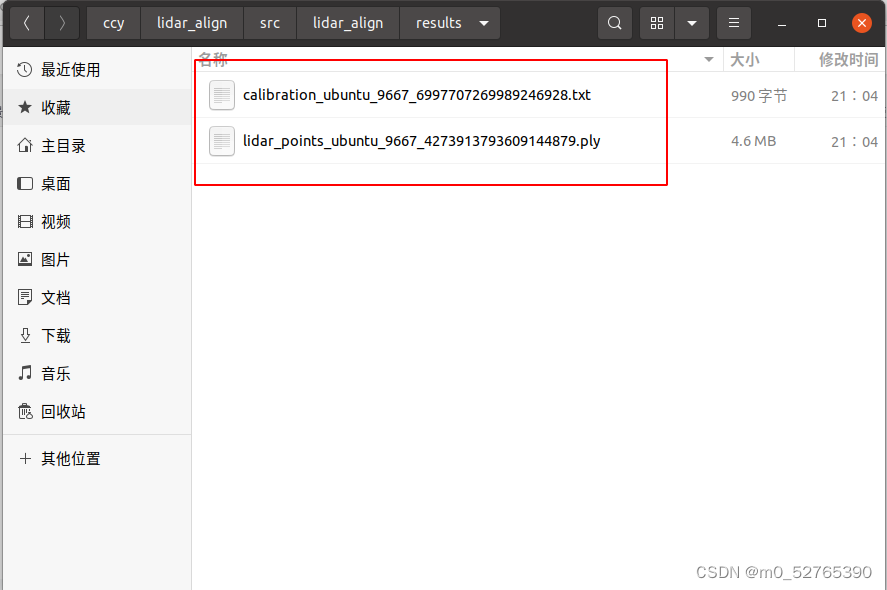
一个从姿态传感器imu坐标系到激光雷达坐标系的转换关系,包括平移向量、旋转矩阵、四元数和时间偏移。这些信息对于在ROS中正确对齐激光雷达数据至关重要。
-
平移向量:
-0.0107452, 0.0120904, 0.00375917这表示从姿态传感器坐标系到激光雷达坐标系在x、y、z轴上的平移量。
-
旋转矩阵:
这是一个3x3的矩阵,描述了从姿态传感器坐标系到激光雷达坐标系的旋转关系。
-
四元数:
[0.0131817, 0.00623436, 2.43504e-05, -0.999894]四元数提供了一种紧凑且不易出现奇异值的方式来描述三维旋转。
-
时间偏移:
-0.05237这表示在将激光雷达的时间戳用于姿态估计或对齐时,需要从这个时间戳中减去0.05237秒。



![Microsoft Visio 参与者 [actor] - 人的形状图标](https://img-blog.csdnimg.cn/direct/b023b7b6a59042389cfd6e827f0d0ba4.png#pic_center)

![[ritsec CTF 2024] 密码部分](https://img-blog.csdnimg.cn/direct/62db8a9c8e3c4216ac6f0070a1d60789.jpeg)